Изобретение относится к машиностроению, а именно к средствам гашения колебаний механизмов.
Целью изобретения является повышение эффективности гашения колебаний.
Указанная цель достигается за счет перераспределения энергии колебаний механизма по диапазону рабочих частот.
На фиг. 1 показана амплитудно-частотная характеристика (АЧХ) колебаний механизма до реализации способа подавления колебаний,на фиг.2-АЧХ колебаний механиз мз при использовании способа подавления колебаний,на фиг.З-схема устройства для реализации способа при периодическом изменении жесткостного параметра,1 на фиг. 4 - сечение А-А на фиг. 3; на фиг. 5 - схема устройства дл 1 реализации способа при периодическом изменении инерционного параметра; на фиг. 6 - виб Б на фиг. 5.
Способ подавления резонансных колебаний механизмов заключается в том, что периодически изменяют иди жеткостный, или инерционный параметр механизма с частотой, в 1,7 - 1,9 раза большей частоты внешнего вибрационного воздействия,- и амплитудой, определяемой соотношением
У - Г g Qfep Qfr . АР ( Mo ч2 t - ° /,и- - «с: дтг v тггкт:)
(D
Уср - 0)ск
где S ,75...1,5 - при изменении жесткостного параметра или
S 1пр.
С 0,55.,1,1 - при изменении инерционного параметра;
ЈОср.(Уск,ЈОр - соответственно частоты срыва, обратного скачка и внешнего вибрационного воздействия;
Ар - амплитуда резонансных колебаний механизма на частоте а)р при и 0;
Mo - амплитуда внешнего вибрационного воздействия;
ACT деформация механизма при действии статической нагрузки Л/Ц
Аск - амплитуда нерезонансных колебаний, соответствующая частоте обратного скачка;
KI - величина номинального жесткогт- ного параметра;
Пр - величина номинального инерционного параметра механизма,
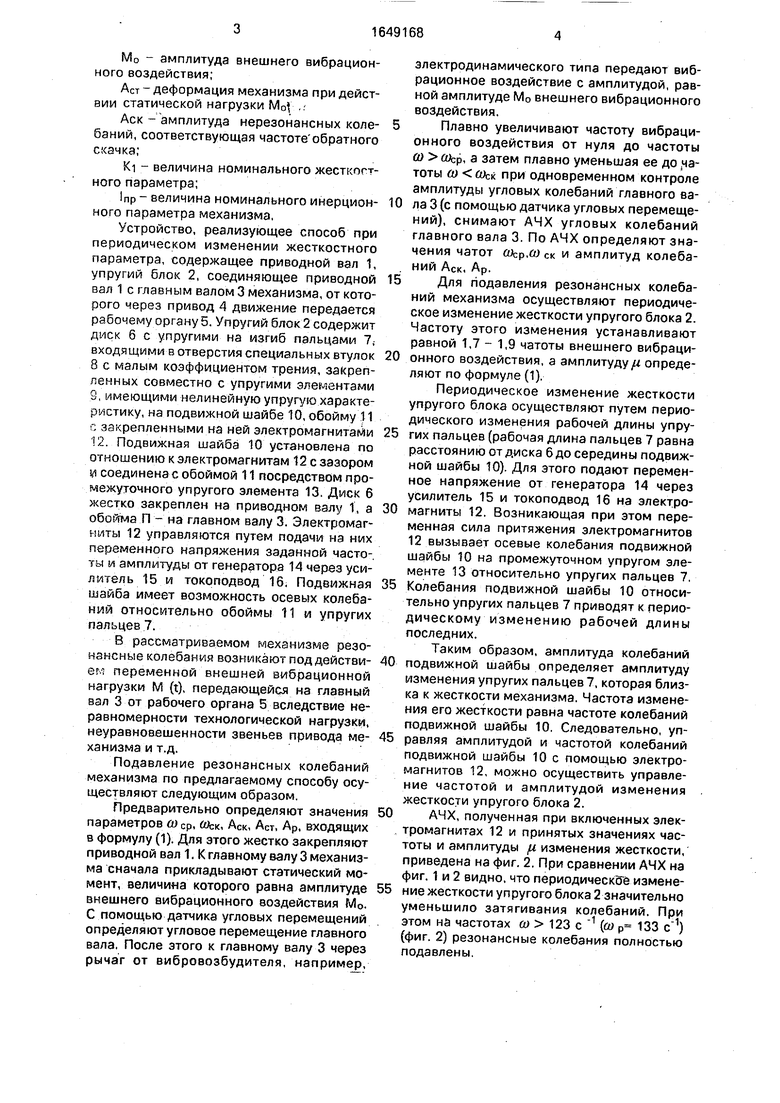
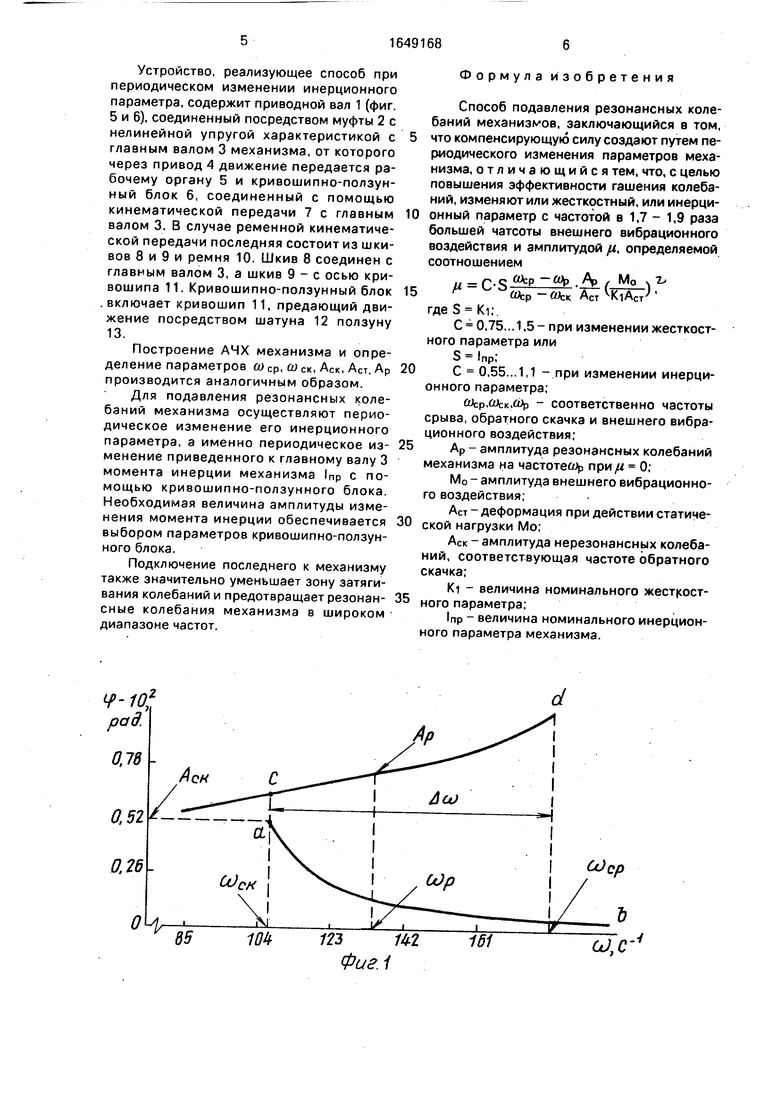
Устройство, реализующее способ при периодическом изменении жесткостного параметра, содержащее приводной вал 1, упругий блок 2, соединяющее приводной вал 1 с главным валом 3 механизма, от которого через привод 4 движение передается рабочему органу 5. Упругий блок 2 содержит диск 6 с упругими на изгиб пальцами 7, входящими в отверстия специальных втулок 8 с малым коэффициентом трения, закрепленных совместно с упругими элементами 3, имеющими нелинейную упругую характеристику, на подвижной шайбе 10, обойму 11 z закрепленными на ней электромагнитами 12. Подвижная шайба 10 установлена по отношению к электромагнитам 12с зазором у соединена с обоймой 11 посредством промежуточного упругого элемента 13. Диск 6 жестко закреплен на приводном валу 1, а обойма П - на главном валу 3. Электромагниты 12 управляются путем подачи на них переменного напряжения заданной частоты т амплитуды от генератора 14 через усилитель 15 и токоподвод 16. Подвижная шайба имеет возможность осевых колебаний относительно обоймы 11 и упругих пальцев 7.
В рассматриваемом механизме резонансные колебания возникают под действием переменной внешней вибрационной нагрузки М (t), передающейся на главный вал 3 от рабочего органа 5 вследствие неравномерности технологической нагрузки, неуравновешенности звеньев привода механизма и т.д.
Подавление резонансных колебаний механизма по предлагаемому способу осуществляют следующим образом.
Предварительно определяют значения параметров о Ср, ftfc, АСк, Ает, Ар, входящих в формулу (1). Для этого жестко закрепляют приводной вал 1. К главному валу 3 механизма сначала прикладывают статический момент, величина которого равна амплитуде внешнего вибрационного воздействия М0. С помощью датчика угловых перемещений определяют угловое перемещение главного вала. После этого к главному валу 3 через рычаг от вибровозбудителя, например,
электродинамического типа передают вибрационное воздействие с амплитудой, равной амплитуде М0 внешнего вибрационного воздействия.
Плавно увеличивают частоту вибрационного воздействия от нуля до частоты (О а)ср, а затем плавно уменьшая ее до ча- тоты О) сУск при одновременном контроле амплитуды угловых колебаний главного валаЗ(с помощью датчика угловых перемещений), снимают АЧХ угловых колебаний главного вала 3. По АЧХ определяют значения чатот (Оср.о) ск и амплитуд колебаний Аск, Ар.
Для подавления резонансных колебаний механизма осуществляют периодическое изменение жесткости упругого блока 2. Частоту этого изменения устанавливают равной 1,7 - 1,9 чатоты внешнего вибрационного воздействия, а амплитуду ju определяют по формуле (1).
Периодическое изменение жесткости упругого блока осуществляют путем периодического изменения рабочей длины упругих пальцев (рабочая длина пальцев 7 равна расстоянию от диска 6 до середины подвижной шайбы 10). Для этого подают переменное напряжение от генератора 14 через усилитель 15 и токоподвод 16 на электромагниты 12. Возникающая при этом переменная сила притяжения электромагнитов 12 вызывает осевые колебания подвижной шайбы 10 на промежуточном упругом элементе 13 относительно упругих пальцев 7.
Колебания подвижной шайбы 10 относительно упругих пальцев 7 приводят к периодическому изменению рабочей длины последних.
Таким образом, амплитуда колебаний
подвижной шайбы определяет амплитуду изменения упругих пальцев 7, которая близка к жесткости механизма. Частота изменения его жесткости равна частоте колебаний подвижной шайбы 10. Следовательно, управляя амплитудой и частотой колебаний подвижной шайбы 10 с помощью электромагнитов 12, можно осуществить управление частотой и амплитудой изменения жесткости упругого блока 2.
АЧХ, полученная при включенных электромагнитах 12 и принятых значениях частоты и амплитуды /л изменения жесткости, приведена на фиг. 2, При сравнении АЧХ на фиг. 1 и 2 видно, что периодическое измене5 ние жесткости упругого блока 2 значительно уменьшило затягивания колебаний. При этом на частотах (О 123 с 1 (ш р 133 ) (фиг. 2) резонансные колебания полностью подавлены.
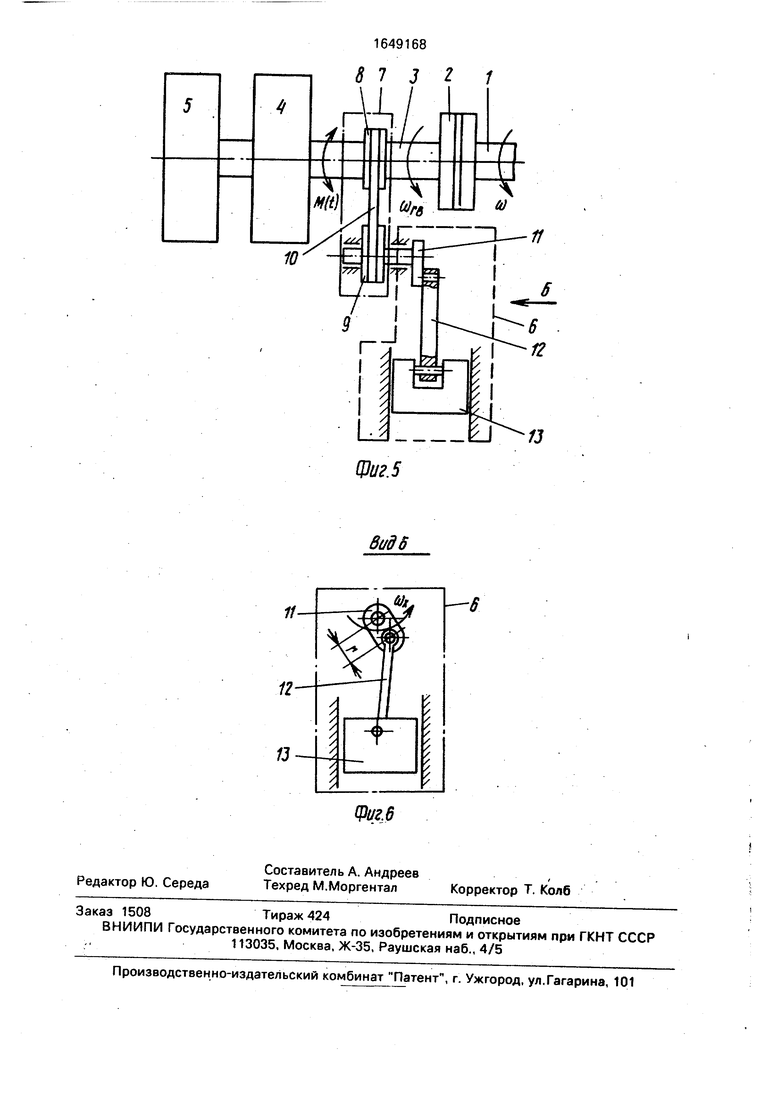
Устройство, реализующее способ при периодическом изменении инерционного параметра, содержит приводной вал 1 (фиг. 5 и 6), соединенный посредством муфты 2 с нелинейной упругой характеристикой с главным валом 3 механизма, от которого через привод 4 движение передается рабочему органу 5 и кривошипно-ползун- ный блок 6, соединенный с помощью кинематической передачи 7 с главным валом 3. В случае ременной кинематической передачи последняя состоит из шкивов 8 и 9 и ремня 10. Шкив 8 соединен с главным валом 3, а шкив 9 - с осью кривошипа 11. Кривошипно-ползунный блок .включает кривошип 11, предающий движение посредством шатуна 12 ползуну 13.
Построение АЧХ механизма и определение параметров (1)Ср, Ш ск, Аск, ACT. Ар производится аналогичным образом.
Для подавления резонансных колебаний механизма осуществляют периодическое изменение его инерционного параметра, а именно периодическое из- менение приведенного к главному валу 3 момента инерции механизма 1Пр с помощью кривошипно-ползунного блока. Необходимая величина амплитуды изменения момента инерции обеспечивается выбором параметров кривошипно-ползунного блока.
Подключение последнего к механизму также значительно уменьшает зону затягивания колебаний и предотвращает резонан- сные колебания механизма в широком диапазоне частот.
Формула изобретения
Способ подавления резонансных колебаний механизмов, заключающийся в том, что компенсирующую силу создают путем периодического изменения параметров механизма, отличающийся тем, что, с целью повышения эффективности гашения колебаний, изменяют или жесткрстный, или инерционный параметр с частотой в 1.7 - 1,9 раза большей чатсоты внешнего вибрационного воздействия и амплитудой ft, определяемой соотношением
- г с а)Р А s MQ
Р ufcp-UJbc AcT KiACT где S Ki;.
С 0,75... 1,5 - при изменении жесткост- ного параметра или
S Inp;
С 0,55...1,1 - при изменении инерционного параметра;
Уср,Иск, - соответственно частоты срыва, обратного скачка и внешнего вибрационного воздействия;
Ар - амплитуда резонансных колебаний механизма на частотешр при/ 0;
Мо - амплитуда внешнего вибрационного воздействия;
ACT - деформация при действии статической нагрузки Мо;
Аск - амплитуда нерезонансных колебаний, соответствующая частоте обратного скачка;
Ki - величина номинального жесткост- ного параметра;
Inp - величина номинального инерционного параметра механизма.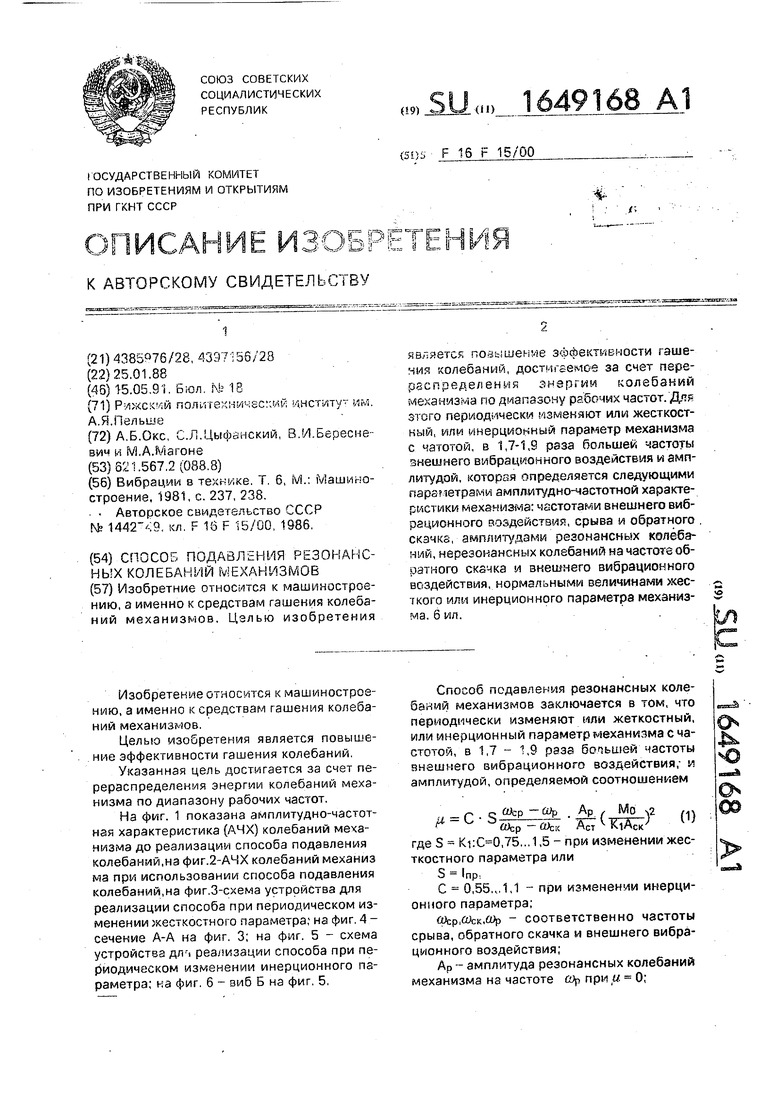
Изобретите относится к машиностроению, а именно к средствам гашения колебаний механизмов. Целью изобретения является повышение эффективности гашения колебаний, достигаемое за счет перераспределения энергии колебаний механизма по диапазону рабочих частот. Дя этого периодически изменяют или жесткост- кый, или инерционный параметр механизма с чатотой, в 1,7-1,9 раза большей частоты знешнего вибрационного воздействия и амплитудой, которая определяется следующими параметрами амплитудно-частотной характеристики механизма: частотами внешнего вибрационного воздействия, срыва и обратного . скэчкг, амплитудами резонансных колебаний, нерезокансных колебаний на частоте обратного скачка и внешнего вибрационного воздействия, нормальными величинами жесткого или инерционного параметра механизма. 6 ил.
65
10
123 т ФигЛ
CJ.C
.1
V-fO рад
0,52
0.26 О
25 1Qb 123 Ш 161
Фае. 2
16
WfeJ
(л), С
-/
107
11
- А § 8 7
А-А
Щиг4
| Вибрации в технике | |||
| Т | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Прибор для корчевания пней | 1921 |
|
SU237A1 |
| Прибор для срезания шпилек в обуви | 1923 |
|
SU1442A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
