Изобретение относится к магнитным измерениям и может быть использовано для определения направления магнитокристал- лической текстуры ферромагнитных образцов, имеющих форму тел вращения.
Целью изобретения является повышение точности определения направления магнитокристаллической текстуры ферромагнитных образцов, имеющих форму тел вращения, за счет снижения влияния трения в опорах и гистерезисных свойств материала образца.
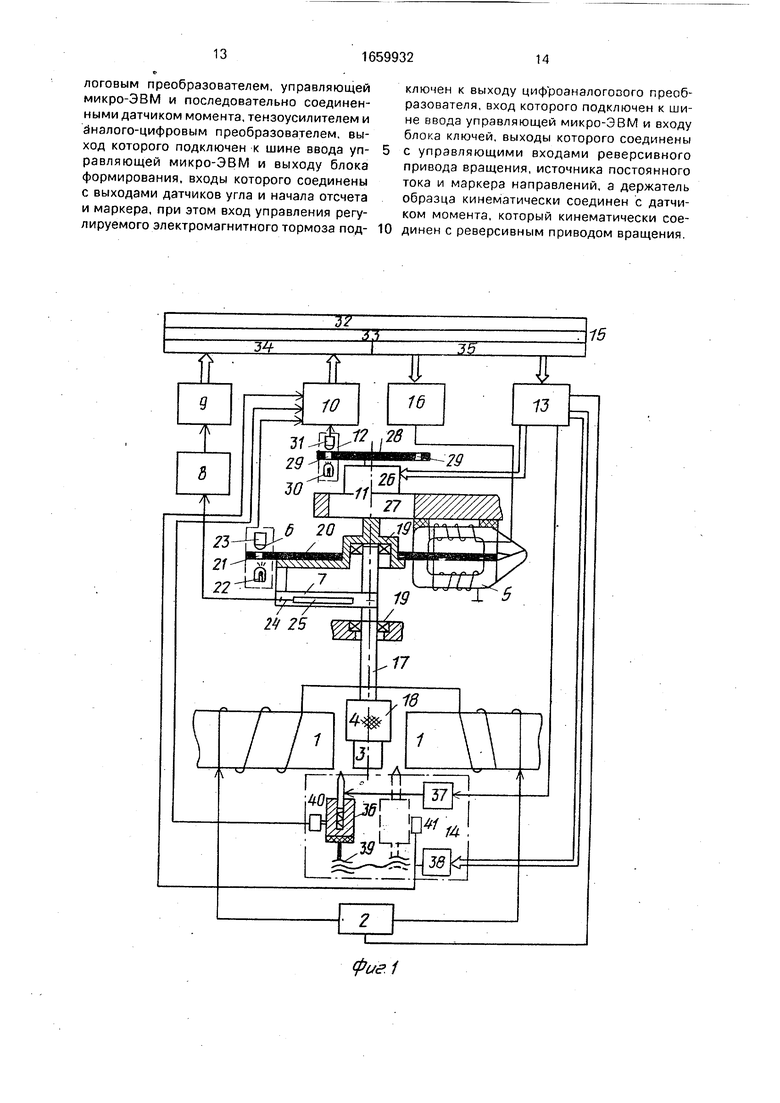
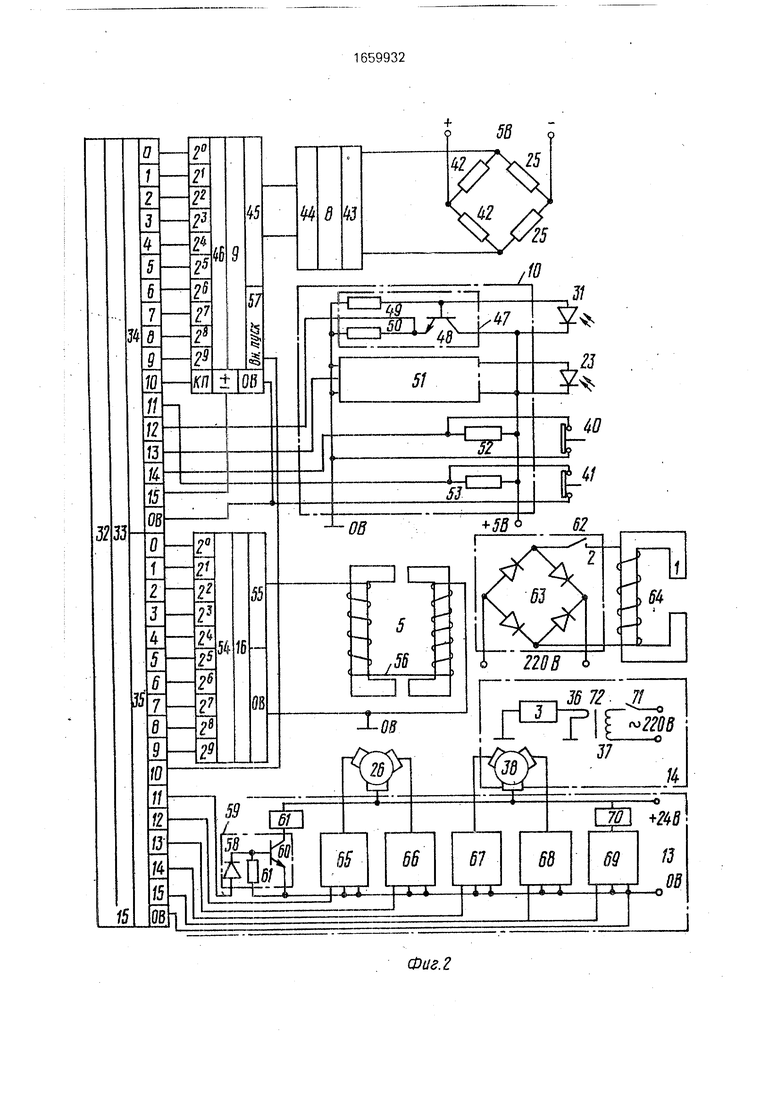
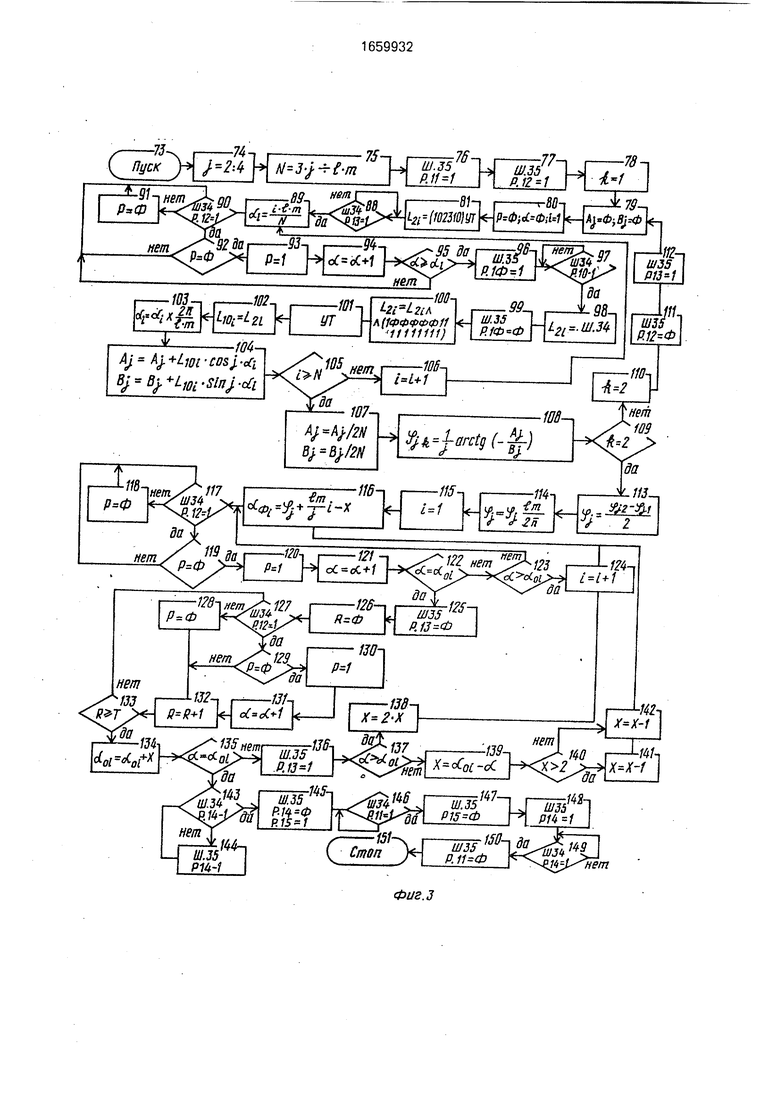
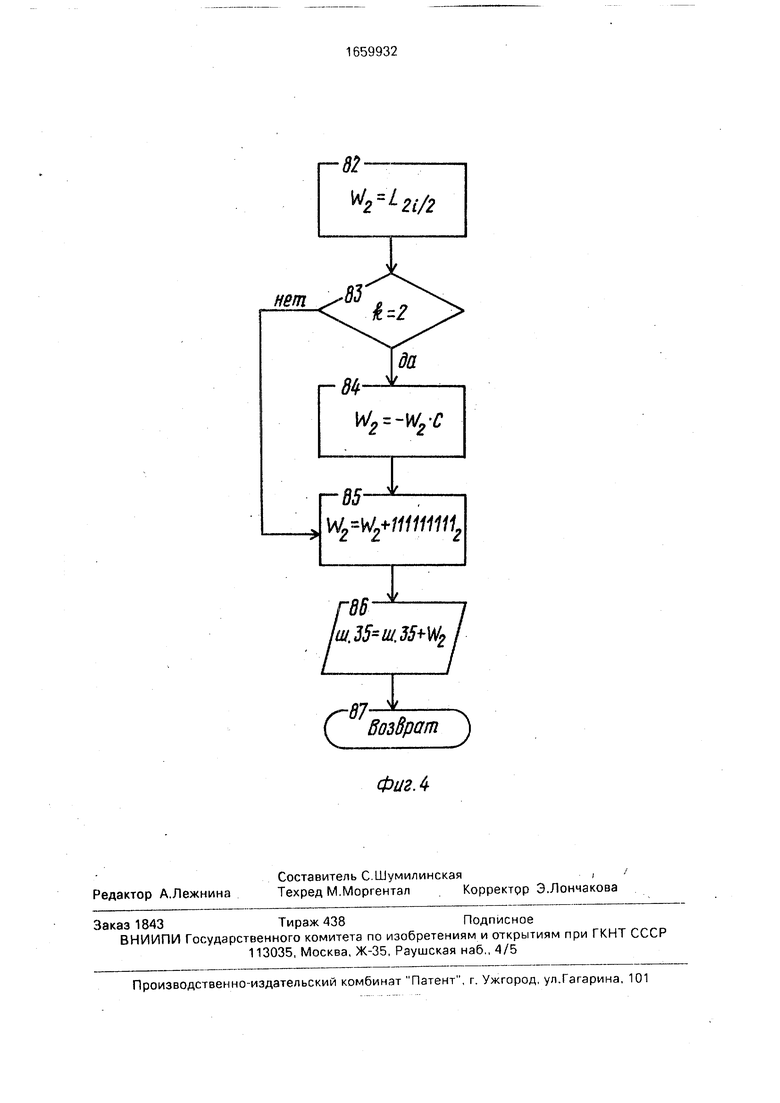
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - схема электрических соединений; на фиг. 3 - функциональная блок-схема алгоритма работы микро-ЭВМ в составе устройства; на фиг. 4 - функциональная блок-схема алгоритма управления тормозом.
Устройство (фиг 1)состоит из электромагнита 1 с источником 2 постоянного тока, образца 3, приспособления 4 размещения
образца (держателя образца), регулируемого тормоза 5, датчика 6 начала отсчета угла, датчика 7 вращающего момента тензоуси- лителя 8, аналого-цифрового преобразователя (АЦП) 9, блока 10 формирования сигналов, реверсивного привода 11 вращения, датчика 12 угла поворота, бпока 13 ключей, маркера 14 направлений, управляющей микро-ЭВМ 15 и цифроаналогового преобразователя (ЦАП) 16
Источник 2 подключен к электромагниту 1, в воздушный зазор которого помещен образец 3, закрепленный в приспособлении 4, представляющем собой оправку 17с цанговым зажимом 18, размещенную в подшип- никовых опорах 19 На оправке 17 закреплен диск 20 датчика 6 начала отсчета угла.В диске 20 выполнено одно отверстие 21. В датчик 6 начала отсчета угла входят также осветитель 22 и фотодиод 23 Датчик 6 соединен с блоком 10 Оправка 4 через датчик 7, представляющий собой упругую
О
ел ю о со
.балку 24 с наклеенными тензорезисторами 25,соединена с реверсивным приводом 11, состоящим из реверсивного электродвигателя 26 и редуктора 27. Электродвигатель 26 связан с датчиком 12, состоящим из диска 28 с отверстиями 29, закрепленного на валу электродвигателя 26, осветителя 30 и фотодиода 31. Датчик 12 соединен с блоком 10. Управляющая микро-ЭВМ 15, в качестве которой в устройстве может быть использована 16- разрядная микро-ЭВМ модели Электроника-60, Электроника НМС и другие, состоит из центрального процессора Электроника 60-М2 32 и интерфейса 33 ввода-вывода, в качестве которого используется. устройство параллельного обмена И2 15 КС-180-032, имеющее 16- разрядные шины ввода 34 и вывода 35. Десятиразрядный АЦП 9 соединен с шиной 34 ввода микро-ЭВМ 15, с которой соединен также блок 10. Шина 35 вывода микро-ЭВМ 15 соединена с АЦП 9, блоком 13 и с ЦАП 16, Блок 13 соединен с реверсивным двигателем 26, источником 2, маркером 14, включающим электрограф 36 с источником 37 питания, реверсивный электродвигатель 38, винтовую пару 39, соединенную с электрографом 36, а также датчик 40 начального положения и датчик 41 конечного положения. Датчики 40 и 41 соединены с блоком 10. В качестве электродвигателей 26 и 38 могут быть применены реверсивные электродвигатели постоянного тока. Десятиразрядный ЦАП 16 соединен с управляемым тормозом.
Тензорезисторы 25 датчика 7 (фиг. 1), наклеенные на противоположные стороны упругой балки 24, соединены по мостовой схеме с компенсирующими резисторами 42 (фиг. 2). Одна диагональ моста подключена к источнику постоянного тока 5В, а другая диагональ - к входу 43 тензоусилителя 8. Выход 44 тензоусилителя 8 соединен с аналоговым входом 45 АЦП 9. Разряд 2° шины цифрового выхода 46 АЦП 9 соединен с разрядом О шины ввода 34 ЭВМ 15, разряд 27 - с разрядом 1 шины 34 и т. д., разряд 2 - с разрядом 9 шины 34, Конец преобразования КП - с разрядом 10 шины 34, разряд + знаки сигнала - с разрядом 15 шины 34, который является знаковым разрядом для 16-разрядных. микро-ЭВМ .Разряд 0В (ноль вольт)шины46 АЦП 9 соединен с разрядом 0В шины 34 микро-ЭВМ 15 и с контактом 0В блока 10 ( формирования сигналов. Фотодиод31 датчика 12 (фиг. 1)соединен с блоком 10(фиг. 2)и включен в формирователь 47 между коллектором и базой транзистора 48. Через резистор 49 база транзистора 48 соединена с контактом
0В. Эмиттер транзистора 48 соединен через резистор 50 с контактом 0В и с разрядом 12 шины 34 микро-ЭВМ 15. Коллектор транзистора 48 соединен с контактом +5В.
Фотодиод 23 датчика 6 (фиг. 1) соединен с блоком 10 (фиг. 2) и через формирователь 51 с разрядом 13 шины 34 микро-ЭВМ 15. Формирователи 47 и 51 одинаковы по составу и соединениям. Датчик 40 маркера 14
0 (фиг. 1), представляющий собой нормально- замкнутый конечный выключатель, соединен с контактом 0В блока 10 (фиг. 2) и разрядом 14 шины 34 микро-ЭВМ 15 и через резистор 52 соединен с контактом +5В.
5 Датчик 41 маркера 14 (фиг. 1), представляющий собой нормально-замкнутый конечный выключатель, соединен с контактом ОВ блока 10 (фиг. 2) и с разрядом 11 шины 34 микро-ЭВМ 15 и через резистор 53 с контак0 том +5В. Разряд 0, шины выводао35 микро-ЭВМ 15 соединен с разрядом 2 шины входа 54 ЦАП 16, разряд 1 шины 35 соединен с разрядом 21 шины 54, разряд 2 шины 35 соединен с разрядом 2 шины 54
5 и т. д. Аналоговый выход 55 ЦАП 16 соединен с началом обмотки 56 тормоза 5. Конец обмотки 56 соединен с выходом 0В ЦАП 16. Разряд 40 шины вывода 35 микро- ЭВМ 15 соединен с входом 57 Внешний
0 пуск АЦП 9. Разряды 11,12,:13,14,15 соединены с блоком 13. Разряд 11 через диод 58 ключа 59 соединен с базой транзистора 60 и через резистор 61 с контактом 0В, эмиттер транзистора 60 соединен с
5 контактом 0В, а коллектор - с катушкой реле 61, второй контакт которой соединен с контактом +24В. Контакты 62 реле 61 включены между выпрямителем 63 источника 2 и обмоткой 64 электромагнита 1. Разряд
0 12 шины 35 через ключ 65 соединен с первой обмоткой реверсивного электродвигателя 26 привода 11 (фиг. 1). Разряд 13 шины 35 (фиг. 2) через ключ 66 соединен с второй обмоткой реверсивного электродви5 гателя 26, Третья обмотка электродвигателя 26 соединена с контактом +24 В. Разряд 14 шины 35 через ключ 67 соединен с первой обмоткой реверсивного электродвигателя 38 маркера 14 (фиг. 1). Разряд 15
0 шины 35 через ключ 68 соединен с второй обмоткой электродвигателя 38 и через ключ 69 с катушкой реле 70. Третья обмотка электродвигателя 38 соединена с контактом +24 В блока 13. Второй контакт катушки
5 реле 70 соединен с контактом плюс +24 В. Контакты 71 реле 70 включены между трансформатором 72 источника питания 37 маркера 14с напряжением 220 В один контакт понижающей обмотки которого соединен с разрядником электрографа 36, а другой контакт - с корпусом. С корпусом электрически соединен также образец 3.
Устройство работает следующим образом,
Образец 3 (фиг. 1), у которого необходи- мо определить направление текстуры по диаметру, зажимается в цанговом зажиме 18 приспособления 4. При этом приспособление А ориентировано в зазоре электромагнита 1 так, что его ось вращения параллельна торцам полюсных наконечников электромагнита 1, Осуществляется пуск программы микро-ЭВМ 15 (поз. 73, фиг. 3). В программе заранее указан номер гармоники j, по которой будет определяться направление текстуры (поз 74). Как известно, вращающий момент, действующий на тек- стурованный образец в виде тела вращения в магнитном поле, имеет сложный гармонический состав:
L (а) + С2 sin 2 (а + 972 ) + С« sin 4
х(а+р4 ) + Cesin 6(а+уэб)...(1)
Очевидно, что выражение (1) представляет собой частный случай ряда Фурье
L(a)+ Ј Cj sin j (a+ Ј), (2)
1 j i
где С2. Gi,...Cj - амплитуды гармонических составляющих момента с периодом 2 тг/j ;
j - номер гармоники;
Ао/2 - постоянная составляющая момента;
- (р - фаза j-й гармоники;
а- текущая координата угла поворота образца;
АО - константа.
При этом для цилиндрического образца с текстурой направленной кристаллизации, имеющего одну ось YeKCTypy в сечении, пер- пендикулярном его образующей, будут иметь место гармоники с номером, кратным двум, убывающие по амплитуде с увеличением номера.
Для цилиндрического образца с монокристаллической текстурой, у которого одна из осей типа (100) совпадает с его образующей, будут иметь место гармоники с номером j, кратным 4, убывающие по амплитуде с увеличением номера.
Следовательно, при определении направления текстуры образца направленной кристаллизации j должно быть равно 2 и для определения текстуры целесообразней использовать гармонику С2. При определении направления осей типа (100) по диаметру монокристалла целесообразней использовать гармонику С4 и, следовательно, j должно быть равно 4.
Выражение (2) в тождественной форме может быть записано как
L ( а ) + J (Aj cos j a + В J sin j a).
i 1
(3)
10
Коэффициенты Фурье Aj и Bj определяются по формулам Эйлера:
2 т
AJ т /о L (а) cos j a d a; (4)
2 т
Bj Y J0 L (a) cos j a d a; (5)
или с использованием приближенного метода численного интегрирования 5 N
м 2,
Aj
N
Li cos j d i ;
(6)
BJ IN S LI sin J d 141 1
0Фаза гармоники pt , представляющая
собой угол между направлением текстуры и направлением начала отсчета угла, определяется из выражения
у arctg ( - Aj/Bj ).(7)
Таким образом, по результатам гармонического анализа угловой зависимости вращающего момента можно определить направление его магнитокристаллической
0 текстуры. При этом численное интегрирование по правилам Фурье-анализа необходимо выполнить в N равноотстоящих точках при вращении образца на один оборот. С увеличением N повышается точность анэли5 за. Минимальное количество точек, при котором возможно выделение данной гармоники, равно 3. Поэтому в поз. 75 (фиг. 3)заранее в программе микро-ЭВМ определяется в зависимости от требуемой точности
0- количество замеров за один оборот образца 3. При этом N не может быть меньше 3 j, где j - номер выделяемой гармоники, и не может быть больше величины I т, где I - передаточное отношение редуктора 27 (фиг. 1), m
5 - число отверстий 29 в диске 28 датчика 12. Произведение I m есть число импульсов, получаемых от датчика 12 за один оборот.
В поз. 76 (фиг. 3) осуществляется включение электромагнита 1. При этом на разряд
0 --ц шины 35 микро-ЭВМ подается логическая единица. Открывается транзистор 60 и включается реле 61 блока 13. Контакты 62 замыкаются и источник 2 подключается к обмоткам 64 электромагнита 1. В зазоре
5 электромагнита 1 возникает постоянное магнитное поле, напряженность которого должна быть больше коэрцитивной силы материала образца 3 для обеспечения его пе- ремагничивания при вращении.
Затем микро-ЭВМ 15 в соответствии с поз. 77 (фиг. 3) выставляет логическую единицу на разряде 12 шины 35 Срабатывает ключ 65 блока 13. Включается вращение реверсивного двигателя 26 привода 11 в первом направлении, что отмечается приравниванием переменной (поз. 78, фиг. 3), в поз. 79 обнуляются переменные AJ и Bj для расчетов по формулам (6). Затем присваивается номер первой точке измерения I (поз. 80) и обнуляется переменная а -счетчик угловой координаты образца Обнуляется также указатель уровня сигнала (переменная Р) от фотодиода 31 датчика 12. Б поз. 81 выполняется подпрограмма управления тормозом 5 (УТ). При входе в подпрограмму определяется величина двоичной переменной L.2. В данном случае L2 равна двоичному числу, соответствующему десятичному числу 1023. В поз. 82 переменная . Поскольку , то после выполнения ветвления в поз. 83 и суммирования в поз, 85 переменная Л/2 1023ю. В поз. 86 на разрядах 0-9 шины 35 выставляется комбинация из логических нулей и единиц, соответствующая двоичному числу Л/2. В данном случае на всех разрядах 0-9 шины 35 выставляются логические единицы. Соответственно единицы появляются на разрядах 2°-29 шины 54 ЦАП 16 и на выходе 55 ЦАП16 появляется напряжение, пропорциональное комбинации на входе 54. В данном случае это максимально возможное напряжение По обмотке 56 тормоза 5 протекает максимальный ток, сердечники тормоза 5 притягиваются, сжимая диск 20 и прикладывая к выходному валу редуктора 27 максимальный тормозящий момент. В результате выбираются зазоры в механических передачах привода 11 и обеспечивается синхронное вращение диска 29, диска 20 и образца 3. Затем микро-ЭВМ 15 переходит в режим ожидания сигнала логической единицы от датчика 6 (поз. 88 фиг. 3), который появляется один раз за оборот образца 3 и определяет начало отсчета координат в устройстве.
При прохождении отверстия 21 диска 20 между осветителем 22 и фотодиодом 23 датчика 6 фотодиод 23 засвечивается и открывается. Срабатывает формирователь 51 блока 10 и на разряде 13 шины 34 микро- ЭВМ 15 появляется логическая единица. Микро-ЭВМ 15 переходит к поз. 89 (фиг. 3) программы. Здесь выполняется расчет координаты GЈ,-W точки измерения в импульсах датчика 12. В поз. 90 (фиг. 3) микро-ЭВМ 15 переходит в режим ожидания сигнала логической единицы отдатчика 12 на разряде 12 шины 34. При прохождении отверстия 29 диска 28 между осветителем 30 и фотодиодом 31 последний засвечивается и открывается. Открывается транзистор 48
блока 10 и на разряде 12 шины 34 появляется логическая единица. Поз. 91, 92 и 93 (фиг.З) обеспечивают однократный подсчет каждого импульса от датчика 12, т. е. счет в поз. 94 (фиг. 3) выполняется только после
0 смены сигнала на разряде 12 шины 34 с логического нуля на логическую единицу. В поз. 95 (фиг. 3) проверяется равенство текущей координаты а образца искомой а . При его невыполнении микро-ЭВМ 15 пере5 ходит к поз. 90 (фиг.. 3), т. е. выполняется счет текучей координаты аи ожидание координаты 1-й точки измерения ее,В это время на образец 3 действует вращающий момент L (а) (формула (2). Действие вращающего мо0 мента приводит к изгибу упругой балки 24 датчика 7 и к деформации тензорезисторов 25,
Пропорциональная величине деформации балки 24 ЭДС тензомоста 42 усиливает5 ся тензоусилителем 8 и подается на вход 45 АЦП 9, в качестве которого может быть выбран любой 10-разрядный АЦП, например 4222. После выполнения условия а at (поз. 95, фиг. 3) микро-ЭВМ 15 выставляет в
0 соответствии с поз. 96 на разряде 10 шины 35 логическую единицу, которая появляется на входе Пуск 57 АЦП 9, который переходит в режим преобразования аналогового сигнала, поступающего на вход 44 от тензо5 усилителя 8, в цифровой код. На время преобразования на выходе КП шины 46 АЦП 9 выставлен логический нуль, который свидетельствует о том, что преобразование не закончено Микро-ЭВМ 15, выполняя поз.97 г0 (фиг. 3), переходит в режим ожидания сигна- ла КП в виде логической единицы на разряде 10 шины 34 (фиг. 2) После окончания цикла преобразования на выходных разрядах ш-ины 46 АЦП 9 и соответствен5 но на разрядах шины 34 микро ЭВМ 15 выставляется комбинация из логических нулей и единиц в виде двоичного числа, пропорционального аналоговому сигналу на входе 45 АЦП 9. На выходе НКП шины 46
0 АЦП 9 и соответственно на разряде 10 шины 34 появляется логическая единица. Микро-ЭВМ 15 переходит к выполнению поз 98 (фиг, 3), в которой в качестве переменной запоминает двоичную комбина5 цию на разряд 15 шины 33. В поз. 99 на разряде 10 шины 35 выставляется логический нуль, который подается на вход Пуск шины 57 АЦП 9. Этим сигналом АЦП 9 подготавливается к следующему циклу
преобразования. В качестве поз. 100(фиг. 3) выполняется логическое умножение на дво- ичноечисло 10000011111111112. Этим обнуляются разряды , не несущие информации о величине момента. Разряд 15 является знаковым разрядом для всех 16 -разрядных микро-ЭВМ. В поз.101 выполняется подпрограмма управления тормозом 5. В результате выполнения подпрограммы на разрядах шины 35 и соответственно «а разрядах 2 шины 54 ЦАП 16 выставляется комбинация, пропорциональная величине вращающего момента L ( а ) , действующая на образец 3. В результате на выходе 55 ЦАП 16 устанав- ливается напряжение в диапазоне от нуля до максимума. Причем, если момент L (а) направлен по направлению вращения, с его увеличением напряжение растет от половины максимального значения до максимума пропорционально L(«) . Если момент направлен против направления вращения, то величина напряжения на шине 55 с ростом L(a) уменьшается от половины до нуля пропорционально L (a) . Коэффициент с поз 84. (фиг. 4) подбирают таким, чтобы обеспечить равенство величины момента торможения тормоза 5 и вращающего момента, действующего на образец 3. В результате, кроме того, что обеспечивается синхронность вращения дисков 29, 20 и образца 3, достигается при знакопеременной полезной нагрузке L (a.) постоянный нагружающий момент на выходном валу привода 11, что обеспечивает стабилизацию скорости вращения образца 3 и повышение точности контроля, так как точность контроля зависит от стабильности скорости вращения образца. Выполняя поз. 102, микро-ЭВМ-15 осуществляется перевод двоичного числа в десятичную форму LIOI. В поз. 103 выполняется перевод единиц измерения координаты а в радианы. В поз. 104 осуществляются вычисления по формулам (6). В поз. 104 осуществляются вычис- ления по формулам (6). В поз. 105 выполняются сравнения номера текущей координаты i с заданным числом точек измерения N. Если они не равны, т. е. измерения не закончены, номер точки увеличивается на единицу (поз. 106) и цикл измерений повторяется с позиции 89. После выполнения условия поз 105 заканчивается расчет коэффициентов Фурье по формулам (6) (поз. 107) и рассчитывается фаза j-й гар- моники при данном k (поз. 108). В поз. 109 проверяется, выполнялись ли измерения в обоих направлениях вращения. При невыполнении условия поз,109 переменной k
присваивается метка второго направления вращения (поз. 119). После выполнения поз.
111на разряде 12 шины 35 выставляется логический нуль. Ключ 65 блока 13 запирается и вращение реверсивного двигателя 26 останавливается. Затем выполняется поз.
112(фиг. 3), в результате на разряде 13 шины 35 выставляется логическая единица. Открывается ключ 66 блока 13 и реверсивный двигатель 26 начинает вращаться в про- тивоположном направлении. Цикл измерений повторяется с поз. 79 (фиг. 3). Выполнение измерений в двух противоположных направлениях необходимо для того, чтобы учесть погрешности, возникающие от гистерезисных процессов при перемагничи- вании контролируемого образца 3 в постоянном магнитном поле, и систематическую погрешность, равную полуширине отверстия 21 в диске 20. После выполнения позиции 109 (фиг. 3) в поз. 113 выполняется расчет средней фазы гармоники с учетом смены направления вращения по формуле
,п -S3LU3I
И 2
(8)
Затем (поз. 114) выполняется перевод единиц измерения фазы из радиан в импульсы датчика 12. В поз. 115 (фиг. 3) присваивается первый номер угловой координаты направления текстуры образца 3, в поз 116 рассчитывается i-я координата останова с учетом периода гармоники в импульсах Im/j и величины возможного выбега привода 11, который задается заранее. В поз. 117, 118, 119, 120, 121 продолжается счет текущей координаты «образца 3.
В поз. 122 (фиг. 3) проверяется равенство текущей.координаты « , рассчитанной в поз. 116, координате останова «ы Если условия поз. 122 не выполняются, то проверяется условиеа Ooi (поз. 123). Если условие не выполняется, т. е. текущая координата а меньше По , то выполняется переход к поз. 117. Микро-ЭВМ 15, продолжая считать координатуа, ожидает выполнение условия поз 122.
Если же условие поз. 123 выполняется, т. е. текущая координата а больше координаты текстуры «oi , то выбирается следующая координата текстуры Оо (поз. 124, 116) до тех пор, пока не перестанет выполняться условие поз 123. После выполнения условия поз. 122 в поз. 125 на разряд 13 шины 35 выставляется логический нуль. Ключ 66 блока 13 запирается и вращение реверсивного электродвигателя 26 останавливается. В поз. 126 (фиг. 3) обнуляется счетчик времени останова (переменная R). В поз 127, 128, 129, 130, 131 продолжается, счет текущей
координаты а, в поз. 132 считывается время останова R. Это выполняется до тех пор, пока не выполнится условие поз 133 . Величина Т выбирается заранее такой, чтобы время R паузы было гарантировано боль- ше времени останова реверсивного привода 11.
После выполнения условия 133 в поз.
134осуществляется расчет истинной координаты текстуры без учета выбега. В поз.
135проверяется условие a Ooi. Если оно не выполняется, т. е. координата образца 3 после останова не соответствует найденной координате текстуры «ы то на разряд 13 шины 35 выставляется логическая единица. Открывается ключ 66 и восстанавливается вращение реверсивного электродвигателя 26. В поз. 137 проверяется условие . Если условие выполняется, т. е, данной величины выбега реверсивного привода 11 было недостаточно, то в поз.138 величина выбега удваивается, в поз. 124 выбирается следующий номер координаты текстуры I и операции по останову образца 3 повторяются с поз. 116. Если условие 137 не выполни- лось, т. е. текущая координата образца 3
а меньше координаты текстуры OQ , то в поз 139, 140, 141, 142 выполняется расчет угла доворота образца 3 в импульсах с учетом выбега привода 11 в один или два им- пульса в зависимости рт величины разницы между аыи a . Затем с поз«116 осуществляется доворот и останов образца 3 до выполнения условия поз. 135 (фиг. 3). Таким образом, после останова образца 3 обеспе- чивается точное соответствие координаты образца 3 требуемому положению в пределах дискретности датчика 12. После выполнения условия поз 135 (фиг. 3} в поз 143 определяется положение электрографа 36, Если электрограф находится в начальном положении, то нажат конечный выключатель 40 и на разряде 14 шины 34 есть логическая единица. Если электрограф 36 не в начальном положении, то в поз-144 на раз- ряд 14 шины 35 выставляется единица, замыкается ключ 67 и включается реверсивный двигатель 38 маркера 14. Электрограф 36 смещается в начальное положение. После выполнения условия поз. 143 в поз. 145 на разряд 14 шины 35 выставляется логический ноль. Двигатель 38 останавливается. На разряд 15 шины 35 выставляется логическая единица, ключ 68 открывается и выключается двигатель 38. Одновременно открывается ключ 69 и включается реле 70 блока 13. Замыкаются контакты 71 источника 37 маркера 14 и на трансформатор 72 подается напряжение. R ращение двигателя 38 через винтовую пзс
ру 39 преобразуется в линейное перемещение электрографа 36, который, перемещаясь от левого полюса электромагнита 1 к правому через ось образца 3, по пути своим разрядником наносит на торце образца 3 электрографическим способом риску направления текстуры. Движение осуществляется до тех пор, пока не разомкнется датчик 41 и на разряде 11 шины 34 не появится логическая единица. При этом выполняется условие поз. 146. Затем в поз. 147 выставляется логический нуль на разряде 15 шины 34. Ключи 68 и 69 закрываются, вращение реверсивного привода 38 останавливается, прекращается движение электрографа 36 и он обесточивается. В поз. 148, 149 (фиг. 3) осуществляется возврат электрографа 36 маркера 14 в начальное положение. Затем в поз. 150 на разряде 11 шины 35 выставляется логический ноль, ключ 59 запирается, реле 61 выключается, размыкаются контакты 62 и обмотка 64 электромагнита 1 обесточивается.
Цикл измерений закончен. Программа останавливается (поз. 151 фиг. 3).
Введение реверсивного привода вращения, управляемого тормоза, датчиков угла поворота, вращающего момента и начала отсчета угла, тензоусилителя, аналого-цифрового преобразователя блока формирования сигналов, блока кяючей, цифро-аналогового преобразователя и управляющей микрр-ЭВМ позволяет существенно повысить точ.ность определения направления магнитокристаллической -текстуры образцов, имеющих форму тел вращения, за счёт снижения величины случайной погрешности статистическими методами и путем выполнения измерений в различных точках, охватывающих весь диапазон изменения сил, действующих на образец, за счет перевода случайной методической погрешности, обусловленной гистерезисом магнитных свойств, в учтенную систематическую, а также за счет стабилизации .скорости вращения привода при знакопеременных нагрузках.
Формула изобретения
Устройство для определения направления магнитокристаллической текстуры ферромагнитных тел вращения, содержащее источник постоянного тока, выходы которого подключены к намагничивающей обмотке электромагнита, держатель образца и маркер направлений, отличающееся тем, что, с целью повышения точности, оно снабжено реверсивным приводом вращения с датчиками угла и начала отсчета и регулируемым электромагнитным тормозом, блоком формирования, блоком ключей, цифроаналоговым преобразователем, управляющей микро-ЭВМ и последовательно соединенными датчиком момента, тензоусилителем и аналого-цифровым преобразователем, выход которого подключен к шине ввода управляющей микро-ЭВМ и выходу блока формирования, входы которого соединены с выходами датчиков угла и начала отсчета и маркера, при этом вход управления регулируемого электромагнитного тормоза под0
ключей к выходу циф роаналогоаого преобразователя, вход которого подключен к шине ввода управляющей микро-ЗВМ и входу блока ключей, выходы которого соединены с управляющими входами реверсивного привода вращения, источника постоянного тока и маркера направлений, а держатель образца кинематически соединен с датчиком момента, который кинематически соединен с реверсивным приводом вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля прочности перемычки | 1990 |
|
SU1798089A1 |
| Устройство регулировки осветительно-проекционных систем | 1987 |
|
SU1580307A1 |
| Интегрирующий аналого-цифровой преобразователь | 1984 |
|
SU1211886A2 |
| Устройство для контроля печатных плат | 1986 |
|
SU1472929A1 |
| Функциональный преобразователь многих переменных | 1990 |
|
SU1742836A1 |
| Устройство телемеханики | 1984 |
|
SU1304050A1 |
| Датчик испытательных текстов | 1988 |
|
SU1571786A1 |
| Устройство для считывания графической информации с экрана электронно-лучевой трубки | 1989 |
|
SU1615759A1 |
| Программируемый генератор импульсов | 1985 |
|
SU1298869A2 |
| Устройство для считывания информации | 1989 |
|
SU1693617A1 |
Изобретение относится к магнитным измерениям и может быть использовано для определения направления магнитокристал- лической текстуры ферромагнитных образцов, имеющих форму тел вращения. Цель изобретения - повышение точности определения направления магнитокристалличе- ской текстуры. Устройство включает управляющую ЭВМ, аналого-цифровой и цифроаналоговый преобразователи. Процесс реверсивного вращения образца контролируется с помощью датчиков угла, начала отсчета и момента, причем реверсивный привод выполнен с регулируемым тормозом. Обработка измерительной информации осуществляется в ЭВМ, после чего маркер автоматически наносит риску на образец.4 ил.
фиг1
Я
SB
Фиг. 2
s %
г 04
85 V/9 W9+111111W9
-86 /u/..35+W2
-87
( Возврат }
w2 -w2-c
