Изобретение относится к бесконтактным средствам контроля и измерения уровня и может быть использовано в автоматизированных системах управления технологическим производством.
Целью изобретения является повышение точности измерения уровня за счет уменьшения влияния искажений формы сигнала биений.
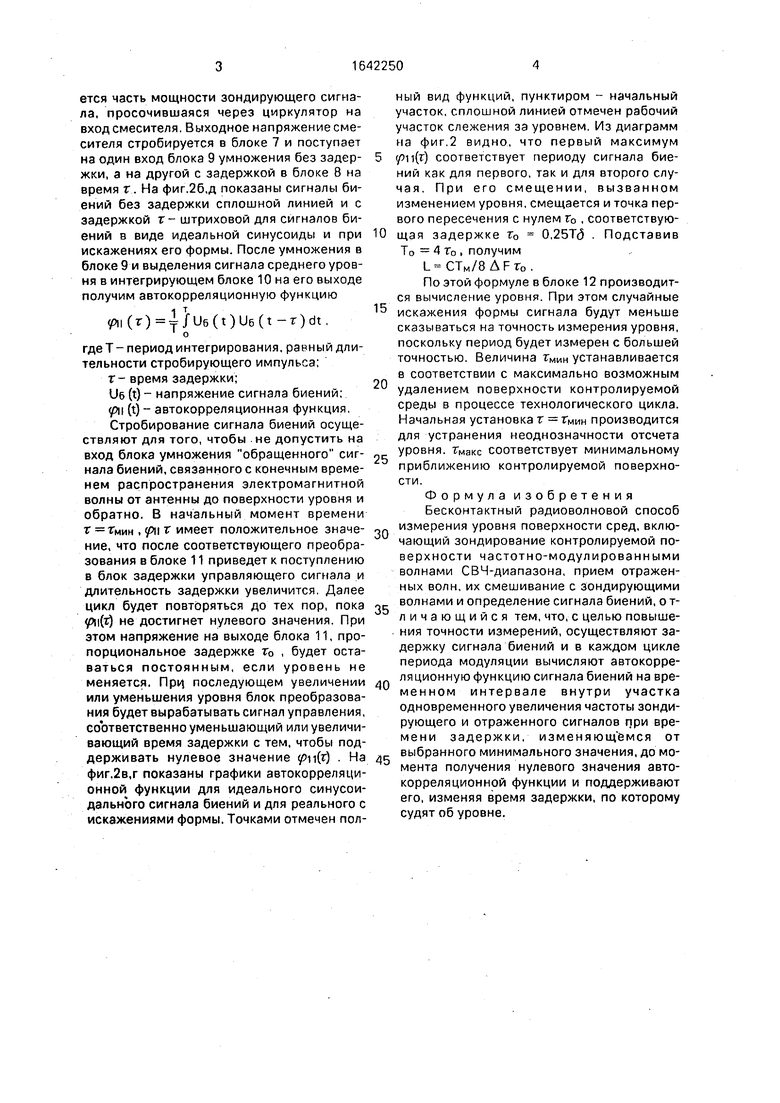
На фиг. 1 схематично показано устройство для осуществления предлагаемого способа; на фиг.2 - временные диаграммы его работы при сигнале биений в форме идеальной синусоиды и при наличии искажений формы и соответствующие графики автокорреляционной функции.
Устройство содержит генератор 1 линейно изменяющегося напряжения, управляющий частотой СВЧ-генератора 2,
соединенного через циркулятор 3 с антенной 4, расположенной над контролируемой поверхностью 5 и со смесителем 6, который через стробирующий блок 7 соединен с блоком 8 задержки и с одним входом блока 9 умножения, второй его вход соединен с выходом блока задержки. Выход блока умножения через интегрирующий блок 10 и блок 11 преобразования соединен с управляющим входом блока задержки и с вычислительным блоком 12.
Способ осуществляют следующим образом.
Модулированный СВЧ-сигнал (фиг.2г,а) через циркулятор 3 поступает в антенну 4, излучается, а после отражения от контролируемой поверхности 5 принимается антенной 4 и через циркулятор попадает на вход смесителя 6. В качестве опорного используО N Ю
ю ел
ется часть мощности зондирующего сигнала, просочившаяся через циркулятор на вход смесителя. Выходное напряжение смесителя стробируется в блоке 7 и поступает на один вход блока 9 умножения без задержки, а на другой с задержкой в блоке 8 на время т. На фиг.2б,д показаны сигналы биений без задержки сплошной линией и с задержкой т- штриховой для сигналов биений в виде идеальной синусоиды и при искажениях его формы. После умножения в блоке 9 и выделения сигнала среднего уровня в интегрирующем блоке 10 на его выходе получим автокорреляционную функцию
pil(r)4/U6(t)U6(t-r)dt, 1 о
где Т-период интегрирования, равный длительности стробирующего импульса;
т- время задержки;
Ue (t) - напряжение сигнала биений;
р (t) - автокорреляционная функция.
Стробирование сигнала биений осуществляют для того, чтобы не допустить на вход блока умножения обращенного сигнала биений, связанного с конечным временем распространения электромагнитной волны от антенны до поверхности уровня и обратно. В начальный момент времени t тмин , р т имеет положительное значение, что после соответствующего преобразования в блоке 11 приведет к поступлению в блок задержки управляющего сигнала и длительность задержки увеличится. Далее цикл будет повторяться до тех пор, пока (i) не достигнет нулевого значения. При этом напряжение на выходе блока 11, пропорциональное задержке т0 , будет оставаться постоянным, если уровень не меняется. При последующем увеличении или уменьшения уровня блок преобразования будет вырабатывать сигнал управления, соответственно уменьшающий или увеличивающий время задержки с тем, чтобы поддерживать нулевое значение (г) . На фиг.2в,г показаны графики автокорреляционной функции для идеального синусоидального сигнала биений и для реального с искажениями формы. Точками отмечен полный вид функций, пунктиром - начальный участок, сплошной линией отмечен рабочий участок слежения за уровнем. Из диаграмм на фиг.2 видно, что первый максимум
уэп(г) соответствует периоду сигнала биений как для первого, так и для второго случая. При его смещении, вызванном изменением уровня, смещается и точка первого пересечения с нулем г0 , соответствую0 щая задержке Т0 - 0, . Подставив То 4 TO , получим L CTM/8 ДРГо.
По этой формуле в блоке 12 производится вычисление уровня. При этом случайные
5 искажения формы сигнала будут меньше сказываться на точность измерения уровня, поскольку период будет измерен с большей точностью. Величина гмин устанавливается в соответствии с максимально возможным
f)
и удалением, поверхности контролируемой среды в процессе технологического цикла. Начальная установка т гмин производится для устранения неоднозначности отсчета уровня. Гмакс соответствует минимальному приближению контролируемой поверхности.
Формула изобретения Бесконтактный радиоволновой способ измерения уровня поверхности сред, включающий зондирование контролируемой поверхности частотно-модулированными волнами СВЧ-диапазона, прием отраженных волн, их смешивание с зондирующими волнами и определение сигнала биений, о т- личающийся тем, что, с целью повышения точности измерений, осуществляют задержку сигнала биений и в каждом цикле периода модуляции вычисляют автокорреляционную функцию сигнала биений на вре- менном интервале внутри участка одновременного увеличения частоты зондирующего и отраженного сигналов при времени задержки, изменяющемся от выбранного минимального значения, до момента получения нулевого значения автокорреляционной функции и поддерживают его, изменяя время задержки, по которому судят об уровне.
5
5
0
5
Г11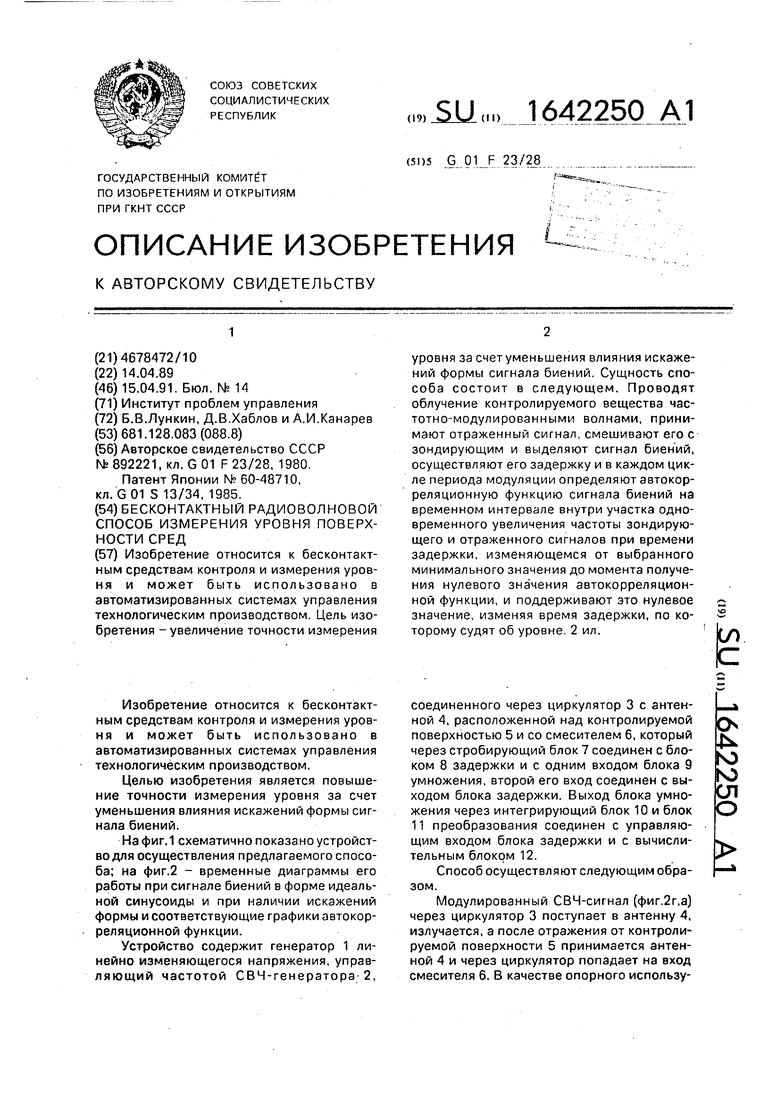
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный радиоволновый способ измерения уровня и устройство для его осуществления | 1989 |
|
SU1700379A1 |
| БЕСКОНТАКТНОЕ РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ДИЭЛЕКТРИЧЕСКИХ МАТЕРИАЛОВ | 2013 |
|
RU2528131C1 |
| БЕСКОНТАКТНЫЙ ИМПУЛЬСНО-ФАЗОВЫЙ СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ РАЗДЕЛА РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ УРОВНЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1998 |
|
RU2152595C1 |
| БЕСКОНТАКТНЫЙ РАДИОВОЛНОВЫЙ УРОВНЕМЕР | 2017 |
|
RU2649665C1 |
| Интерферометрический гомодинный радиолокатор | 2018 |
|
RU2689397C1 |
| Способ измерения уровня жидкости и сыпучих сред в емкости | 2016 |
|
RU2626386C1 |
| Гомодинный радиолокатор со сканированием диаграммы направленности антенны | 2018 |
|
RU2702190C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МОРСКИХ ВОЛН | 2012 |
|
RU2523102C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ВЗАИМНЫХ СМЕЩЕНИЙ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ЗДАНИЙ И СООРУЖЕНИЙ | 2016 |
|
RU2621473C1 |
| Гомодинный радиолокатор с многоканальным приемо-передающим трактом | 2018 |
|
RU2700654C1 |
Изобретение относится к бесконтактным средствам контроля и измерения уровня и может быть использовано в автоматизированных системах управления технологическим производством. Цель изобретения - увеличение точности измерения уровня за счет уменьшения влияния искажений формы сигнала биений. Сущность способа состоит в следующем. Проводят облучение контролируемого вещества частотно-модулированными волнами, принимают отраженный сигнал, смешивают его с зондирующим и выделяют сигнал биений, осуществляют его задержку и в каждом цикле периода модуляции определяют автокорреляционную функцию сигнала биений на временном интервале внутри участка одновременного увеличения частоты зондирующего и отраженного сигналов при времени задержки, изменяющемся от выбранного минимального значения до момента получения нулевого зна чения автокорреляционной функции, и поддерживают это нулевое значение, изменяя время задержки, по которому судят об уровне 2 ил. Ё
$
TW Ј«9КЈ /Ј
1мин Г/у/9кс 7Ј
| Уровнемер | 1980 |
|
SU892221A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
