Изобретение относится к электротехнике и может быть использовано в защитах линий электропередачи.
« Целью изобретения является повыше-
ние быстродействия дистанционного измерительного органа.
На фиг. 1 представлена функциональная схема дистанционного измерительного органа; на фиг.2 -4 - диаграммы, иллюстриру- ющие его работу при коротких замыканиях за спиной и в защищаемой зоне.
Дистанционный измерительный орган содержит преобразователи напряжение - напряжение 1 и ток - напряжение 2, под- ключенный выходом к входу первой модели 3 линии электропередачи (Л ЭП) непосредственно, а к входу второй модели 4 ЛЭП через первый элемент 5 задержки, второй элемент 6 задержки, первый 7 и второй 8 вычи- татели, одни входы которых подключены к основным выходам соответственно первой 3 и второй 4 моделей ЛЭП, другой вход первого вычитателя 7 подключен к выходу преобразователя 1 напряжение - напряже ние. к которому подключен также через второй элемент 6 задержки другой вход второго вычитателл 8. первый 9, второй 10, третий 11 и четвертый 12 умножители, первый сумматор 13, подключенный входами к выходам первого 9 и .второго 10 умножителей, второй сумматор 14, подключенный входами к выходам третьего 11 и четвертого 12 умножителей, первый 15 и второй 16 интеграторы, подключенные входами соответ- ственно к выходам первого 13 и второго 14 сумматоров, а выходами - к входам блока 17 формирования характеристики срабатывания и управляющим входам первой 3 и второй 4 моделей ЛЭП, выпрямители 18 и 19, дополнительно введенный сумматор 20, входы которого подключены через выпрямители 18 и 19 соответственно к выходам первого 7 и второго 8 вычитателей, фильтр 21 нижних частот, подключенный входом к выходу сумматора 20, а выходом через пороговый элемент 22 к инверсному входу элемента И 23, к прямому входу которого подключен выход блока 17 формирования характеристики срабатывания.
Настраиваемые модели 3 и 4 ЛЭП могут быть выполнены, например, в виде RL-моде- ли, включающей в себя умножители 24 и 25, дифференциатор 26 и сумматор 27.
Принцип действия устройства основан на использовании самонастраивающихся моделей ЛЭП. В общем случае может быть использована модель ЛЭП любой сложности, и настройку ее параметров можно вести по многим известным законам. Для определенности изложения воспользована RL-мо- дель и градиентные уравнения настройки ее параметров. В качестве меры близости настраиваемой модели к защищаемой ЛЭП использована целевая функция вида
W t2 (t) + Е2 (t). (1)
где
e(t) U(t)-UM(t):(2)
er(t))-UM(t-TH(3)
невязки.
UM(t) LM(t)
+ RwiWKt);
(4)
UM(t-T) (t) Г) + RM(t)i(t-r) (5)
уравнения моделей З и 4, составленные в данный момент времени t; (т,) и Нм() - индуктивность и активное сопротивление моделей; г- время задержки элементов 5 и б.
С учетом (1)-(5) градиентные уравнения настройки моделей 3 и 4 имеют следующий вид:
LM(O 2)(t)
+ee(l)j«azii dt:
RM(t)-2yfi/ E(t)l(t) +
+ С ( t ) I ( t - Г) dt ,(6)
где YI 0 и ук 0 - коэффициенты усиления каналов самонастройки индуктивности LM (сумматор 14 и интегратор 16) и активного сопротивления (сумматор 13 и интегратор 15). В измерительном органе невязка Ј (t) определяется по (2) с помощью модели 3 и вычитателя 7, невязка t:(i) - по (3) с помощью модели 4 и вычитателя 8, а необходимая производная тока i - дифференциатором 26 моделей 3 и 4. Временной сдвиг входных сигналов l(t- r) и U(t-r), используемых при определении напряжения на выходе модели ЛЭП UM(T.- r) по (5), осуществляется элементами 5 и 6 задержки.
В ходе настройки моделей 3 и 4 измери- тельн й орган изменяет параметры и RM в соответствии с (6) так, чтобы целевая функция, определенная в виде (1), неуклонно снижалась. К концу настройки параметры LM и RM равны параметрам эквивалентной схемы замещения ЛЭП и уровень целевой функции W близок к нулю.
Работа измерительного органа при коротком замыкании на ЛЭП за спиной и в зоне его действия.
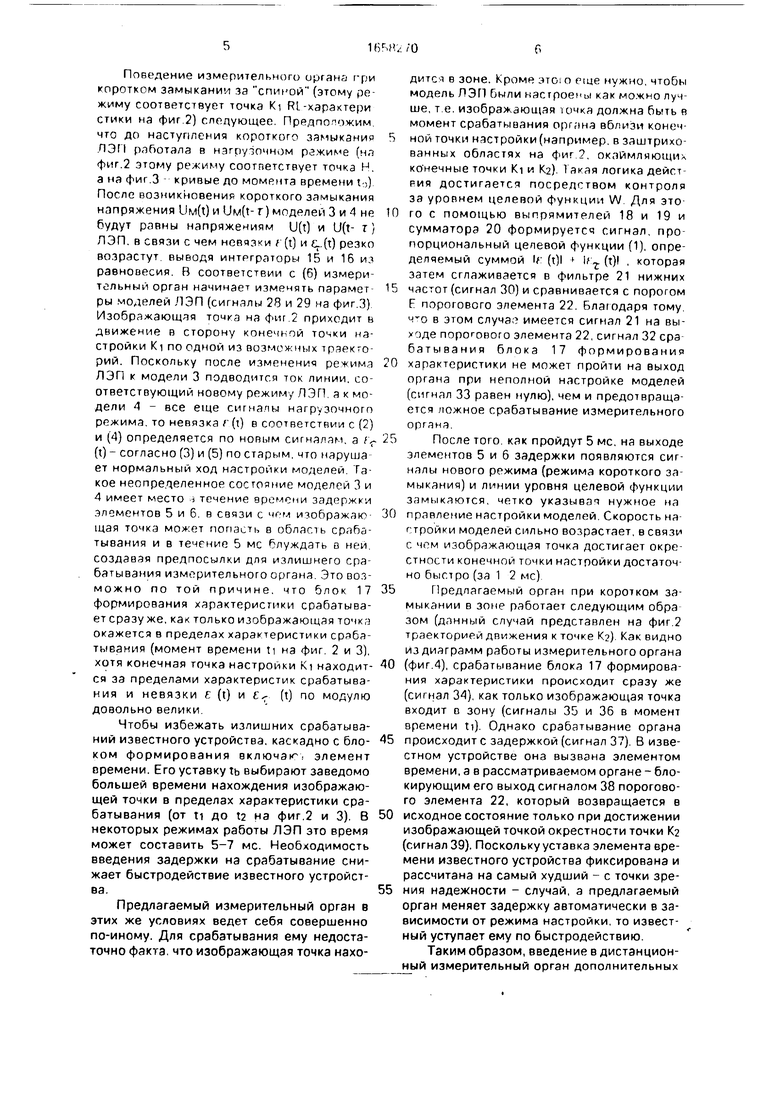
Для простоты изложения характеристика срабатывания принята в виде прямоугольника, расположенного в первом квадранте декартовой системы координат (фиг.2), заданной в осях и RM. Пусть время г задержки элементов 5 и 6 равно 5 мс.
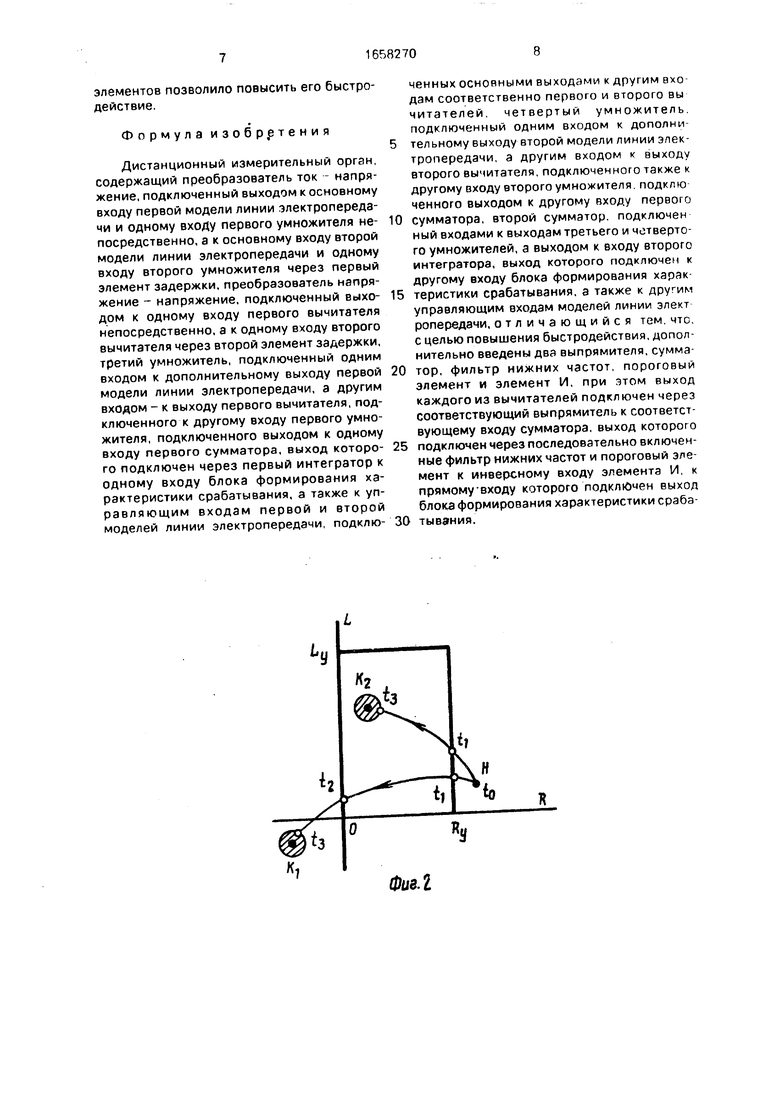
Поведение измерительного органа при коротком замыкании за спиной (этому режиму соответствует точка Ki RL-характери стики на фиг 2) следующее. Предположим что до наступления короткого замыкания НЭП работала в нэгоузочном режиме (на фиг.2 этому режиму соответствует точка Н. а на фиг.З - кривые до момента времени ь) После возникновения короткого замыкания напряжения им(т)и UM(I- г) моделей 3 и 4 не будут равны напряжениям U(t) и U(t- т) ЛЭП. в связи с чем невязки t (t) и Ј.(т) резко возрастут выводя интеграторы 15 и 16 из равновесия. В соответствии с (6) измерительный орган начинает изменять парамет ры моделей ЛЭП (сигналы 28 и 29 на фиг.З) Изображающая точка на фиг 2 приходит в движение в сторону конечной точки настройки Ki по одной из возможных трчек о- рий. Поскольку после изменения режима ЛЭП к модели 3 подводится ток линии, соответствующий новому режиму ЛЭП а к модели 4 - все еще сигналы нагрузочного режима, то невязка г () в соответствии с (2) и (4) определяется по новым сигналам, a tr (t) - согласно р) и (5) по старым, что наруша ет нормальный ход настройки моделей Такое неопределенное состояние моделей 3 и 4 имеет место - течение времени задержки элементов 5 и 6. в связи с чг-м изображаю щая точка может попасть в область срабатывания и в течение 5 мс блуждать о ней создавая предпосылки для излишнего срабатывания измерительного органа Это возможно по той причине, что блок 17 формирования характеристики срабатывает сразу же, как только изображающая точка окажется в пределах характеристики срабатывания (момент времени ti на фиг 2 и 3), хотя конечная точка настройки Ki находит- ся за пределами характеристик срабатывания и невязки Ј (t) и Ј,- (t) по модулю довольно велики
Чтобы избежать излишних срабатываний известного устройства, каскадно с бло- ком формирования включав, элемент времени. Его уставку ть выбирают заведомо большей времени нахождения изображающей точки в пределах характеристики срабатывания (от ti до t2 на фиг.2 и 3). В некоторых режимах работы ЛЭП это время может составить 5-7 мс. Необходимость введения задержки на срабатывание снижает быстродействие известного устройства.
Предлагаемый измерительный орган в этих же условиях ведет себя совершенно по-иному. Для срабатывания ему недостаточно факта, что изображающая точка находится в зоне. Кроме это: о еще нужно, чтобы модель ЛЭП были настроены как можно лучше, т е. изображающая i очка должна быть в момент срабатывания органа вблизи конечной точки настройки(например. в заштрихованных областях на фиг 2, окаймляющих конечные точки Ki и 2) 1 акая логика дейст- РИЯ достигается посредством контроля за уровнем целевой Функции W Для это го с помощью выпрямителей 18 и 19 и сумматора 20 формируется сигнал, пропорциональный целевой функции (1), определяемый суммой If (t)l г(т) , которая затем сглаживается в фильтре 21 нижних частот (сигнал 30) и сравнивается с порогом F порогового элемента 22. Благодаря тому в этом случае имеется сигнал 21 на выходе порогового элемента 22, сигнал 32 срэ батывания блока 17 формирования характеристики не может пройти на выход органа при неполной настройке моделей (сигнал 33 равен нулю), чем и предотвращается ложное срабатывание измерительного органа
После того как пройдут 5 мс, на выходе элементов 5 и б задержки появляются сигналы нового режима (режима короткого замыкания) и линии уровня целевой функции замыкаются, четко указывая нужное на правление настройки моделей Скорость на- гтройки моделей сильно возрастает, в связи с чем изображающая точка достигает окрестности конечной точки настройки достаточно быстро (за 1 2 мс)
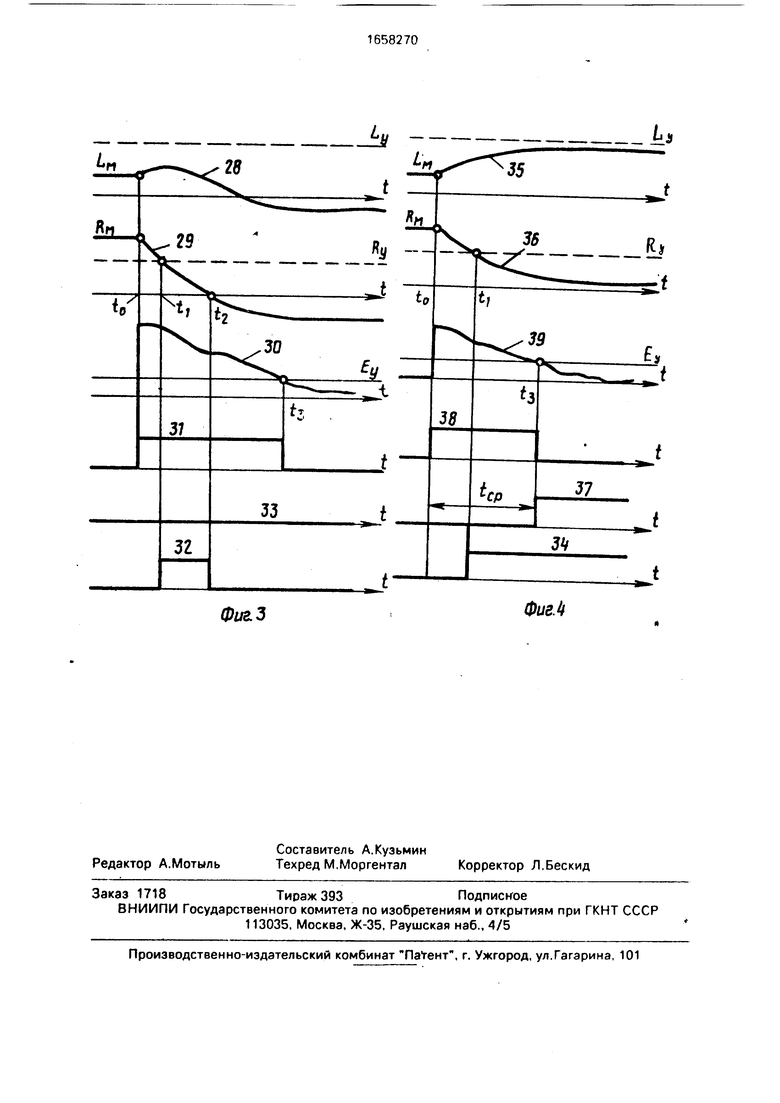
Предлагаемый орган при коротком замыкании в зоне работает следующим обра зом (данный случай представлен на фиг 2 траекторией движения к точке «2) Как видно из диаграмм работы измерительного органа (фиг.4), срабатывание блока 17 формирования характеристики происходит сразу же (сигнал 34), как только изображающая точка входит о зону (сигналы 35 и 36 в момент времени ti). Однако срабатывание органа происходит с задержкой (сигнал 37). В известном устройстве она вызвана элементом времени, а в рассматриваемом органе - блокирующим его выход сигналом 38 порогового элемента 22, который возвращается в исходное состояние только при достижении изображающей точкой окрестности точки К2 (сигнал 39). Поскольку уставка элемента времени известного устройства фиксирована и рассчитана на самый худший - с точки зрения надежности - случай, а предлагаемый орган меняет задержку автоматически в зависимости от режима настройки, то известный уступает ему по быстродействию.
Таким образом, введение в дистанционный измерительный орган дополнительных
элементов позволило повысить его быстродействие.
Формула изобретения
Дистанционный измерительный орган, содержащий преобразователь ток - напряжение, подключенный выходом к основному входу первой модели линии электропередачи и одному входу первого умножителя непосредственно, а к основному входу второй модели линии электропередачи и одному входу второго умножителя через первый элемент задержки, преобразователь напряжение - напряжение, подключенный выходом к одному входу первого вычитателя непосредственно, а к одному входу второго вычитателя через второй элемент задержки, третий умножитель, подключенный одним входом к дополнительному выходу первой модели линии электропередачи, а другим входом - к выходу первого вычитателя, подключенного к другому входу первого умножителя, подключенного выходом к одному входу первого сумматора, выход которого подключен через первый интегратор к одному входу блока формирования характеристики срабатывания, а также к управляющим входам первой и второй моделей линии электропередачи, подключенных основными выходами к другим входам соответственно первого и второго вы читателей, четвертый умножитель, подключенный одним входом к дополнительному выходу второй модели линии электропередачи, а другим входом к выходу второго вычитателя, подключенного также к другому входу второго умножителя, подклю ченного выходом к другому входу первого
сумматора, второй сумматор, подключен ный входами к выходам третьего и четвертого умножителей, а выходом к входу второго интегратора, выход которого подключен к другому входу блока формирования харак
теристики срабатывания, а также к другим управляющим входам моделей линии элект ропередачи, отличающийся тем. что, с целью повышения быстродействия, дополнительно введены два выпрямителя, сумматор, фильтр нижних частот, пороговый элемент и элемент И, при этом выход каждого из вычитателей подключен через соответствующий выпрямитель к соответствующему входу сумматора, выход которого
подключен через последовательно включенные фильтр нижних частот и пороговый элемент к инверсному входу элемента И, к прямому входу которого подключен выход блока формирования характеристики срабатывэния.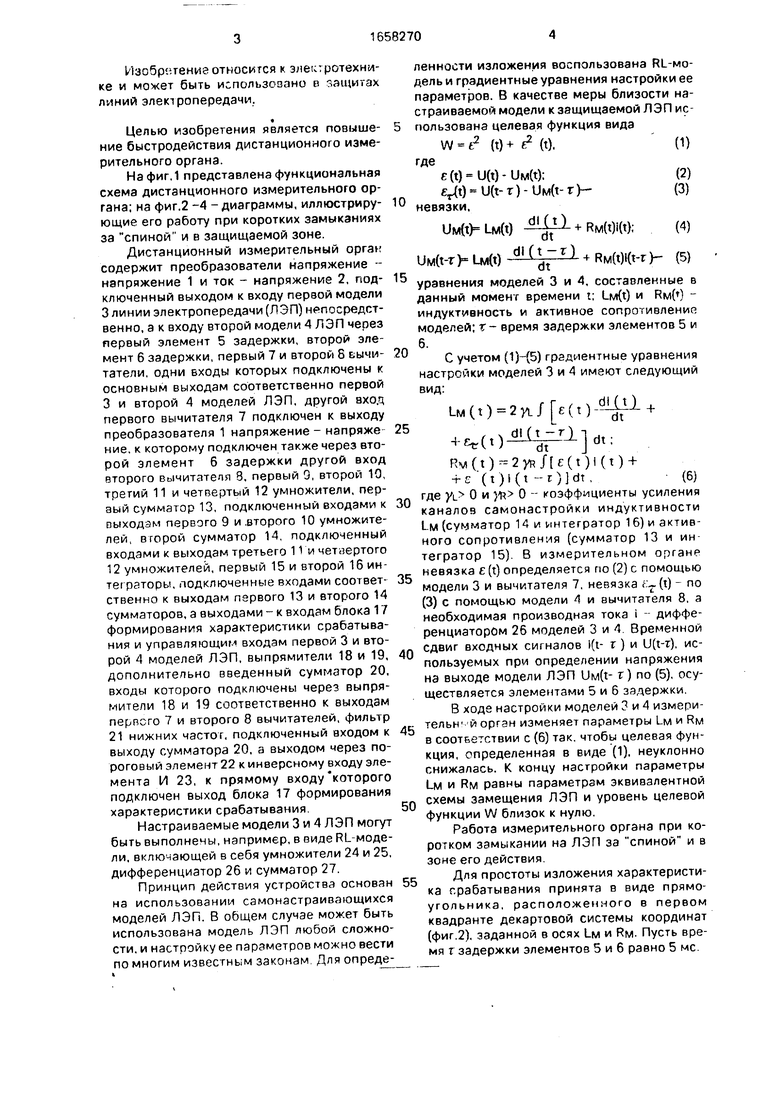
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционный измерительный орган | 1985 |
|
SU1343495A1 |
| Дистанционный измерительный орган | 1985 |
|
SU1403196A1 |
| Блок приращений параметров самонастраивающейся модели линии электропередач | 1985 |
|
SU1427466A1 |
| Дистанционный измерительный орган | 1983 |
|
SU1259389A1 |
| Устройство для контроля параметров линии электропередачи | 1985 |
|
SU1288810A1 |
| Орган контроля синхронизма при автоматическом повторном включении линии электропередачи | 1980 |
|
SU928495A1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОТКЛЮЧЕННОЙ В ЦИКЛЕ ОАПВ ФАЗЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С ШУНТИРУЮЩИМИ РЕАКТОРАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2695890C1 |
| ДИСКРЕТНАЯ СИСТЕМА ОЦЕНИВАНИЯ | 2007 |
|
RU2398258C2 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ КОРРЕКТОРА МЕЖСИМВОЛЬНОЙ ИНТЕРФЕРЕНЦИИ | 1991 |
|
RU2034404C1 |
| Устройство для защиты линийэлЕКТРОпЕРЕдАчи | 1979 |
|
SU796976A1 |
Изо реюн ю / сг , -.лекп от HJ ке и может быть Hcr /,isqOii)nf ; г . линий электропередг т . и t является повь шение быстродействия и-. ;;ч ионного измерительного органа. I возникновении повреждения блок 17 «Ьсрми ования характеристики срабатыва- С(. ЭЬчт I ает выдержки времени при Г яд нии значений сигналов на выходах настраиваемых неделей 3 и 4 линии в область грабатыпаичя. Однако срабатывание не1 счптольного органа происходит только - /Г 0в- и ис езновечия сигнапа на выходе лоосчопоги элемента 22. фиксирующего | ни1,. : суммы вы:,ряблённых и сглэжен- --1Ц ci .i-плг рзссогласования с выходов i /м-- оро 7 и Я 4ц,
к,
fv
to
Фив. 2
Фиг.3
Фиг.
