О 00
со а
Изобретение относится к электро- , технике и может быть использовано в дистанционной защите линий электро- Ьередачи.
; Цель изобретения - повышение бы- Ьтродействия.
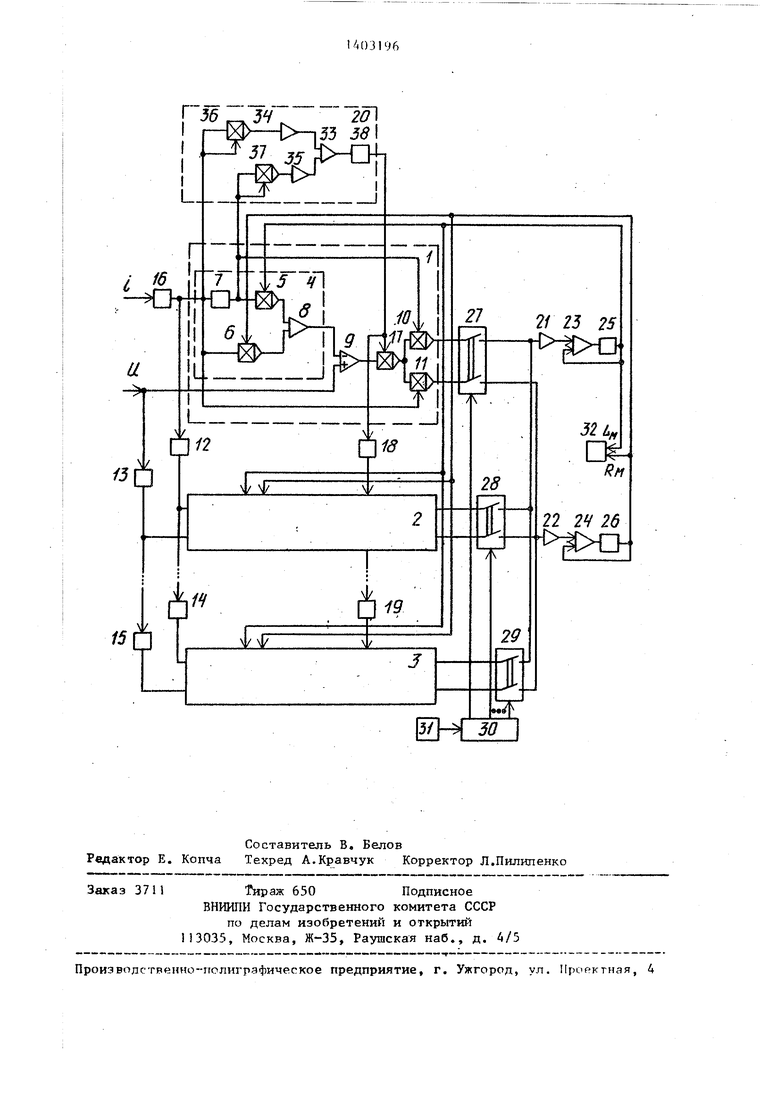
На чертеже изображена схема дистанционного измерительного органа. I Дистанционный измерительный орган Додержит блоки 1-3 приращений наст- 1раиваемых параметров, число которых h не меньше числа параметров модели ПЭП (), каждый из которых содер- кит модель ЛЭП 4, вьтолненнуго на двух умножителях 5 и 6, дифференциаторе 7 и сумматоре 8, выход которого является выходом модели ЛЭП 4, вычитатель 9, один из входов которого соединен с выходом модели ЛЭП 4, а другой -- с одним из входов блока приращений, и умножители 10 и 11 по числу настраиваемых параметров, одни из входов которых объединены между собой, а выходы подключены к выходам блока приращений. Входы каждого блока 1-3 приращений соединены чврез блоки 12-15 задержки с соответствующими входами последующего блока приращений, а входы первого блока I под- ключены соответственно к входу напряжения и органа и выходу преобразователя 16 тока в напряжение. Каждьй блок приращений содержит дополнительный умножитель 17, первый вход которо го соединен с выходом вычитателя 9, второй вход - через один из дополни- 1тельных блоков 18(19) задержки с одно |именным входом аналогичного умножите- ля последующего блока 2(3) прираще- НИИ, а выход - с объединенными входами умножителей 10 и 11 блока приращений. При этом второй вход дополнительного умножителя 17 первого блока 1 приращений подключен к выходу блока 20 автоматического регулирования усиления . Каждый из каналов самонастройки состоит из каскадно соединенных усилителя 21(22), сумматора 23(24) и блока 25(26) выборки и хранения, выход которого соединен с одним из входов сумматора 23 (24) и через управляемые ключи 27-29 подключен к соответствующим выходам всех блоков 1-3 приращений. Управляющие входы всех ключей 27(28-29), соединенных с выхо- одного и того же блока 1(2 и 3) приращений, объединены и подключены к соответствующему выходу распределителя 30 импульсов, управляемого генератором 31 импульсов.
Характеристика срабатывания измерительного органа задается блоком 32 формирования характеристики срабатывания .
Блок 20 автоматического регулирования усиления (АРУ) может быть выполнен на сумматоре 33, входы которого соединены с соответствующими входами блока 20 последовательно соеди- нейными усилителем 34(35) и квадратором 36(37), и элементе 38 с обратно- зависимой характеристикой (делителе).
Устройство работает следующим образом.
Принцип действия измерительного органа основан на определении параметров защищаемого участка линии с помощью самонастраивающейся RL-модели
Линия электропередачи небольшой протяженности может быть описана уравнением
.U(t)L ii||l +Ri(t,
(1)
где R и L - эквивалентные активное
сопротивление и индуктивность RL-схемы за {ещения ЛЭП.
В соответствии с уравнением (l) защищаемый участок линии электропередачи с током i представлен RLr-моде- лью, уравнение которой
. (t)L(t) liiil +R(t)i(t)..(2)
Задача дистанционного измерительного органа состоит в изменении параметров RL-модели L.,(t) и R..(t) таким
м, р
образом, чтобы они стремились к L и Н защищаемого участка ЛЭП.
Изменение настраиваемых параметров происходит по циклам, включающим в себя по п частичных шагов, на каждом из которых, опираясь на значения параметров LJ( ci-1) и RJ (di- I) , полученных на предыдущем частичном maresi-l, вычисляют их новые значения
L() 4-f:TT
R)Ri(oi-l)-/J,) --,|1 ,
где ,l,... - номер цикла настройки - номер частичного шага и частичной функции
Ej, минимизируемой и я j( . данном шаге li; (tL} и ID) коэффициенты, задающие темп дискретного приращения параметреп L и R на шаге oS цикла k.
Номер цикла k в уравнениях (З) увеличивается на единицу каждый раз о после завершения последнего частичного marafli n-l данного цикла. Результатом выполнения шага с номером являются начальные условия для следующего шага с номером М, Очевидно, что}5 при
ь5(.1)Ь() и к1(-1)-Н(п-1), а при Ед,Е,Е,...-Е„.,-0.
Кроме того, настройка модели начи-2о нается при и с заданными начальными значениями L°{-l)Lj и R(-l)Rp. Во избежание.срабатывания измерительного органа изображающая точка с координатами (Lg, Eg} на 25 плоскости L -R у должна быть расположена вне пределов характеристики ера- - батывания, задаваемой блоком 32.
Для конкретной реализации уравнений (З) необходимо указать способ зО определения скорости изменения частичной функции Е по параметрам Lz,(ci- I) и R (сС-1) и алгоритм выбора оптимальных для данного шага настройки о коэф фициентов ) и (о).
Можно показать, что
35
4(()L|;()e(i) ii|iM 6
Rl;,{tf)RtU-l)).i(t)i( .
Основу дистанционного измерительного органа составляют блоки 1-3 при ращений, Дпя обеспечения однозначности настройки необходимо, чтобы их
число п было,, не меньше числа настраиваемых параметров (п 2). Каждому из указанных блоков 1-3 соответствует своя частичная функция Е. Изменение параметров L и RH осуществляется дискретно под управлением генератора 31 и распределителя 30 импульсов. Предположим, что под действием очередного импульса генератора 31 на первом выходе распределителя 30 по- явился импульс управления.ключами 27, Указанные ключи замкнутся, соединяя входы каналов самонастройки с соответствующими выходами блока 1 По
о -
О
5
)
cKojfbKy ;1;(сиредег;итат1ь 30 и fгт JIhcoв вырабатывает, управляющий им11у::ьс только на одном нз выходов, то ос- тачьные ключи 28 и 29 остаются ра- aoMKnyTbiNOi. Поэтому на данном части чном шаге настройки ( о6 О) блоки 2 и 3 участия не принимают, Изменение параметров L и R ведется в соответствии с уравнениям (4; в два этапа. Сначала блоком 1 определяются значения сомножителей, заключенных в квадратные скобки, а затем они умножаются на постоянные коэффициенты
/ и „ уси жтеля ш 21 и 22 каналов самонастройки. На первом этане в блоке 4 вычисляется напряжанне модели U|,(t), в Бычитатале 9 реализуется соотношение «;(t) U(t- r)-U(t-t) (с учетом того, что для блока Л О О, поскольку входные сигналы подводятся к нему без задержки), в блоке 20 АРУ определяется коэффициент
(О), в умножителе 17 ошибка перемножается с коэффициентом (li), в умножителях 10 и 1 завершается вычисление сомножителей в квадратных скобках выражения (4). Сигналы на выходах усилителей 2 и 22 каналов са монастройки пропорциональны приращениям, получаемым параметрами L и R на данном шаге настройки. Далее они складываются с сигналами на выходах блоков 25 и 26 выборки и хранения, пропорциональными величинам настраиваемых параметров L (n-l) и R 4n-l), опредег енным на предыдущем шаге настройки. В результате на выходах сумматоров 23 и 24 действзпот сиг налы, уровни которых пропорциональны новым значениям параметров L L(O) и К (о). Текущий щаг Настройки заканчивается тем, что блоки 25 и 26 вы- : борки и хранения переписывают полученные таким образом значения параметров L(O) и R,(0) (цепи управления
.блоками 25 и 26 не показаны. Выборка нового уровня входного сигнала ими может быть осуществлена, например, по заднему фронту управляющих импульсов, вырабатьшаемых распределителем 20). Так как блок 1 приращений и каналы самонастройки не содержат элементов, обладающих инерционными .свойствами, то длительность шага настройки может быть весьма малой. При использовании стандартных элементов аналоговой и цифровой вычисли5
тельной техники она составляет лишь несколько сот микросекунд.
Следующий шаг (ft{ 1) настройки наступает с. поступлением на вход ра пределителя 30 нового импульса. Уп- 1равляющий импульс - появляется уже на :его втором выходе, приводя в действие ключи 28. В работу вступает бло 2, а, остальные блоки 1 и 3 прираще- ний в это время бездействуют. Взаимдействие между ним и каналами само- :настройки носит тот же характер, чт |и в случае работы блока 1. Особен-- ность шага заключается лишь в том, Что сигналы на вход блока 2 поступа |через блоки 12 и 13с задержкой на
по времени и не вычисляется его коэффициент усиления с . Последнее обстоятельство вызвано тем, что коэф- 20 фициент f (ei) зависит лишь от входных сигналов. Поэтому достаточно оп- Ределить его на первом шаге ( oJ О) |цикла настройки, а затем передавать его значение к другим блокам с задерж-25
:кой г:.. л/ Такой порядок настройки модели со храняется до тех пор, пока не завер- |шится последний шаг цикла (шаг с ноВ предлагаемом измерительном ор не благодаря высокой скорости дейс вия каналов самонастройки дискретн изменение настраиваемых параметров можно .вести с весьма большой част той и, как следствие, время задерж 12-15, 18 и 19 задержки уменьшено на порядок и больше. Кроме того, каждьй шаг изм нения параметров модели осуществля ся наилучшим путем, определяя для этого оптимальный на данном шаге к эффициент S (.
Таким образом, введение в диста ционньй измерительный орган дополн тельных элементов, повышает его быс родействие.
Формула изобретени
( может быть
ером еС- п-1). После него номер шага зо - 1. Дистанционньй измерительный
Ij снова устанавливается равным нулю,
}И первый импульс генератора вновь
ПРИВОДИТ в действие блок I, начиная
1овьй цикл настройки.
I В случае настроенной модели ошибка
) О и приращения параметров
Практически равны нулю. Настройки
|параметров L и R при этом не про35
i м
Р1СХОДИТ, и такое состояние измеритель ого органа может продолжаться сколь УГОДНО долго. Изменение режима ЛЭП нарушает установившееся между моделью и схемой замещения соответствие. Поскольку L («) L R() R, то e(( t ) 0, Измерительный орган стремится свести функцию W к минимуму, подстраивая параметры модели 4 в соответствии с (4). Поэтому параметры модели L и R, спустя некоторое время, снова примут значения параметров схемы замещения L и R. Так как они доступны для непосредственного измерения, то по ним можно судить о параметрах защищаемого участка ЛЭП.
Характеристика срабатывания реле .задается в пространстве параметров
40
45
50
55
орган, основанный на определении п раметров защищаемой линии электро редачи с помощью настраиваемой мод ЛЭП, каждьй из параметров которой настраивается в соответствующем ка нале самонастройки, содержащий иде тичные блоки приращений настраивае параметров модели ЛЭП, каждьй из к торых включает в себя модель ЛЭП, полненную на двух умножителях, диф ренциаторе и сумматоре, входы кото рого соединены с выходами упомянут умножителей и выход которого являе выходом модели ЛЭП, вычитатель, од из входов которого соединен с выхо модели ЛЭП, а другой - с одним из входов блока приращений, и умножит по числу настраиваемых параметров, одни из входов которых объединены между собой, а выходы подключены к выходам блока прираилений, причем о ни входы умножителей модели ЛЭП со динены с выходами соответствующих каналов самонастройки, а другие вх ды объединены с дополнительными вы дами модели ЛЭП и подключены к вто входам умножителей блока приращени один из дополнительных выходов мод ЛЭП непосредственно, другой через
R.. блоком 33.
W
Выбор постоянной V является для фототипа одной из основных проблем.
поскольку ее оптимальное с точки зрения быстродействия значение может быть весьма большим и составить несколько миллисекунд. Например, для измерительного органа, использующего модель (2) и функцию, заключающую в себе две частичные функции вида (4) при п 2, оптимальная величина задержки равна 5 мс.
В предлагаемом измерительном органе благодаря высокой скорости действия каналов самонастройки дискретное изменение настраиваемых параметров можно .вести с весьма большой частотой и, как следствие, время задержки 12-15, 18 и 19 задержки уменьшено на порядок и больше. Кроме того, каждьй шаг изменения параметров модели осуществляется наилучшим путем, определяя для этого оптимальный на данном шаге коэффициент S (.
Таким образом, введение в дистан- ционньй измерительный орган дополнительных элементов, повышает его быстродействие.
Формула изобретения
У блоков
( может быть
5
0
5
0
5
орган, основанный на определении параметров защищаемой линии электропередачи с помощью настраиваемой модели ЛЭП, каждьй из параметров которой настраивается в соответствующем канале самонастройки, содержащий идентичные блоки приращений настраиваемых параметров модели ЛЭП, каждьй из которых включает в себя модель ЛЭП, выполненную на двух умножителях, дифференциаторе и сумматоре, входы которого соединены с выходами упомянутых умножителей и выход которого является выходом модели ЛЭП, вычитатель, один из входов которого соединен с выходом модели ЛЭП, а другой - с одним из входов блока приращений, и умножители по числу настраиваемых параметров, одни из входов которых объединены между собой, а выходы подключены к выходам блока прираилений, причем одни входы умножителей модели ЛЭП соединены с выходами соответствующих каналов самонастройки, а другие входы объединены с дополнительными выходами модели ЛЭП и подключены к вторым входам умножителей блока приращений, один из дополнительных выходов модели ЛЭП непосредственно, другой через
упомянутый дифференциатор подключены к входу модели ЛЭП, а также входы каждого блока приращений соединены через блоки задержки с аналогичными входами последующего блока приращений, входы первого из которых подключены соответственно к входу напряжения органа и выходу преобразователя тока в напряжение, о т л и - ча.ющийся тем, что, с целью повышения быстродействия, в него дополнительно введены блок автоматического регулирования усиления, входы которого подключены к дополнительным выходам модели ГОП первого из упомянутых блоков приращений, блоки задержки, управляекяле ключи, генератор и распределитель импульсов, кроме того, число блоков приращений принято не меньше числа настраивае 01 Х параметров и каждый из блоков приращений дополнительно снабжен умножителем, первый вход которого соединен с выходом вычитателя блока приращений, второй вход через один из упомянутых дополнительных блоков задержки - с одноименным входом аналогичного умножителя последзтощего блока приращений, а выход - с объединенными входа- мй умножителей блока приращений, причем второй вход дополнительного
ножителя первого блока приращемий подключен к выходу блока автомг.тггчес- кого регулирования усиления, при это каждый из каналов самонастройки состоит из каскадно соединенных усилителя, сумматора и блока выборки и хранения, выход которого подсоединен к одному из входов сумматора и через управляемые ключи подключен к соот- ветствуюЕЦ1м выходам всех блоков приращений, а также управляющие входы всех ключей, соединенных с выходами одного и того же блока приращений, объединены и подключены к соответст- ву ощему выходу распределителя импульсов, вход которого подключен к генератору импульсов,
2. Измерительный орган по п.1 отличающийся тем, что блок автоматического регулирования усиления включает в себя двухвходовый сумматор, входы кр торого соединены с соответствующими входами блока каскадно соединенными усилителем и квадратором, и элемент с обратнозависимой характеристикой, вход которого соединен с выходом матора, а выход - с выходом блока автоматического регулироваиия уснле ния.
Г 2
l53 5в
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционный измерительный орган | 1985 |
|
SU1343495A1 |
| Дистанционный измерительный орган | 1988 |
|
SU1658270A1 |
| Блок приращений параметров самонастраивающейся модели линии электропередач | 1985 |
|
SU1427466A1 |
| Устройство для контроля параметров линии электропередачи | 1985 |
|
SU1288810A1 |
| Дистанционный измерительный орган | 1983 |
|
SU1259389A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1992 |
|
RU2072548C1 |
| Система экстремального управления | 1988 |
|
SU1550474A1 |
| Инкроментный умножитель аналоговых сигналов | 1982 |
|
SU1057970A1 |
| Самонастраивающаяся система управления | 1977 |
|
SU650053A1 |
Изобретение относится к области электротехники, а именно к релейной защите. Цель изобретения - повышение быстродействия реле сопротивления. Известно реле сопротивления, основанное на определении параметров ЛЭП с помощью самонастраивающейся П-образ ной ELC-модели. Она содержит блок для вычисления приращений настраиваемых параметров и каналы самонастройки, выполненные на интеграторах. Задача настройки модели в реле сводится к задаче минимизации функционала вида Е |е, (г)-и(г) - ошибка; U(t) - напряжение линии около места установки защиты; U(t) - напряжение модели. Свойства принятого функционала таковы, что реле обладает недостаточно высоким быстродействием и пониженной надежностью функционирования при синусоидальных входных сигналах. 1 ил. (Л с:
| Ванин В.К., Павлов Г.М | |||
| Релейная защита на элементах вычислительной техники | |||
| Л,: Изд-во ЛПИ, 1981, с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| ФОРМА ДЛЯ БРИКЕТОВ | 1919 |
|
SU286A1 |
| Дистанционный измерительный орган | 1985 |
|
SU1343495A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
