1
Изобретение относится к области йнформационно-иамеригельной техники и можег найти широкое применение для преобразования постоянных и медленно меняющихся давлений во время-имаульсный выходной сигнал и построения цифровых маномегров,Известны манометры с время-импуль- сными выходным сигналом, построенные по методу двухтактного интегрирования, в которых в качестве чувствительного к давлению элемента используют неуплот- ненный поршень, и характеризующийся отсутствием статической ошибки и погрешности от дрейфа нуля чувствительного элемента.
Однако необходимость вращения, гщагельной притирки поршневой пары, стро го вертикальное положение поршня, центрирование весового опорного элемента с поршнем и т,д, значительно снижают надежность и помехоустойчивость, а значит и сужают область их применения.
Навбопее близким решением к предл гаемому изобретению является манометр; содержащий в качестве чувствите/шнрго элемента заполненный рабочей жидкостьк) сильфон, соединенный с источником давления нерегулируемым дросселем.
Сильфон жестко соединен с коротким плечом рычага. На длинном конце рычага установлен каркас с катушками магнитоэлектрического преобразователя (МЭП). На конце рычага установлены два контакта положения дискриминатора перемещения (датчика положения), подключенного к схеме управления, выход которой управляет коммутатором тока. Последний коммугирует ГОК стабилизатора гока в катушках магнитоэлектрического преобразователя,
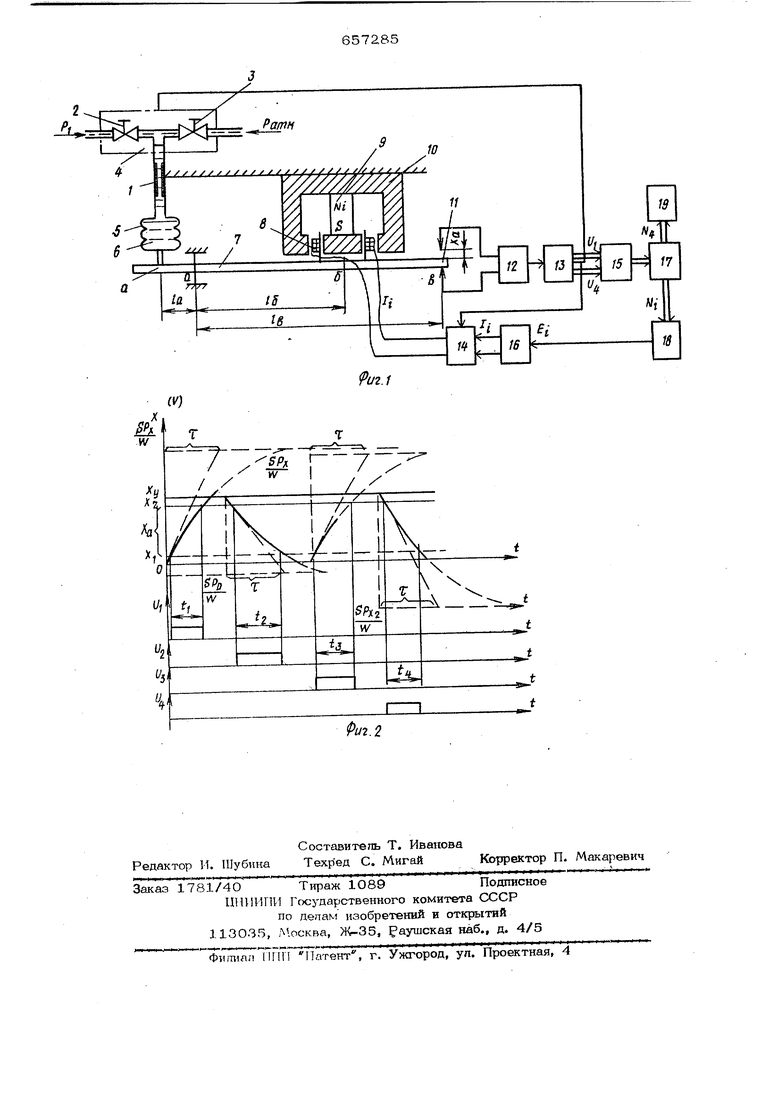
МЭП наряду с силовой катушкой имеет две катушки компенсации жесткости, установленные на краях рабочего зазора магнитной системы и включенные встречно в цепь стабилизатора тока последоваТ тьно с силовой катушкой. При двухтактном интегрировании давления осуще36сгвляется время-импульсное преобразование давления, а для получения цифрового отсчета в манометр введены такие узлы, как цифровой хронометр дая преобразования длительности выходных импульсов в код, преобразователь код-код для осуществления операций над кодами (деление кодов, умножение на масштабный коэффициент), отсчетное устройство. Введение катушек компенсации жесткости позволяет исключить лишь влияние жес ткости сильфона на линейности интегрирования давления, однако не снижает погрешности линейности, связанной с зависимостью постоянной интегрирования от измеряемого давления, в частности из-за наличия зависимости вязкости рабочей жидкости от давления. Кроме того, при больших перемещения катушек компенсации жесткости величина отрицательной жесткости не остается посстоянной, а поэтому не удается обеспечить полную компенсацию жесткости силь фона во всем его рабочем диапазоне и получить линейный интегратор. Кроме того, величина отрицательной жесткости, со даваемой катушками, сравнительно невели ка и приходится применять сильфон с малой жесткостью и рычаг с большим отношением плеч. Целью изобретения является повышени точности измерения давления.Указанная цель достигается тем, что манометр, содержаший сильфон, соединенный с источником давления через нерегулируемый дроссель, магнитоэлектрический преобразователь с подвижной силовой катушкой, включенной через коммутатор в цепь стаб1тизатора тока и соединенные последовательно датчик перемешения рычага со схемой управления коммутатором цифровой хронометр, преобразователь код-код и отсчетное устройство, снабжен преобразователем код-напряжение, вход которого соединен с преобразователем код-код, а вход - со стабилизатором тока, и клапанный распределительный блок, установленный перед нерегулируемым дросселем и подключенный к схеме управ ления коммутатором. Введение клапанного распределительного блока на входе манометра позволяет в режиме двухтактного интегрирования осуществить алгоритм коммутации давлений, при котором в случае выполнения условия равенства опорного давления измеряемому давлению независимо от значения жесткос ти полностью исключается погрешность ин 85 тегрирования одновременно от жесткости, и изменения вязкости жидкости с давлением. Для выполнения упомянутого условия, т.е. установления равенства давлений, введен преобразователь код-напряжение, выходное напряжение которого определяется кодом преобразователя код-код, полушемым последовательно на каждом шаге быстросходящего интеграционного процесса, и задает значение стабилизированного тока управляемого стабилизатора тока. На фиг. 1 показана схема предлагаемого манометра; на фиг. 2 -диаграмма его работы. Манометр состоит из нерегулируемого дросселя 1, который с одной стороны соединяется либо с источником давления через клапан 2, либо с атмосферой через клапан 3, распределительного блока 4, а с другой стороны - с сильфоном 5, внутренняя камера 6 которого заполнена рабочей жидкостью. Подвижное дно сильфона 5 жестко соединено с коротким плечом рычага 7 (точка о(). На длинном кон- це рычага (точка 6) установлен каркас с силовой катушкой 8 магнитоэлектрического преобразователя (МЭП), содержащего постоянный магнит 9 и магнитопровод Ю. На конце рычага установлены два контакта положения 11, включенные на вход датчика перемещения 12, соединенного, со схемой управления 13. Выходы схемы управления 13 соединены с коммутатором 14, клапанным распределительным блоком 4, а также с цифровым хронометром 15. Через коммутатор 14 в выходную цепь стабилизатора тока 16 включена силовая катушка 8 МЭП. Цифровой хронометр 15 подключен ко входу преобразователя кодкод 17, выходы которого с одной стороны соединены с преобразователем коднапряжение 18, связанным, со входом управляемого стабилизатора тока 16, а с другой стороны с цифровым отсчетным устройством 19. Манометр, работает следующим образом. В исходном состоянии клапан 2 распределительного блока 4 закрыт, а клапан 3 открыт Ко входу дросселя 1 с гидравлическим сопротивлением R. образующего вместе с емкостью С сильфонной камеры 6 гидравлический интегратор давления, приложено атмосферное давление. Отсчетное устройство 19 индицирует нуль, (вначале работы прибора) или предыдущее значение давления в паскалях и отключено от счетчика преобразователя код-код 17 В счетчике преобразовагеля код-код 17 исходно записан код, соогвегсгвуюший, на пример, половине верхнего предела измерения прибора. Этот код преобразован пре образователем код-напряжение, 18 в соответствующее напряжение. Установившее значение тока стабилизатора тока 16, с помощью магнитоэлектрического преобразователя преобразуется в образцовое давление, величина PC которого равна половине верхнего предела измерения прибора {PQ O,5f ). Коммутатор 14 сигналом со схемы управления 13 установлен в состояние, при котором катущка 8 МЭП ока зьшается обесточенной , при этом стабилизатор тока 16 работает на эквивалентную нагрузку (на фиг, 1 не показано). Гидравлическая емкость С считается -разреженной, дно сильфона 5 занимает крайнее верхнее положение, а точка 6 длинного плеча рычага замкнута с нижним контактом 11, Измерение давления Р отличается от метода двухтактного интегрирования введением дополнительных тактов интегрирозания и представляет собой быстро сходящийся интеграционный процесс, при котором результат измерения находится путем исследоватепьных приближений (фиг. 2 В первом такте в течение измерительного интервала времени интегрируется измеряемое давление Р.. до заданной перемещениями. Х и Х2 величины интеграла объема Vo , а во втором такте то же .значение интеграла (т.е. объем V, V ) описывается интегрированием образцового давления PQ в течение второго измерительного интервала t, . Временные интервалы t. и t2 цифровым хронометром 15 преобразуются в соответ ствующие коды N и N g , которые в преобразователе код-код 17 делятся и умно жаются на масщтабный коэффициент, а р&зультат преобразования (код М. Б-: записывается в счетчик преобразователя 17. Таким образом, после пвух тактов интегрирования получается значение давленияРх NX по формуле: Рхц,7 Полученнь1й результат РХ (код N/j} принимается за грубую опенку измеряемого давления Р- , процесс измерения продолжается и вводятся дополнительные такты интегрирования. Код N х преобразователем код-напряжение 18 преобразуется в напряжение U и управляет . током стабилизатора тока 16, устанавливая его значение IQ , которое развивает в. МЭП приведенное к сильфону давление Р , равное давлению , с погрешно- стью у, определяющейся нелинейностью интегрирующего устройства. Это новое значение Р образцового давления, близкое к измеряемому, интегрируется в третьем такте в течение измерительного интервала Ь до гон же величины интеграла V - V V и далее преобразователем код-код 17 вычисляется новое значение N получаемое из рравнения первого и третьего интегралов. Новое значение Р оказывается ближе к измеряемому Р , причем погрешность 2 снижается на каждом шаге примерно „а порядок и, кроме того, изменяет знак. Интегрируя несколько раз и вычисляя ±1--П - Т /7- Т 1 , можN- N.-1) но получить значение измеряемого давления Р практически с любой степенью точности. Цикл измерения начинается подачей импульса пуск со схемы управления 13, с приходом которого открывается клапан 2 и закрывается клапан 3. При этом вход дросселя 1 соединяется с источником давления, и через дроссель в сильфон жидкоокость перетекает под действием измеряемого давления РХ Сильфон растягивается, а его дно перемещается вдаз на рас- стояние Х. При этом, точка Ь длинного плеча рычага перемещается вверх на расГД&, Х задано стояние Хд - Е € расстоянием между контактами 11, На выходе дискриминатора перемещения 12, формируется импульс напряжения / длительностьюь , Конец импульса (.касание точки б рычага верхнеро контакта 11) означает конец первого такта интегрирования, и схема управления 13 закрывает клапан 2 и открывает клапан 3, а затем с некоторой задержкой (для установления нулевых начальных условий в каждом такте интегрирования) переключает коммутатор 14 в состояние, при котором выход стабушизатора тока подключается к силовой катушке 8 МЭП, При этом с табуизированный ток IQ проходит по силовой катушкп 8 и создает опорное усилие FO , где Lp- длина витков катушки 8, В этом случае в сильфонной камере с учетом плечей рычага t и tj создается образцовое А давление Р И через дроссель Эф ЕС, 3. осуществляется обратное перетекание жидкости под действием перепада давления PQ на его концах. Сипьфон еживверх на го мается, его дно перемешается же расстояние , а длинное плечо пере- на). мешается вниз выходе дискриминагора йёремещения форк руегся импульс U штигепьносгью Ip « jQaлee, при продолжении цикла измере ния в третьем и четвергом, тактах интегр рования клапан 3 остается открытым, клапан 2 закрытым, выход стабилизатора тока 16 подключенным к катушке 8 МЭП, В третьем такте по сигналу со Схемы управления коммутатор 14 переключается, изменяя направление тока стабилизатора 16 в китушке 8 так, что новое значение тока 1,. , установленное после вычисления Р- (кодаМ, ), соз7 /t, .Л дает усилие (давление Pij ) растягивающее сильфон, бьтов первом та те интегрирования. После окончания третьего такта в счетчике преобразователя код-код ааписьшается код. В четвергом такте сильфон вновь сжимается под действием образцового давления PXI ФоРмируется импупьс U Деятельностью i. цикл измерения заканчив аетоя, и устройство после подкгаочения выхода стабилиз тора тока 16 к эквивалентной нагрузке окааьшаегся в исходном состоянии, В кон це цикла измерения в счетчике преобразователя код-код записьюается код,который принимается за окончательный реауяьтаг измерения и индицируется цифровым огсчегным устройством 19. Быстрая сходимость интеграционного процесса не требует большого числа дополнительных шагов. Так, приведенная погрешность от жесткости сильфона уже при двух дополнительных тактах уменьши егся до величины порядка (0,,005) погрешность для текущего значений- Р схзгаегся того же порядка при условии X л А., 1но возрастает с уменьшением величины Р и нарушением данного соотношения. Величина погрешности в дополнительных тактах может быть снижена, гак как ог шага к шагу интеграционного процесса знак погрешности изменяется и два смежных приближенных значения будут пбследовагельно больше и меньше значения измеряемого давления. 6572 58 Данные о сходимости интеграционного процесса дая различных значений Х. У/, Р- , а также для различного выбора исходного образцового давления I РО- РХ были ПОПу° , . 2 О 5 ченьт расчетом на ЦВМ и согласуются с эксперименгальными данными, полученными При исследовании макета манометра. Сравнение интегралов давления, получаемых и отдельных гактах интегрирования, позволяет исключить погрешность от дрейфа нуля сильфона, и снизить погрешность, вызванную гистерезисом. Применение интеграционного метода измерения давления позволяег практически полностью исключить погрешность нелинейности интегрирующего устройства, роль которого выполняют нерегулируемый дроссель и сильфон, без введения дополнительных конструктивных элементов, усложняющих манометр, в частности, погрешность из-за наличия высокой жесткости сильфона, погрешность, вызванную зависимостью вязкости рабочей жидкости от давления, и по сравнению с прототипом 1повысить точность измерения давления, доведя ее до величины порядка 0,2%. Формула изобретения Манометр, содержащий сильфон, соединенный с источником давления через нерегулируемый дроссель, магнитоэлектрический преобразователь с, подвижной силовой катушкой, включенной через коммугатор в цепь стабилизатора гока и соединенные последовагельно дагчик перемещения рычага со схемой управления коммутатором, цифровой хронометр, преобразователь код-ход и отсчетное устройство, о т- личающийся тем, что, с целью повышения точности измерения, в него введены преобразователь код-напряжение, вход которого соединен с преобразователем , а выход - со стабилизатором тока, и клапанный распределительный блок, установленный перед нерегушфуемым дрось. селем в подключенный к схеме управления коммутатором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манометр | 1976 |
|
SU555304A1 |
| Способ определения частоты собственных колебаний весов с магнитоэлектрическим уравновешиванием | 1988 |
|
SU1642258A1 |
| Устройство для измерения давления | 1978 |
|
SU781637A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Цифровой компенсационный прибор для измерения обобщенной механической силы | 1983 |
|
SU1087783A1 |
| Многоканальный цифровой термометр | 1984 |
|
SU1234730A1 |
| Электронный сейсмометр | 1987 |
|
SU1518816A1 |
| Устройство для измерения температуры | 1984 |
|
SU1229600A1 |
| Цифровой измеритель температуры | 1987 |
|
SU1536220A1 |
| Цифровой измеритель температуры | 1988 |
|
SU1560987A1 |
X
W
L/
Ki
-4
W
it
«g д
М
7/X
/7 1
L.
-1
A
t
