Известны устройства для измерения эксцентриситета окружностей неподвижных изделий, содержащие четыре датчика, расположенные попарно по двум взаимно перпендикулярным диаметрам внутренней окружности.
Описываемое устройство характеризуется тем, что для быстродействия и высокой точности контроля входные цепи каждой из пар датчиков, например индуктивных, расположенных по одному диаметру, подключены к источнику питания так, что фазы напряжений в этих цепях сдвинуты относительно друг друга па 90°, выходные цепи этих пар датчиков включены встречно, а выходные цепи обеих пар датчиков включены последовательно, что обеспечивает векторное сложение электрических измерительных сигналов.
На фиг. 1 показана схема измерения эксцентриситета окружностей (внутренней и наружной) неподвижных изделий; на фиг. 2 - электрическая схема включения датчиков устройства.
Изделие / базируется относительно внутреннего отверстия 2 таким образом, чтобы центр 3 отверстия совпадал с точкой пересечения осей четырех индуктивных датчиков 4-7. Выходные цепи диаметрально противоположных датчиков 4 и 6 включены попарновстречно так, что их суммарное напряжение при одинаковых расстояниях измерительных
наконечников датчиков от центра 5 будет равно нулю. При неодинаковых положениях наконечников датчиков их суммарное напряжение будет равно векторной разности напря5 женйй в цепи каждого датчика.
Вторая пара датчиков 5 и 7, соединенная аналогично первой и также подключенная к генератору 8 с регулируемыми по фазе и амнлитуде выходами, питается сигналами,
0 напряжения которых сдвинуты но фазе относительно напряжений в первой паре датчиков на 90°. Выходные цепи обеих пар датчиков включены последовательно, что обеспечивает векторное сложение электрических изме5 рительных сигналов.
В результате, общий выходной сигнал всех четырех датчиков моделирует выражение:
:D (D,-D,r-{-(D,-D,)
0 где D - измерительный электрический сигнал на каждом датчике; I,D - суммарный сигнал, характеризующий наибольший эксцентриситет окружностей.
5 Выходной суммарный сигнал подается на общий усилитель 9.
подвижных изделии, содержащее четыре датчика, расположенные попарно по двум взаимно перпендикулярным диаметрам внутренней окрун ности, отличающееся тем, что, с целью достижения быстродействия и высокой точности контроля, входные цени каждой из пар датчиков, например индуктивных, расположенных по одному диаметру.
подключены к источнику питания так, что фазы напряжений в этих цепях сдвинуты относительно друг друга на 90°, выходные цепи этих пар датчиков включелы встречно, а выходные цепи обеих пар датчиков включены последовательно, что обеснечивает векторное сложение электрических измерительных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения частотыСиНуСОидАльНОгО НАпРяжЕНия | 1979 |
|
SU815666A1 |
| Управляемый измерительный генератор | 1983 |
|
SU1109851A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИ ПОМОЩИ ДИФФЕРЕНЦИАЛЬНОГО ДАТЧИКА | 2019 |
|
RU2717904C1 |
| Накладной вихретоковый преобразователь с вращающимся полем | 1986 |
|
SU1415166A1 |
| Проходной вихретоковый преобразователь с вращающимся полем (его варианты) | 1982 |
|
SU1027592A1 |
| Устройство слежения за стыком | 1986 |
|
SU1425009A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ | 1966 |
|
SU183138A1 |
| Способ настройки тока компенсации в электрических сетях и устройство для его осуществления | 1981 |
|
SU1030913A1 |
| Пятифазный кольцевой преобразователь напряжения | 1989 |
|
SU1693700A1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2086913C1 |
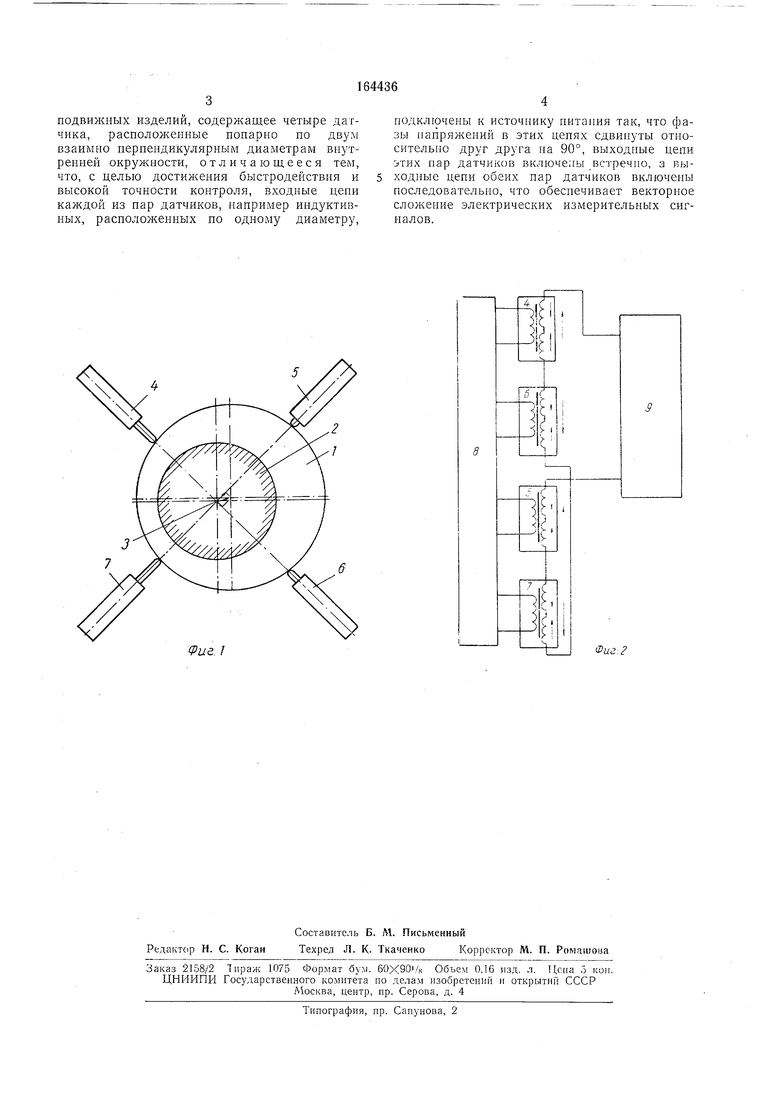
Фиг. 1
Фиг. г
