Изобретение относится к землерой- ю-транспортным машинам (ЗТМ),преимущественно бульдозерным агрегатам,мо- жет быть использовано для управления рабочим органом (РО) машины в процессе разработки грунта при наличия широкого спектра внешних нагрузок и является усовершенствованием известно- го гидропривода по авт.св. № 1392214.
Целью изобретения является повышение эффективности работы ЗТМ за счет изменения напорного давления в гидроцилшодре управления рабочим органом на начальном этапе его заглубления в соответствии с изменением полезной силовой загрузки малины.
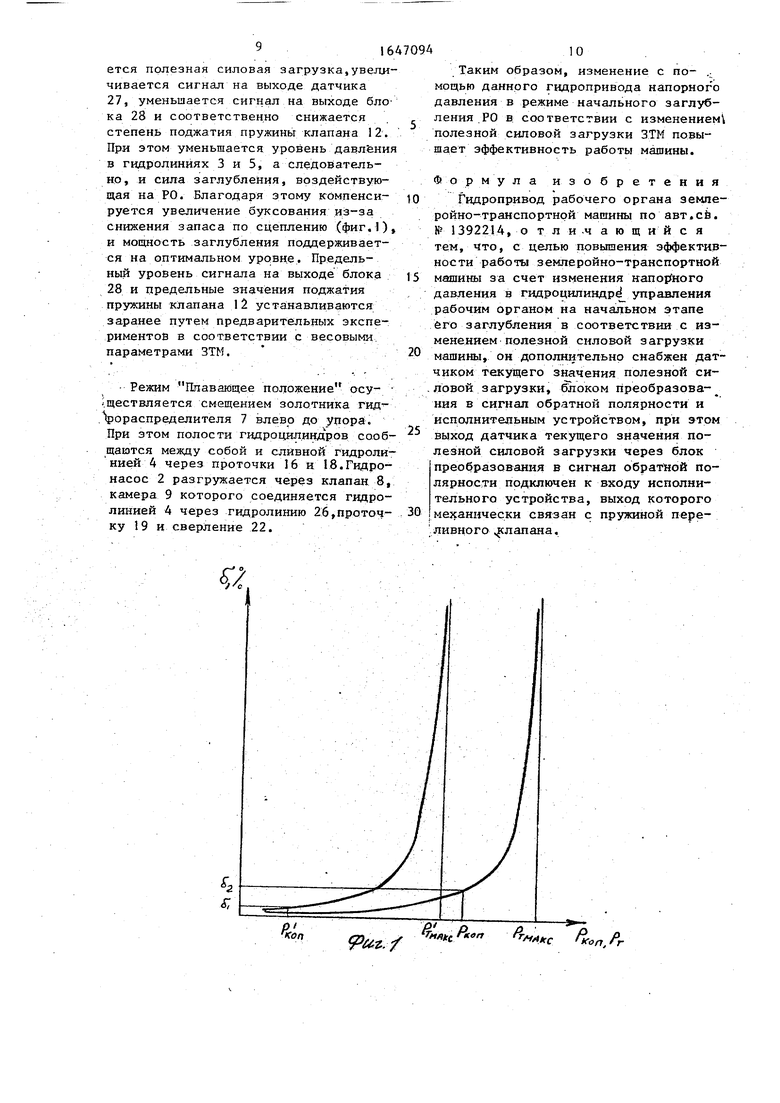
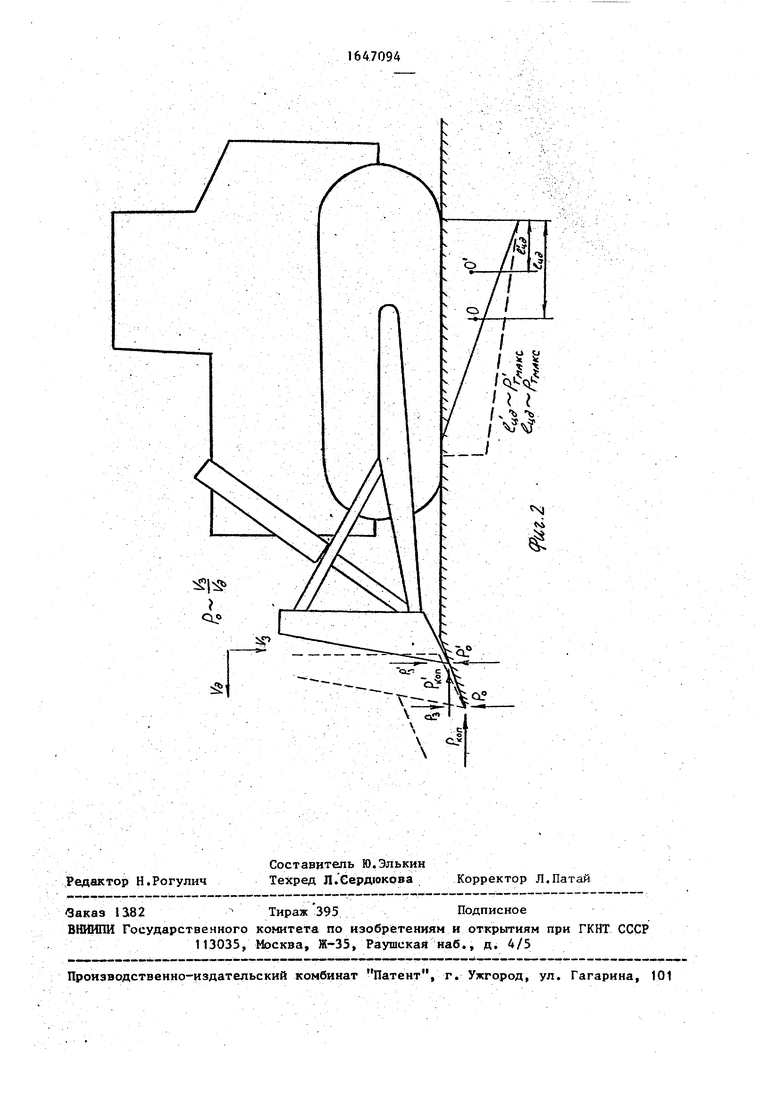
На фиг.1 приведены кривые буксо- вания, отражающие снижение запаса сцепления; на фиг.2 - схема сил действующих на ЗТМ в процессе начального заглубления; на фиг.З - принципиально-конструктивная схема предла- гаемого гидропривода.
Эффективность начального заглубления зависит от соотношения двух основных параметров рабочего процесса ЗТМ - полезной силовой загрузки, определяемой по силе тяги или силе (Рифя ) сопротивления на РО, задаваемой положением РО относительно грунта, и максимальной силой тя ги, реализуемой по сцеплению в д-анны момент (фиг.1). Указанное соотноше- ние проявляется посредством зависимости J Сркоп) где Ј
-YriYs
коэффициент буксования; сила сопротивления на РО; VT и Vg - теоре ическая и действительная скорость ЗТМ. Зная текущее значение Рко ,можно определить о , а далее - Vg,которое вместе со значением скорости V заглубления служит основой для определения текущего значения силы отпора Рфл, , действующей со стороны грунта на режущую кромку РО (фиг.2). Очевидно, что возрастание ,силы РО, обусловленное буксованием, ухудшает условия заглубления,снижая И- Р- V (N - мощность заглубления, P - сила заглубления,определяемая напорным давлением в гидроцилиндре РО) за счет уменьшения V из-за вывешивания остова ЗТМ на РО, Поскольку условия формирования PQ в ходе начального заглубления меняются в соответствии с полезной силовой загрузкой, целесообразно закон изменения последней принять за основу закона ограничения напорного дав- дення, т.е. силы Р .
Как следует из анализа зависимости на фиг.1, на первичном этапе на- |чального заглубления полезная силова загрузка мала, соотношение Vg и . V-з обусловливает незначительную силу PL (фиг.2). Отсюда можно сделать вывод, что, повысив РЗ за счет увеличения напорного давления, можно добиться желаемого роста NJ. Кроме того, этому способствует существенный запас по сцеплению Ртмак г РЈОН , т.е. на первичном этапе заглубления можн
допустить большее смещение центра давления по сравнению с рекомендованным в основном изобретении (1цЗ на фиг.2). При этом снижается макси- мальная сила тяги (Ргдлаксна фиг,1) и запас по сцеплению, л о поскольку рост буксования и снижению из-за него V-g малы ( QJ на фиг. ), то и с учетом предложенных мер по повыше- нию N, сила отпора Р0 изменится незначительно.
В известном изобретении ограничение величины N, в большую сторону установлено на уровне запаса по сцеплению (РТМ(КС Р fcon на Фиг. 1), соответствующего смещению центра давления на 7-10% рабочей длины движителей (точка 0 на фиг.2),,Но эта вепи- чина определяется для конечной,самой напряженной части заглубления, где запас по сцеплению интенсивно снижается. Так как начальный период заглубления характеризуется существенно большим запасом сцепления
(РТмах.Г кап на Фиг.1), то по N 3 имеет место недоиспользование. Это обусловливает замедленное заглубление РО на начальном этапе и снижение производительности ЗТМ в целом.Повы- .шение N з в начале заглубления до уровня,
соответствующего запасу по -,( т-, f
-Р
сцеплению РТШ1СС- Р когт (вместо Рт
коп )
ния РО
/иакс
о
увеличит скорость заглубле- и повысит производительность ЗТМ. При этом алгоритм изменения
напорного давления в гидроцилиндре управления РО можно получить инвертированием текущего сигнала, соответствующего полезной силовой загрузке ЗТМ.
По мере погружения РО в грунт силовая загрузка растет и запас по сцеплению РГДЛДКО Р к0г уменьшается (фиг.1). Этот процесс необходимо компенсировать обратным смещением центра давления ЗТМ по направлению к передней кромке движителей от точки О до точки 0 (фиг. 2). При этомповыша ется сила Рт , реализуемая по сцеплению, т.е. запас по сцеплению РТ-/КДКС РКОП приводится в соответствие с растущей полезной силовой загрузкой,и в результате уровень буксования &л обеспечивает приемлемое значение Р, Это соответствие также достигается изменением напорного давления,обратным изменению полезной силовой загрузки ЗТМ.
с Q
647094б
Гидропривод (фнг.З) содержит бак- , гидронасос 2, напорную 3 и сливную 4 гидролинии, подводящие гидролис Q
15
20
25
30
35
40
45
50
55
нии 5 и 6, гидрораспределитель 7,уп- равняемый клапан 8 разности давлений с пружиной, вход которого сообщен с напорной гидролинией 3, выход - со сливной гидролинией 4, а камера 9 управления через преобразователь 10 давления сообщена с гидрораспределителем 7 и входом предохранительного клапана I I, Переливной клапан 12 снабжен пружиной. Преобразователь 10 давления выполнен в виде нерегулируемого дросселя. Гидроцилиндр 13 управления РО и его полостей 14 и 15 сообщены с гндрораспре- делителем 7 подводящими гидролиниями 5 и 6, гидрораспределитель 7 на золотнике имеет проточки 16 - 21, сверления 22 и 23, управляющие кромки 24 и 25 и снабжен управляющей гидролинией 26. Также гидропривод содержит датчик 27 текущего значения полезной силовой загрузки, своим выходом соединенный с входом блока 28 преобразования в сигнал обратной полярности, выход которого соединен с входом исполнительного устройства 29, выход которого механически соединен с пружиной переливного клапана 12.
Полезную силовую загрузку ЗТМ можно определить, например, по горизон- тальной составляющей силы сопротивления на РО. В этом случае датчик 27 текущей полезной силовой загрузки выполняется в виде тензорезис- торов, установленных на РО в местах с наибольшими силовыми напряжениями (например, в упряжных шарнирах крепления РО) и подключенных к типовым усилительно-согласующим каскадам. Полезный сигнал в этом случае соот- .ветствует разности уровней загрузки при текущем рабочем режиме (с заглублением РО) и при режиме самопередвижения .
Блок 28 преобразования содержит последовательно соединенные фильтр низкой частоты, выделяющий основную составляющую сигнала, и аналоговый инвертор, обеспечивающий обратное изменение выходного сигнала (например, увеличение) по отношению к изменению сигнала на его входе (например, уменьшение),
Исполнительное устройство 29 осуществляет преобразование электрического сигнала с выхода блока 28 преобразования в пропорциональное меха- ническое усилие или перемещение. В качестве устройства 29 может быть использован, например, серийный электромагнит ЭМ-6 (аналогично его применению в распределителях типа iP80, PI50, Р500). При изменении сигнала на входе устройства 29 изменяется сила поджатия пружины переливного клапана 12.
Гидропривод (фиг.З) функциони- рует следующим образом.
Обеспечивается четыре эксплуатационных режима: Нейтраль, Выглуб- ление, Заглубление, Плавающее положение.
В режиме Нейтраль насос 2 разгружен через клапан 8. Подводящие линии 5 и 6 и полости гидроцилиндров 14 и 15 разобщены между собой и баком 1. Этим достигается удержание ра- бочего органа в его вывешенном положении. Камера 9 и вход клапана 12 сообщаются между собой и баком 1 через линию 26, проточку 20 и сверление 23.
Режим Выглубление осуществляется путем перемещения золотника гидрораспределителя 7 вправо, например вручную или посредством гидроусилителя, гидроусилителя с электроуправ- лением. При этом проточка 20 перекрывается, клапан 8 закрывается и тем самым увеличивается давление на выходе гидронасоса 2. Рабочая жидкость под давлением поступает в линию 6 и полость 15 гидроцилиндра 13. На дроселирующей кромке 24 создается перепад давления и давление в гидролинии 6 поступает по первой управляющей гидролинии 26 через преобразова- тель 10 в эаклапанную полость клапана 8, который под действием разности давлений на входе (в заклапанной полости) и своей пружины устанавливает напорное давление и перепад дав лений на уровне, обусловленном размерами клапана 8 и силой поджатия своей пружины. Скорость перемещения штока гидроцилиндра 13 зависит от степени открытия рабочего проходного се чения золотника гидрораспределителя 7. При изменении внешней нагрузки при перемещении штока гидроцилиндра 13 с заданной скоростью изменяется
давление перепада на клапане 8 и он, в свою очередь, изменяет свое положение, чтобы восстановить первоначальную скорость и перепад давлений,при этом напорное давление и давление в гидролинии 26 устанавливаются по уровню внешней нагрузки. Таким образом, реализуется известный принцип гидравлической отрицательной обратной связи по перепаду давления и принцип позиционного регулирования.При различных смещениях золотника гидрораспределителя 7 скорость перемещения штока изменяется пропорционально. При достижении уровня внешней нагрузки, соответствующего настройке предохранительного клапана И,последний срабатывает и ограничивает давление в напорной гидролинии 3.
Режим Заглубление осуществляется смещением золотника гидрораспределителя 7 влево. При этом происходит процесс загрузки гидронасоса 2. Рабочая жидкость поступает в гидролинию 5 и перепад образуется на дросселирующей кромке 25 золотника.Давление в гидролинии 5 поступает через гидролинию 26, преобразователь 10, проточку 21 к входу переливного клапана 12. Процесс установления перепада давления происходит аналогично режиму Выглубление. Силовое регулирование производит переливной клапан 12 в качестве первого каскада и клапан 8 как второй, более мощный каскад. Значение поддерживаемого давления в гидролинии 5, полости 14 гид- роцилиндра 13 и гидролинии 3 (с учетом перепада давления) устанавливается соотношением рабочего сечения клапана 12 и степенью поджатия его пружины. В начале заглубления РО текущее значение полезной силовой загрузки, а следовательно, сигнал с выхода датчика 27 минимальны. Сигнал на выходе блока 28 преобразования принимает максимально возможное значение, обеспечивая с помощью исполнительного устройства 29 максимально возможное поджатие пружины клапана 12. В гидролиниях 3 и 5 устанавливается давление, соответствующее степени поджатия пружины клапана 12.При этом на РО через шток исполнительного гидроцилиндра 13 воздействует максимально возможная сила, обеспечивающая необходимую мощность заглубления. В процессе заглубления РО увеличивается полезная силовая загрузка,увеличивается сигнал на выходе датчика 27, уменьшается сигнал на выходе бло ка 28 и соответственно снижается степень поджатия пружины клапана 12. При этом уменьшается уровень давления в гидролиниях 3 и 5, а следовательно, и сила заглубления, воздействующая на РО. Благодаря этому компенси- руется увеличение буксования из-за снижения запаса по сцеплению (фиг.1), и мощность заглубления поддерживается на оптимальном уровне. Предельный уровень сигнала на выходе блока 28 и предельные значения поджатия пружины клапана 12 устанавливаются заранее путем предварительных экспериментов в соответствии с весовыми параметрами ЗТМ.
Режим Плавающее положение осу- 1ществляется смещением золотника гид- фораспределителя 7 влево до упора. При этом полости гидроцилиндров сообщаются между собой и сливной гидроли- нией 4 через проточки 16 и .Гидронасос 2 разгружается через клапан 8, камера 9 которого соединяется гидролинией 4 через гидролинию 26,проточ- ку 19 и сверление 22.
, JQ30
709410
Таким образом, изменение с по- , мощью данного гидропривода напорного давления в режиме начального заглубления РО в соответствии с изменением полезной силовой загрузки ЗТМ повышает эффективность работы машины.
Формула изобретения
Гидропривод рабочего органа земле- ройно-транспортной машины по авт.св. № 1392214, отли-чающийся тем, что, с целью повышения эффективности работы землеройно-транспортной машины за счет изменения напорного давления в гидроцилиндре управления рабочим органом на начальном этапе его заглубления в соответствии с изменением полезной силовой загрузки машины, он дополнительно снабжен датчиком текущего значения полезной силовой загрузки, блоком преобразова- ния в сигнал обратной полярности и исполнительным устройством, при этом выход датчика текущего значения полезной силовой загрузки через блок преобразования в сигнал обратной полярности подключен к входу исполнительного устройства, выход которого механически связан с пружиной переливного слапана.
15
20
25
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рабочим органом землеройно-транспортной машины и гидропривод для его осуществления | 1986 |
|
SU1392214A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| Гидравлическое устройство управления фрикционами гидромеханической коробки передач транспортного средства | 1982 |
|
SU1065258A1 |
| Устройство управления рабочим процессом землеройно-транспортной машины | 1986 |
|
SU1323672A1 |
| Система управления коробкой передач самоходной машины | 1984 |
|
SU1167049A1 |
| МАШИНА ДЛЯ РАЗРАБОТКИ ГОРНЫХ ПОРОД | 2019 |
|
RU2729656C1 |
| Система управления гидромеханической трансмиссией | 1988 |
|
SU1549806A1 |
| Бульдозер | 1985 |
|
SU1330274A1 |
| Устройство блокировки переключения передач транспортного средства (его варианты) | 1982 |
|
SU1087377A1 |
Изобретение предназначено для управления бульдозерным рабочим органом (РО) землеройно-транспортной машины в процессе разработки грунта при наличии широкого спектра внешних нагрузок. Цель изобретения - повышение эффективности работы машины за счет изменения напорного давления в гидроцилиндре управления РО на на
pi гхоп
Ј&Z./
Коп.
| Способ управления рабочим органом землеройно-транспортной машины и гидропривод для его осуществления | 1986 |
|
SU1392214A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
