Изобретение относится к машиностроению и может быть использовано в высокооборотных опорах качения высокоточных приборов.
Цель изобретения - уменьшение гистерезисных потерь на трение путем выбора оптимальных параметров кривизны дорожек качения колец.
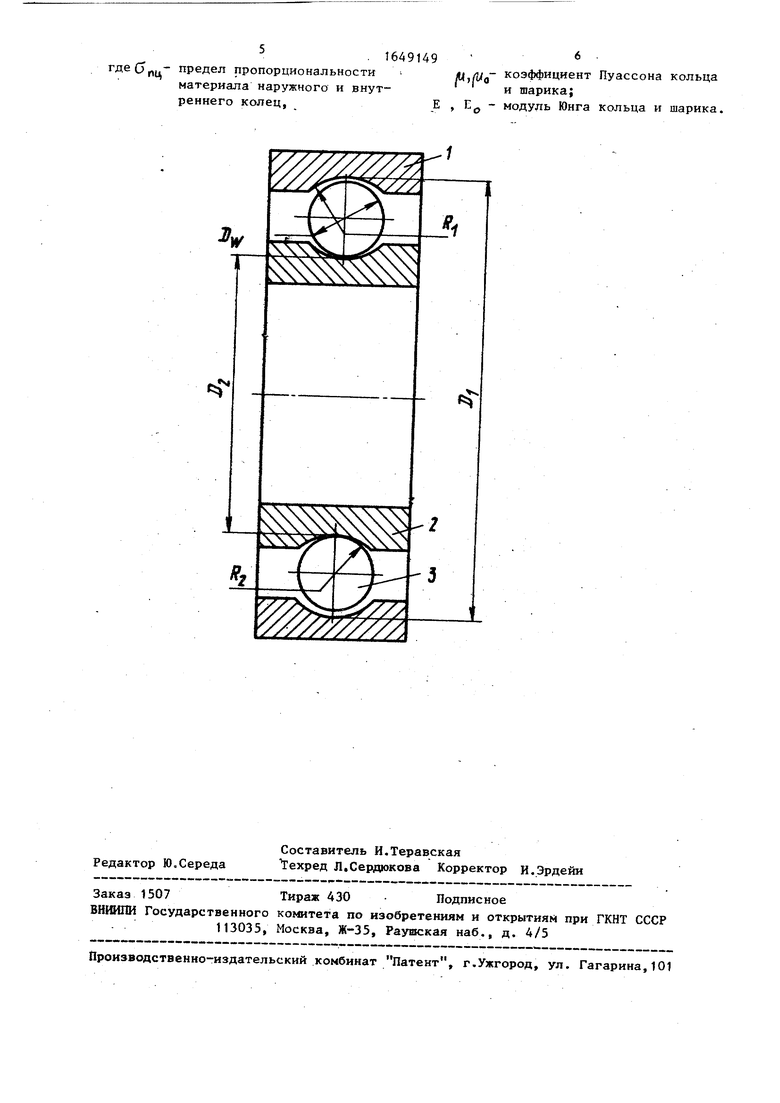
На чертеже схематично показан подшипник качения.
Подшипник качения содержит наружное колесо 1, внутреннее кольцо 2, шарики 3. Расчет кривизны дорожек качения колец и критерий упругости определяют следующим образом:
ft . 1,5ПЈ 3Ь2зГр Спц - - V Л| (
).Р
1 -& +
Е
l-iJtf
(О
(2)
Е
гдеС„и MHHJfr, ,); мин предел пропорциональности наименее упругого из деталей контактных пар, Н/мм2;
Е Eo - модули Юнга деталей подшипника, Н/ммг; ,,2. |У коэффициенты Пуас сона; Пр пр,)2 - константы Герца для
контактов;
,г
суммы главных кривизн и контактов; Р Р 1л - нагрузки в контактах.
Выражения (1) и (2) применяются для каждого из контактов наиболее нагруженного шарика.
Из уравнения (1) находим выражения для основного геометрического параметра подшипника
т
Я
За.
я
)
(3)
2
со
Ј
со
где п
м
It
/SW ТиУ
(4)
Выражение для главных кривизн в контактах имеет вид
4 ± 2 cos Об 1 (,. (1 - со sod) R v
где D D tg - диаметры по дну желоба;
R R - радиусы желобов. Для нахождения константы п« l/Cn.n) вводится промежуточная величина
« 2cos( 1 . , + о Ш-созоО R
рк
cosЈ ,
Радиусы желобов дорожек качения согласно (3), (4) и (5) определяются из соотношения
R ,2с ОС- 5нагруженного шарика.
((T::co) ТТ (6)ЗЛ-/М4 1 -/мД №лц
л|пр Р пм -г тт;г
Р - нагрузка в контакте наиб нагруженного шарика. L . „г
с
Радиусы кривизны дорожек качения выбираются из соотношения
R (4 т - 2cosoЈ п/и ч- D, (T-cos(y )
W
Л/l
гг
-Кp
0
5нагруженного шарика.
ЗЛ-/М4 1 -/мД №лц
где Пр - константа Герца;
Bty - диаметр шарика;
D - диаметр по дну дорожки качения;
R - радиус кривизны дорожки качения;
& - угол контакта;
Р - нагрузка в контакте наиболее нагруженного шарика. L . „г

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки дорожек качения колец подшипников шариками | 1982 |
|
SU1065156A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАЗОВОЙ СТАТИЧЕСКОЙ ГРУЗОПОДЪЕМНОСТИ ШАРИКОВОГО ПОДШИПНИКА КАЧЕНИЯ | 2007 |
|
RU2350920C1 |
| ШАРИКОПОДШИПНИК РАДИАЛЬНО-УПОРНЫЙ ДВУХРЯДНЫЙ И СПОСОБ ИЗМЕРЕНИЯ В ШАРИКОПОДШИПНИКЕ ОТКЛОНЕНИЯ УГЛА КОНТАКТА ОТ НОМИНАЛЬНОГО | 2002 |
|
RU2232310C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАЗОВОЙ ДИНАМИЧЕСКОЙ ГРУЗОПОДЪЕМНОСТИ ШАРИКОВОГО ПОДШИПНИКА КАЧЕНИЯ | 2010 |
|
RU2422793C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЗАДАННОГО ДОПУСКА УГЛА КОНТАКТА В ДВУХРЯДНЫХ РАДИАЛЬНО-УПОРНЫХ ШАРИКОПОДШИПНИКАХ | 2001 |
|
RU2244857C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАЗОВОЙ СТАТИЧЕСКОЙ ГРУЗОПОДЪЕМНОСТИ РОЛИКОВОГО ПОДШИПНИКА КАЧЕНИЯ | 2007 |
|
RU2350919C1 |
| Способ комплектования трехточечного шарикоподшипника | 1988 |
|
SU1590732A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПАРАМЕТРОВ ШАРИКОПОДШИПНИКА | 2014 |
|
RU2581414C1 |
| Шариковый подшипник | 2022 |
|
RU2778579C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАЗОВОЙ ДИНАМИЧЕСКОЙ ГРУЗОПОДЪЕМНОСТИ РОЛИКОВОГО ПОДШИПНИКА КАЧЕНИЯ | 2010 |
|
RU2422792C1 |
Изобретение относится к машиностроению н может быть использовано в высокооборотных опорах качения высокоточных приборов. Цель изобретения уменьшение гистерезисных потерь в рабочих зонах колец. Для этого радиусы дорожек качения колец выбираются из определенного соотношения. 1 ил.
которое является нелинейным уравнением относительно радиусов желобов.
Подставляя R R ; 0 04 DSL получим формулы для расчета радиусов желобов. Для радиуса желоба наружного кольца R 4
(Ь - 2cos06
1D D T2R7TT-cosoO
К Р Последние два выражения отличаютс
только индексами при величинах R.-D Пр. Поэтому расчеты проведены, ис ходя из формулы (6) по алгоритму,
Если при вычислениях в формуле (6) получается невязка, изменяем величины радиусов желобов до те.х пор, пока не будет достигнута требуемая точность вычисления.
При комбинированном нагружении в случае полного контактирования максимальная нагрузка Р на наиболее нагруженный шарик определяется по формуле
Fa
Z -sin ой
Fr .1 Z cosK2 c
+ q --:-Д- Р,.со
8,М.
(7) 45
где F,,, F,, - осевая и радиальная нагрузки соответственно, Н|
Z - число шариков;
F - центробежная сила Htonpe-vQ деляемая по формуле
Рц 2,3..dwDj,,n5,f н (8)
обозначено
«- --з5 -8). S5
Jw
где D, Dg -диаметры по дну дорожек качения.
5
где(70 - предел пропорциональности
материала, выбранный как минимальный из соответствующих пределов пропорциональности шарика и кольца; FO t F p - осевая и радиальная нагрузка
на подшипник; Z - число шариков; |U,/Ue - коэффициент Пуассона кольца
и шарика;
Е, Е - модули Юнга кольца и шарика; Гц - центробежная сила, действующая на шарик.
Формула изобретения
Подшипник качения, содержащий наружное и внутреннее кольца с дорожками качения и размещенные между ними тела качения в виде шариков с двумя пятнами контакта с каждой дорожкой качения, отличающийся тем, что, с целью уменьшения гисте- резисных потерь на трение, радиусы дорожек качения колец выбраны из соотношения
„ Г4 .2cosXn« |-(
к st I «- ТГ ---- - - I
±2R(1-cosod) ;
где Пр - константа Герца; D-д, - диаметр шарика; D - диаметр, дна дорожки качения; R - радиус дорожки качения; 06 - угол контакта , Р - статическая грузоподъемность;1.2
п - з,1 ГГ + , /jtoW,
ПМ 2( ЕЕб 1 175
где(5Пц- предел пропорциональности
/И,/И
- коэффициент Пуассона кольца
материала наружного и внут- и шарика;
реннего колец,Е , Е0 - модуль Юнга кольца и шарика.
%Ј
ЈШ
1649149
/И,/И
- коэффициент Пуассона кольца
и шарика;
| Упорный шариковый подшипник с четырехточным контактом | 1973 |
|
SU561815A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
