Изобретение относится к высокоизмерительному приборостроению и предназначено для использования при аттестации динамических характеристик с силЬвой компенсацией на базе магнитоэлектрических преобразователей.
Цель изобретения - повышение точности и расширение функциональных возможностей за счет определения степени затухания частоты собственных колебаний подвижной части весов.
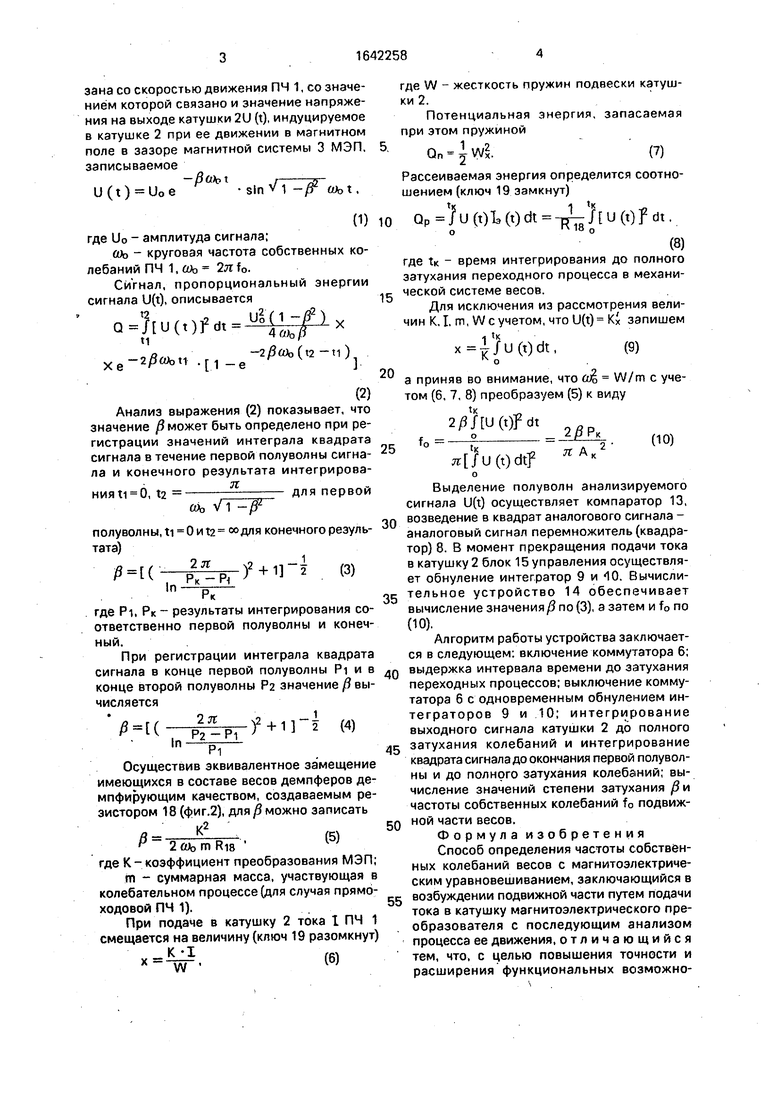
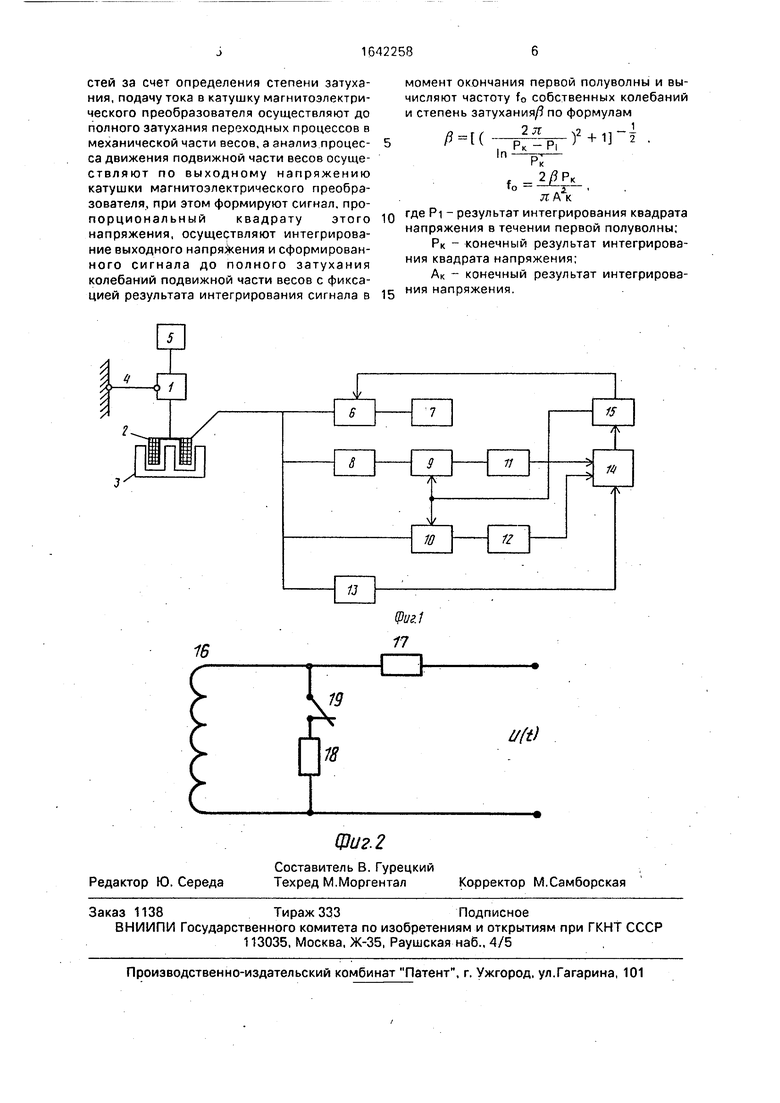
На фиг.1 представлена блок-схема устройства для осуществления способа; на фиг.2 - схема эквивалентной трансформации МЭП.
Устройство включает подвижную часть 1 {ПЧ) весов, катушку 2 и магнит 3 магнитоэлектрического преобразователя (МЭП), упругий элемент 4 подвески ПЧ, узе 5 балансировки весов, коммутатор 6, генератор 7 постоянного тока, схему 8 умножения (квадратор), аналогичные интеграторы 9 и 10, аналого-цифровые преобразователи 11 и 12, компаратор 13, вычислительное устройство 14,блок 15 управления.
Кроме того, устройство содержит катушку 16 МЭП, сопротивление 17, эквивалентное сопротивление 18 потерь, обуславливающих степень затухания ПЧ 1, ключ 19.
В основе теоретического содержания предлагаемого изобретения представление о степени затухания, как о показателе рассеивания энергии, запасаемой в механизме весов при подаче в катушку МЭП импульса тока. При этом рассеиваемая мощность свя -f ttbt
зама со скоростью движения ПЧ 1, со значением которой связано и значение напряжения на выходе катушки 2U (t), индуцируемое в катушке 2 при ее движении в магнитном поле в зазоре магнитной системы 3 МЭП, записываемое
)bt
U(t) U0e
(1) где Uo - амплитуда сигнала;
(Оо - круговая частота собственных колебаний ПЧ 1, Шо 2л f0.
Сигнал, пропорциональный энергии сигнала U(t), описывается
°-uuo f4.
х..1-.()
(2)
Анализ выражения (2) показывает, что значение /Сможет быть определено при регистрации значений интеграла квадрата сигнала в течение первой полуволны сигнала и конечного результата интегрирова3Z
нияХ1 0, t2 - для первой
(Оо V1 -F
полуволны, ti 0 и tz оо для конечного результата)
ЖЕГ + 1Г (3
0(
где PI, Рк - результаты интегрирования соответственно первой полуволны и конечный.
При регистрации интеграла квадрата сигнала в конце первой полуволны Pi и в конце второй полуволны Р2 значение ft вычисляется
2 Пч2 . . , - |
/(
In
Р2-Р1
Р1
+
(4)
Осуществив эквивалентное замещение имеющихся в составе весов демпферов демпфирующим качеством, создаваемым резистором 18 (фиг.2), для / можно записать
0
К
(5)
2ftJbm Rie где К - коэффициент преобразования МЭП;
m - суммарная масса, участвующая в колебательном процессе (для случая прямо- ходовой ПЧ 1).
При подаче в катушку 2 тока 1 ПЧ 1 смещается на величину (ключ 19 разомкнут)
К Х(6)
х
W
где W - жесткость пружин подвески катушки 2.
Потенциальная энергия, запасаемая при этом пружиной
Qn W.
(7)
Рассеиваемая энергия определится соотношением (ключ 19 замкнут)
(t)l3(t)dt (t)f dt.
оГЛ Ь о
(8)
где т. - время интегрирования до полного затухания переходного процесса в механической системе весов.
Для исключения из рассмотрения величин К, I, m, W с учетом, что U(t) Ki запишем
1 5
х Ј / и (t) dt,
(9)
а приняв во внимание, что ui W/m с учетом (6, 7, 8) преобразуем (5) к виду
tK
(t)2dt
fo tK
2рРк
(г);р
П A.
(10)
Выделение полуволн анализируемого сигнала U(t) осуществляет компаратор 13,
возведение в квадрат аналогового сигнала - аналоговый сигнал перемножитель (квадратор) 8. В момент прекращения подачи тока в катушку 2 блок 15 управления осуществляет обнуление интегратор 9 и 10. Е ычислительное устройство 14 обеспечивает вычисление значения/ по (3), а затем и fo по (Ю).
Алгоритм работы устройства заключается в следующем: включение коммутатора 6;
выдержка интервала времени до затухания переходных процессов; выключение коммутатора б с одновременным обнулением интеграторов 9 и 10; интегрирование выходного сигнала катушки 2 до полного
затухания колебаний и интегрирование квадрата сигнала до окончания первой полуволны и до полного затухания колебаний; вычисление значений степени затухания / и частоты собственных колебаний f0 подвижной части весов.
Формула изобретения Способ определения частоты собственных колебаний весов с магнитоэлектрическим уравновешиванием, заключающийся в
возбуждении подвижной части путем подачи тока в катушку магнитоэлектрического преобразователя с последующим анализом процесса ее движения, отличающийся тем, что, с целью повышения точности и расширения функциональных возможностей за счет определения степени затухания, подачу тока в катушку магнитоэлектрического преобразователя осуществляют до полного затухания переходных процессов в механической части весов, а анализ процесса движения подвижной части весов осуще- ствляют по выходному напряжению катушки магнитоэлектрического преобразователя, при этом формируют сигнал, про- порциональный квадрату этого напряжения, осуществляют интегрирование выходного напряжения и сформированного сигнала до полного затухания колебаний подвижной части весов с фиксацией результата интегрирования сигнала в
момент окончания первой полуволны и вычисляют частоту f0 собственных колебаний и степень затухания/ по формулам
/5()2+lH
In
Рк - Pi
Р7 f -Mp
ТоL- -
л: А к
где PI - результат интегрирования квадрата напряжения в течении первой полуволны;
РК - конечный результат интегрирования квадрата напряжения;
Ак - конечный результат интегрирова- ния напряжения.
Изобретение относится к весоизмерительному приборостроению и предназначено для использования при аттестации динамических характеристик весов с силовой компенсацией на базе магнитоэлектрических преобразователей. Целью изобретения является повышение точности определения значений степени затухания и частоты собственных колебаний подвижной части весов. При возбуждении подвижной части весов в катушку магнитоэлектрического преобразователя подают ток до полного затухания переходных процессов в механической части весов, затем прекращают подачу тока и формируют сигнал, пропорциональный квадрату выходного сигнала катушки магнитоэлектрического преобразователя, осуществляют интегрирование выходного сигнала катушки и квадрата этого сигнала до полного затухания переходных процессов в механической части весов, регистрируют промежуточный результат интегрирования квадрата первой полуволны сигнала катушки и вычисляют степень затухания и частоту собственных колебаний подвижной части. 2 ил. СО с
I/ft)
| Способ определения частоты собственных колебаний подвижной части электромеханического преобразователя с электромагнитной связью | 1986 |
|
SU1516798A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Туричин A.M | |||
| и др | |||
| Электрические измерения неэлектрических величин | |||
| Л ; Энергия, 1975 | |||
| с | |||
| Способ укрепления под покрышкой пневматической шины предохранительного слоя или манжеты | 1917 |
|
SU185A1 |
