Изобретение относится к области измерительной техники, более конкретно, к области измерения различия физической величины при помощи электрического дифференциального датчика. Хорошо известны электрические дифференциальные датчики различных типов - резистивные, индуктивные, емкостные. Их принцип основан на том, что в датчике применяются, как минимум, два электрических преобразователя измеряемой величины. Эти преобразователи соединяют в общую схему датчика таким образом, что выходной сигнал датчика определяется разностью электрических параметров этих преобразователей, которую принято называть дисбалансом датчика. Таким образом, выходной сигнал датчика определяется разностью значений величины, воздействующей на каждый из преобразователей. Этот выходной сигнал часто называют дифференциальным, чтобы подчеркнуть способ его формирования.
Дифференциальные датчики применяются для тех измерений, в которых важно найти именно различие величины, а не ее абсолютное значение. Зачастую, абсолютное значение величины, одинаково действующее на преобразователи, имеет характер помехи, на фоне которой нужно выделить полезный сигнал, соответствующий разнице величины. Кроме того, дифференциальные датчики применяют для подавления внешних возмущающих факторов в виде электромагнитного поля, механических вибраций, либо изменений температуры, которые в равной степени воздействуют на преобразователи и поэтому не передаются в дифференциальный выходной сигнал датчика.
Дифференциальные электрические датчики применяются для измерения разницы пространственного положения, температуры, диэлектрической проницаемости, магнитной проницаемости и других величин. Косвенным образом, при помощи этих величин измеряют разницу толщины материала, концентрации определенного вещества, скорости потока газа и многих других факторов. В дифференциальных электрических датчиках применяют как постоянный, так и переменный ток. Датчики с емкостными и индуктивными преобразователями используют переменный ток, так как электрические эффекты от изменения емкости конденсаторов, индуктивности либо взаимной индукции катушек наблюдаются при воздействии на них переменного тока или напряжения. Дифференциальные датчики, как правило, используются для регистрации малого отклика преобразователей на разницу в измеряемой величине, на фоне большого выходного сигнала каждого из преобразователей. Специалистам в области измерительной техники известно, что применение дифференциальных датчиков позволяет точнее измерить разницу измеряемой величины, чем при проведении двух независимых измерении этой величины и получении искомой разницы за счет численного вычитания результатов. Это обусловлено тем, что относительные погрешности измерения большого выходного сигнала отдельного преобразователя приводят к большим абсолютным погрешностям, сопоставимым со значениями дифференциального сигнала. Конечно же, абсолютную точность двух независимых измерений можно повысить за счет более сложного измерительного устройства. Однако, при использовании сходных преобразователей, дифференциальный датчик оказывается более предпочтительным.
Датчики переменного тока можно разделить на, по меньшей мере, три класса. К первому классу относятся так называемые мостовые датчики. Схема мостового датчика питается от одного источника переменного напряжения либо тока, а выходной сигнал снимают между двумя точками в схеме. Пример мостового индуктивного датчика приведен в патенте США US 8026716 (опубл. 01.10.2009, МПК G01N 27/72). Схема мостового соединения построена таким образом, что, когда преобразователи имеют одинаковые электрические характеристики и дисбаланс датчика отсутствует, то выходной сигнал также отсутствует. Выходной сигнал появляется при возникновении дисбаланса, который, в свою очередь, обусловлен различиями в измеряемой величине, воздействующей на преобразователи.
Второй класс включает в себя датчики, которые тоже питаются от одного источника переменного напряжения либо тока, и в которых преобразователи электрически связаны таким образом, что обеспечивается вычитание их выходных сигналов на общем выходе датчика. К этому классу, преимущественно, относятся датчики с индуктивной связью между катушками преобразователей, поскольку полярность отклика такого преобразователя легко изменить на противоположную за счет изменения направления намотки его катушки. Преобразователи соединяют встречно-последовательно или встречно-параллельно, что обеспечивает вычитание непосредственно в проводниках, которыми выполнены катушки. Пример такого датчика со встречно-последовательным соединением приведен, например, в патенте США US 6995021 (опубл. 02.09.2004, МПК G01N 27/72).
Третий класс можно условно назвать классом датчиков с противофазным возбуждением. На такой датчик подают токи либо напряжения одинаковой частоты и амплитуды, но противоположные по фазе. Противофазные токи либо напряжения поступают на отдельные преобразователи, а выходные сигналы преобразователей суммируются в схеме их соединения. В результате суммирования формируется общий выходной сигнал датчика.
За счет противофазного соотношения между возбуждающими сигналами, фактически, на выходе датчика происходит взаимное вычитание выходных сигналов преобразователей. При воздействии на преобразователи измеряемой величины одного и того же значения, взаимное вычитание приводит к полной компенсации сигналов преобразователей, так что, выходной сигнал датчика отсутствует. Если измеряемые величины, воздействующие на каждый из преобразователей, имеют различие, то, при взаимном вычитании, сигналы преобразователей компенсируют друг друга не в полной мере, и на выходе датчика появляется сигнал, пропорциональный указанному различию. К этому классу, например, относится индуктивный дифференциальный датчик количества ферромагнитных частиц на листовом материале, описанный в патенте RU 2675405 (опубл. 19.12.2018, МПК G01D 5/12). В нем противофазные токи подаются в две возбуждающие катушки индуктивного датчика, а выходной сигнал снимается с приемной катушки, имеющей магнитную связь с обеими возбуждающими катушками. Магнитные частицы изменяют коэффициент связи между возбуждающей и одной из приемных катушек, что приводит к изменению выходного сигнала датчика. Выходной сигнал дифференциального датчика переменного тока возникает за счет вычитания (то есть, суммирования в противофазе) выходных сигналов преобразователей. В некоторых датчиках, для суммирования применяют электронные схемы, содержащие активные элементы, такие, как транзисторы или операционные усилители, а иногда выпрямители или генераторы импульсов. Электронная схема вносит собственные погрешности за счет свойственной ей асимметрии по входу, нелинейностей, ограничения динамического диапазона, частотных и фазовых искажений, а также наводок и шумов. Этого недостатка лишены датчики, в которых сигналы преобразователей суммируются пассивным образом в физической среде, которая обладает высокой линейностью, почти не вносит фазовых и частотных искажений, отличается малым уровнем шумов и отсутствием ограничения уровня. Такой средой может быть электрический проводник или же пространство внутри катушки. Пассивное суммирование (вычитание) используется в уже упомянутых датчиках: согласно патенту RU 2675405 суммирование магнитного потока происходит в приемной катушке, а согласно патенту США US 6995021 противофазное вычитание происходит в последовательном включении проводников катушек.
Во многих случаях, для повышения чувствительности датчиков стараются, насколько это возможно, повысить частоту возбуждающего напряжения или тока. Это связано с тем, что отклик выходного сигнала датчика на изменения индуктивности или емкости, в общем случае, растет с ростом частоты. Для наиболее высокочувствительных датчиков рабочая частота может превышать сто мегагерц. Еще одной причиной повышения частоты возбуждающего сигнала является стремление повысить быстродействие датчика.
Дифференциальные датчики широко используются для высокочувствительных измерений. Изменение емкости либо индуктивности, соответствующее полному диапазону чувствительности датчика, часто находится в пределах нескольких сотых долей от номинального значения емкости или индуктивности преобразователя. Обработка выходного сигнала такого датчика сопряжена с рядом проблем, среди которых главными являются подавление шумов и помех, и адекватная компенсация паразитного дисбаланса датчика. Высокой степени подавления шумов и помех обычно достигают за счет накопления измеренного сигнала на протяжении многих периодов колебаний возбуждающего сигнала. Чем выше частота, тем больше количество периодов, по которым можно накопить измеренный сигнал за заданное время.
Во многих случаях, процесс измерения представляет собой последовательность циклов измерения, в каждом из которых находят отдельное измеряемое значение. При измерении величины, изменяющейся во времени, последовательность циклов измерения позволяет построить зависимость измеряемой величины от времени. Если измеряемая величина является статичной, то усреднение результатов, полученных в нескольких циклах измерения, позволяет уменьшить вклад шумов в результат измерений. Так, при воздействии белого шума, его вклад в результат измерений падает пропорционально квадратному корню из числа измерений.
Явление паразитного дисбаланса хорошо известно для всех типов дифференциальных датчиков, и, обычно, связано с разницей электрических характеристик преобразователей при воздействии на них одного и того же значения измеряемой величины. Причиной паразитного дисбаланса, как правило, становится геометрическое различие между преобразователями в пределах конструктивного допуска их изготовления, либо же неточность монтажа преобразователя. Например, для емкостных датчиков, источником паразитного дисбаланса часто является небольшое различие в площади пластин измерительных конденсаторов, либо малый перекос этих пластин. Также, паразитный дисбаланс возникает из-за различий характеристик материалов, из которых изготовлены преобразователи, например, диэлектрической либо магнитной проницаемости.
Возникновение дисбаланса является принципом работы дифференциального датчика, и, само по себе, не несет вреда. В подавляющем числе случаев использования дифференциального датчика, с технической точки зрения, необходимо в итоге получить дисбаланс, соответствующий скалярной разности амплитуд выходного сигнала преобразователей. В данном описании, мы будем говорить о полезном дисбалансе, когда речь идет о реакции дифференциального датчика на измеряемую величину. Полезный дисбаланс противопоставляется паразитному дисбалансу, который добавляется к полезному дисбалансу и ухудшает точность работы датчика.
Для борьбы с паразитным дисбалансом, перед проведением измерения, когда на преобразователи действует одинаковое значение измеряемой величины или же измеряемая величина отсутствует, проводят так называемую балансировку датчика. Для этого, регистрируют выходной сигнал датчика и далее вычитают его из получаемого результата измерений. Либо же, перед измерением оперативно изменяют параметры элементов датчика или схемы его включения, чтобы, за счет намеренного введения небольшой асимметрии, скомпенсировать паразитный дисбаланс.
Однако, в случае дифференциального датчика, возбуждаемого высокочастотным напряжением либо током, борьба с паразитным дисбалансом усложняется. Это связано с тем, что между противофазными возбуждающими сигналами, поступающими на преобразователи, разница фаз, как правило, не равна в точности 180 градусам. Это происходит из-за неидеальности конструкции датчика, например, из-за различной длины подводящих проводников и различных сдвигов фаз в цепях, по которым передаются возбуждающие сигналы. Кроме того, сами преобразователи могут иметь немного отличающиеся фазовые характеристики, что приводит к отличию фазы от 180 градусов при суммировании выходных сигналов. Все эти эффекты практически незаметны при невысоких частотах возбуждения. Однако, на высоких частотах возбуждения, начиная с примерно 1 МГц и выше, фазовые соотношения становятся значимыми для точности работы датчика. При частоте около 100 МГц, как показывает практический опыт, сдвиг фаз между выходными сигналами преобразователя может достигать 20 градусов даже при принятии специальных конструктивных мер по снижению различия фазы. В результате сочетания перечисленных случайных факторов, выходной сигнал, обусловленный паразитным дисбалансом, может иметь произвольный сдвиг фазы по отношению к сигналу возбуждения. Чтобы скомпенсировать его методом вычитания сигнала, соответствующего паразитному дисбалансу, из сигнала, получаемого во время измерений, следует применять не скалярное, а векторное вычитание.
Описанный механизм возникновения паразитного дисбаланса показан на Фиг. 1, где приведены векторные диаграммы формирования дифференциального выходного сигнала датчика. Векторные диаграммы позволяют наглядно представить формирование выходного сигнала датчика в виде векторной суммы возбуждающих сигналов, прошедших через преобразователи и, при этом, определенным образом изменивших свою амплитуду и фазу. Для определенности, в данном описании мы будем применять понятие величины дисбаланса только к скалярным значениям. Чтобы описать векторную величину, возникающую в результате явления дисбаланса, будет применяться термин «вектор рассогласования». Укажем здесь, что конечной целью измерений при помощи дифференциального датчика всегда является скалярная величина дисбаланса, за исключением редкого специального случая измерения комплексной проницаемости диэлектрика или магнитного материала. Вектор рассогласования, как правило, имеет ценность только для промежуточных вычислений. Далее будет показано, что, для высокочастотных датчиков, дисбаланс нельзя считать равным модулю вектора рассогласования.
Во многих случаях, выходной сигнал преобразователей датчика дополнительно подвергается фильтрации и усилению, так что схема обработки переменного сигнала является неотъемлемой частью датчика. Тогда, дисбаланс и вектора выходных сигналов должны учитывать изменения амплитуды и фазы, вносимые названной схемой обработки.
Чувствительность датчика можно выразить как отношение полезного дисбаланса к измеряемой величине или к измеряемому перепаду величины.
На Фиг. 1а и Фиг. lb, вектор  соответствует выходному сигналу первого преобразователя в отсутствии измеряемой величины, а вектор
соответствует выходному сигналу первого преобразователя в отсутствии измеряемой величины, а вектор  представляет собой сигнал второго преобразователя. Вектор
представляет собой сигнал второго преобразователя. Вектор  соответствует сигналу первого преобразователя при появлении измеряемой величины. В отсутствие измеряемой величины выходной сигнал датчика соответствует вектору паразитного рассогласования
соответствует сигналу первого преобразователя при появлении измеряемой величины. В отсутствие измеряемой величины выходной сигнал датчика соответствует вектору паразитного рассогласования  Выходной сигнал датчика при появлении измеряемой величины соответствует вектору
Выходной сигнал датчика при появлении измеряемой величины соответствует вектору  Полезный сигнал датчика
Полезный сигнал датчика  нельзя измерить непосредственно, но он получается вычитанием из выходного сигнала вектора паразитного рассогласования:
нельзя измерить непосредственно, но он получается вычитанием из выходного сигнала вектора паразитного рассогласования: 
На Фиг. 1а изображен вырожденный случай, характерный для невысокой частоты возбуждения, при которой фазовыми сдвигами можно пренебречь. За счет этого, все вектора являются коллинеарными, и можно ограничиться скалярным решением задачи, без привлечения векторов. Скалярное значение дисбаланса в отсутствии измеряемой величины вычисляется как  и является паразитным, а при измерении он равен
и является паразитным, а при измерении он равен  и является скалярной суммой паразитного дисбаланса и полезного скалярного значения дисбаланса, вызванного измеряемой величиной. Тогда, полезный дисбаланс легко получить как скалярную разность модуля вектора выходного сигнала датчика в момент измерения и модуля вектора паразитного рассогласования:
и является скалярной суммой паразитного дисбаланса и полезного скалярного значения дисбаланса, вызванного измеряемой величиной. Тогда, полезный дисбаланс легко получить как скалярную разность модуля вектора выходного сигнала датчика в момент измерения и модуля вектора паразитного рассогласования:  Такой подход к компенсации паразитного дисбаланса наиболее широко применяется на практике. Однако, если вектора не коллинеарны, подобное упрощение недопустимо.
Такой подход к компенсации паразитного дисбаланса наиболее широко применяется на практике. Однако, если вектора не коллинеарны, подобное упрощение недопустимо.
При повышении частоты в датчике возникают существенные фазовые сдвиги между выходными сигналами преобразователей, которые невозможно игнорировать. Поэтому, задачу следует решать в векторном виде. Этот случай показан на Фиг. lb. Выходной вектор датчика можно разложить на ортогональные компоненты, один из которых можно условно называть значимым, а другой - незначимым. Например, выходной вектор  в отсутствие измеряемой величины можно представить суммой
в отсутствие измеряемой величины можно представить суммой  , где
, где  является значимым компонентом, а
является значимым компонентом, а  является незначимым. Значимый компонент направлен по биссектрисе
является незначимым. Значимый компонент направлен по биссектрисе  угла
угла  между векторами выходных сигналов преобразователей и образует с ними малый угол. Поэтому, значимый компонент практически равен по величине скалярному значению дисбаланса. Незначимый компонент почти ортогонален векторам выходных сигналов преобразователей и практически не изменяется при изменении дисбаланса.
между векторами выходных сигналов преобразователей и образует с ними малый угол. Поэтому, значимый компонент практически равен по величине скалярному значению дисбаланса. Незначимый компонент почти ортогонален векторам выходных сигналов преобразователей и практически не изменяется при изменении дисбаланса.
Отметим, что, казалось бы, небольшой сдвиг фаз между выходными сигналами преобразователя, не превышающий 20 градусов, может привести к тому, что незначимый компонент  значительно превысит по модулю значимый компонент
значительно превысит по модулю значимый компонент  Наличие угла α≤20° между сигналами отдельных преобразователей
Наличие угла α≤20° между сигналами отдельных преобразователей  дает незначимый компонент
дает незначимый компонент 
Амплитуда сигнала каждого преобразователя в дифференциальном датчике во много раз превышает разность амплитуд преобразователей, что определяет типовое соотношение  несмотря на достаточно малую величину sinα≤0,35.
несмотря на достаточно малую величину sinα≤0,35.
Из приведенного объяснения становится понятным, что, при повышении частоты, модуль выходного сигнала датчика, сам по себе, не следует использовать для получения скалярной величины дисбаланса, так как основной вклад в него обычно вносит незначимый компонент. Отделить значимый компонент от незначимого возможно только за счет фазочувствительного детектирования выходного сигнала датчика, что реализовано в уже упомянутых патентах US 6995021, US 8026716 и RU 2675405.
В уровне техники, устранение паразитного дисбаланса при работе на высокой частоте иногда реализуют вычитанием в векторном виде для получения вектора полезного сигнала:  Вслед за этим, из вектора полезного сигнала извлекают значимый компонент
Вслед за этим, из вектора полезного сигнала извлекают значимый компонент  Например, в упомянутом выше патенте США US 8026716 описан дифференциальный индуктивный датчик для измерения малых концентраций вещества, обладающего магнитными свойствами. В этом датчике, с целью компенсации паразитного дисбаланса, синтезируют компенсирующий сигнал, равный по модулю и в точности противонаправленный сигналу паразитного рассогласования, и вводят его в схему моста для суммирования с выходным сигналом. В результате аналогового вычитания переменных сигналов, эквивалентного векторному вычитанию, выходной сигнал датчика представляет собой чистый полезный сигнал. Этот сигнал подвергают синхронному детектированию и, в результате, получают постоянное напряжение, которое соответствует значимому компоненту. Постоянное напряжение соответствует скалярному значению дисбаланса моста с устраненным паразитным дисбалансом.
Например, в упомянутом выше патенте США US 8026716 описан дифференциальный индуктивный датчик для измерения малых концентраций вещества, обладающего магнитными свойствами. В этом датчике, с целью компенсации паразитного дисбаланса, синтезируют компенсирующий сигнал, равный по модулю и в точности противонаправленный сигналу паразитного рассогласования, и вводят его в схему моста для суммирования с выходным сигналом. В результате аналогового вычитания переменных сигналов, эквивалентного векторному вычитанию, выходной сигнал датчика представляет собой чистый полезный сигнал. Этот сигнал подвергают синхронному детектированию и, в результате, получают постоянное напряжение, которое соответствует значимому компоненту. Постоянное напряжение соответствует скалярному значению дисбаланса моста с устраненным паразитным дисбалансом.
Паразитный дисбаланс можно устранить и иным способом, извлекая значимые компоненты  и, затем, вычитая их друг из друга, как скалярные величины. Так, в патенте RU 2483276 (опубл. 27.05.2013, МПК G01B 7/06) описан емкостной дифференциальный датчик для измерения различия в толщине листового материала, возбуждаемый противофазными напряжениями высокой частоты. Выходной сигнал с датчика усиливается и подается на синхронный детектор. Применение синхронного детектора позволяет сразу же выделить компонент вектора выходного сигнала, имеющий заданное направление. Результатом измерения является скалярная величина дисбаланса, получаемая после оцифровки выходного сигнала синхронного детектора. В этом решении запоминают паразитный дисбаланс, полученный перед проведением измерений, и скалярным образом вычитают его из дисбаланса, полученного при проведении измерений.
и, затем, вычитая их друг из друга, как скалярные величины. Так, в патенте RU 2483276 (опубл. 27.05.2013, МПК G01B 7/06) описан емкостной дифференциальный датчик для измерения различия в толщине листового материала, возбуждаемый противофазными напряжениями высокой частоты. Выходной сигнал с датчика усиливается и подается на синхронный детектор. Применение синхронного детектора позволяет сразу же выделить компонент вектора выходного сигнала, имеющий заданное направление. Результатом измерения является скалярная величина дисбаланса, получаемая после оцифровки выходного сигнала синхронного детектора. В этом решении запоминают паразитный дисбаланс, полученный перед проведением измерений, и скалярным образом вычитают его из дисбаланса, полученного при проведении измерений.
В обоих описанных здесь решениях точность измерения зависит от того, до какой степени направление, в котором извлекают значимый компонент выходного сигнала датчика, соответствует реальному направлению значимого компонента. Существенное различие между этими направлениями приводит к уменьшению чувствительности датчика, так как только часть его выходного напряжения используется при измерениях. Реальное направление значимого компонента не может быть получено из выходного сигнала сбалансированного датчика. Поэтому, его определяют при изготовлении устройства при помощи настройки или предварительного замера набега фазы в схеме измерения. Кроме того, в этих решениях полагаются на неизменность чувствительности преобразователей к измеряемой величине в течение времени.
Используемые в указанных патентах решения, обычно, оказываются эффективными, если на датчик не действуют возмущающие факторы, которые приводят к синхронному изменению отклика преобразователей. Примером подобных факторов можно назвать вибрацию, которая приводит к одинаковому изменению расстояния между обкладками измерительных конденсаторов емкостного дифференциального датчика, что вызывает синхронное изменение емкости конденсаторов. В индуктивных дифференциальных датчиках, вибрация какого-либо ферромагнитного элемента конструкции устройства, находящегося в дальней зоне области чувствительности датчика, также приводит к синхронному изменению индуктивности преобразователей. Нестабильность напряжения питания датчика является еще одним типом возмущающего фактора, синхронно влияющего на оба преобразователя. Для дифференциальных датчиков, используемых для контроля перепада тех или иных свойств материала, балансировка производится в отсутствие материала, а измерение выполняется после введения материала в датчик. Введение материала в датчик приводит к синхронному изменению отклика преобразователей. Например, при введении однородного листового материала в зазор емкостного датчика, синхронно возрастает емкость измерительных конденсаторов. Если конструкция датчика предполагает его разделение на части и обратное сочленение для загрузки измеряемого материала или для технического обслуживания, то после такой операции характеристики преобразователей датчика несколько изменяются, обычно, в равной степени.
Параметры индуктивных и емкостных преобразователей, таких, как индуктивность, коэффициент индуктивной связи, емкость или протекающий ток, являются дифференцируемыми функциями многих независимых переменных, представляющих собой как измеряемую величину, так и возмущающие воздействия. Так, например, емкость измерительного конденсатора пропорциональна площади его обкладок и диэлектрической проницаемости материала между обкладками, и обратно пропорциональна расстоянию между обкладками. Ток через конденсатор, аналогичным образом, зависит от этих же переменных, и, дополнительно, пропорционален амплитуде и частоте приложенного напряжения. То есть, параметр преобразователя, например, протекающий через него ток, можно приближенно представить через некоторое начальное значение и сумму изменяющихся компонентов, пропорциональных изменению Δ каждой отдельной переменной Xi: I≈I0(1+∑siΔXi). Для малых изменений ΔXi это линейное выражение можно считать практически точным. Коэффициент зависимости si от изменения определенной переменной можно выразить через значения частной производной параметра преобразователя по этой переменной Xi:  В силу конструктивной идентичности преобразователей наборы их коэффициентов зависимости si тоже можно считать идентичными.
В силу конструктивной идентичности преобразователей наборы их коэффициентов зависимости si тоже можно считать идентичными.
Влияние одинакового возмущающего фактора Xi на оба преобразователя приводит к масштабированию вектора выходного сигнала каждого преобразователя в соответствии с коэффициентом зависимости si от этого фактора. То есть, фактически, масштабируется вся векторная диаграмма. В результате такого влияния, явление паразитного дисбаланса во время измерения не удается подавить при помощи вычитания заранее измеренного начального значения, ни в скалярной, ни в векторной форме, поскольку сам вектор паразитного рассогласования тоже масштабируется. На Фиг. 1с показана векторная диаграмма, в которой выходные сигналы датчиков, перед проведением измерений, в отсутствие измеряемой величины, также соответствуют векторам  Вектор паразитного рассогласования, который запоминается на этой стадии измерений, равен
Вектор паразитного рассогласования, который запоминается на этой стадии измерений, равен  К моменту начала измерений эти вектора пропорционально увеличиваются под воздействием возмущающего фактора и превращаются в вектора
К моменту начала измерений эти вектора пропорционально увеличиваются под воздействием возмущающего фактора и превращаются в вектора  а соответствующий вектор паразитного рассогласования превращается в
а соответствующий вектор паразитного рассогласования превращается в  При попытке получить полезный сигнал вычитанием ранее запомненного паразитного рассогласования возникает неверный результат:
При попытке получить полезный сигнал вычитанием ранее запомненного паразитного рассогласования возникает неверный результат:  На самом деле, верным является выражение
На самом деле, верным является выражение  но действующее в момент измерения значение паразитного рассогласования
но действующее в момент измерения значение паразитного рассогласования  недоступно для его использования в вычислениях. Отсюда возникает погрешность нахождения выходного сигнала, которая выражается вектором изменения паразитного рассогласования
недоступно для его использования в вычислениях. Отсюда возникает погрешность нахождения выходного сигнала, которая выражается вектором изменения паразитного рассогласования  Длина этого вектора часто превосходит длину вектора полезного сигнала
Длина этого вектора часто превосходит длину вектора полезного сигнала 
В наиболее сложных случаях, возмущающий фактор также влияет и на фазу выходных сигналов, как показано на Фиг. 1d. Такое поведение характерно для датчиков, в которых, для борьбы с наведенными помехами, выход датчика соединяется с частотно-избирательной резонансной цепью, например, с LC-контуром. Подобное решение применяется, например, в патенте RU 2483276. Емкости и/или индуктивности преобразователей в такой схеме включаются в состав LC-контура. Когда внешний возмущающий фактор приводит к изменению емкости и/или индуктивности преобразователя, резонансная частота контура сдвигается от первоначального значения. Если контур обладает высокой добротностью, то, даже небольшой сдвиг резонансной частоты приводит к существенному повороту фазы выходного сигнала. Этот поворот касается всех составляющих, и изменяет как направление сигнала паразитного рассогласования, так и полезного сигнала. Аналогичный эффект возникает, когда специально созданная резонансная LC-цепь отсутствует, но резонансный контур формируют паразитные емкости и индуктивности в самом датчике. Такой эффект описан, например, в патенте US 8026716.
Из сказанного видно, что вектор паразитного рассогласования может изменяться за время между балансировкой и измерениями не только по длине, но также и по направлению. Вместе с паразитным рассогласованием также изменяется и направление полезного сигнала. Поскольку как паразитное рассогласование, так и направление полезного сигнала, на момент проведения измерений, оказываются скрытыми параметрами, то точная реконструкция скалярной величины полезного дисбаланса не представляется возможной.
Еще одна сложность при использовании датчиков, описанных в RU 2483276 и US 8026716, для измерения малой разницы величин, связана с воздействием шумов и помех. Во многих случаях применения емкостного либо индуктивного датчика, электромагнитная обстановка в месте его установки приводит к возникновению помех на выходе, которые вносят значительную погрешность измерения. Вектор случайной помехи не имеет выделенного направления. Как известно из теории электрических измерений, при выделении компонента вектора случайной помехи, соответствующего заданному направлению, результат не зависит от этого направления. Если направление значимого компонента выходного сигнала на момент проведения измерения неизвестно или известно лишь приблизительно, то это может уменьшить получаемый полезный сигнал, при том, что уровень шума от направления не зависит. То есть, отсутствие точной информации о направлении значимого компонента способно существенно снизить соотношение сигнал/шум в сравнении с наилучшим возможным.
Как следует из приведенных рассуждений, для выделения, с наименьшими погрешностями, значимого компонента выходного сигнала датчика, соответствующего измеряемой величине, необходимо получить дополнительные данные. А именно, на момент проведения измерения, необходимо знать как направление значимого компонента, так и коэффициент передачи датчика. Эти данные требуются для учета синхронного изменения отклика преобразователей датчика и изменения направления значимого компонента выходного сигнала датчика, которые происходят под влиянием внешних возмущающих факторов. Под коэффициентом передачи понимается чисто электрическая характеристика, связывающая величины входного и выходного сигнала. Применительно к датчику, она связывает величины сигнала возбуждения и выходного сигнала.
Патент RU 2483276 был выбран в качестве прототипа заявленного изобретения. Названный патент описывает многоэлементный дифференциальный датчик, который содержит множество измерительных конденсаторов, объединенных общей обкладкой, которая используется как выход датчика. Процесс измерения включает в себя последовательный перебор нескольких режимов измерения, каждый из которых задействует только часть измерительных конденсаторов. Это дает возможность измерить различия в толщине для той области листа, в которой находятся задействованные измерительные конденсаторы. Перебор режимов позволяет промерить все области в зоне чувствительности датчика. В целом, многоэлементные дифференциальные датчики позволяют одновременно вести измерение различий величины в нескольких местах или же по нескольким каналам. Они являются более простой альтернативой применению множества обычных дифференциальных датчиков.
Недостатком прототипа является то, что он не позволяет, по ходу измерений, получать актуальную информацию о направлении значимого компонента выходного сигнала датчика и о коэффициенте передачи датчика. Без названной информации не удается достоверно измерить амплитуду полезного сигнала и скомпенсировать паразитный дисбаланс. Это приводит к плохо устранимым погрешностям измерения при воздействии такого возмущающего фактора, как вибрация пластин измерительных конденсаторов. Однако, даже в отсутствие вибрации, разброс фазовых характеристик датчика и элементов схемы приводит к тому, что реальное направление значимого компонента выходного сигнала существенно отличается от расчетного, в результате чего чувствительность датчика оказывается ниже расчетной. По той же причине, в прототипе соотношение сигнал-шум оказывается существенно ниже теоретически возможного.
Прототип предъявляет высокие требования к заводской настройке элементов схемы, так как эта настройка позволяет скорректировать расчетное направление регистрации значимого компонента, и приблизить его к реальному направлению значимого компонента. Неточности при регулировке существенно снижают чувствительность и соотношение сигнал/шум.
Еще один недостаток связан с тем, что, для каждого отдельного режима, истинное направление значимого компонента оказывается индивидуальным в связи с различным набегом фазы в цепи каждого из измерительных конденсаторов. Устройство не предполагает возможности оперативно изменять направление регистрации значимого компонента при переходе от одного режима к другому. Это приводит к большому разбросу чувствительности и соотношения сигнал/шум между различными режимами.
В уровне техники известны решения, в которых в качестве дополнительных данных используют так называемый синфазный выходной сигнал, формируемый вместе с обычным дифференциальным выходным сигналом дифференциального датчика. Синфазный сигнал, в отличие от дифференциального, представляет собой не разность, а сумму откликов преобразователей дифференциального датчика. Так, в патенте RU2289789 (опубл. 20.12.2006, МПК G01C 19/5712), дифференциальный сигнал детектируют синхронным детектором, а синфазный сигнал пропускают через амплитудный детектор. Значение выпрямленного синфазного сигнала используют для нормировки выходного сигнала синхронного детектора. Таким образом, удается компенсировать влияние возмущающих факторов на амплитуду выходного дифференциального сигнала, но влияние этих факторов на фазу выходных сигналов преобразователей не компенсируется и продолжает быть источником погрешностей. В патенте RU 2514158 (опубл. 27.04.2014, МПК G01B 7/00) дифференциальный сигнал получают взаимным вычитанием выпрямленных сигналов от двух преобразователей, а синфазный сигнал получается их сложением. Далее, синфазный сигнал используется для коррекции уровня дифференциального сигнала. Этому решению также свойственно игнорирование влияния возмущающих факторов на фазу выходных сигналов преобразователей. В обоих указанных патентах речь идет о невысоких частотах, на которых фазовые эффекты достаточно малы и создают малые погрешности. При повышении частоты подобные технические решения перестают быть эффективными.
Еще одной важной особенностью решений согласно патентам RU 2289789 и RU 2514158 является то, что дифференциальный и синфазный сигналы в них получают за счет обработки отдельных сигналов преобразователей в электронной схеме с активными элементами. Такая электронная схема, как уже указывалось, вносит многочисленные собственные погрешности. Подобных погрешностей лишены датчики с пассивным суммированием, примеры которых были приведены ранее. Еще один пример приведен в прототипе, где ток измерительных конденсаторов пассивным образом суммируется в приемной пластине, общей для всех емкостных преобразователей. Обратной стороной пассивного суммирования является невозможность, без дополнительных усилий, получать синфазный сигнал одновременно с дифференциальным.
В уже упомянутом патенте RU 2675405 используется пассивное суммирование и особый способ фазочувствительного детектирования. В нем применяется простой амплитудный детектор, но датчик намеренно настраивается с большим значением паразитного дисбаланса. За счет этого, выходное напряжение датчика представляет собой сумму дифференциального сигнала и более мощного сигнала возбуждения, прошедшего через один из преобразователей. Этот сигнал возбуждения, прошедший через один из преобразователей, за счет значительной амплитуды синхронизирует переключение диода в амплитудном детекторе, так что для дифференциального сигнала, фактически, обеспечивается синхронное детектирование. Из выходного тока амплитудного детектора вычитается постоянная часть, связанная с мощным синхронизирующим сигналом, а остаток тока представляет собой синхронно выпрямленный дифференциальный сигнал. Это решение обеспечивает прохождение дифференциального сигнала и синхронизирующего сигнала по одному и тому же тракту преобразования, за счет чего компенсируются изменения набега фазы. Полученный выпрямленный дифференциальный сигнал представляет собой значимую часть вектора рассогласования датчика. Однако, в таком решении нельзя измерить и учесть изменение коэффициента передачи, что не позволяет компенсировать связанные с этим изменения чувствительности датчика за счет внешних возмущающих факторов.
Техническим результатом заявленного изобретения является снижение погрешности измерения полезного сигнала дисбаланса дифференциального датчика, предназначенного для возбуждения противофазными сигналами высокой частоты. Дополнительным техническим результатом является уменьшение погрешности измерения, возникающей из-за разброса параметров элементов датчика и схемы его включения. Эти результаты достигаются за счет того, что в способе измерения при помощи дифференциального датчика, предназначенного для возбуждения противофазными сигналами высокой частоты, дифференциальный датчик содержит, по меньшей мере, два преобразователя, которые связаны с общим выходом датчика, и выполнены с возможностью подачи на них сигналов возбуждения; для выпрямления выходного сигнала датчика используют синхронный детектор, синхронизированный с сигналом возбуждения и выполненный с возможностью формирования пары квадратурных сигналов, где для проведения цикла измерения на датчик подают одновременно первый и второй сигнал возбуждения, являющиеся противофазными, и с помощью устройства регистрации на выходе регистрируют значения первой пары квадратурных сигналов, затем, отключают подачу первого сигнала возбуждения при сохранении подачи второго сигнала возбуждения, и регистрируют на выходе значения второй пары квадратурных сигналов, после чего, на основе полученных значений первой пары, находят скалярное значение дисбаланса датчика, соответствующее измеряемой величине, а значения второй пары используют для компенсации погрешностей нахождения скалярного значения дисбаланса датчика, причем проводят цикл измерения, по меньшей мере, один раз.
Дифференциальный выходной сигнал, получаемый в результате измерения, регистрируется в виде первой пары квадратурных сигналов. В целом, применение квадратурных сигналов позволяет использовать векторные вычисления при обработке сигналов датчика.
Получение дополнительных данных в заявленном изобретении реализовано за счет отключения подачи одного из противофазных сигналов возбуждения, что достаточно просто реализовать на практике, например, за счет блокировки формирователя соответствующего сигнала возбуждения. В отсутствие первого из сигналов возбуждения, на вход синхронного детектора будет проходить второй сигнал возбуждения, с учетом полного фазового сдвига и коэффициента передачи на всем пути от генератора сигнала. Он будет регистрироваться в виде второй пары квадратурных сигналов.
Конечной целью измерения является получение скалярного значения дисбаланса датчика. Выходной сигнал датчика формируется как векторная сумма выходных сигналов преобразователей датчика. Первая пара значений квадратурных сигналов представляет собой координаты вектора сигнала рассогласования датчика с учетом дополнительного усиления и сдвига фазы на пути от выхода датчика до входа синхронного детектора. Этот вектор состоит из значимого компонента и незначимого компонента.
Измерения проводятся в виде одного, либо многих циклов. Применение множества циклов измерения позволяет построить временную зависимость измеряемой величины, либо уменьшить вклад шума в результат измерения за счет усреднения результатов, полученных в отдельных циклах. В случае использования многоэлементного датчика, содержащего более чем два преобразователя, несколько циклов измерения могут быть использованы для получения нескольких результатов измерения с подачей возбуждающих сигналов, в каждом цикле, только на часть преобразователей датчика.
Вторая пара значений квадратурных сигналов представляет собой координаты вектора выходного сигнала одного преобразователя датчика с учетом дополнительного усиления и сдвига фазы на пути от выхода датчика до входа синхронного детектора. В заявленном изобретении эта пара значений имеет двойную функцию. Во-первых, она позволяет, в реальном времени, указывать направление для выделения значимого компонента вектора рассогласования датчика, так как это направление образует малый угол с вектором выходного сигнала одного преобразователя датчика. Малая погрешность направления обеспечивает близкие к максимально возможным значения чувствительности датчика и соотношения сигнал/шум. Во-вторых, вторая пара значений позволяет оперативно измерить коэффициент передачи сигнала на том же самом пути от генератора до входа синхронного детектора, по которому проходит дифференциальный выходной сигнал рассогласования датчика. Это позволяет, в реальном времени, вносить поправку в величину измеренного скалярного значения дисбаланса датчика для компенсации изменения указанного коэффициента передачи с течением времени. Изменение коэффициента передачи за счет возмущающих факторов, без проведения компенсации, влияет на чувствительность датчика к измеряемой величине. То есть, регистрация значений второй пары позволяет выделить из значений первой пары значимый компонент с малыми погрешностями по направлению его выделения, и скомпенсировать погрешности его длины, чтобы избежать влияния разброса параметров элементов, неточности заводской настройки и возмущающих воздействий. Это приводит к повышению точности измерения, обеспечивая достижение как основного, так и дополнительного технического результата.
Важно отметить, что вторая пара квадратурных сигналов имеет большие абсолютные значения, в сравнении с небольшим по величине дифференциальным сигналом, получаемым из первой пары квадратурных сигналов. Это связано с самим принципом дифференциального датчика, который измеряет слабый уровень различия между выходными сигналами преобразователей на фоне высокого уровня сигнала отдельного преобразователя. Поэтому, значения второй пары почти не подвержены действию шумов и помех, и могут быть зарегистрированы с высокой точностью. Эта особенность вносит дополнительный вклад в снижение погрешности заявленного способа.
Направление значимого компонента вектора разбаланса датчика, в заявленном изобретении, приближенно определяется при помощи направления вектора сигнала одного из преобразователей, соответствующего второй паре квадратурных сигналов. Такое приближение является правомерным, поскольку угол между векторами сигналов первого и второго преобразователя, в реальных конструкциях, невелик и не превышает 20 градусов. Соответственно, угловая ошибка приближения составляет менее 20 градусов.
Векторный анализ предполагает общеизвестные методы нахождения длины некоторого компонента вектора, когда известно направление этого компонента. В одном из этих методов, вычисляется проекция вектора на известное направление. В другом методе, вычисляется скалярное произведение вектора и единичного вектора, направленного в известном направлении. Во всех этих методах результат определяется косинусом угла между вектором и известным направлением его компонента. Если направление определено неточно, то возникающая за счет этого погрешность пропорциональна 1 - cosδ, где δ - угловая погрешность определения направления. Фактически, речь идет о половине угла, образованного векторами выходных сигналов отдельных преобразователей, так как значимый компонент направлен по биссектрисе этого угла. Таким образом,  Косинус угла ошибки определения направления, меньшего 10 градусов, весьма близок к единице, что соответствует небольшой погрешности измерения амплитуды полезного сигнала, не превышающей 0,015.
Косинус угла ошибки определения направления, меньшего 10 градусов, весьма близок к единице, что соответствует небольшой погрешности измерения амплитуды полезного сигнала, не превышающей 0,015.
В дальнейшем, мы будем называть выходным вектор, сформированный на основе значений первой пары квадратурных сигналов. Вектором чувствительности мы будем называть вектор, отражающий направление вектора полезного сигнала, и чувствительность преобразователей датчика. Например, вектор, сформированный на основе значений второй пары, является вектором чувствительности. Его направление почти совпадает с направлением значимой компоненты выходного вектора, а его модуль тем больше, чем выше чувствительность преобразователей. Для нахождения дисбаланса датчика находят длину проекции выходного вектора на направление вектора чувствительности. Такая проекция исключает из рассмотрения незначимый компонент, перпендикулярный вектору чувствительности, который не несет полезной информации о дисбалансе. Дисбаланс, полученный в результате проекции, в общем случае, есть сумма значимых компонентов паразитного дисбаланса и полезного дисбаланса.
Длину вектора чувствительности используют для компенсации изменения во времени чувствительности преобразователей датчика. Когда на преобразователи датчика воздействует внешнее возмущающее воздействие, приводящее к синхронному изменению характеристик этих преобразователей, то вместе с ними изменяется модуль вектора чувствительности. Величина паразитного дисбаланса и величина полезного дисбаланса под воздействием внешнего возмущения изменяются в той же самой мере. Таким образом, учет вектора чувствительности позволяет найти влияние возмущающего воздействия и скомпенсировать изменение паразитного дисбаланса.
В возможных реализациях изобретения, дополнительно отключают подачу второго возбуждающего сигнала при сохранении подачи первого возбуждающего сигнала и регистрируют значения третьей пары квадратурных сигналов, а значения этой пары используют для компенсации погрешностей нахождения дисбаланса датчика. Предпочтительным образом, вектор чувствительности датчика формируют как разность векторов, соответствующих значениям второй и третьей пар квадратурных сигналов. То есть, вектор чувствительности оказывается направленным по биссектрисе угла, образуемого двумя векторами, соответствующими значениям второй и третьей пар квадратурных сигналов. Такой подход позволяет повысить точность компенсации за счет ориентации вектора чувствительности по направлению значимого компонента выходного вектора, а также за счет учета изменения чувствительности обоих преобразователей.
Вектор чувствительности, сформированный таким образом, мы будем называть синфазным. Дифференциальный отклик датчика исключается из синфазного вектора чувствительности, практически полностью. Таким образом, длина синфазного вектора чувствительности значительно точнее характеризует коэффициент передачи на пути от генератора до входа синхронного детектора, чем длина вектора чувствительности, построенного на основании только лишь значений второй пары квадратурных сигналов.
Перед проведением измерения проводят балансировку датчика. Балансировка датчика состоит в регистрации квадратурных сигналов и вычислении на их основе начального вектора чувствительности и начального дисбаланса как проекции вектора дифференциального выходного сигнала на направление вектора чувствительности. В ходе балансировки, полученный начальный дисбаланс представляет собой паразитный дисбаланс. В ходе последующего измерения, получают полный измеренный дисбаланс и измеренный вектор чувствительности. Модуль вектора чувствительности между моментами проведения балансировки и моментом измерения изменяется под действием возмущающего фактора. Коэффициент измерения чувствительности, равный отношению модуля измеренного вектора чувствительности к начальному вектору чувствительности, отражает как меру изменения паразитного дисбаланса, так и меру изменения полезного дисбаланса, соответствующего измеряемой величине. Поэтому, для нахождения полезного дисбаланса датчика, измеренный дисбаланс датчика делят на коэффициент изменения чувствительности, и далее вычитают начальный дисбаланс датчика. Таким образом, чувствительность датчика к измеряемой величине, оказывается приведенной к чувствительности на момент проведения балансировки, а паразитный дисбаланс полностью компенсируется.
При применении заявленного способа могут возникнуть сложности, связанные с большой разницей по порядку величины между значениями в первой паре, с одной стороны, и во второй и третьей парах, с другой стороны. Как уже указывалось, значения в первой паре представляют собой малые дифференциальные сигналы, измеряемые на фоне больших выходных сигналов одиночных преобразователей, которым соответствуют вторая и третья пары. Регистрация этих сигналов может потребовать очень широкого динамического диапазона измерительного оборудования, используемого для регистрации. Соответственно, применение измерительного оборудования с широким динамическим диапазоном может существенно усложнить устройство для реализации заявленного способа.
Чтобы уменьшить динамический диапазон регистрируемых сигналов, при регистрации значений второй и третьей пары, снижают коэффициент передачи на участке преобразования сигнала от выхода датчика до устройства регистрации значений, во избежание ограничения сигнала на этом участке и в устройстве регистрации. Переключение коэффициента передачи может производиться как на участке преобразования сигнала от входа синхронного детектора до устройства регистрации, так и на участке преобразования сигнала от выхода датчика до входа синхронного детектора. Каждый из перечисленных вариантов реализации имеет свои особенности.
Когда переключение производится на участке преобразования сигнала от входа квадратурного детектора до устройства регистрации, то оно не затрагивает набег фазы высокочастотного сигнала. Как выходной вектор, так и вектор чувствительности преобразуются одной и той же схемой, поэтому, набег фазы для обоих этих векторов оказывается одинаковым. Соответственно, направление вектора чувствительности практически совпадает со значимым компонентом выходного вектора, что позволяет проводить адекватную коррекцию погрешностей. С другой стороны, синхронный детектор должен иметь широкий динамический диапазон входных сигналов, что требует тщательного проектирования этого участка схемы. Переключение коэффициента передачи может быть реализовано либо за счет переключения чувствительности квадратурного детектора, либо за счет переключения коэффициента усиления в усилителе постоянного тока, который усиливает выходной сигнал детектора для подачи на устройство регистрации.
С другой стороны, переключение может быть реализовано на участке преобразования высокочастотного сигнала, еще до его подачи на вход синхронного детектора. В этом случае, переключение коэффициента передачи, скорее всего, вызовет некоторое изменение набега фазы в усилительных элементах, что нарушит согласованность между направлениями вектора чувствительности и значимого компонента выходного вектора. Чтобы избежать этого рассогласования, при нахождении дисбаланса датчика нужно учесть заранее известное изменение фазового сдвига при переключении, для определения которого может потребоваться калибровка высокочастотной части схемы преобразования сигнала. Преимуществом этой реализации можно считать невысокие требования к применяемому синхронному детектору, от которого не требуется широкого динамического диапазона входных сигналов.
Синхронный детектор может быть выполнен по-разному. Например, он может быть истинным квадратурным детектором и одновременно получать от генератора два согласованных опорных сигнала, сдвинутых на 90 градусов относительно друг друга. В таком детекторе, фактически, реализованы два независимых синхронных детектора, каждый из которых подключен к отдельному опорному сигналу и формирует отдельный квадратурный сигнал. Определенную техническую сложность представляет собой обеспечение равенства между собой коэффициентов передачи каждого из синхронных детекторов, что необходимо для точного выполнения векторной обработки сигналов.
Более простым решением может быть использование одного синхронного детектора, попеременно подключаемого к одному и к другому опорным сигналам, сдвинутым друг относительно друга на 90 градусов. Такой синхронный детектор попеременно вырабатывает сначала один, а затем другой квадратурный сигнал. Это решение уменьшает сложность устройства и гарантирует одинаковый коэффициент передачи для обоих квадратурных сигналов, но снижает быстродействие измерения. Описанному решению эквивалентно использование одного и того же опорного сигнала, и попеременное подключение формирователя возбуждающего напряжения на пластинах к ортогональным выходам генератора сигнала возбуждения, напряжения на которых сдвинутым друг относительно друга на 90 градусов.
Значения второй и третьей пары квадратурных сигналов позволяют косвенно, без использования значений первой пары, получить выходной вектор, если провести векторное сложение:  Однако, этот метод отличается низкой точностью, поскольку малая величина выходного вектора
Однако, этот метод отличается низкой точностью, поскольку малая величина выходного вектора  находится как сумма двух больших величин векторов
находится как сумма двух больших величин векторов  при измерении которых имеются относительные погрешности, порождающие абсолютные отклонения, пропорциональные длине данных векторов. Эти отклонения оказываются достаточно большими в сравнении с
при измерении которых имеются относительные погрешности, порождающие абсолютные отклонения, пропорциональные длине данных векторов. Эти отклонения оказываются достаточно большими в сравнении с  что снижает ценность подобного косвенного измерения. Фактически, речь идет об использовании дифференциального датчика в недифференциальном режиме, когда результат дифференциального измерения и связанные с ним преимущества не используются. При непосредственном получении
что снижает ценность подобного косвенного измерения. Фактически, речь идет об использовании дифференциального датчика в недифференциальном режиме, когда результат дифференциального измерения и связанные с ним преимущества не используются. При непосредственном получении  из небольших по величине дифференциальных квадратурных сигналов первой пары, относительные погрешности измерения вызывают малые абсолютные отклонения. Поэтому, в заявленном способе обязательно проводится измерение первой пары квадратурных сигналов.
из небольших по величине дифференциальных квадратурных сигналов первой пары, относительные погрешности измерения вызывают малые абсолютные отклонения. Поэтому, в заявленном способе обязательно проводится измерение первой пары квадратурных сигналов.
Особые преимущества дает применение указанного способа для измерения с использованием многоэлементного дифференциального датчика, содержащего более чем два преобразователя. Многоэлементный дифференциальный датчик применяется для нахождения сразу нескольких значений дисбаланса. Как правило, разделяют преобразователи на группы, состоящие из двух или большего числа преобразователей, и последовательно проводят измерения в нескольких режимах. Каждому режиму соответствует подача возбуждающих напряжений только на одну группу преобразователей. Пример такого датчика рассмотрен в прототипе заявленного изобретения, где множество получаемых значений дисбаланса соответствует перепадам эффективной диэлектрической проницаемости в различных местах контролируемого листа, соответствующих расположению групп преобразователей.
В многоэлементных датчиках, в связи с большим количеством преобразователей, особую сложность представляет выравнивание фазового сдвига на пути возбуждающего сигнала от генератора к преобразователю. При рабочей частоте 100 МГц даже небольшая задержка, равная 560 пс, приводит к набегу фазы 20 градусов. Полностью устранить набеги фазы между разными преобразователями датчика технически не представляется возможным. Если не предусмотрено индивидуальное отслеживание и компенсация таких набегов применительно к разным режимам измерения, то возникает различие в чувствительности и в соотношении сигнал/шум между этими режимами. Указанное различие чувствительности оказалось одним из главных недостатков, выявленных при практическом применении прототипа.
В одной из реализаций заявленного изобретения, специально ориентированной на многоэлементный датчик, при использовании датчика, содержащего более чем два преобразователя, для проведения измерений предварительно определяют набор режимов подачи сигналов возбуждения, так что для каждого из режимов заранее указан по меньшей мере один преобразователь для подачи на него первого сигнала возбуждения и заранее указан по меньшей мере один преобразователь для подачи на него второго сигнала возбуждения, а на оставшиеся преобразователи сигнал возбуждения не подается, и выполняют цикл измерения в каждом из определенных режимов.
Для каждого режима определяется свой вектор чувствительности, который позволяет с высокой точностью получить результат измерения, за счет компенсации влияния внешних возмущающих факторов, как уже было описано ранее. В дополнение к этому, отслеживание индивидуального вектора чувствительности для каждого набора преобразователей, задействованного в определенном режиме, нейтрализует вредное влияние значительных и отличающихся друг от друга набегов фазы, возникающих в разных режимах. За счет этого, удается добиться одинаковой чувствительности датчика в различных режимах. К измерению в каждом отдельном режиме многоэлементного дифференциального датчика могут быть применены все улучшения, перечисленные ранее для дифференциального датчика. Особую выгоду дает приведение чувствительности в каждом режиме к чувствительности на момент балансировки. В одной из реализаций, для каждого из режимов, перед проведением измерения, в отсутствие объекта измерения, определяют начальный вектор чувствительности и начальный дисбаланс датчика, соответствующие выбранному режиму, а в ходе цикла измерения определяют измеренный вектор чувствительности и измеренный дисбаланс датчика, соответствующие выбранному режиму, и вычисляют коэффициент изменения чувствительности, соответствующий выбранному режиму и равный отношению модуля измеренного вектора чувствительности, соответствующего выбранному режиму, к модулю начального вектора чувствительности, соответствующего выбранному режиму, а для нахождения дисбаланса датчика, соответствующего измеряемой величине в выбранном режиме, измеренный дисбаланс датчика, соответствующий выбранному режиму, делят на коэффициент изменения чувствительности, соответствующий выбранному режиму, и вычитают начальный дисбаланс датчика, соответствующий выбранному режиму.
Описанная реализация оказывается весьма эффективной, когда преобразователи, задействованные в каждом режиме, расположены в непосредственной близости друг от друга и на них действуют одинаковые возмущающие факторы. При этом, достаточно часто бывает, что, за счет большого габарита многоэлементного датчика, на преобразователи, задействованные в различающихся режимах, действуют возмущающие факторы, различающиеся по величине. Однако, так как изменение чувствительности отслеживается индивидуально для каждого из режимов, то оно нейтрализует это различие в возмущающих факторах. На практике это обозначает, что вредное влияние геометрической нестабильности конструкции самого датчика, проявляющейся, например, в прогибах и кручениях пластин емкостного датчика под действием вибрации, в значительной степени нейтрализуется. Аналогичным образом, в случае магнитных датчиков, нейтрализуется влияние большой ферромагнитной массы, расположенной ближе к одному из краев зоны чувствительности датчика.
На Фиг. 1 показаны векторные диаграммы сигналов, возникающих в дифференциальном датчике, возбуждаемом высокочастотными противофазными сигналами.
На Фиг. 2 изображена схема включения дифференциального датчика, используемого в примере реализации заявленного способа.
На Фиг. 3 показана векторная диаграмма, поясняющая получение результата измерений.
На Фиг. 4 изображена схема включения многоэлементного дифференциального датчика.
Практическая реализация способа приведена на примере дифференциального емкостного датчика неоднородности рулонного материала. Этот датчик используется в машине контроля качества бумажного полотна, где полотно продвигается через датчик при помощи транспортировочного механизма. Задача контроля толщины бумаги при помощи емкостного датчика предъявляет высокие требования к способу измерения. Как указано в прототипе, при зазоре между пластинами измерительного конденсатора, равном 0,5 мм, и толщине бумаги 0,1 мм, двукратное уменьшение толщины приведет к изменению сигнала емкостного преобразователя на 5%. При этом, изменение зазора на 0,1 мм, например, из-за вибрации, приведет к изменению сигнала на 20%. Эти значения дают представление о типовых величинах изменения сигналов, которые необходимо обрабатывать.
Электрическая схема устройства, используемого в практической реализации, приведена на Фиг. 2. Датчик установлен в плоском канале, по которому перемещается бумажное полотно (на рисунке не показан). Пластины 6 и 7 измерительных конденсаторов емкостного датчика размещены на одной стороне канала, а объединенная пластина 8 размещена строго напротив пластин 6 и 7 на другой стороне канала. Один преобразователь датчика представляет собой конденсатор с пластинами 6 и 8, а второй преобразователь имеет пластины 7 и 8. При прохождении полотна по плоскому каналу между пластинами емкость конденсатора 6-8 и конденсатора 7-8 изменяется в зависимости от толщины полотна. В отсутствие неоднородности эти емкости будут одинаковыми, но при наличии неоднородности полотна, находящейся в пределах зазора одного из конденсаторов, емкости конденсаторов будут различаться. Принцип действия этого датчика основан на обнаружении разницы между емкостями конденсаторов 6-8 и 7-8. Аналогичный принцип обнаружения неоднородности используется в прототипе заявленного изобретения.
Пластины 6 и 7 подключены к источнику 1 высокочастотного возбуждающего напряжения. Он содержит кварцевый генератор 2, обеспечивающий выдачу прямоугольного сигнала, имеющего форму меандра, на выходе OUT_0. Частота сигнала составляет 100 МГц. На выходах OUT_90 и OUT_180 генератор формирует сигналы одной и той же частоты и формы, но сдвинутые относительно сигнала OUT_0 по фазе на 90 градусов и на 180 градусов, соответственно.
Противофазные сигналы OUT_0 и OUT_180 подаются с генератора 2 на логические элементы 3 и 4 типа ИЛИ, выполненные по технологии КМОП на общем полупроводниковом кристалле. Эти логические элементы используются в качестве формирователей сигналов возбуждения, подаваемых в противофазе на пластины 6 и 7 датчика. Особенностью логических элементов, выполненных по технологии КМОП, является малое различие амплитуды выходного напряжения. Размах выходного напряжения, фактически, равен напряжению питания, при условии небольшого тока нагрузки. Кроме того, логические элементы такого типа имеют достаточно низкий и стабильный выходной импеданс, который практически не меняется в зависимости от выходного сигнала.
Генератор 2 имеет логические выходы и подключен к входам логических элементов, поэтому, небольшие изменения амплитуды выходных сигналов генератора не влияют на работу схемы. Для простоты подсчета коэффициента передачи на пути от генератора до других элементов тракта обработки сигнала, мы будем считать, что уровни выходного напряжения генератора постоянны и равны номинальным значениям 0 В и 3,3 В. Выходные напряжения логических элементов 3 и 4, наоборот, через пластины 7 и 8 датчика 5 напрямую влияют на напряжения на элементах тракта обработки сигнала, и зависят от напряжения питания. За счет этого, нестабильность напряжения питания вызывает нестабильность коэффициента передачи на пути от генератора до других элементов тракта обработки сигнала.
Приемная пластина 8, общая для обоих измерительных конденсаторов, подключена к приемной схеме 9. Эта схема содержит входную резонансную цепь 10, апериодический усилитель 11 высокой частоты, синхронный детектор 12, фильтр 13 низких частот и операционный усилитель 14. При подаче противофазных сигналов возбуждения на пластины 6 и 7, происходит суммирование токов измерительных конденсаторов в приемной пластине 8. В результате, на резонансную схему поступает сумма токов измерительных конденсаторов.
Датчик работает под управлением микроконтроллера 17, имеющего встроенный аналогово-цифровой преобразователь (АЦП). Вход АЦП обозначен ADC_IN. Кроме того, микроконтроллер вырабатывает управляющие логические сигналы, обозначенные PIO0-PIO3. Микроконтроллер также выдает результаты измерения по последовательному каналу связи (на рисунке не показан).
Резонансная цепь 10 служит подавлению помех, проникающих на вход приемной схемы 9 с выхода датчика 5. Кроме того, за счет наличия индуктивности, резонансная цепь 10 позволяет нейтрализовать паразитные емкости экранирующих поверхностей (на рисунке не показаны), которые неизбежно возникают при экранировании датчика от внешних помех и могли бы снизить коэффициент передачи. Фильтр 13 низких частот дополнительно сужает общую полосу чувствительности приемной схемы 9 и также позволяет бороться с помехами, проникающими с выхода датчика 5. Дополнительно, этот фильтр уменьшает вредную высокочастотную пульсацию сигнала на входе АЦП контроллера 17, которая снижает повторяемость результата преобразования.
Микроконтроллер при помощи управляющих сигналов PIO1 и PIO2, подключенных ко входам логических элементов 3 и 4, может независимо друг от друга разрешать и запрещать выдачу переменного напряжения возбуждения с генератора 2 на пластины 6 и 7 датчика. За счет выдачи обоих возбуждающих сигналов, либо каждого из них в отдельности, датчик работает в режиме для получения первой, второй или третьей пар квадратурных сигналов, соответственно.
Управляющий сигнал PIO0 выдается на коммутатор опорного сигнала 18. В зависимости от логического уровня PIO0, коммутатор выдает с генератора 2 на вход синхронного детектора 12 сигнал OUT_0, либо же сигнал OUT_90, сдвинутый относительно него по фазе на 90 градусов. Переключение коммутатора 18 позволяет получать на выходе синхронного детектора 12 как синусный, так и косинусный квадратурный сигнал.
Сигнал PIO3 управляет замыканием и размыканием коммутатора 19. Этот коммутатор переключает коэффициент усиления усилителя постоянного тока, выполненного на операционном усилителе 14 и резисторах 15 и 16. Когда коммутатор замкнут, усилитель постоянного тока обеспечивает коэффициент усиления, равный 20, для квадратурного сигнала, полученного детектором 12 и сглаженного фильтром 13. Когда коммутатор разомкнут, то усилитель постоянного тока работает как повторитель, с коэффициентом усиления, равным 1. Выходной сигнал усилителя постоянного тока подается на вход АЦП микроконтроллера 17. АЦП преобразует напряжение на входе в 12-разрядный цифровой код.
Для измерения квадратурных сигналов микроконтроллер 17 при помощи коммутатора 18 сначала подает напряжение OUT_0 с генератора 2 на вход опорного сигнала синхронного детектора 12. Далее, микроконтроллер 17 выполняет задержку для стабилизации напряжения на выходе приемной схемы 9. Длительность этой паузы в 10 раз превосходит постоянную времени фильтра 13, что позволяет завершиться переходному процессу, так чтобы отклонение от стационарного значения не превышало цены младшего разряда АЦП. Затем, микроконтроллер 17 запускает процесс аналого-цифрового преобразования, в результате которого получается код значения синусного квадратурного сигнала.
Затем, микроконтроллер 17 при помощи коммутатора 18 подает на вход опорного напряжения синхронного детектора 12 напряжение с выхода OUT_90 генератора 2. После шагов задержки для стабилизации напряжения на выходе приемной схемы 9 и аналого-цифрового преобразования, которые в точности аналогичны ранее описанным, получается код значения косинусного квадратурного сигнала. На протяжении измерения квадратурных сигналов, микроконтроллер не изменяет состояния выходов PIO1 - PIO3, за счет чего схема датчика работает с постоянным возбуждением и постоянным коэффициентом усиления. Значения синусного и косинусного квадратурного сигналов образуют пару.
Перед выполнением измерений, при отсутствии бумажного полотна в зазоре датчика 5 и выключенном транспортировочном механизме, микроконтроллер 17 проводит балансировку. Для этого, он последовательно получает первую, вторую и третью пару квадратурных сигналов. Сначала, он выставляет на выходах PIO1 и PIO2 состояние логического нуля, что обеспечивает подачу противофазных сигналов возбуждения на обе пластины 6 и 7. При помощи сигнала PIO3 микроконтроллер 17 переводит коммутатор 19 в замкнутое состояние, что обеспечивает коэффициент усиления постоянного тока, равный 20. Далее, проводится измерение квадратурных сигналов с получением первой пары значений, как это было описано ранее. Из этой пары микроконтроллер формирует координаты выходного вектора  как показано на Фиг. 3.
как показано на Фиг. 3.
После этого, микроконтроллер 17 устанавливает сигнал PIO1 в состояние логической единицы, что запрещает подачу сигнала возбуждения на пластину 6 и сохраняет возбуждение на пластине 7. Одновременно с этим, микроконтроллер 17 выдает сигнал PIO3 на размыкание коммутатора 19, за счет чего усилитель постоянного тока переводится в режим повторителя с коэффициентом усиления 1. Вслед за этим, проводится измерение квадратурных сигналов с получением второй пары значений. Из этой пары микроконтроллер формирует координаты вектора 
Затем, микроконтроллер 17 устанавливает сигнал PIO1 в состояние логического нуля и PIO2 в состояние логической единицы, что запрещает подачу сигнала возбуждения на пластину 7 и сохраняет возбуждение на пластине 6. Вслед за этим, проводится измерение квадратурных сигналов с получением третьей пары значений. Из этой пары микроконтроллер формирует координаты вектора 
Завершив балансировку, микроконтроллер приступает к обработке полученных данных. Этот процесс проиллюстрирован векторной диаграммой на Фиг. 3. Так как при балансировке бумажное полотно в тракте отсутствует и транспортировочный механизм выключен, то вибрации пластин датчика и дисбаланс из-за неоднородностей полотна отсутствуют. Во время балансировки, необходимо найти начальные значения паразитного дисбаланса и вектора чувствительности датчика, которые будут затем использоваться для внесения поправок в результаты измерений. Для этого, микроконтроллер вычисляет вектор чувствительности при балансировке  Длина этого вектора характеризует, в момент балансировки, коэффициент передачи на пути от генератора 1 до входа АЦП микроконтроллера 17, и чувствительность датчика к измеряемой величине. Направление вектора соответствует значимому компоненту выходного вектора
Длина этого вектора характеризует, в момент балансировки, коэффициент передачи на пути от генератора 1 до входа АЦП микроконтроллера 17, и чувствительность датчика к измеряемой величине. Направление вектора соответствует значимому компоненту выходного вектора  датчика. Отметим, что во время балансировки значимый компонент выходного вектора является паразитным дисбалансом. Чтобы найти его, микроконтроллер вычисляет проекцию выходного вектора на вектор чувствительности для режима балансировки
датчика. Отметим, что во время балансировки значимый компонент выходного вектора является паразитным дисбалансом. Чтобы найти его, микроконтроллер вычисляет проекцию выходного вектора на вектор чувствительности для режима балансировки  Отметим, что получаемое при такой проекции скалярное значение имеет знак, то есть, оно может быть как положительными, так и отрицательными. Для последующих вычислений потребуется использовать не сам вектор чувствительности
Отметим, что получаемое при такой проекции скалярное значение имеет знак, то есть, оно может быть как положительными, так и отрицательными. Для последующих вычислений потребуется использовать не сам вектор чувствительности  а только его длину
а только его длину 
Для проведения измерения неоднородности, микроконтроллер выполняет получение первой, второй и третьей пар значений в точности таким же образом, как это делается балансировке. Из первой пары формируются координаты выходного вектора  из второй - вектора
из второй - вектора  из третьей - вектора
из третьей - вектора  Из-за появления полотна в зазоре датчика 5 и из-за вибрации его пластин изменяется емкость измерительных конденсаторов 6-8 и 7-8. В свою очередь, это приводит к сдвигу резонансной частоты цепи 10, куда подключены измерительные конденсаторы. Сдвиг резонансной частоты изменяет коэффициент передачи приемной схемы 9 и набег фазы на пути от генератора до входа фазового детектора. Дополнительно, изменение емкостей измерительных конденсаторов 6-8 и 7-8 изменяет токи, втекающие в приемную схему 9, что также изменяет коэффициент передачи. Поэтому, в сравнении с моментом балансировки, векторная диаграмма сигналов OA'В' поворачивается в положение ОАВ на угол β, на который изменился набег фазы, и масштабируется в соответствии с изменением коэффициента передачи. Дополнительно, из-за появления неоднородности бумажного полотна в зазоре между пластинами 7 и 8, изменяется емкость образованного ими измерительного конденсатора, и возникает дополнительный малый полезный сигнал
Из-за появления полотна в зазоре датчика 5 и из-за вибрации его пластин изменяется емкость измерительных конденсаторов 6-8 и 7-8. В свою очередь, это приводит к сдвигу резонансной частоты цепи 10, куда подключены измерительные конденсаторы. Сдвиг резонансной частоты изменяет коэффициент передачи приемной схемы 9 и набег фазы на пути от генератора до входа фазового детектора. Дополнительно, изменение емкостей измерительных конденсаторов 6-8 и 7-8 изменяет токи, втекающие в приемную схему 9, что также изменяет коэффициент передачи. Поэтому, в сравнении с моментом балансировки, векторная диаграмма сигналов OA'В' поворачивается в положение ОАВ на угол β, на который изменился набег фазы, и масштабируется в соответствии с изменением коэффициента передачи. Дополнительно, из-за появления неоднородности бумажного полотна в зазоре между пластинами 7 и 8, изменяется емкость образованного ими измерительного конденсатора, и возникает дополнительный малый полезный сигнал  прибавляющийся к сигналу
прибавляющийся к сигналу  и сонаправленный ему.
и сонаправленный ему.
Собственно, нахождение полезного дисбаланса, то есть, длины этого сигнала, характеризующего неоднородность, и является конечной целью измерения.
Приращение отклика преобразователя  на измеряемую величину невозможно непосредственно измерить, но его можно получить методом вычисления из непосредственно измеряемых векторов
на измеряемую величину невозможно непосредственно измерить, но его можно получить методом вычисления из непосредственно измеряемых векторов  а также данных балансировки. Для этого, данные измерения необходимо обработать с учетом описанных изменений коэффициента передачи и набега фазы, а также результатов балансировки.
а также данных балансировки. Для этого, данные измерения необходимо обработать с учетом описанных изменений коэффициента передачи и набега фазы, а также результатов балансировки.
Микроконтроллер вычисляет вектор чувствительности при измерении 
 Отметим, что в силу малости отклика
Отметим, что в силу малости отклика  его вкладом в длину вектора чувствительности можно пренебречь. Поворот и изменение вектора
его вкладом в длину вектора чувствительности можно пренебречь. Поворот и изменение вектора  по отношению к ранее найденному
по отношению к ранее найденному  характеризуют изменение набега фазы и коэффициента передачи при измерении, в сравнении с моментом проведения балансировки.
характеризуют изменение набега фазы и коэффициента передачи при измерении, в сравнении с моментом проведения балансировки.
Микроконтроллер вычисляет коэффициент измерения чувствительности  который характеризует суммарное изменение коэффициента передачи. После этого, он вычисляет проекцию выходного вектора на вектор чувствительности для режима измерения
который характеризует суммарное изменение коэффициента передачи. После этого, он вычисляет проекцию выходного вектора на вектор чувствительности для режима измерения  Как видно из векторной диаграммы, значение MP с высокой степенью точности представляет собой сумму компонента MN паразитного дисбаланса в направлении полезного сигнала плюс скалярное значение полезного дисбаланса NP. На самом деле, NP не совсем точно передает полезную разность |АС| между амплитудами выходного сигнала преобразователей, поскольку |NP|=|AC|cosδ, где δ=α/2 и α есть угол между выходными сигналами преобразователей 6-8 и 7-8. Относительная погрешность такого представления полезного дисбаланса равна 1-cosδ. Для угла α, равного 20 градусам, что соответствует полученным нами наихудшим экспериментальным результатам, эта погрешность примерно равна 0,015. Это значение погрешности мало подвержено влиянию возмущающих факторов, так как угол зависит от мало изменяющихся параметров, таких как геометрическая разность хода возбуждающих сигналов по проводникам к пластинам 6 и 7, и разность задержек распространения в логических элементах 3 и 4. Поэтому, значимость данной погрешности невелика и она может рассматриваться как небольшое и постоянное по величине снижение чувствительности датчика.
Как видно из векторной диаграммы, значение MP с высокой степенью точности представляет собой сумму компонента MN паразитного дисбаланса в направлении полезного сигнала плюс скалярное значение полезного дисбаланса NP. На самом деле, NP не совсем точно передает полезную разность |АС| между амплитудами выходного сигнала преобразователей, поскольку |NP|=|AC|cosδ, где δ=α/2 и α есть угол между выходными сигналами преобразователей 6-8 и 7-8. Относительная погрешность такого представления полезного дисбаланса равна 1-cosδ. Для угла α, равного 20 градусам, что соответствует полученным нами наихудшим экспериментальным результатам, эта погрешность примерно равна 0,015. Это значение погрешности мало подвержено влиянию возмущающих факторов, так как угол зависит от мало изменяющихся параметров, таких как геометрическая разность хода возбуждающих сигналов по проводникам к пластинам 6 и 7, и разность задержек распространения в логических элементах 3 и 4. Поэтому, значимость данной погрешности невелика и она может рассматриваться как небольшое и постоянное по величине снижение чувствительности датчика.
Паразитный дисбаланс, как уже рассматривалось, при воздействии возмущающего фактора масштабируется вместе со всей векторной диаграммой. Основываясь на этом, контроллер находит ненормированное значение полезного дисбаланса, проводя скалярное вычитание начального паразитного дисбаланс с поправкой на изменение чувствительности:

И, наконец, контроллер вычисляет значение полезного дисбаланса, нормированное на чувствительность датчика в момент балансировки:
Полученные нами ненормированное NP и нормированное D значения полезного дисбаланса являются относительными величинами. Значение полезного сигнала можно привести к абсолютным физическим величинам, например, к величине перепада толщины бумаги, измеренной в микрометрах. Для этого нужно пропустить через устройство специально изготовленную калибровочную мишень с известным перепадом толщины, измеренным при помощи микрометра. Значение полезного дисбаланса, соотнесенное с перепадом толщины на мишени, позволяет получить калибровочный коэффициент для последующего пересчета из относительной величины полезного сигнала в микрометры. Однако, если для этой цели используется ненормированное значение NP, то оно при последовательных измерениях будет разным для одной и той же мишени, поскольку чувствительность датчика изменяется за счет внешних возмущений. Поэтому, калибровочный коэффициент пересчета будет непостоянным и потому неточным. Ценность нормированного значения D состоит в том, что при его вычислении учитывается изменение чувствительности в каждом измерении. Поэтому, его применение дает значительно более высокую точность, так как калибровочный коэффициент изначально был измерен без влияния внешних возмущений, и при последующем использовании этого коэффициента для пересчета результатов измерений в микрометры влияние внешних возмущений тоже минимизируется.
Отметим, что подавляющее большинство вычислений, проводимых во время балансировки и измерения, выполняются в скалярном виде. В векторном виде производится только вычисление скалярных произведений при получении проекций согласно формулам (2) и (3). Это определяет малую вычислительную сложность заявленного способа.
После однократной балансировки, измерения можно производить неоднократно. Например, балансировка может производиться один раз в начале рабочей смены, а далее в течение этой смены измерения могут проводиться с частотой несколько сотен раз в секунду.
Если возмущающее воздействие является достаточно медленным в сравнении с частотой проведения измерений, допустимо регистрировать вторую и третью пару значений квадратурного сигнала не в каждом цикле измерений. То есть, первую пару необходимо регистрировать в каждом цикле измерений, а вторая и третья пара может регистрироваться реже, например, в каждом пятом цикле измерений. Для вычисления в том цикле измерений, когда регистрируется только первая пара, значения второй и третьей пары для проведения измерений следует брать из предшествующего цикла измерений. Подобное снижение частоты измерения второй и третьей пары допустимо, если эти значения, характеризующие возмущающее воздействие, мало меняются между соседними измерениями. Возможна также регистрация второй пары в одном цикле измерений и третьей пары - в другом.
Описанные варианты относительного снижения частоты регистрации второй и третьей пары позволяет повысить частоту регистрации первой пары значений, которая несет в себе значимый компонент выходного вектора. Это может быть важным при быстром изменении измеряемой величины в сравнении с характерным временем изменения возмущающего воздействия.
При регистрации второй и третьей пары значений квадратурных сигналов, сигнал возбуждения подается только на одну из возбуждающих пластин 6 и 7, а на другую подается потенциал общего провода. За счет того, что логические элементы 3 и 4 имеют практически постоянный выходной импеданс при любом значении выходного сигнала, пластины 6 и 7 связаны с общим проводом постоянным импедансом, который не отличается от импеданса при регистрации первой пары значений. Указанный импеданс включается в резонансную цепь 10 через емкости измерительных конденсаторов 6-8 и 7-8. Поскольку импеданс не изменяется, то передаточная характеристика на участке от генератора 2 до входа синхронного детектора 12 остается неизменной во время регистрации всех трех пар квадратурных сигналов. За счет этого, вектор чувствительности с высокой точностью отражает указанную передаточную характеристику в момент регистрации первой пары квадратурных значений, что повышает точность измерений.
Принципиально возможно было бы использовать буферы с третьим состоянием вместо логических элементов 3 и 4. Тогда, для прекращения подачи возбуждающего сигнала, было бы необходимо перевести соответствующий выход буфера в высокоимпедансное состояние. Однако, это привело бы к изменению импеданса, включенного в резонансную цепь 10, и изменению передаточной характеристики. В результате, передаточная характеристика при регистрации первой пары значений была бы несколько отличающейся от характеристики при регистрации второй и третьей пар. Это привело бы к небольшому снижению точности измерений. В целом, при реализации заявленного способа, желательно использовать источники сигнала возбуждения со стабильным импедансом. Однако, изменение импеданса источника приводит к небольшому снижению точности, но не к потере общей работоспособности способа и его технического результата.
Для дальнейшего повышения точности датчика, желательно проводить компенсацию статической ошибки. Синхронный детектор 12, операционный усилитель 14 и АЦП микроконтроллера 17 являются источниками статических ошибок, возникающих как прибавление постоянного ненулевого значения к любому действительному значению, получаемому в результате синхронного детектирования. Статические ошибки характерны для всех аналоговых схем, обрабатывающих сигналы постоянного тока. Кроме того, источником статической ошибки может быть постоянная по амплитуде наводка сигналов генератора 2, проходящая на элементы приемной схемы 9 минуя датчик 5.
Для компенсации статической ошибки, микроконтроллер 17 должен полностью отключить подачу высокочастотного сигнала возбуждения на датчик 5, выдать управляющий уровень PIO3 для замыкания коммутатора 19 и провести регистрацию первой статической пары квадратурных сигналов. Затем, он должен выдать управляющий уровень PIO3 для размыкания коммутатора 19 и провести регистрацию второй статической пары квадратурных сигналов. В ходе последующей регистрации, значения первой статической пары должны вычитаться из значений первой пары квадратурных сигналов, а значения второй статической пары должны вычитаться из значений как второй, так и третьей пары квадратурных сигналов, чтобы получить истинные значения этих трех пар. Применение двух статических пар обусловлено тем, что статические ошибки изменяются при переключении коэффициента усиления усилителя 14. Регистрацию первой и второй статических пар желательно проводить раз в несколько секунд, чтобы отслеживать температурный дрейф статической ошибки аналоговых элементов 12, 14 и 17, осуществляющих обработку сигналов постоянного тока.
Для контроля неоднородности бумажного полотна по всей ширине можно установить в тракте множество емкостных датчиков 5, оснащенных измерительной схемой, построенной по принципу, показанному на Фиг. 2. Для каждого из датчиков необходимо обеспечить выполнение описанного выше способа измерения. Каждый из датчиков, при движении полотна транспортировочным механизмом, контролирует протяженную дорожку на полотне. Датчики необходимо расположить таким образом, чтобы эти дорожки в небольшой степени перекрывались. Для того, чтобы избежать взаимных помех в виде биений, датчики должны быть синхронизированы по частоте и фазе возбуждающего сигнала. Для этого их измерительные схемы должны иметь общий генератор.
Более простое решение для контроля полотна по всей ширине, требующее меньшего числа компонентов, может быть реализовано с использованием многоэлементного датчика, показанного на Фиг. 4. Подобный датчик описан, например, в прототипе заявленного изобретения. Многоэлементный емкостной датчик 21 содержит шестнадцать возбуждающих пластин 22, обозначенных Е0-Е15, и одну общую приемную пластину 23. Измерительные конденсаторы формируются между каждой из пластин 22 и приемной пластиной 23. Датчик 21 позволяет реализовать 15 режимов, пронумерованных от 0 до 14. В режиме 0 противофазные сигналы возбуждения подаются на пластины Е0, Е1; в режиме 1 - на пластины El, Е2; и так далее до режима 14, в котором сигналы подаются на пластины Е14, Е15.
Каждый из режимов соответствует активации пары соседних пластин 22, и обеспечивает измерение неоднородности материала в области, покрываемой этими пластинами. Таким образом, пара соседних пластин образует измерительный элемент датчика. Последовательное проведение измерения неоднородности для каждого элемента датчика позволяет измерить неоднородность материала, находящегося в зазоре между пластинами 22 и 23, по всей ширине датчика.
Пластины Е0-Е15 подключены к выходам мультиплексора 24, выполненного по КМОП-технологии. Мультиплексор 24 обеспечивает коммутацию входных сигналов А и В, получаемых с выхода элементов ИЛИ 3 и 4. На управляющую шину GN0…3 мультиплексора 24 с выходов PI04…7 микроконтроллера 17 подается код номера режима Т. Мультиплексор 24 передает сигнал от входа А на выход E[T], и от входа В на выход E[T+l], а остальные выходы подключает к общему проводу. То есть, номер режима М, выставленный микропроцессором на линии PIO4…7, обеспечивает подачу сигналов возбуждения на те пластины 22 датчика 21, которые соответствуют этому режиму.
Пластины, на которые в определенном режиме T не подаются сигналы возбуждения, оказываются соединенными с общим проводом через тот же импеданс выходного каскада КМОП-логики, что и возбуждаемые пластины. За счет этого обеспечивается неизменность суммарного импеданса, связывающего приемную пластину 23 через измерительные конденсаторы датчика 21 с общим проводом. Неизменность импеданса позволяет уменьшить влияние переключения режимов на коэффициент передачи резонансной цепи 10 и апериодического усилителя 11.
Описанный мультиплексор 24 выполняет логическую функцию, которая не является типовой для стандартных логических микросхем. Поэтому, его удобнее всего выполнить на основе программируемой логической микросхемы (CPLD или FPGA).
В каждом из режимов, балансировка, измерение и вычисление результата производятся под управлением микроконтроллера, в точности, как это было описано ранее для одиночного дифференциального датчика. При проведении балансировки, микроконтроллер последовательно перебирает все режимы и запоминает длину вектора чувствительности |OS'T| и проекцию выходного вектора M'N'T на направление вектора чувствительности  для каждого режима T с номером от 0 до 14. После запуска процесса измерения, микроконтроллер последовательно перебирает все режимы и проводит измерения трех пар значений и вычисления для каждого отдельного режима Т с номером от 0 до 14, получая нормированное значение полезного сигнала DT. При вычислениях используются результаты балансировки, ранее запомненные для соответствующего режима.
для каждого режима T с номером от 0 до 14. После запуска процесса измерения, микроконтроллер последовательно перебирает все режимы и проводит измерения трех пар значений и вычисления для каждого отдельного режима Т с номером от 0 до 14, получая нормированное значение полезного сигнала DT. При вычислениях используются результаты балансировки, ранее запомненные для соответствующего режима.
Таким образом, каждое из полученных значений DT соответствуют нормированной неоднородности, находящейся на элементе датчика, образованного соседними пластинами 22, обозначенными ЕМ и Е(М+1). Воздействие возмущающего фактора на каждую пару пластин обрабатывается отдельно, что позволяет нейтрализовать локальные возмущения, по-разному действующие на элементы датчика. Рассмотрим случай, когда пластина 23 при вибрации изогнулась таким образом, что расстояние до нее от пластин Е0, Е1, Е14 и Е15 практически не изменилось, а расстояние до пластин Е7 и Е8 увеличилось на почти одинаковую величину, так как эти пластины расположены непосредственно рядом. Это реалистичный пример того, как проявляются вибрации элементов датчика, закрепленного по краям тракта и не имеющего опоры посередине тракта.
В результате проведения измерения и последующих вычислений, вектор чувствительности  в режимах 0 и 14 останется неизменным, а в режиме 7 уменьшится. Соответственно, уменьшится коэффициент изменения чувствительности KS7 для режима 7, что приведет к соответствующей поправке при вычитании начального паразитного дисбаланса и практически полной его компенсации. И, наконец, полезный сигнал D7 будет отнормирован к чувствительности на момент балансировки, когда вибрация и деформация датчика отсутствовали. Такое же вычитание начального паразитного дисбаланса и нормировка произойдет и для краевых элементов датчика, с получением полезных сигналов D0 и D14. В каждом из этих случаев, для каждого из режимов Т, используются индивидуальные величины коэффициента KST изменения чувствительности. Таким образом, влияние вибрации на элементы датчика, несмотря на локальные различия в величине этой вибрации, оказывается нейтрализованным.
в режимах 0 и 14 останется неизменным, а в режиме 7 уменьшится. Соответственно, уменьшится коэффициент изменения чувствительности KS7 для режима 7, что приведет к соответствующей поправке при вычитании начального паразитного дисбаланса и практически полной его компенсации. И, наконец, полезный сигнал D7 будет отнормирован к чувствительности на момент балансировки, когда вибрация и деформация датчика отсутствовали. Такое же вычитание начального паразитного дисбаланса и нормировка произойдет и для краевых элементов датчика, с получением полезных сигналов D0 и D14. В каждом из этих случаев, для каждого из режимов Т, используются индивидуальные величины коэффициента KST изменения чувствительности. Таким образом, влияние вибрации на элементы датчика, несмотря на локальные различия в величине этой вибрации, оказывается нейтрализованным.
Компенсация статической ошибки, описанная ранее для дифференциального датчика, может совершенно аналогичным образом применяться и для многоэлементного дифференциального датчика. Отметим, что нулевая пара является общей для всех режимов 0-14, поскольку статические ошибки одинаковы для этих режимов.
Описанный здесь способ измерения при помощи многоэлементного дифференциального датчика может быть применен не только для контроля бумажного полотна, но также и для контроля наличия неоднородностей на банкнотах или других листовых документах. Это позволяет обнаруживать дефекты и признаки износа документа, такие как сквозные отверстия, истончения в местах сгибов, а также склейки, выполненные при помощи слоя клейкой полимерной ленты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ косвенного измерения при помощи дифференциального датчика и устройство для его реализации | 2018 |
|
RU2675405C1 |
| Автоматическое балансирующее устройство | 1985 |
|
SU1293505A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА И ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОКОМПАС, РЕАЛИЗУЮЩИЙ СПОСОБ | 1996 |
|
RU2115889C1 |
| УНИВЕРСАЛЬНЫЙ СЕЛЕКТИВНЫЙ ИНДУКЦИОННЫЙ МЕТАЛЛОИСКАТЕЛЬ | 2021 |
|
RU2772406C1 |
| Устройство для измерения параметров магнитного поля | 2018 |
|
RU2696058C1 |
| Устройство для определения вектора дисбаланса | 1983 |
|
SU1193474A1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2008 |
|
RU2370733C1 |
| Измерительный преобразователь на несущей частоте | 2022 |
|
RU2794248C1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА СРЕДЫ И СООТВЕТСТВУЮЩИЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ИДЕНТИФИКАЦИИ ЯИЦ | 2018 |
|
RU2743933C1 |
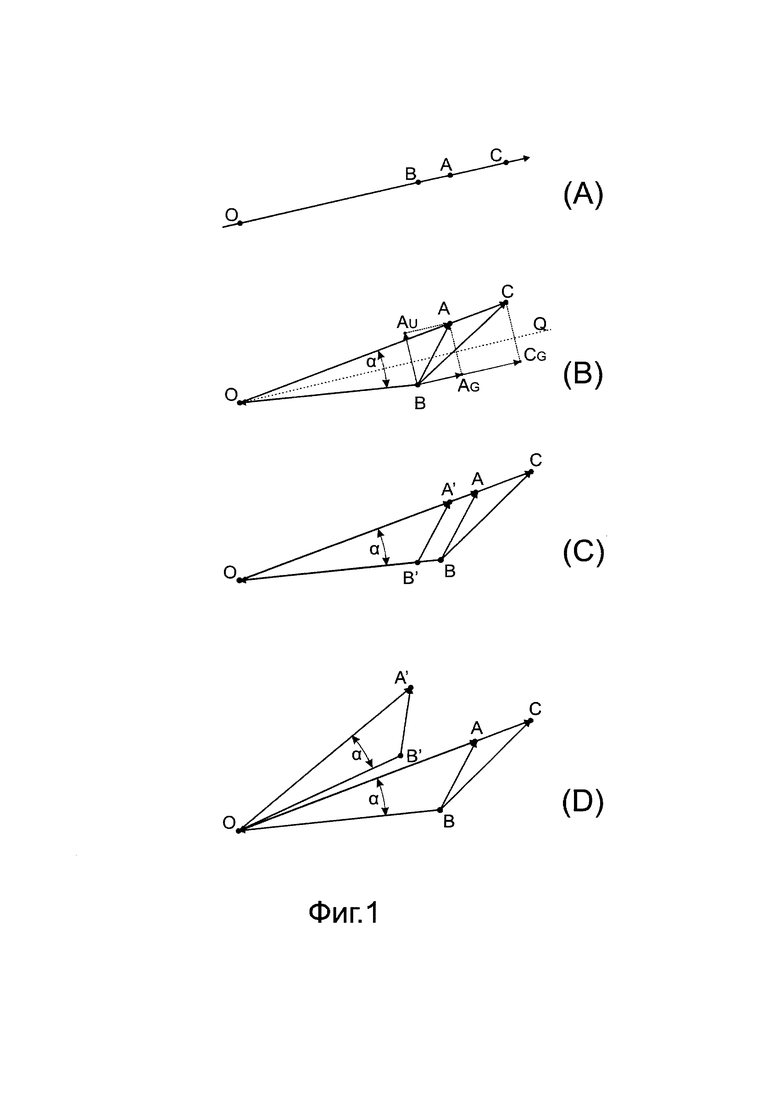
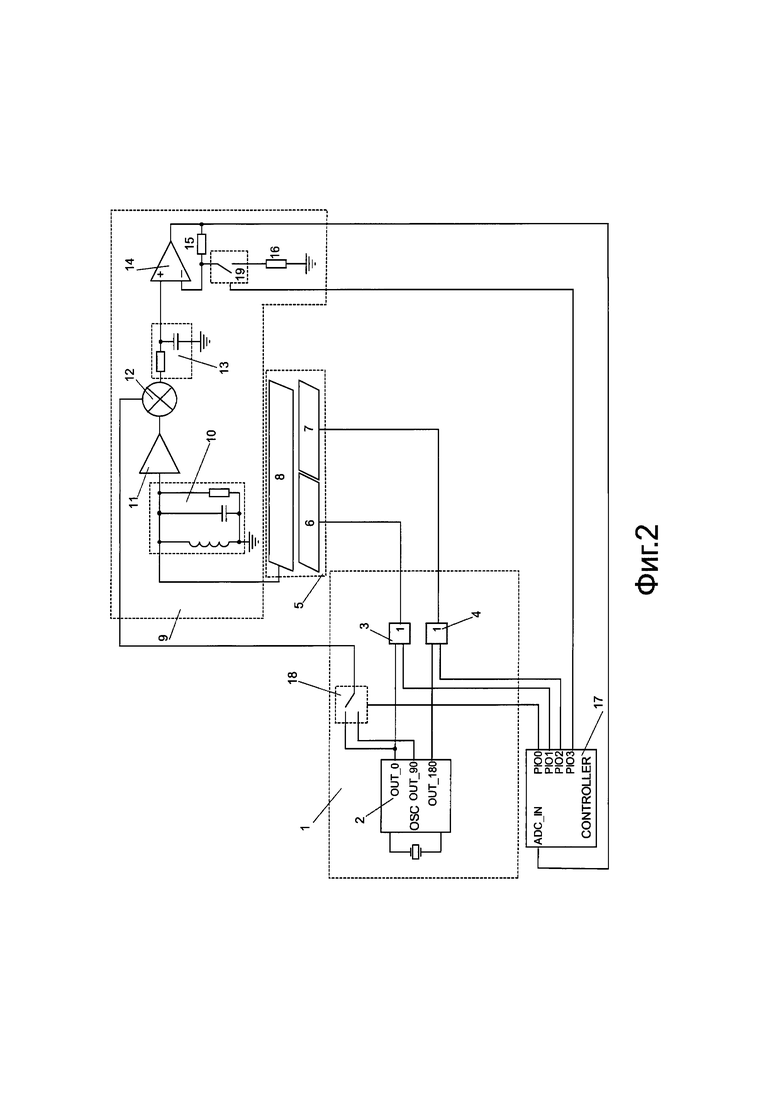
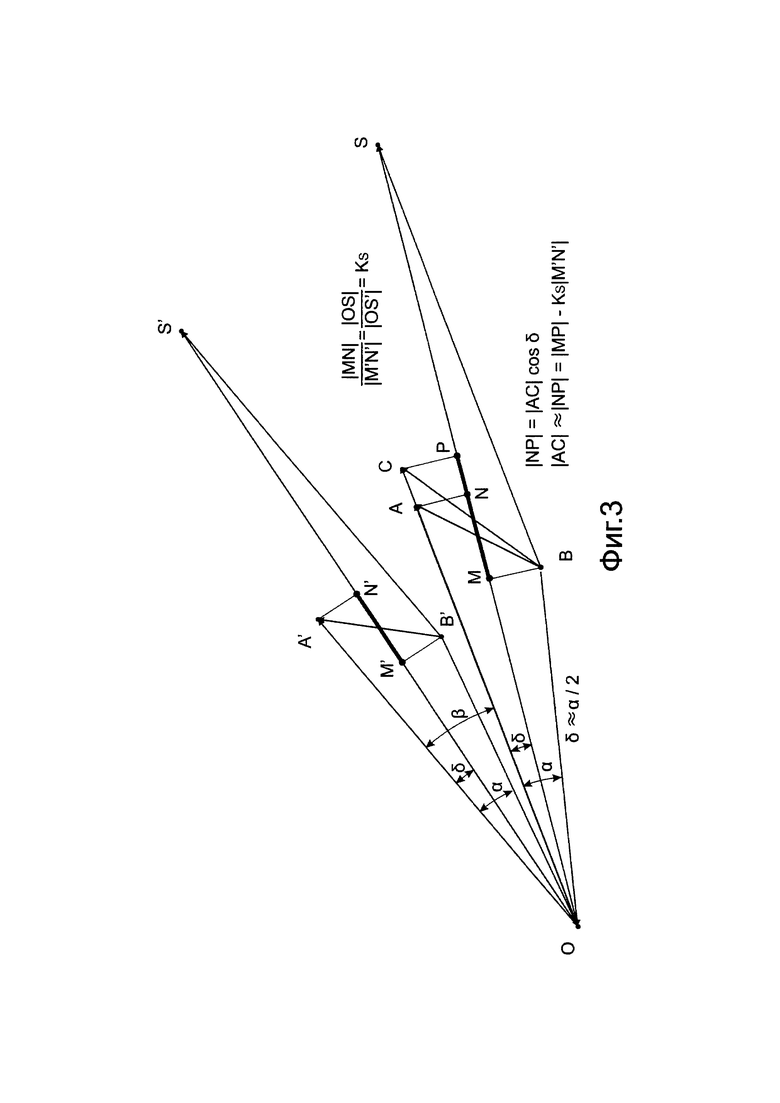
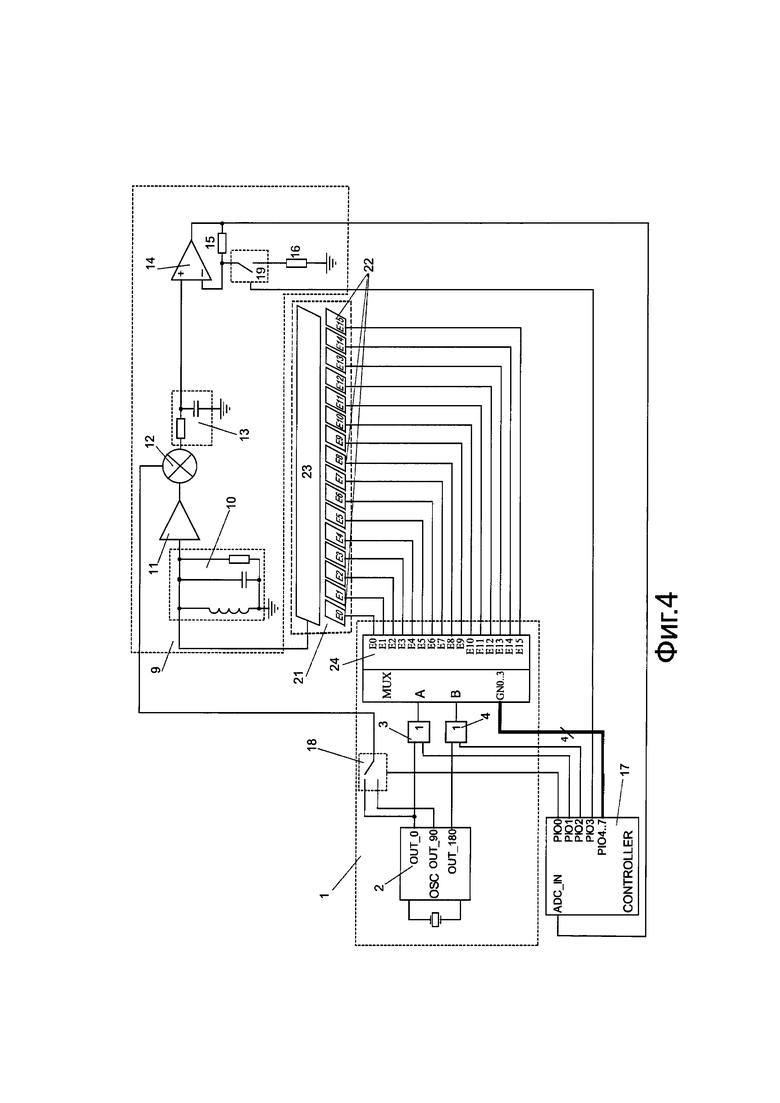
Изобретение относится к области измерительной техники и может быть использовано для измерения при помощи дифференциального датчика. Сущность: дифференциальный датчик содержит, по меньшей мере, два преобразователя, которые связаны с общим выходом датчика и выполнены с возможностью подачи на них сигналов возбуждения. Для выпрямления выходного сигнала датчика используют синхронный детектор, синхронизированный с сигналом возбуждения и выполненный с возможностью формирования пары квадратурных сигналов. Для проведения цикла измерения на датчик подают одновременно первый и второй сигнал возбуждения, являющиеся противофазными. С помощью устройства регистрации на выходе регистрируют значения первой пары квадратурных сигналов. Затем отключают подачу первого сигнала возбуждения при сохранении подачи второго сигнала возбуждения и регистрируют на выходе значения второй пары квадратурных сигналов. После этого на основе полученных значений первой пары находят скалярное значение дисбаланса датчика, соответствующее измеряемой величине. Значения второй пары используют для компенсации погрешностей нахождения скалярного значения дисбаланса датчика. Проводят цикл измерения, по меньшей мере, один раз. Технический результат: снижение погрешности измерения полезного сигнала дисбаланса дифференциального датчика, предназначенного для возбуждения противофазными сигналами высокой частоты. 9 з.п. ф-лы, 4 ил.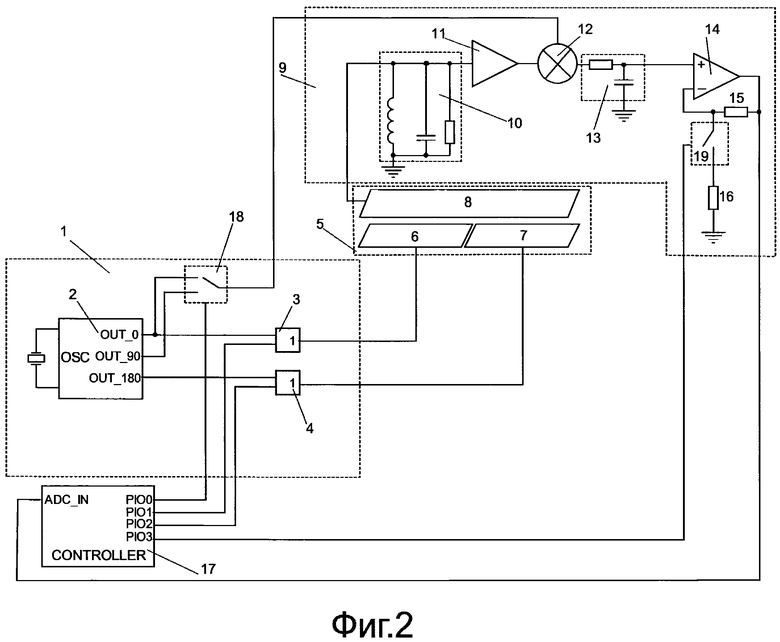
1. Способ измерения при помощи дифференциального датчика, предназначенного для возбуждения противофазными сигналами высокой частоты, в котором дифференциальный датчик содержит, по меньшей мере, два преобразователя, которые связаны с общим выходом датчика и выполнены с возможностью подачи на них сигналов возбуждения; для выпрямления выходного сигнала датчика используют синхронный детектор, синхронизированный с сигналом возбуждения и выполненный с возможностью формирования пары квадратурных сигналов, где для проведения цикла измерения на датчик подают одновременно первый и второй сигнал возбуждения, являющиеся противофазными, и с помощью устройства регистрации на выходе регистрируют значения первой пары квадратурных сигналов, затем отключают подачу первого сигнала возбуждения при сохранении подачи второго сигнала возбуждения и регистрируют на выходе значения второй пары квадратурных сигналов, после чего на основе полученных значений первой пары находят скалярное значение дисбаланса датчика, соответствующее измеряемой величине, а значения второй пары используют для компенсации погрешностей нахождения скалярного значения дисбаланса датчика, причем проводят цикл измерения, по меньшей мере, один раз.
2. Способ измерения по п. 1, в котором, на основе первой пары квадратурных сигналов формируют выходной вектор, а на основе второй пары формируют вектор чувствительности датчика, для нахождения скалярного значения дисбаланса датчика находят значение длины проекции выходного вектора на направление вектора чувствительности, а значение длины вектора чувствительности используют для компенсации изменения во времени чувствительности преобразователей датчика.
3. Способ измерения по п. 1, в котором дополнительно в цикле измерения отключают подачу второго сигнала возбуждения при сохранении подачи первого сигнала возбуждения и регистрируют значения третьей пары квадратурных сигналов, а значения указанной третьей пары используют для компенсации погрешностей при нахождении скалярного значения дисбаланса датчика.
4. Способ измерения по п. 3, в котором в цикле измерения на основе первой пары квадратурных сигналов формируют выходной вектор, а на основе второй и третьей пар формируют соответствующие им векторы чувствительности и вычисляют вектор чувствительности датчика как разность указанных векторов чувствительности, далее для нахождения скалярного значения дисбаланса датчика находят значение длины проекции выходного вектора на направление вектора чувствительности датчика, а значение длины вектора чувствительности используют для компенсации изменения во времени чувствительности преобразователей датчика.
5. Способ измерения по любому из пп. 3, 4, в котором, при регистрации значений второй и третьей пары квадратурных сигналов, снижают коэффициент передачи на участке преобразования сигнала от выхода датчика до устройства регистрации значений, для предотвращения ограничения сигнала на этом участке и в устройстве регистрации.
6. Способ измерения по п. 5, в котором снижение коэффициента передачи реализуют на участке преобразования сигнала от входа синхронного детектора до устройства регистрации.
7. Способ измерения по п. 6, в котором используется датчик, содержащий два преобразователя, а перед проведением измерения, в отсутствие объекта измерения, определяют начальный вектор чувствительности и начальный дисбаланс датчика, а в ходе цикла измерения определяют измеренный вектор чувствительности и измеренный дисбаланс датчика и вычисляют коэффициент изменения чувствительности, равный отношению модуля измеренного вектора чувствительности к модулю начального вектора чувствительности, а для нахождения дисбаланса датчика, соответствующего измеряемой величине, измеренный дисбаланс датчика делят на коэффициент изменения чувствительности и вычитают начальный дисбаланс датчика.
8. Способ измерения по п. 5, в котором снижение коэффициента передачи реализуют на участке преобразования сигнала от выхода датчика до входа синхронного детектора, а при нахождении дисбаланса датчика учитывают заранее известное изменение фазового сдвига на названном участке, которое возникает при снижении коэффициента передачи.
9. Способ измерения по любому из пп. 1-6, 8, в котором используют датчик, содержащий более чем два преобразователя, а для проведения измерений предварительно определяют набор режимов подачи сигналов возбуждения, так что для каждого из режимов заранее указан по меньшей мере один преобразователь для подачи на него первого сигнала возбуждения и заранее указан по меньшей мере один преобразователь для подачи на него второго сигнала возбуждения, а на оставшиеся преобразователи сигнал возбуждения не подается, и выполняют цикл измерения в каждом из определенных режимов.
10. Способ измерения по п. 9, в котором, для каждого из режимов, перед проведением измерения, в отсутствие объекта измерения, определяют начальный вектор чувствительности и начальный дисбаланс датчика, соответствующие выбранному режиму, а в ходе цикла измерения определяют измеренный вектор чувствительности и измеренный дисбаланс датчика, соответствующие выбранному режиму и вычисляют коэффициент изменения чувствительности, соответствующий выбранному режиму и равный отношению модуля измеренного вектора чувствительности, соответствующего выбранному режиму, к модулю начального вектора чувствительности, соответствующего выбранному режиму, а для нахождения дисбаланса датчика, соответствующего измеряемой величине в выбранном режиме, измеренный дисбаланс датчика, соответствующий выбранному режиму, делят на коэффициент изменения чувствительности, соответствующий выбранному режиму, и вычитают начальный дисбаланс датчика, соответствующий выбранному режиму.
| Способ косвенного измерения при помощи дифференциального датчика и устройство для его реализации | 2018 |
|
RU2675405C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ СИГНАЛОВ С ДИФФЕРЕНЦИАЛЬНЫХ ИНДУКТИВНЫХ ИЛИ ЕМКОСТНЫХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ | 2012 |
|
RU2514158C1 |
| ЕМКОСТНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА С ДИФФЕРЕНЦИАЛЬНЫМИ ПАРАМИ | 2010 |
|
RU2559993C2 |
| Способ преобразования угловых перемещений многополюсного датчика | 1990 |
|
SU1716313A1 |
| US 6995021 B2, 07.02.2006 | |||
| US 6608483 B1, 19.08.2003. | |||

