Изобретение относится к машиностроению и может быть использовано для контроля параметров вибрационного поля вибрационных технологических машин.
Вибрационные технологические машины или вибрационные стенды широко используются в различных отраслях промышленности, с помощью вибростендов и вибрационных транспортеров реализуются процессы перемещения сыпучих сред, классификации, сортировки и перемешивания различных материалов. В последние годы значительное распространение получили технологические процессы вибрационного упрочнения деталей, поверхность которых взаимодействует с сыпучей рабочей средой [1-3]. Во многих случаях необходимой является соответствующая настройка в распределение амплитуд колебаний отдельных точек по длине рабочего органа вибростенда. Такое распределение параметров рабочего органа рассматривается как вибрационное поле. Такие формы движения вибростенда создаются различного рода вибровозбудителями, которые определенным образом входят в структуру механической колебательной системы, рассматриваемой как расчетная схема вибростенда. Возможные варианты конструктивно-технического исполнения, таких технологических машин представлены, в частности в работе [4]. В вибростендах, ориентированных на формирование одномерных вибрационных полей, обычно используются вибровозбудители инерционного типа, что связано с выделением определенных мест расположения вибровозбудителя и использованием соответствующей системы поднастройки параметров вибростенда.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известен способ гидродинамического возбуждения колебаний и вибрационная машина с гидродинамическим возбудителем колебаний [Никифоров А.Н., Шохин А.Е. «Способ гидродинамического возбуждения колебаний и вибрационная машина с гидродинамическим возбудителем колебаний», патент №2589460 С1, МПК В06В 1/16, приоритет 10.07.2016], заключающийся в создании резонанса тела путем вращения дисбаланса, отличающийся тем, что в нем используют в качестве источника вибрации обратную уединенную волну, образующуюся при вращении жидкостного дисбаланса, который вращают синхронно с собственным прецессионным движением ротора и регулируют количеством жидкости в зависимости от собственной частоты вращения ротора по формуле:
где ω- частота вращения ротора, R - радиус ротора, h - толщина слоя жидкости при вращении, Ω. - низшая собственная частота ротора с жидкостью.
Вибрационная машина с гидродинамическим возбудителем колебаний, содержащая станину, подрессоренный контейнер с установленным на нем вращающимся дисбалансом, отличающаяся тем, что в ней дисбаланс выполнен в виде полого цилиндрического резервуара, частично заполненного жидкостью, при этом масса жидкости в резервуаре зависит от параметров вибрационной машины и частоты вращения ротора и соответствует следующим условиям:

где М - масса загруженной вибрационной машины с пустым резервуаром, w0 -масса жидкости, необходимая для полного заполнения резервуара, R и L -внутренние радиус и длина резервуара, h - толщина слоя жидкости при вращении, ω - частота вращения резервуара,  - f низшая собственная частота подрессоренной части вибрационной машины, m - масса жидкости, залитой в резервуар при вращении дисбаланса.
- f низшая собственная частота подрессоренной части вибрационной машины, m - масса жидкости, залитой в резервуар при вращении дисбаланса.
Недостатком данного изобретения является отсутствие возможности автоматического регулирования вибрационного воздействия.
Известно изобретение [Серга Г.В., Резниченко С.М. «Вибрационная установка для обезвоживания сыпучих материалов», патент №2591959 С1, МПК B01D 33/03, B01D 35/20, приоритет 20.07.2016], содержащая смонтированный на основании фильтр, загрузочное приспособление, разгрузочные приспособления для отвода фильтра и сгущенной фракции, фильтр упруго установлен на платформе с вибратором, смонтированным горизонтально под платформой, и выполнен спиральным из пустотелого перфорированного тоннеля с многозаходной винтовой перфорированной поверхностью по периметру свернутого по спиральной оси вокруг центральной прямолинейной оси спирального фильтра, снабженного винтовыми канавками внутри под углом к его спиральной оси в виде карманов криволинейной формы с центрами кривизны, расположенными внутри поперечного сечения пустотелого перфорированного тоннеля, и собран из секций в виде одинаковых по форме и размерам перфорированных колец, свернутых из одинаковых перфорированных полос ромбовидной формы, на которых размещены трапеции, боковые струны которых расположены на боковых сторонах ромбовидной перфорированной полосы, а верхние и нижние основания трапеции расположены под острым углом к оси симметрии ромбовидной перфорированной полосы и являются линиями сгиба, находящихся на расстояниях друг от друга, равных длине карманов криволинейной формы по внутренней перфорированной поверхности перфорированного пустотелого тоннеля спирального фильтра, при этом секции в виде колец соединены друг с другом боковыми сторонами трапеций. Техническим результатом изобретения является повышение производительности и расширение технологических возможностей вибрационной установки.
К недостаткам данного изобретения можно отнести использование только одного вибрационного возмущения при работе вибрационной технологической машины и отсутствие возможности регулирования интенсивности вибрационного воздействия.
Также известно изобретение [Елисеев С.В., Елисеев А.В., Каимов Е.В., Нгуен Д.Х., Выонг К.Ч. «Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления», патент №2624757 С1, МПК F16F 15/02, приоритет 06.07.2017], представляющее собой способ, включающий рабочий орган в виде твердого тела на упругих элементах, имеющий инерционный вибровозбудитель, действующий в определенной точке, отличающийся введением в конструктивно-техническую схему системы устройства для преобразования движения в виде несамотормозящегося винтового механизма с гайкой-маховиком с перемещением вдоль рабочего органа точки приложения усилия, возникающего при работе элементов винтовой пары, генерирующей дополнительные стабилизирующие движения рабочего органа таким образом, чтобы вибрационное поле имело однородную структуру и обеспечивало возможности регулирования и настройки вибрационной системы для реализации необходимых параметров технологического процесса.
Устройство, реализующее способ, представляет собой конструктивно-технический блок, состоящий из винтового несамотормозящегося механизма с массивной гайкой-маховиком, на торцевой части которой может быть создан момент сил путем прижатия тормозной колодки специальным приводом, что генерирует управляющее воздействие в определенной точке рабочего органа вибростенда; устройство для преобразования движения также отличается тем, что точка приложения усилия на рабочий орган может изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов, обеспечивающих перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов, управляемого специальным программным блоком, в который для расчетов по заложенной математической модели поступает информация с датчиков, контролирующих вибрационное состояние и системы.
К недостаткам данного изобретения можно использование только одного вибрационного возмущения при работе технологической машины и сложность конструкции представленного технического решения.
В качестве прототипа выбирается изобретение [Антипов В.И., Антипова Р.И., Руин А.А. «Способ возбуждения резонансных механических колебаний и устройство для его осуществления», патент №2486017 С1, МПК В06В 1/16, приоритет 27.06.2013], представляющее собой способ, заключающийся в том, что резонансные колебания возбуждают за счет периодического принудительного изменения инерционных параметров колебательной системы, образованной рабочим органом общей массой М1 на упругой подвеске и параметрическим вибровозбудителем, включающим ротор с беговыми дорожками в нем и телами качения в них, осуществляют упругую подвеску рабочего органа в двух взаимно перпендикулярных направлениях по осям X, Y, производят настройку колебательной системы, задавая жесткость упругой подвески и частоту вращения ротора, отличающийся тем, что вводят реактивную массу М2, соединенную с массой М1 при помощи упругой системы с жесткостями Сх, Су, и возбуждают поступательные резонансные противофазные колебания масс М2и М2 с реализацией синергетического эффекта системы в целом, настройку колебательной системы производят, задавая жесткость упругой системы между массами М1 и М2, угловые скорости ротора вибровозбудителя ω обкатки Ω, собственную частоту колебаний тел качения λ1, которые выбирают из соотношений

где С=(Сх+СУ)/2 - усредненная жесткость упругой системы, Мпр=M1М2(М1+М2) - приведенная масса системы, v - безразмерный параметр, определяющий собственную частоту тел качения.
Устройство для возбуждения резонансных механических колебаний, содержащее колебательную систему в виде соединенного с основанием упругими связями рабочего органа общей массой Mt и установленного на нем параметрического вибровозбудителя, в котором на валу электродвигателя закреплен уравновешенный ротор с парой незамкнутых круговых беговых дорожек, расположенных симметрично относительно двух взаимно перпендикулярных его диаметров, их центры смещены от оси вращения ротора на одинаковые расстояния в сторону беговой дорожки, а в беговых дорожках размещены одинаковые уравновешенные тела качения, ротор выполнен из набора одинаковых дисков, в смежных дисках оси обкатки тел качения повернуты вокруг оси вращения ротора на одинаковый угол γ=π/S, где S - число дисков одного ротора, а колебательная система выполнена с возможностью перемещения рабочего органа по осям X и Y, отличающееся тем, что введена реактивная масса М2, соединенная с рабочим органом и основанием упругими связями, рабочий орган снабжен, по меньшей мере, двумя полыми цилиндрами, которые размещены на нем симметрично относительно оси вращения ротора, а в полости цилиндров свободно вложены цилиндрические ролики с возможностью обкатки внутри полостей.
Основным недостатком данного изобретения является отсутствие возможности регулирования параметров генерируемого вибрационного воздействия на счет формирования разных возмущающих частот при помощи вибровозбудителя и циллиндров.
Задачей изобретения является управление структурой и параметрами вибрационного поля за счет изменения соотношения между силовыми вибрационными воздействиями, приложенными к рабочему органу технологической машины.
Способ управления формированием структуры и параметров вибрационного поля технологической вибрационной машины, включающий возбуждение рабочего органа вибрационной машины с помощью вибровозбудителя инерционного типа и осуществляют контроль за динамическим состоянием рабочего органа датчиками вибрации, отличающийся тем, что вибрационное возбуждение осуществляют двумя вибровозбудителями инерционного типа, при этом обеспечивают их работу на одной частоте гармонических колебаний в проти-вофазе или синфазно путем создания соотношения между амплитудами инерционных сил, определяемых радиусами установки дисбалансов, при этом получают вибрационные поля необходимой формы и параметров при выборе соответствующего коэффициента связности внешних воздействий, определяемого по формуле:
Q2=α⋅Q1
где Q1, Q2 - силовые внешние возмущения, α - действительное число, принимающие отрицательные, нулевые и положительные значения.
Предлагаемый способ формирования одномерного вибрационного поля и управления его параметрами отличается особенностями, которые заключаются в использовании динамических эффектов, возникающих в совместной работе двух вибрационных возбудителей, создающих синфазные гармонические силовые воздействия при возможностях изменения соотношения между создаваемыми инерционными силами, что достигает путем соответствующих изменений эксцентриситетов вращающихся масс (неуравновешенностей).
Сущность предлагаемого способа поясняется чертежами.
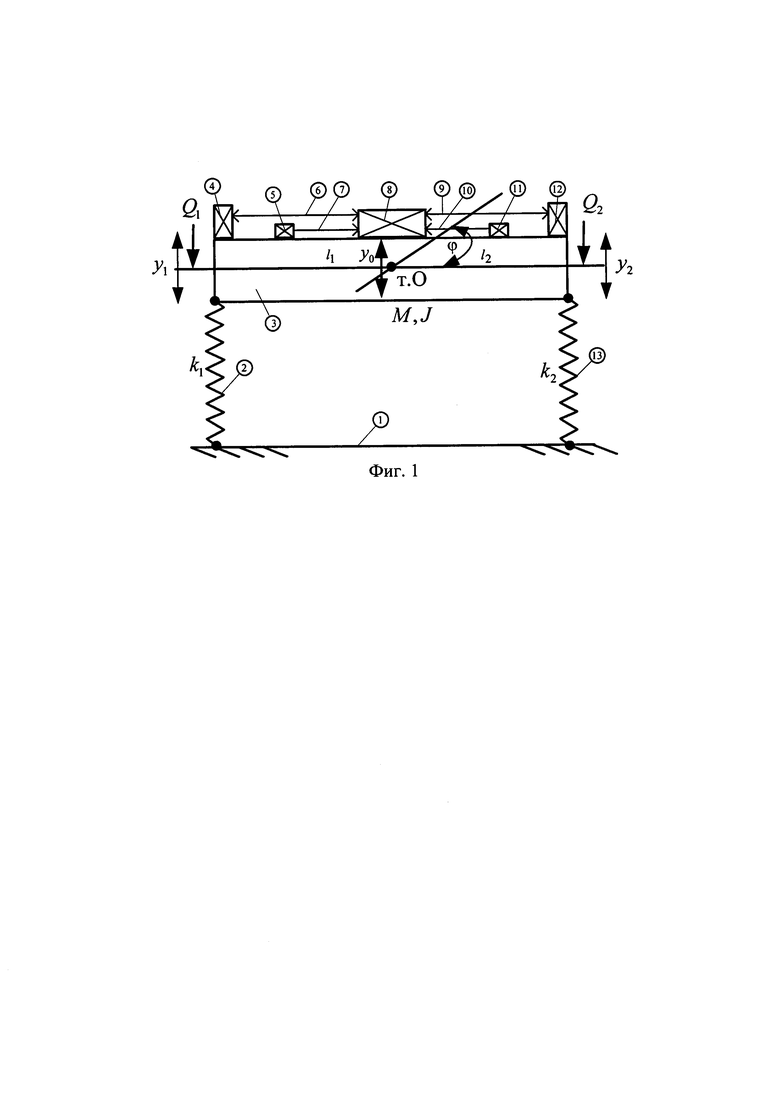
Принципиальная схема системы, обеспечивающей формирование структуры вибрационного поля и параметров технологической вибрационной машины, приведена на фиг. 1. Представленная схема вибростенда содержит: инерционные возбудители вибраций 4, 12, создающие вертикальные силовые возмущения, рабочий орган 3, рассматриваемый как твердое тело массой М и моментом инерции J относительно центра тяжести (т.О). Положение (т.О) определяется длинами плеч  и связанный с опорной поверхностью 1 двумя упругими элементами 2 и 13 с соответствующими коэффициентами жесткости k1 и k2. Информация о движениях рабочего органа передается от датчиков 5, 11 через коммуникации 7, 10 в управляющий блок 8. Управляющий блок 8 соединен с вибровозбудителями 4 и 12 при помощи коммуникаций 6 и 9 соответственно.
и связанный с опорной поверхностью 1 двумя упругими элементами 2 и 13 с соответствующими коэффициентами жесткости k1 и k2. Информация о движениях рабочего органа передается от датчиков 5, 11 через коммуникации 7, 10 в управляющий блок 8. Управляющий блок 8 соединен с вибровозбудителями 4 и 12 при помощи коммуникаций 6 и 9 соответственно.
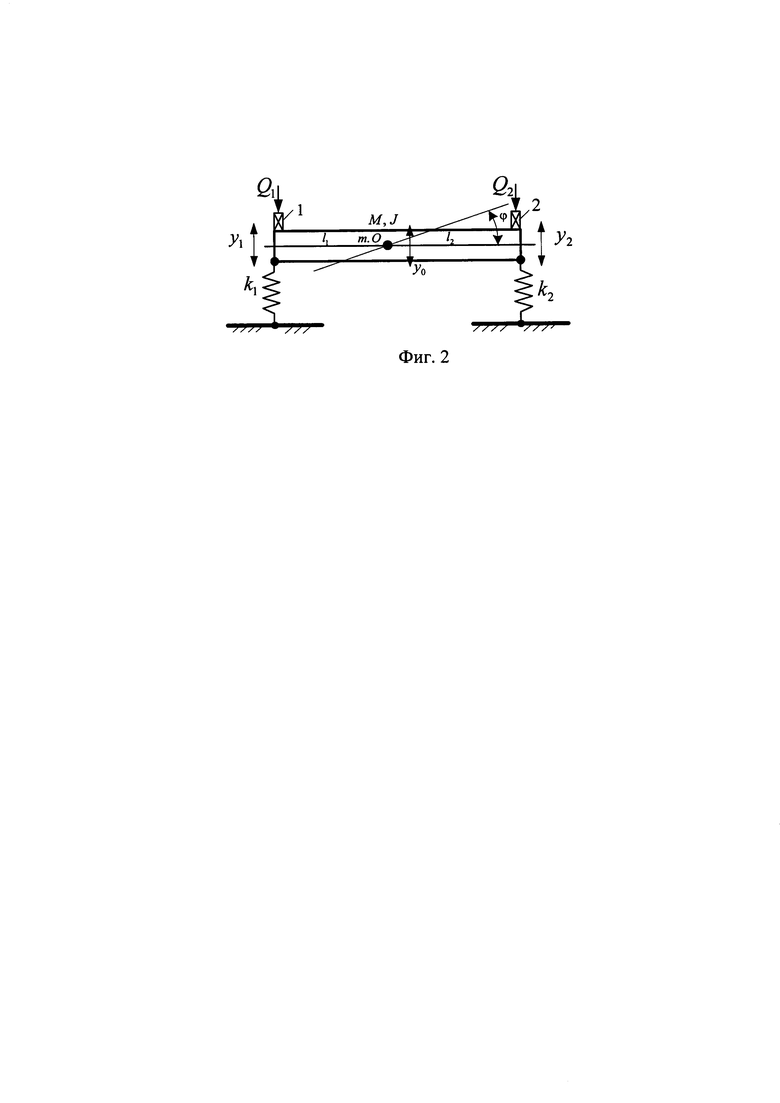
Упрощенная схема системы, отражающая основные свойства исходной системы, приводится на фиг. 2.
Структурная математическая модель исходного объекта приводится на фиг. 3.
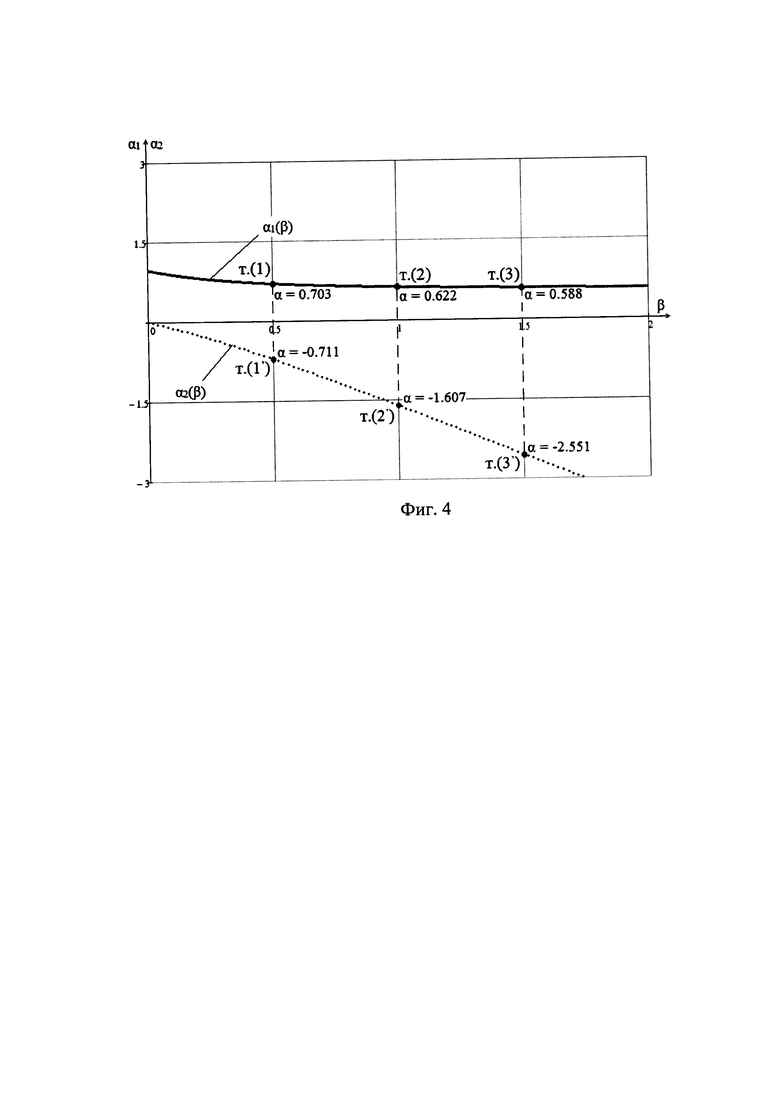
На фиг. 4 показаны графики зависимостей α1(β), α2(β).
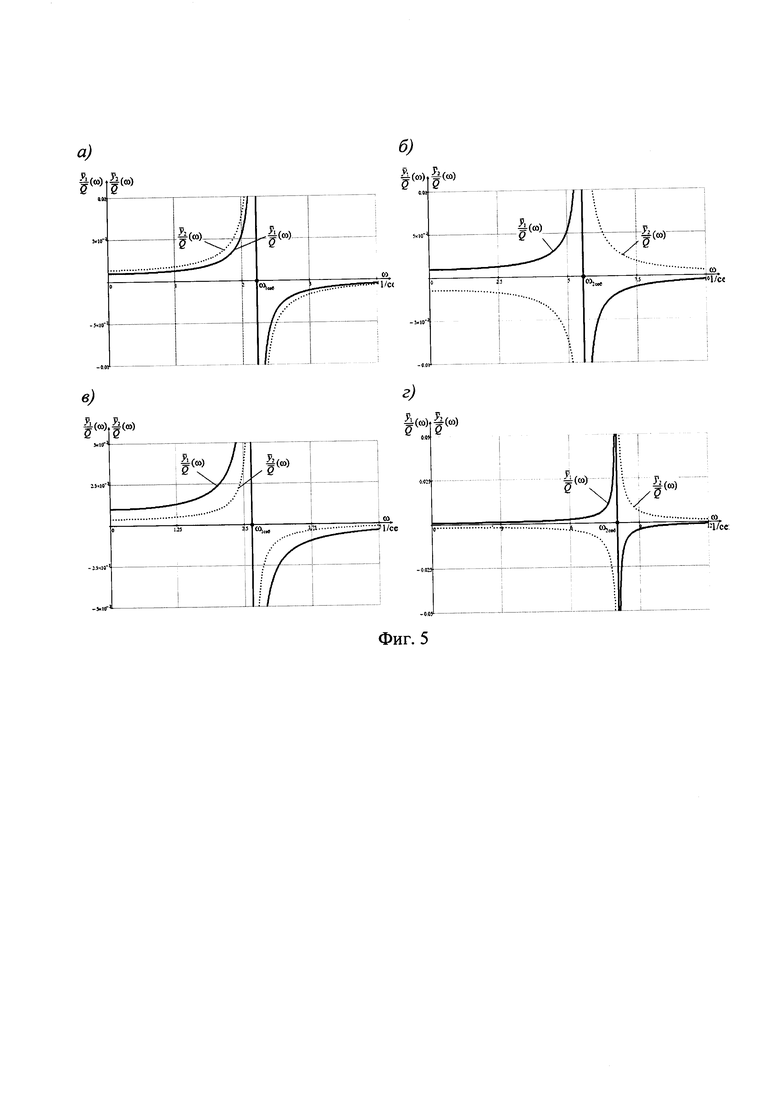
На фиг. 5, а - г приведены амплитудно-частотные характеристики  и
и  при различных сочетаниях параметров.
при различных сочетаниях параметров.
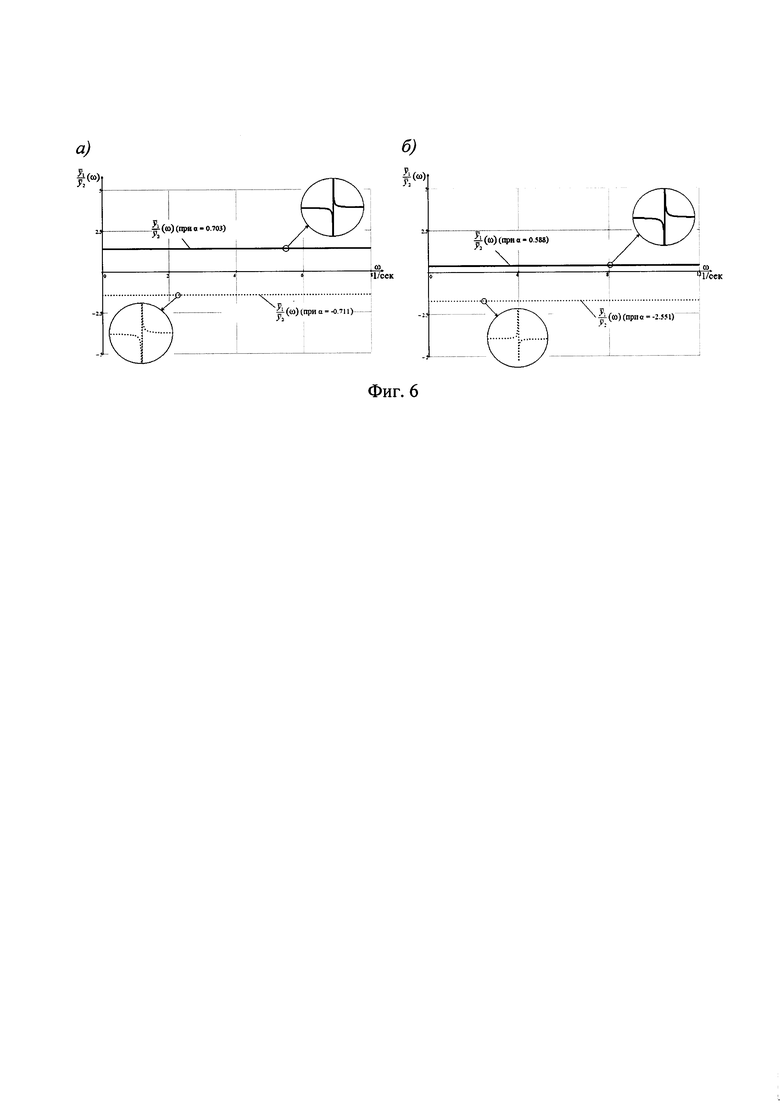
На фиг. 6 приводятся АЧХ межпарциальных связей.
Сущность предлагаемого изобретения заключается в следующем.
Предлагаемая система, в которой осуществляется управление процессом формирования вибрационного поля и необходимого изменения его параметров, представляет собой механическую колебательную систему с двумя степенями свободы.
Вибрационные движения рабочего органа 3 создаются работой вибровозбудителей 4, 11, установленных на концах рабочего органа. Положение рабочего органа 3 определяется координатами у1 и у2, характеризующих движения в точках предложения сил Q1, Q2, создаваемых вибровозбудителями 4, 12. Положение рабочего органа 3 также может быть описано в координатах γ0 и ϕ, определяющих положение центра тяжести и угол поворота твердого тела относительно центра тяжести.
Информация о движениях рабочего органа передается от датчиков 5, 11 через коммуникации 7, 10 в управляющий блок 8. Управляющий блок 8 одновременно обеспечивает обработку сигналов от измерительной системы, имеет микропроцессор, с помощью которого определяются соответствующие настроечные параметры настройки, в данном случае представляющие собой параметры функциональный связности между амплитудами силовых возмущений в виде коэффициента связности внешних возмущений. Такой коэффициент является вещественной величиной, которое может принимать положительные, нулевые и отрицательные значения. Управляющий блок 8 контролирует рабочие параметры вибровозбудителей 4, 12.
Управляющий блок может быть выполнен упрощенный вариант, когда им выдается сигнал о необходимости настройки вибровозбудителей 4, 12. Кроме того возможно создание более сложного устройства, способного поддерживать необходимые параметры вибрационного поля в автоматическом режиме.
При соответствующем выборе коэффициента связности амплитуд возможно получение однородных вибрационных полей с постоянной амплитудой, а также полей с центром качания как на рабочем органе так и за его пределами. Подробное описание математического моделирования и анализ графиков амплитудно-частотных характеристик приведены в теоретическом обосновании изобретения.
Теоретическое обоснование
I. Некоторые общие положения.
I. Математическая модель системы может быть построена на основе использования уравнения Лагранжа 2-го рода при использовании известных приемов [5]. Положение системы описывается в координатах у1 и у2, связанных с неподвижным базисом.
Математическая модель имеет вид системы из двух обыкновенных дифференциальных уравнений 2-го порядка с постоянными коэффициентами, что после преобразований Лапласа при нулевых начальных условиях может быть интерпретировано структурной математической моделью в виде структурной схемы, эквивалентной в динамическом отношении системы автоматического управления. Структурная математическая модель (фиг. 3) исходного объекта:  - комплексная переменная; значок «-» над переменными означает их изображение по Лапласу [6].
- комплексная переменная; значок «-» над переменными означает их изображение по Лапласу [6].
Силовые возмущения являются гармоническими воздействиями одной частоты; при этом полагается, что между Q1 и Q2 имеется связность, определяемая выражением

где α является действительным числом, принимающим отрицательные, нулевые и положительные значения.
II. Оценка динамических свойств системы при одновременном действии двух силовых возмущений. Полагая, что вибровозбудитель 4 (фиг. 2) обладает постоянными параметрами, а вибровозбудитель 12 (фиг. 2) имеет возможности изменения коэффициента связности α, запишем передаточные функции системы 

где

является частотным характеристическим уравнением системы;
 - расстояния от центра тяжести до точек приложения сил.
- расстояния от центра тяжести до точек приложения сил.
При возбуждении колебаний одним вибровозбудителем в системе возможен только один режим динамического гашения колебаний. Связность внешних воздействий через коэффициент α может влиять на режимы динамического гашения колебаний по координатам  Для оценки возможных форм проявления динамических эффектов может быть использована передаточная функция межпарциальных связей
Для оценки возможных форм проявления динамических эффектов может быть использована передаточная функция межпарциальных связей

Уравнение для определения коэффициента связности α, обеспечивающее на одной частоте специфический режим динамического гашения колебаний по двум координатам 

Уравнение (6) имеет два корня; корни уравнения могут быть отрицательными или положительными. Если α=0, то система меняет структуру внешних воздействий (этот случай должен рассматриваться отдельно). Настроечным параметром системы может служить соотношение 
3. Уравнение (6) можно преобразовать к виду 
При введении понятия радиуса инерции 
уравнение (8) преобразуется к виду

Корни уравнения (10) определяются выражением

Для конкретизации представлений о зависимостях рассматривается модельная задача со следующими параметрами: М = 300 кг, 
 k1=1000 Н/м; построены графики зависимостей при значениях β=0.1, 0.5, 1,2.
k1=1000 Н/м; построены графики зависимостей при значениях β=0.1, 0.5, 1,2.
Отметим, что  то есть существует область, в которой
то есть существует область, в которой  не являются отрицательными значениями. При заданных параметрах для
не являются отрицательными значениями. При заданных параметрах для  получим область
получим область
В свою очередь, для  получим
получим
В итоге одновременно существуют при условии
одновременно существуют при условии

На фиг. 4 показаны графики зависимостей α1(β), α2(β), поскольку уравнение (10) имеет два вещественных корня; для физических интерпретаций корни (11) могут иметь положительные и отрицательные значения. Для оценки влияния фактора β на вид амплитудно-частотных характеристик могут быть выбраны характерные точки: тт.(1), (1'); тт.(2), (2') и тт.(3), (3').
На фиг. 5, а-г приведены амплитудно-частотные характеристики  и
и  при параметрах α1=0.703; α2=-0.711; β=0.5 (рис. 4, а, б); а также при параметрах α1=0.558; α2=-2.551; β=1.5 на фиг. 5, в, г. Приведенные АЧХ не имеет режимов динамического гашения колебаний, что свидетельствует о том, что в данном случае одновременное динамическое гашение колебаний по двум координатам на одной частоте не реализуется.
при параметрах α1=0.703; α2=-0.711; β=0.5 (рис. 4, а, б); а также при параметрах α1=0.558; α2=-2.551; β=1.5 на фиг. 5, в, г. Приведенные АЧХ не имеет режимов динамического гашения колебаний, что свидетельствует о том, что в данном случае одновременное динамическое гашение колебаний по двум координатам на одной частоте не реализуется.
В предлагаемом подходе динамическое гашение колебаний трактуется как ситуация, в которой частота динамического гашения колебаний определяется из условия равенства нулю числителя передаточной функции. При действии одного возмущающего фактора частот динамического гашения колебаний совпадает с одной из парциальных частот. В случае действия двух одновременных возмущений такого совпадения уже не реализуется.
При решении уравнения (10) определяемые частоты динамического гашения колебаний совпадают с одной из частот собственных колебаний, что упрощает передаточную функцию; при этом дробно-рациональное выражение редуцируется до передаточной функции системы с одной степенью свободы, как показано на фиг. 5, а-г.
При действии на систему двух синфазных гармонических возмущений в системе может формироваться специфический режим, при котором система с двумя степенями свободы изменяется свою структуру и проявляет частотные характеристики, которыми обладают системы с одной степенью свободы. Отметим, что при определенных условиях возможны ситуации, когда отношение амплитуд колебаний  будет практически во всем частотном диапазоне иметь положительное значение; что соответствует появлению возможностей создавать вибрационное поле однородной структуры.
будет практически во всем частотном диапазоне иметь положительное значение; что соответствует появлению возможностей создавать вибрационное поле однородной структуры.
В свою очередь, при определенных параметрах системы структура вибрационного поля формируется с наличием центра качания. То есть вибрационное поле может иметь неподвижную точку; амплитуды колебаний точек рабочего органа массой М будут расположены так, как если бы рабочий орган мог иметь центр вращения подобно рычагу (такая точка может быть названа центром качания).
III. Построение АЧХ межпарциальных связей
Передаточная функция межпарциальных связей определяется выражением

Развивая предложенный выше подход, автором рассматривается задача управления соотношением амплитуд колебаний по координатам у1, у2. Используем выражение передаточной функции межпарциальных связей, при этом учтем обозначение  Для определения значений коэффициента связности внешних возмущений α с учетом коэффициента связности координат γ, получим
Для определения значений коэффициента связности внешних возмущений α с учетом коэффициента связности координат γ, получим

Откуда может быть найдена частота динамического гашения колебаний  При отрицательном значении γ формула (15) принимает вид
При отрицательном значении γ формула (15) принимает вид 
Найдя частоту динамического гашения колебаний из (15). После подстановки ее в (2), (3), можно определить значения амплитуд  Зная значения
Зная значения  а также оценить структуру построения вибрационного поля.
а также оценить структуру построения вибрационного поля.
1. Если γ>0, то можно полагать, что центр качания будет находиться вне твердого тела, а исходная система будет работать как система с одной степенью свободы и совершать угловые движения относительно центра качания.
Если γ<0, то центр качания будет находиться между координатами у1 и у2, что также имеет приложение в вибрационных технологических машинах.
В качестве примера на фиг. 6 приводятся АЧХ межпарциальных связей, из которых следует возможность построения при определенных условиях вибрационных полей необходимых форм и структуры.
Предлагаемый способ изменения структуры и корректировки вибрационного поля в необходимых направлениях, может приводить к результатам, когда система с двумя степенями свободы приобретает в практическом плане свойства, характерные для системы с одной степенью свободы. В целом, такие обстоятельства могут оказаться полезными при построении технологических комплексов, реализующих достаточно сложные технологии многопрофильной обработки материалов (виброперемещение, классификация, сортировка, ориентация и др.)
Список литературы
1. Пановко Г.Я. Лекции по основам теории вибрационных машин и технологий. М.: МГТУ им. Баумана, 2008. - 192 с.
2. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография / Воронеж: ИПЦ «Научная книга», 2011. - 569 с.
3. Быховский И.И. Основы теории вибрационной техники. М: Машиностроение, 1968. - 362 с.
4. Вибрации в технике: справочник в 6-ти томах / Ред. совет: В.Н. Челомей (пред.). - М.: Машиностроение. 1981. Т. 4 Вибрационные процессы и машины / Под ред. Э.Э Лавенделла. 1981. - 504 с.
5. Елисеев С.В., Резник Ю.И., Хоменко А.П. Мехатронные подходы в динамике механических колебательных систем. - Новосибирск: Наука, 2011. - 384 с.
6. Кашуба В.Б. Динамические реакции в соединениях элементов механических колебательных систем / В.Б. Кашуба, СВ. Елисеев, Р.С Большаков. - Новосибирск: Наука, 2017. - 331 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда и устройство для его реализации | 2018 |
|
RU2716368C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ СОСТОЯНИЕМ ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2693711C2 |
| Способ управления динамическим состоянием технологической вибрационной машины и устройство для его осуществления | 2018 |
|
RU2711832C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |

Изобретение относится к машиностроению и может быть использовано для контроля параметров вибрационного поля вибрационных технологических машин. Способ управления формированием структуры и параметров вибрационного поля технологической вибрационной машины, включающий возбуждение рабочего органа вибрационной машины с помощью вибровозбудителя инерционного типа и осуществление контроля за динамическим состоянием рабочего органа датчиками вибрации, отличающийся тем, что вибрационное возбуждение осуществляют двумя вибровозбудителями инерционного типа, при этом обеспечивают их работу на одной частоте гармонических колебаний в противофазе или синфазно путем создания соотношения между амплитудами инерционных сил, определяемых радиусами установки дисбалансов, при этом получают вибрационные поля необходимой формы и параметров при выборе соответствующего коэффициента связности внешних воздействий, определяемого по формуле Q2=α⋅Q1, где Q1, Q2 - силовые внешние возмущения, α - действительное число, принимающие отрицательные, нулевые и положительные значения. Техническим результатом при реализации заявленного решения является управление параметрами и структурой вибрационного поля за счет изменения соотношения между силовыми вибрационными воздействиями, приложенными к рабочему органу технологической машины. 6 ил.
Способ управления формированием структуры и параметров вибрационного поля технологической вибрационной машины, включающий возбуждение рабочего органа вибрационной машины с помощью вибровозбудителя инерционного типа и осуществление контроля за динамическим состоянием рабочего органа датчиками вибрации, отличающийся тем, что вибрационное возбуждение осуществляют двумя вибровозбудителями инерционного типа, при этом обеспечивают их работу на одной частоте гармонических колебаний в противофазе или синфазно путем создания соотношения между амплитудами инерционных сил, определяемых радиусами установки дисбалансов, при этом получают вибрационные поля необходимой формы и параметров при выборе соответствующего коэффициента связности внешних воздействий, определяемого по формуле
Q2=α⋅Q1,
где Q1, Q2 - силовые внешние возмущения, α - действительное число, принимающие отрицательные, нулевые и положительные значения.
| ДИНАМИЧЕСКИ СТАБИЛИЗИРОВАННЫЙ ВИБРАЦИОННЫЙ РАБОЧИЙ ОРГАН ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2010 |
|
RU2440238C2 |
| Статья: "НЕКОТОРЫЕ ПОДХОДЫ К ОБОСНОВАНИЮ СХЕМЫ ИНЕРЦИОННОГО ВОЗБУЖДЕНИЯ В ТЕХНОЛОГИЧЕСКИХ ВИБРАЦИОННЫХ МАШИНАХ", 20.10.2015 | |||
| Диссертация: "Методы управления динамикой механических систем на основе вибрационных полей и инерционных связей", 2004 | |||
| Способ управления характеристикой вибрационного поля и устройство для его осуществления | 2015 |
|
RU2624829C1 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| WO 2007003345 A1, 11.01.2007. | |||

