Предлагаемое изобретение относится к измерительной технике и может быть использовано в метеорологии, навигации, океанографических исследованиях, мореходных испытаниях судов и гидросамолетов для оценки силы волнения морских волн, в автоматизированных системах посадки самолетов-амфибий на водную поверхность в ночное и дневное время.
Известны устройства для определения параметров морских волн, защищенные патентами РФ №416563, кл. G01C 13/00, 1971 г., №349683, кл. G01C 13/00, 1974 г., содержащие приемник гидростатического давления с электропреобразователем, нуль-орган, схему сравнения, генератор времени, усредняющий фильтр и индикатор.
Работа этих устройств основана на контактном преобразовании давления морских волн в электрический сигнал и дальнейшем измерении параметров этого сигнала.
Признаками, общими с признаками заявляемого устройства, у этих устройств являются усредняющий фильтр и индикатор.
Причиной, препятствующей достижению в этих устройствах технического результата, обеспечиваемого изобретением, является довольно узкая область применения, обусловленная необходимостью контактного преобразования давления морских волн в электрический сигнал.
Известно также устройство для измерения параметров морских волн, защищенное патентом РФ №726422, кл. G01C 13/00, 1977 г., содержащее приемопередатчик с антенной, нуль-орган, схему сравнения, генератор времени, усредняющий фильтр и индикатор.
В этом устройстве контактное преобразование морских волн заменено бесконтактным с помощью приемопередатчика.
Признаками этого аналога, общими с признаками заявляемого устройства, являются приемопередатчик с антенной, усредняющий фильтр и индикатор.
Причинами, препятствующими достижению в этом аналоге технического результата, обеспечиваемого изобретением, являются ограниченность области измеряемых параметров и относительно низкая точность их измерения. Следует отметить, что эти недостатки присущи и устройствам, защищенным патентами РФ №№416563 и 549683.
Наиболее близким по технической сущности к заявляемому (прототипом) является устройство для измерения параметров морских волн, защищенное патентом РФ №2036429, кл. G01C 13/00, 1990 г. Оно содержит приемопередатчик с антенной, усилитель доплеровского сигнала, индикатор и автокоррелятор, включающий в себя смеситель, линию задержки с отводами, коммутатор, усредняющий фильтр, компаратор, генератор импульсов, счетчик импульсов, дешифратор и управляющий ключ.
Признаками, общими с признаками заявляемого устройства, у устройства-прототипа являются приемопередатчик с антенной, усилитель доплеровского сигнала и индикатор.
Работа прототипа основана на облучении морской поверхности радиоимпульсами с постоянными параметрами, выделении из радиолокационного (отраженного от морской поверхности) сигнала доплеровской составляющей, обусловленной скоростью перемещения морских волн, определении автокорреляционной функции этой составляющей и измерении времени спадания этой функции от максимального значения до нуля. Это время характеризует степень волнения моря и в принципе может быть пересчитано в баллы по шкале Бофорта. Время спадания автокорреляционной функции от максимального значения до нуля отображается на индикаторе.
Причинами, препятствующими достижению в устройстве-прототипе технического результата, обеспечиваемого изобретением, являются относительно низкие точность, быстродействие и надежность прототипа. Это обусловлено тем, что автокоррелятор выполнен аналоговым и содержит достаточно большое число элементов, что делает его сложным, а следовательно, и отрицательно сказывается на его надежности. Само по себе аналоговое выполнение автокоррелятора не позволяет реализовать высокую точность расчета корреляционной функции, а наличие аналогового блока, выполняющего функцию усредняющего фильтра, требует на реализацию этой функции значительных затрат времени.
Еще одной причиной, препятствующей достижению в прототипе технического результата, обеспечиваемого изобретением, являются достаточно ограниченные функциональные возможности прототипа. Он позволяет определить лишь автокорреляционную функцию доплеровской составляющей отраженного от морской поверхности сигнала и время спадания этой функции от максимума до нулевого уровня. Это время собственно и является результатом измерения и отражается на индикаторе. Оно недостаточно полно характеризует морское волнение. Для более полной характеристики волнения морской поверхности желательно иметь полную автокорреляционную функцию доплеровской составляющей отраженного от морской поверхности сигнала, а также ее спектр и закон распределения. Получить эти характеристики устройство-прототип не позволяет.
Технической задачей, на решение которой направлено изобретение, является упрощение и расширение функциональных возможностей устройства, а также повышение его быстродействия, точности и надежности.
Для достижения указанного технического результата в известное устройство для измерения параметров морских волн, содержащее приемопередатчик с антенной, усилитель доплеровского сигнала, вход которого соединен с выходом приемопередатчика, и индикатор, введены последовательно соединенные аналого-цифровой преобразователь, вход которого соединен с выходом усилителя доплеровского сигнала, и вычислитель, второй вход которого является входом устройства, первый выход соединен с управляющим входом приемопередатчика, а второй выход - со входом индикатора.
Отсутствуют какие-либо источники информации, в которых вновь введенные элементы были бы описаны в совокупности с остальными элементами заявляемого устройства. Поэтому предлагаемое устройство следует считать новым и имеющим изобретательский уровень.
Сущность изобретения поясняется чертежом, на котором приведена структурная схема заявляемого устройства.
Устройство содержит последовательно включенную антенну 1, приемопередатчик 2, усилитель 3 доплеровского сигнала, аналого-цифровой преобразователь 4 и вычислитель 5, второй вход которого соединен со входом 6 устройства, а первый выход - с управляющим входом приемопередатчика. Кроме того, устройство оснащено индикатором (дисплеем) 7, вход которого соединен со вторым выходом вычислителя 5.
Работа устройства состоит в следующем.
Приемопередатчик 2 генерирует и излучает через антенну 1 в направлении морской поверхности радиоимпульсы зондирующего сигнала с заданными параметрами. Параметры зондирующего сигнала (мощность, длительность, скважность, несущая частота) вырабатываются вычислителем 5 в соответствии с высотой полета носителя устройства, код которой поступает на вход 6 устройства. Выработанные вычислителем 5 заданные параметры зондирующего сигнала поступают с его первого выхода на управляющий вход приемопередатчика 2.
Отражаясь от морской поверхности, излученный зондирующий сигнал превращается в эхо-сигнал, имеющий случайный характер. Он принимается антенной 1 и поступает в приемник приемопередатчика 2, где из него выделяется доплеровская составляющая, обусловленная скоростью перемещения морских волн. Эта составляющая с выхода приемника приемопередатчика 2 поступает на вход усилителя 3. В усилителе 3 поступивший на его вход сигнал дополнительно фильтруется (из него выделяются только доплеровские частоты), усиливается и поступает на вход преобразователя 4.
В преобразователе 4 аналоговый доплеровский сигнал преобразуется в цифровую форму (квантуется), то есть преобразуется в последовательность отстоящих друг от друга по времени t на шаг квантования Δt цифровых кодов, соответствующих уровням отстоящих на этот шаг входного аналогового сигнала. Шаг Δt квантования в соответствии с теоремой Котельникова выбирается из условия:
где Fmax - максимальная частота в спектре доплеровского сигнала.
С выхода преобразователя 4 преобразованный в последовательность цифровых кодов доплеровский сигнал поступает на вход вычислителя 5.
В вычислителе 5 рассчитывается гистограмма распределения численных значений поступивших на его вход цифровых кодов, соответствующая плотности распределения вероятностей текущего уровня x(t) доплеровского сигнала (закону распределения).
Кроме того, в вычислителе 5 рассчитывается автокорреляционная функция Rx:(τ) доплеровского сигнала x(t). Расчет ведется в соответствии с уравнением:

где τ - аргумент автокорреляционной функции, то есть временная задержка между исследуемым сигналом и его копией.
Черта над произведением x(t)·x(t+τ) означает его усреднение.
В вычислителе 5 рассчитывается также спектр (спектральная плотность) Sx(ω) доплеровского сигнала x(t), связанный с корреляционной функцией Rx(τ) преобразованием Фурье:

Устройство достаточно легко реализуемо.
В качестве вычислителя 5 может служить бортовой компьютер носителя устройства. Результаты расчета могут быть получены как в виде таблиц, так и в виде графиков. Они выносятся на индикатор 7, в качестве которого может быть использован дисплей, с помощью которого осуществляется программирование и отладка программ, реализующих описанные расчеты. В качестве остальных элементов устройства могут быть использованы те же элементы, что и в устройстве-прототипе.
Нетрудно видеть, что в заявляемом устройстве по сравнению с прототипом значительно сокращена аппаратурная часть, так как аналоговое исполнение автокоррелятора заменено дополнительным программированием компьютера, который, как правило, уже входит в состав носителя устройства. Сокращение аппаратурного состава устройства значительно упрощает его и повышает его надежность. Кроме того, это повышает быстродействие и точность расчета автокорреляционной функции, так как компьютер, работая с сигналами в цифровой форме, позволяет выполнить все расчеты быстрее и точнее, чем аналоговый автокоррелятор, реализованный на физических блоках (смеситель, линия задержки с отводами, коммутатор, усредняющий фильтр, управляемый ключ, компаратор, счетчик импульсов, дешифратор). Очевидно также, что функциональные возможности заявляемого устройства значительно шире, чем у устройства-прототипа, так как оно позволяет определить не только время спадания корреляционной функции от максимума до нуля, а и всю корреляционную функцию. Кроме того, оно позволяет определить и отразить на экране дисплея как корреляционную функцию, так и закон распределения и спектр доплеровского сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МОРСКИХ ВОЛН | 1990 |
|
RU2036429C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2489721C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2510040C2 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| ПРИБОР ДЛЯ СТАТИСТИЧЕСКОГО ИССЛЕДОВАНИЯ РАСПРЕДЕЛЕНИЯ ЭНЕРГИИ БЛИКОВЫХ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ОТ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2422853C1 |
Изобретение относится к измерительной технике и может быть использовано в метеорологии, навигации, океанографических исследованиях, мореходных испытаниях судов и гидросамолетов для оценки силы волнения морских волн, в автоматизированных системах посадки самолетов-амфибий на водную поверхность в ночное и дневное время. Устройство содержит последовательно включенные антенну 1, приемопередатчик 2, усилитель 3 доплеровского сигнала, аналого-цифровой преобразователь 4 и вычислитель 5, второй вход которого соединен с входом 6 устройства, а первый выход - с управляющим входом приемопередатчика. Кроме того, устройство оснащено индикатором (дисплеем) 7, вход которого соединен со вторым выходом вычислителя 5. Технический результат: сокращение аппаратурной части, упрощение, повышение надежности, повышение быстродействия и точности расчета. 1 ил.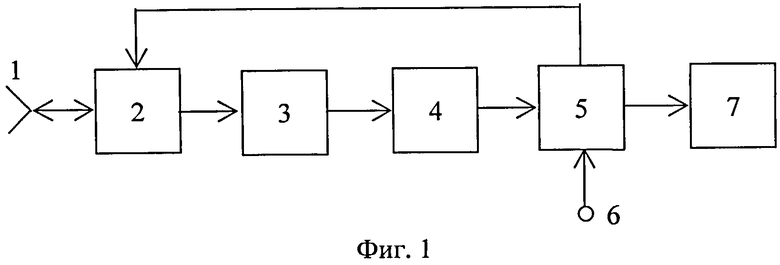
Устройство для измерения параметров морских волн, содержащее приемопередатчик с антенной, усилитель доплеровского сигнала, вход которого соединен с выходом приемопередатчика, и индикатор, отличающееся тем, что в него введены последовательно соединенные аналого-цифровой преобразователь, вход которого соединен с выходом усилителя доплеровского сигнала, и вычислитель, второй вход которого является входом устройства, первый выход соединен с управляющим входом приемопередатчика, а второй выход - со входом индикатора.
| Булатов М.Г., Раев М.Д., Скворцов Е.И | |||
| "Новый прибор для определния дисперсионных характеристик гравитационно-капилярных волн" | |||
| Современные проблемы дистанционного зондирования Земли из космоса | |||
| Сборник научных статей | |||
| РАН Институт космических исследований | |||
| Москва | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU273A1 |
| Булатов М.Г., Раев М.Д., Скворцов Е.И. | |||

