t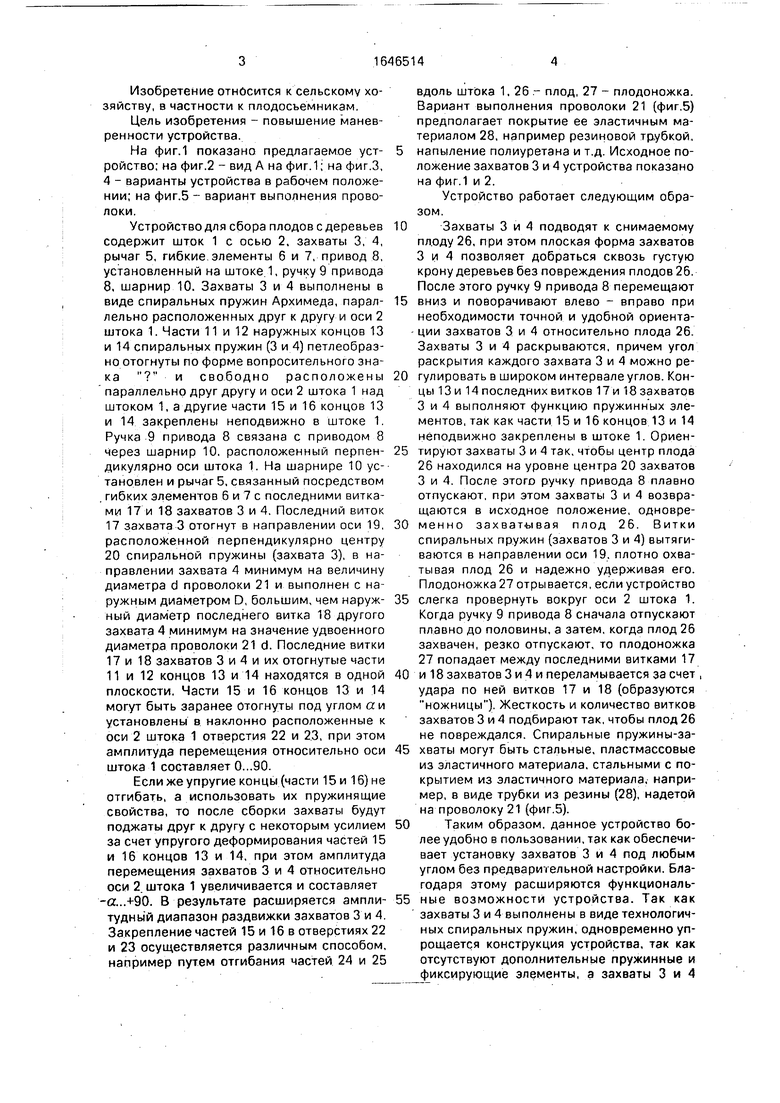
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛОДОСЪЕМНИК (ВАРИАНТЫ) | 2008 |
|
RU2378819C1 |
| ПЛОДОСЪЕМНИК | 2012 |
|
RU2503168C2 |
| Способ механизации и автоматизации сбора урожая на базе индивидуальных мобильных экзоскелетов | 2018 |
|
RU2698260C1 |
| СУЧКОРЕЗ | 1991 |
|
RU2040149C1 |
| ПЛОДОСЪЕМНИК | 1991 |
|
RU2020789C1 |
| Устройство для обрезки кроны деревьев | 1975 |
|
SU534201A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ СНЯТИЯ ПЛОДОВ С ДЕРЕВЬЕВ | 1992 |
|
RU2086093C1 |
| ПЛОДОУБОРОЧНАЯ МАШИНА | 1998 |
|
RU2161397C2 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО СБОРА ПЛОДОВ С ДЕРЕВЬЕВ | 1999 |
|
RU2159533C1 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО СБОРА ПЛОДОВ С ДЕРЕВЬЕВ | 2006 |
|
RU2306692C1 |
Изобретение относится к ручным инструментам для уборки плодов. Цель изобретения - повышение маневренности. Устройство содержит шток 1 с захватами 3 и 4, рычаг 5, гибкие элементы 6 и 7, призод 8, ручку 9. Захваты 3 и 4 выполнены в виде спиральных пружин Архимеда, параллельно расположенных относительно друг друга. Ручка 9 привода 8 связана с ним через шарнир 10, расположенный на рычаге 5 перпен- . дикулярно оси штока 1. Плоская форма захватов 3 и 4 позволяет добраться сквозь густую крону деревьев без повреждения плодов. 5 ил.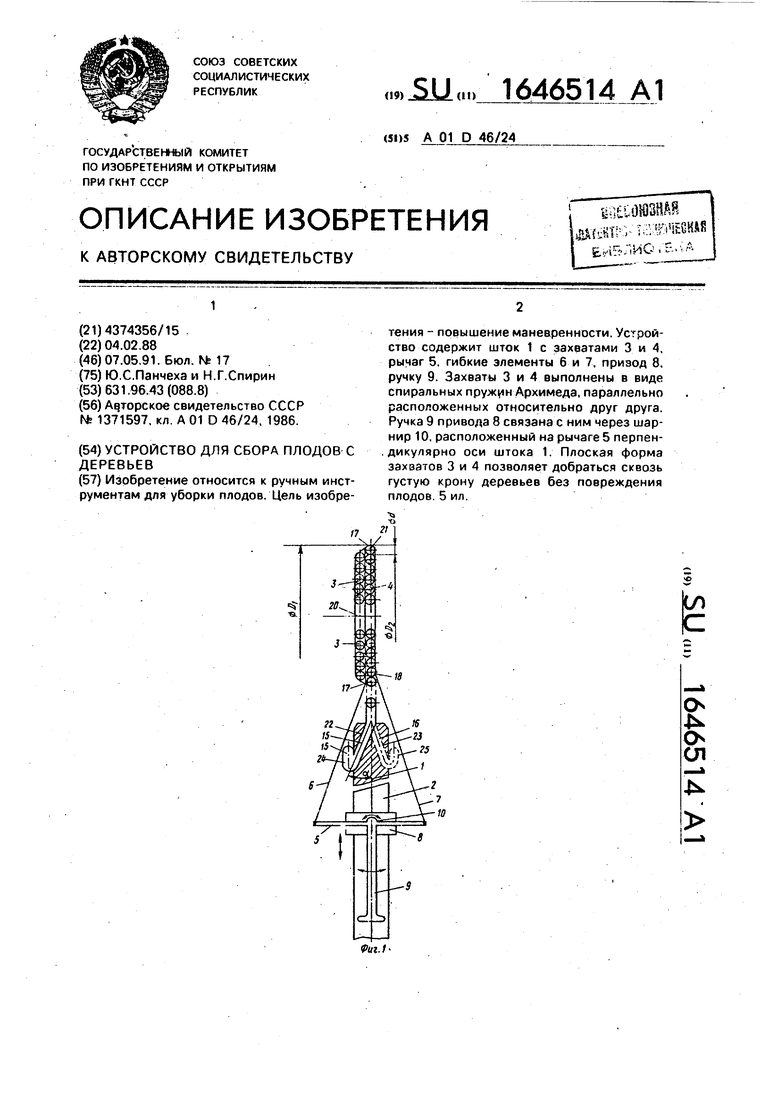
пп
1516
а
25
О
±
о ел
Изобретение относится к сельскому хозяйству, в частности к плодосъемникам.
Цель изобретения - повышение маневренности устройства.
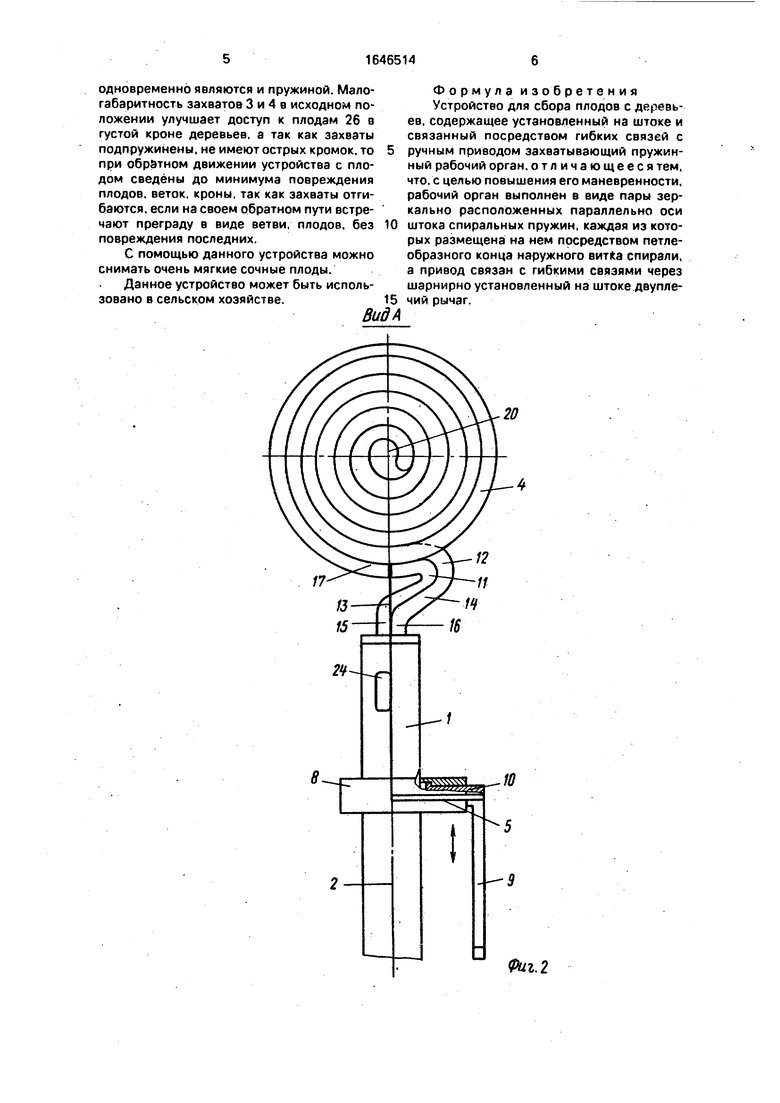
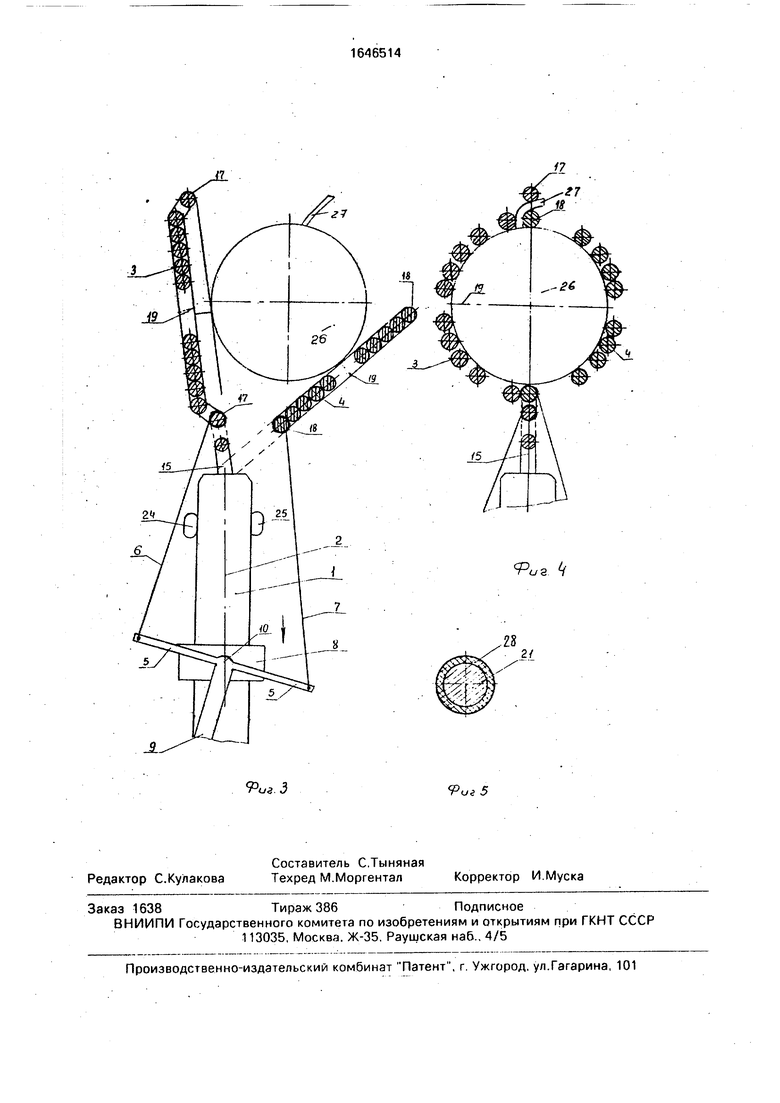
На фиг.1 показано предлагаемое устройство; на фиг.2 - вид А на фиг. 1; на фиг.З, 4 - варианты устройства в рабочем положении; на фиг.5 - вариант выполнения проволоки.
Устройство для сбора плодов с деревьев содержит шток 1 с осью 2, захваты 3, 4, рычаг 5, гибкие элементы 6 и 7, привод 8, установленный на штоке 1, ручку 9 привода 8, шарнир 10. Захваты 3 и 4 выполнены в виде спиральных пружин Архимеда, параллельно расположенных друг к другу и оси 2 штока 1. Части 11 и 12 наружных концов 13 и 14 спиральных пружин (3 и 4) петлеобразно отогнуты по форме вопросительного знака и свободно расположены параллельно друг другу и оси 2 штока 1 над штоком 1, а другие части 15 и 16 концов 13 и 14 закреплены неподвижно в штоке 1. Ручка 9 привода 8 связана с приводом 8 через шарнир 10. расположенный перпендикулярно оси штока 1. На шарнире 10 установлен и рычаг 5,связанный посредством гибких элементов 6 и 7 с последними витками 17 и 18 захватов 3 и 4. Последний виток 17 захвата 3 отогнут в направлении оси 19, расположенной перпендикулярно центру 20 спиральной пружины (захвата 3), в направлении захвата 4 минимум на величину диаметра d проволоки 21 и выполнен с наружным диаметром D, большим, чем наружный диаметр последнего витка 18 другого захвата 4 минимум на значение удвоенного диаметра проволоки 21 d. Последние витки 17 и 18 захватов 3 и 4 и их отогнутые части 11 и 12 концов 13 и 14 находятся в одной плоскости, Части 15 и 16 концов 13 и 14 могут быть заранее отогнуты под углом а и установлены в наклонно расположенные к оси 2 штока 1 отверстия 22 и 23, при этом амплитуда перемещения относительно оси штока 1 составляет 0...90.
Если же упругие концы (части 15 и 16) не отгибать, а использовать их пружинящие свойства, то после сборки захваты будут поджаты друг к другу с некоторым усилием за счет упругого деформирования частей 15 и 16 концов 13 и 14, при этом амплитуда перемещения захватов 3 и 4 относительно оси 2. штока 1 увеличивается и составляет -«...+90. В результате расширяется амплитудный диапазон раздвижки захватов 3 и 4. Закрепление частей 15 и 16 в отверстиях 22 и 23 осуществляется различным способом, например путем отгибания частей 24 и 25
вдоль штока 1, 26 - плод, 27 - плодоножка. Вариант выполнения проволоки 21 (фиг.5) предполагает покрытие ее эластичным материалом 28, например резиновой трубкой,
напыление полиуретана и т.д. Исходное положение захватов 3 и 4 устройства показано на фиг.1 и 2.
Устройство работает следующим образом.
0Захваты 3 и 4 подводят к снимаемому
плоду 26, при этом плоская форма захватов 3 и 4 позволяет добраться сквозь густую крону деревьев без повреждения плодов 26. После этого ручку 9 привода 8 перемещают
5 вниз и поворачивают влево - вправо при необходимости точной и удобной ориентации захватов 3 и 4 относительно плода 26. Захваты 3 и 4 раскрываются, причем угол раскрытия каждого захвата 3 и 4 можно ре0 гулировать в широком интервале углов. Концы 13 и 14 последних витков 17 и 18 захватов 3 и 4 выполняют функцию пружинных элементов, так как части 15 и 16 концов 13 и 14 неподвижно закреплены в штоке 1. Ориен5 тируют захваты 3 и 4 так, чтобы центр плода
26находился на уровне центра 20 захватов 3 и 4. После этого ручку привода 8 плавно отпускают, при этом захваты 3 и 4 возвращаются в исходное положение, одновре0 менно захватывая плод 26. Витки спиральных пружин (захватов 3 и 4) вытягиваются в направлении оси 19. плотно охватывая плод 26 и надежно удерживая его. Плодоножка 27 отрывается, если устройство
5 слегка провернуть вокруг оси 2 штока 1. Когда ручку 9 привода 8 сначала отпускают плавно до половины, а затем, когда плод 26 захвачен, резко отпускают, то плодоножка
27попадает между последними витками 17 0 и 18 захватов 3 и 4 и переламывается за счет
удара по ней витков 17 и 18 (образуются ножницы). Жесткость и количество витков захватов 3 и 4 подбирают так, чтобы плод 26 не повреждался. Спиральные пружины-за5 хваты могут быть стальные, пластмассовые из эластичного материала, стальными с покрытием из эластичного материала, например, в виде трубки из резины (28), надетой на проволоку 21 (фиг.5).
0 Таким образом, данное устройство более удобно в пользовании, так как обеспечивает установку захватов 3 и 4 под любым углом без предварительной настройки. Благодаря этому расширяются функциональ5 ные возможности устройства. Так как захваты 3 и 4 выполнены в виде технологичных спиральных пружин, одновременно упрощается конструкция устройства, так как отсутствуют дополнительные пружинные и фиксирующие элементы, а захваты 3 и 4
одновременно являются и пружиной. Мало- габаритность захватов 3 и 4 в исходном положении улучшает доступ к плодам 26 в густой кроне деревьев, а так как захваты подпружинены, не имеют острых кромок, то при обратном движении устройства с плодом сведены до минимума повреждения плодов, веток, кроны, так как захваты отгибаются, если на своем обратном пути встречают преграду в виде ветви, плодов, без повреждения последних.
С помощью данного устройства можно снимать очень мягкие сочные плоды.
Данное устройство может быть использовано в сельском хозяйстве.
10
15
д А
Формула изобретения Устройство для сбора плодов с деревьев, содержащее установленный на штоке и связанный посредством гибких связей с ручным приводом захватывающий пружинный рабочий орган, отличающееся тем, что. с целью повышения его маневренности, рабочий орган выполнен в виде пары зеркально расположенных параллельно оси штока спиральных пружин, каждая из которых размещена на нем посредством петлеобразного конца наружного витка спирали, а привод связан с гибкими связями через шарнирно установленный на штоке двуплечий рычаг.
Фиъ.2
2/
| Плодосъемник | 1986 |
|
SU1371597A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
