своей упругости, не сминая ее гребни, что в случае некоторого изменения рельефа поверхности в пределах сохранения заданной производительности не вызывает изменения положения датчика и, следовательно, скорости подающего транспортера. Только
в случае отклонения датчика относительно уровня корма, заданного производительностью питателя-дозатора, осуществляется Соответствующее воздействие на регулятор скорости подающего транспортера. 1 з.п. ф-лы, 10 ил.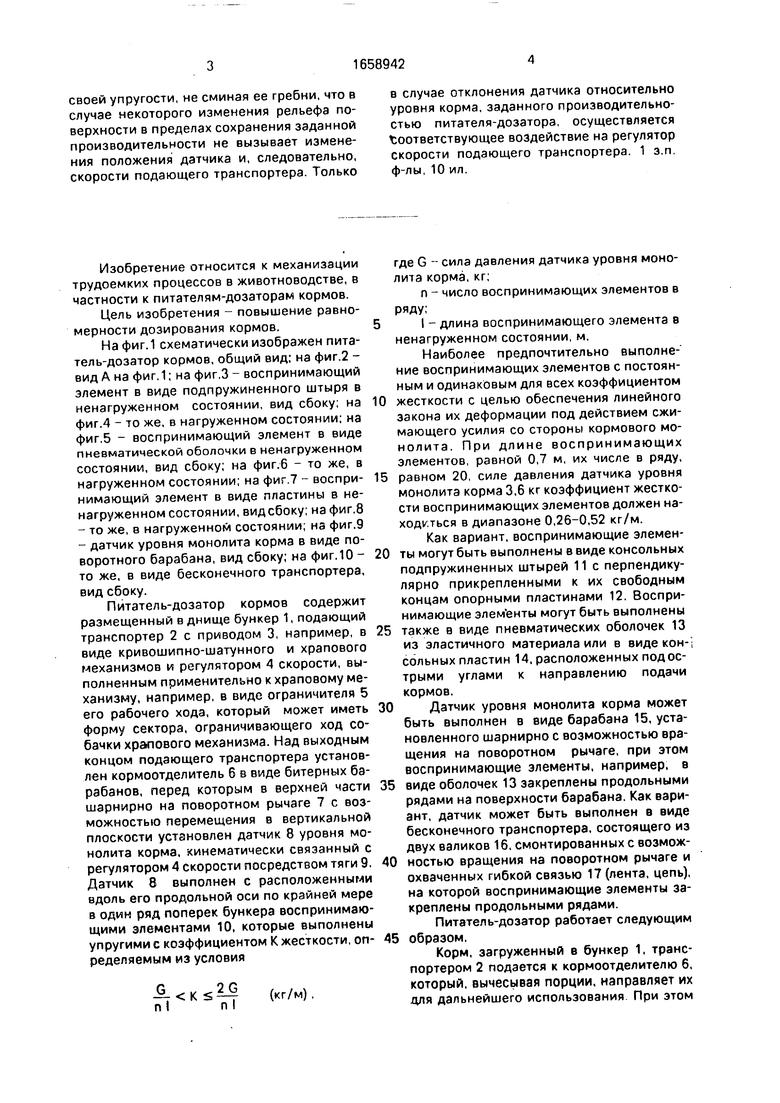
| название | год | авторы | номер документа |
|---|---|---|---|
| Питатель-дозатор кормов | 1987 |
|
SU1426516A1 |
| Питатель-дозатор кормов | 1985 |
|
SU1306530A1 |
| Питатель-дозатор стебельчатых кормов | 1983 |
|
SU1130291A1 |
| УСТРОЙСТВО ДЛЯ ВЫДАЧИ СТЕБЕЛЬЧАТЫХ КОРМОВ | 2008 |
|
RU2382550C1 |
| РАЗДАТЧИК СТЕБЕЛЬЧАТЫХ КОРМОВ | 1998 |
|
RU2150825C1 |
| Устройство для дозированной подачи волокнистых кормов | 1980 |
|
SU899026A1 |
| ПИТАТЕЛЬ СТЕБЕЛЬЧАТЫХ КОРМОВ | 2006 |
|
RU2305933C1 |
| Способ смешивания и выдачи корма животным и устройство для его осуществления | 1985 |
|
SU1327858A1 |
| Питатель-дозатор кормов | 1983 |
|
SU1130293A1 |
| Питатель- дозатор измельченных кормов | 1985 |
|
SU1384295A1 |

Изобретение относится к механизации трудоемких процессов в животноводстве и обеспечивает повышение равномерности дозирования кормов. Питатель-дозатор со7 м держит установленный в днище бункера 1 подающий транспортер 2 с регулятором 4 скорости. На выходе подающего транспортера закреплен кормоотделитель 6. перед которым в верхней части шарнирно на поворотном рычаге 7 размещен датчик 8 уровня монолита корма, кинематически связанный посредством тяги 9 с регулятором 4. Датчик выполнен с расположенными вдоль его продольной оси по крайней мере в один ряд поперек бункера воспринимающими элементами 10, которые выполнены упругими с заданным коэффициентом К жесткости, зависящим от силы давления датчика, числа и длины в ненагруженном состоянии воспринимающих элементов в данном питателе-дозаторе. При взаимодействии с поверхностью монолита корма воспринимающие элементы деформируются благодаря S Ю Ы у & О О1 00 43 к: Фиг. 1
Изобретение относится к механизации трудоемких процессов в животноводстве, в частности к питателям-дозаторам кормов.
Цель изобретения - повышение равномерности дозирования кормов.
На фиг.1 схематически изображен питатель-дозатор кормов, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - воспринимающий элемент в виде подпружиненного штыря в ненагруженном состоянии, вид сбоку; на фиг.4 - то же, в нагруженном состоянии; на фиг.5 - воспринимающий элемент в виде пневматической оболочки в ненагруженном состоянии, вид сбоку; на фиг.6 - то же, в нагруженном состоянии; на фиг.7 - воспринимающий элемент в виде пластины в ненагруженном состоянии, вид сбоку; на фиг,8
-то же, в нагруженном состоянии; на фиг.9
-датчик уровня монолита корма в виде поворотного барабана, вид сбоку; на фиг. 10 - то же, в виде бесконечного транспортера, вид сбоку.
Питатель-дозатор кормов содержит размещенный в днище бункер 1, подающий транспортер 2 с приводом 3, например, в виде кривошипно-шатунного и храпового механизмов и регулятором 4 скорости, выполненным применительно к храповому механизму, например, в виде ограничителя 5 его рабочего хода, который может иметь форму сектора, ограничивающего ход собачки храпового механизма. Над выходным концом подающего транспортера установлен кормоотделитель 6 в виде битерных барабанов, перед которым в верхней части шарнирно на поворотном рычаге 7 с возможностью перемещения в вертикальной плоскости установлен датчик 8 уровня монолита корма, кинематически связанный с регулятором 4 скорости посредством тяги 9. Датчик 8 выполнен с расположенными вдоль его продольной оси по крайней мере в один ряд поперек бункера воспринимающими элементами 10, которые выполнены упругими с коэффициентом К жесткости, определяемым из условия
п Iп I
(кг/м) ,
где G - сила давления датчика уровня монолита корма, кг;
п - число воспринимающих элементов в ряду;
I - длина воспринимающего элемента в
ненагруженном состоянии, м.
Наиболее предпочтительно выполнение воспринимающих элементов с постоянным и одинаковым для всех коэффициентом
жесткости с целью обеспечения линейного закона их деформации под действием сжимающего усилия со стороны кормового монолита. При длине воспринимающих элементов, равной 0,7 м, их числе в ряду,
равном 20, силе давления датчика уровня монолита корма 3,6 кг коэффициент жесткости воспринимающих элементов должен находиться в диапазоне 0,26-0,52 кг/м.
Как вариант, воспринимающие элементы могут быть выполнены в виде консольных подпружиненных штырей 11с перпендикулярно прикрепленными к их свободным концам опорными пластинами 12. Воспринимающие элем енты могут быть выполнены
также в виде пневматических оболочек 13 из эластичного материала или в виде кон-, сольных пластин 14, расположенных под острыми углами к направлению подачи кормов.
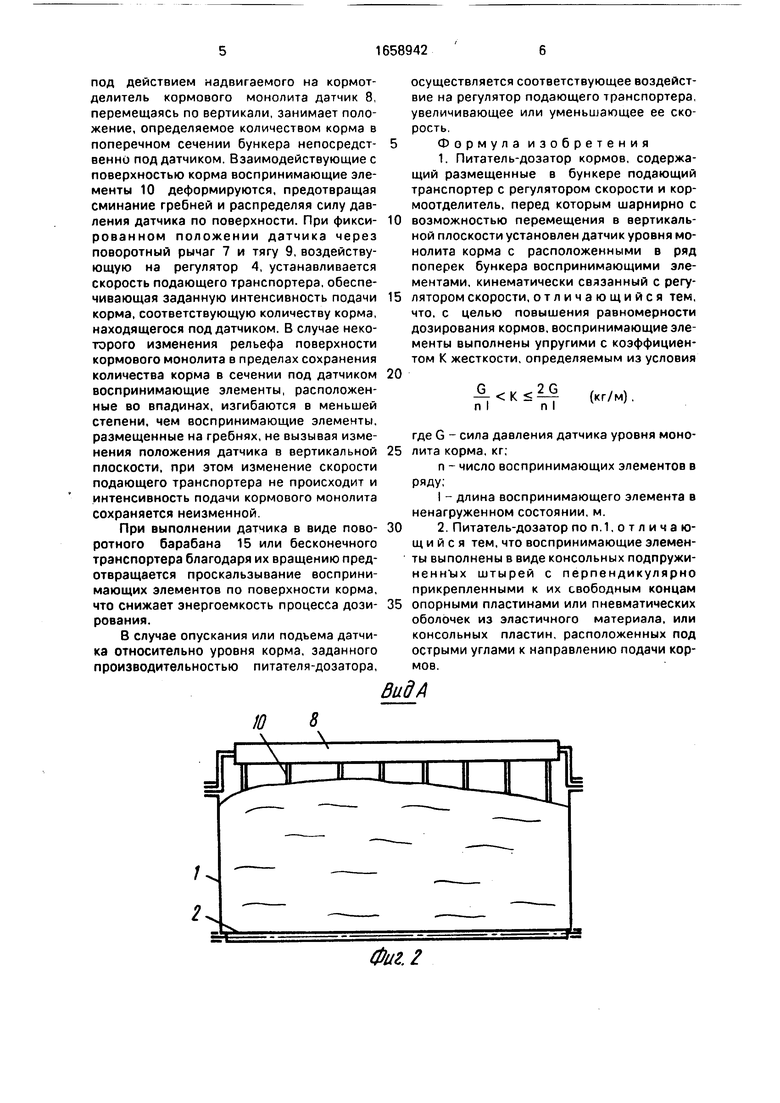
Датчик уровня монолита корма может быть выполнен в виде барабана 15, установленного шарнирно с возможностью вращения на поворотном рычаге, при этом воспринимающие элементы, например, в
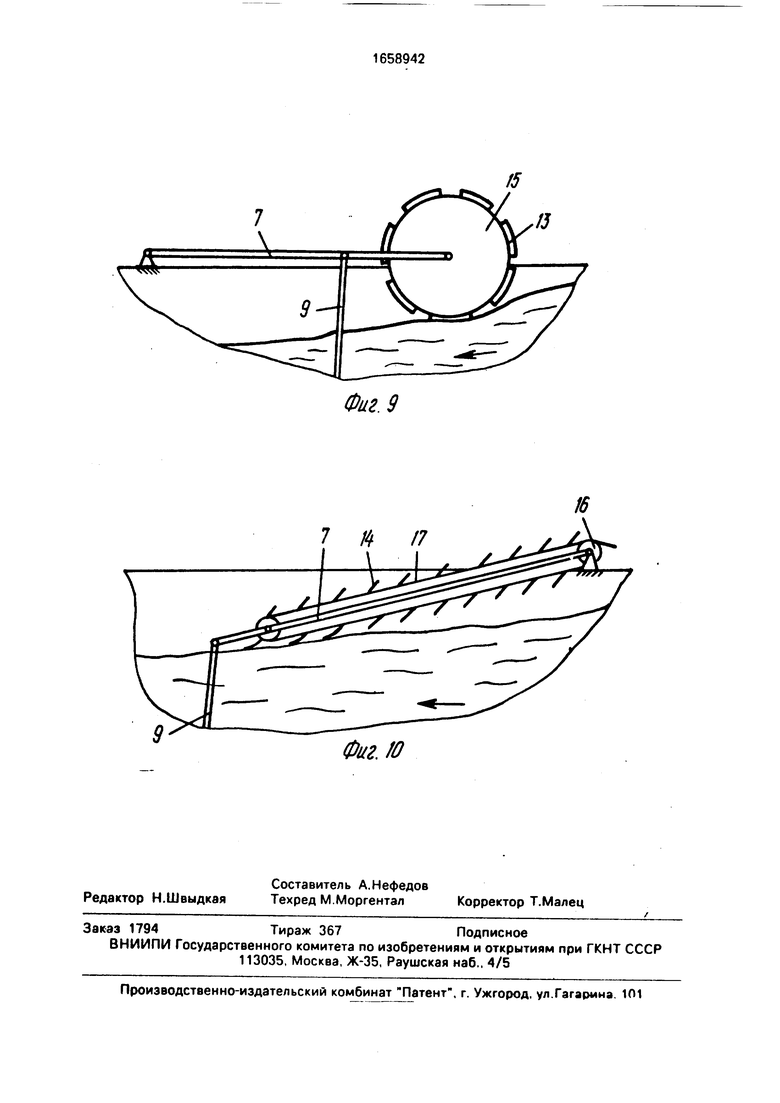
виде оболочек 13 закреплены продольными рядами на поверхности барабана. Как вариант, датчик может быть выполнен в виде бесконечного транспортера, состоящего из двух валиков 16. смонтированных с возможностью вращения на поворотном рычаге и охваченных гибкой связью 17 (лента, цепь), на которой воспринимающие элементы закреплены продольными рядами.
Питатель-дозатор работает следующим
образом.
Корм, загруженный в бункер 1, транспортером 2 подается к кормоот делителю 6, который, вычесывая порции, направляет их для дальнейшего использования При этом
под действием надвигаемого на кормот- делитель кормового монолита датчик 8, перемещаясь по вертикали, занимает положение, определяемое количеством корма в поперечном сечении бункера непосредст- венно под датчиком. Взаимодействующие с поверхностью корма воспринимающие элементы 10 деформируются, предотвращая сминание гребней и распределяя силу давления датчика по поверхности. При фикси- рованном положении датчика через поворотный рычаг 7 и тягу 9, воздействующую на регулятор 4, устанавливается скорость подающего транспортера, обеспечивающая заданную интенсивность подачи корма, соответствующую количеству корма, находящегося под датчиком. В случае некоторого изменения рельефа поверхности кормового монолита в пределах сохранения количества корма в сечении под датчиком воспринимающие элементы, расположенные во впадинах, изгибаются в меньшей степени, чем воспринимающие элементы, размещенные на гребнях, не вызывая изменения положения датчика в вертикальной плоскости, при этом изменение скорости подающего транспортера не происходит и интенсивность подачи кормового монолита сохраняется неизменной.
При выполнении датчика в виде пово- ротного барабана 15 или бесконечного транспортера благодаря их вращению предотвращается проскальзывание воспринимающих элементов по поверхности корма, что снижает энергоемкость процесса дози- рования.
В случае опускания или подъема датчика относительно уровня корма, заданного производительностью питателя-дозатора,
осуществляется соответствующее воздействие на регулятор подающего транспортера, увеличивающее или уменьшающее ее скорость.
Формула изобретения 1. Питатель-дозатор кормов, содержащий размещенные в бункере подающий транспортер с регулятором скорости и кор- моотделитель, перед которым шарнирно с возможностью перемещения в вертикальной плоскости установлен датчик уровня монолита корма с расположенными в ряд поперек бункера воспринимающими элементами, кинематически связанный с регулятором скорости, отличающийся тем, что. с целью повышения равномерности дозирования кормов, воспринимающие элементы выполнены упругими с коэффициентом К жесткости, определяемым из условия
п Iп I
(кг/м),
где G - сила давления датчика уровня монолита корма, кг;
п - число воспринимающих элементов в ряду;
I - длина воспринимающего элемента в ненагруженном состоянии, м.
Вид А
Фиг. /
NO
Фиг.З
HE SSSSSSj
в
k
/4
Фиг. 7
ЪЗ
tl
Фиг Л
sss
s«
Фиг. 6
MSSSSS S
Фиг. 8
7
Фиг. 9
7 / 17
Фиг. Ю
| Дозатор кормов | 1984 |
|
SU1166761A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
