1
Изобретение относится к автоматике и вычислительной технике и может быть использовано дпя оптического считывания и контроля проводящего рисунка печатных плат.
Цель изобретения - повышение надежности и быстродействия устройства за счет автоматизации .операций контроля.
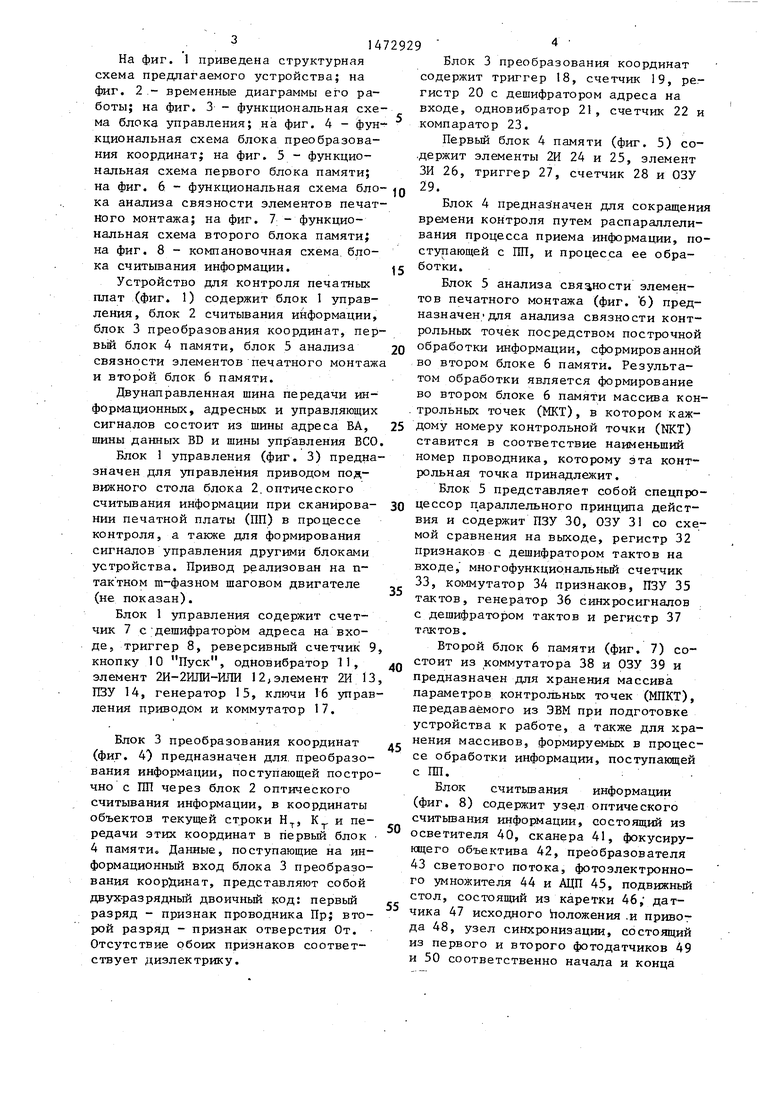
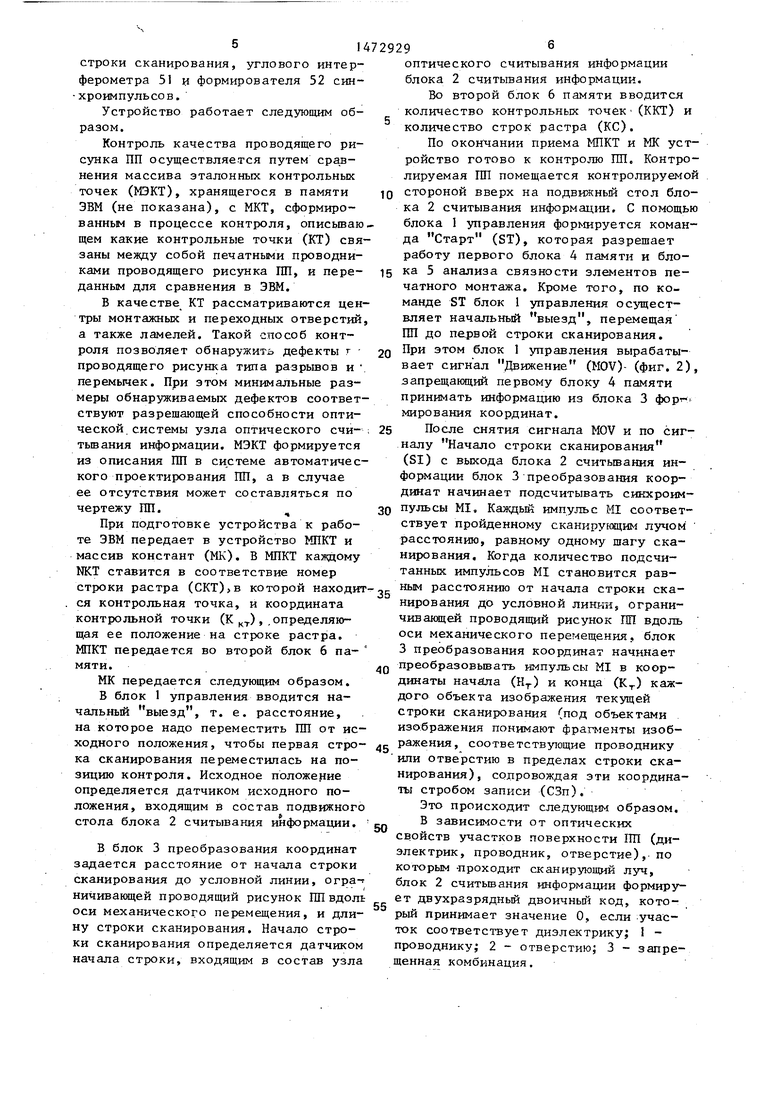
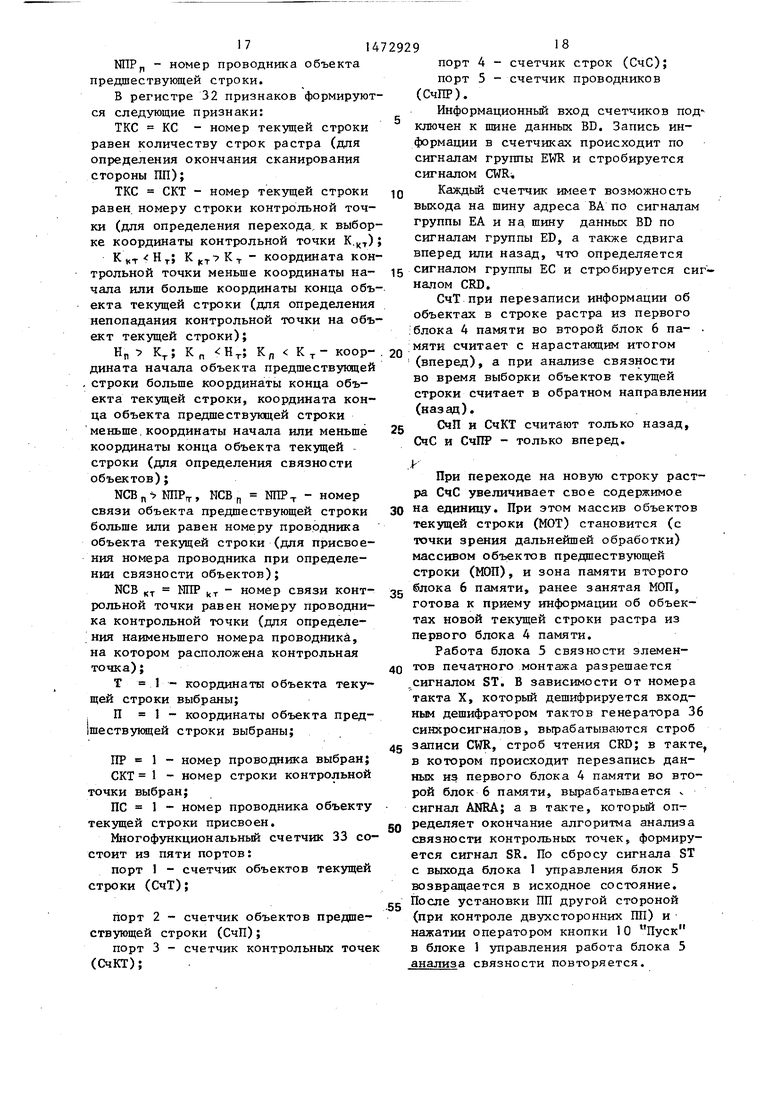
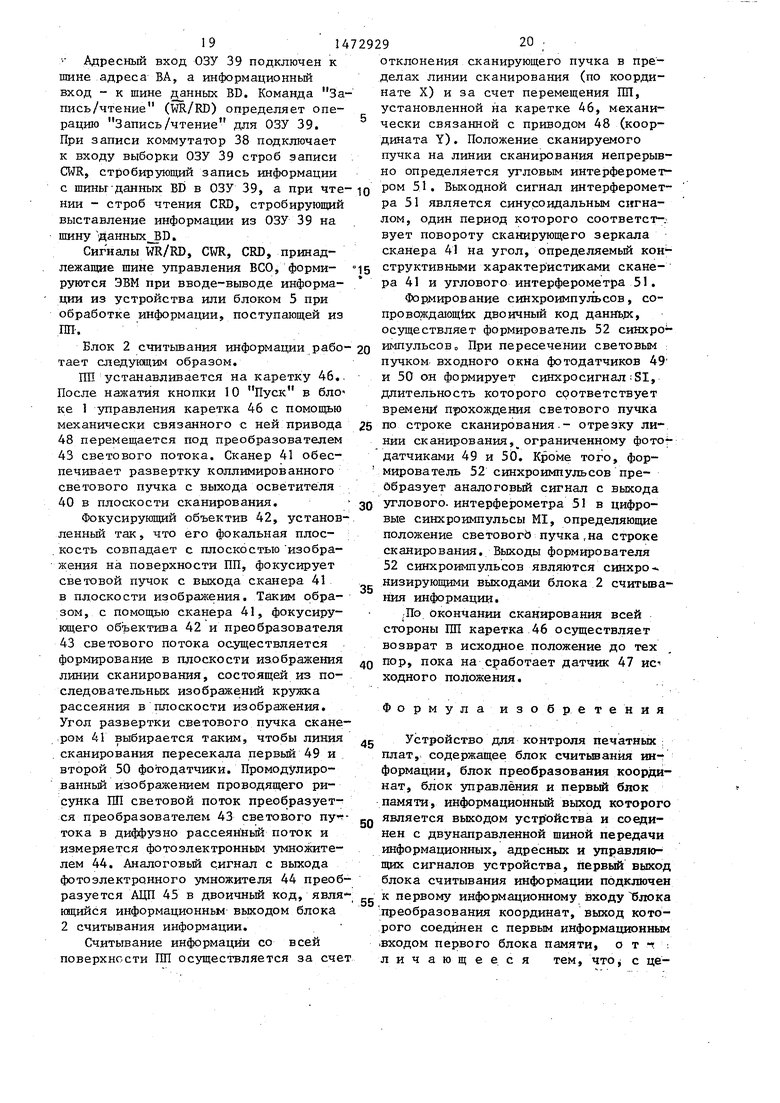
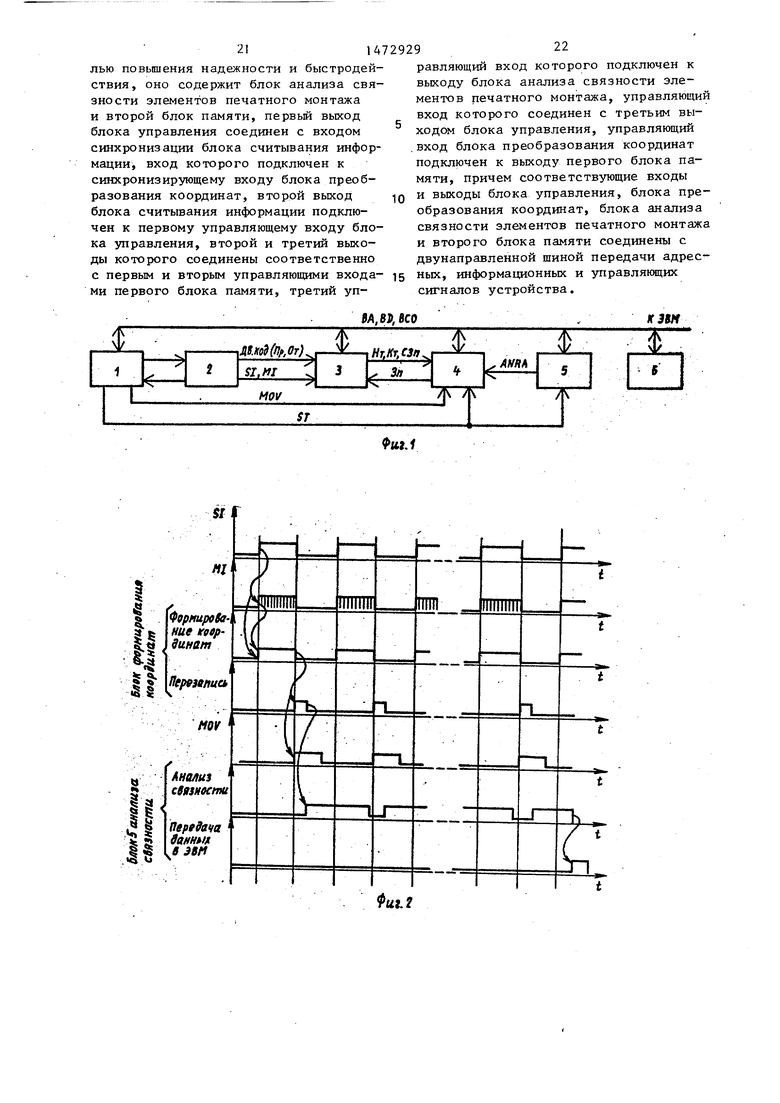
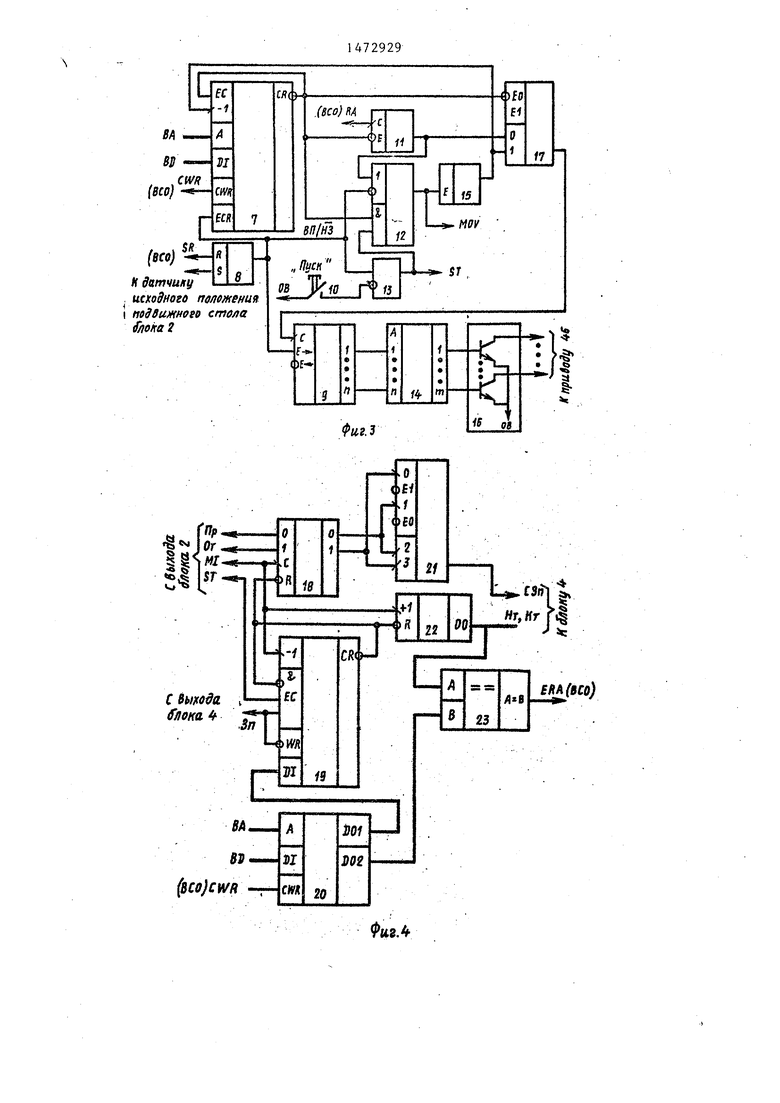
На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 - временные диаграммы его работы; на фиг. 3 - функциональная схема блока управления; на фиг. 4 - функциональная схема блока преобразования координат; на фиг. 5 - функциональная схема первого блока памяти;
на фиг. 6 - функциональная схема бло-
ка анализа связности элементов печатного монтажа; на фиг. 7 - функциональная схема второго блока памяти; на фиг. 8 - компановочная схема блока считывания информации.
Устройство для контроля печатных плат (фиг. 1) содержит блок 1 управления, блок 2 считывания информации, блок 3 преобразования координат, перБлок 3 преобразования координат содержит триггер 18, счетчик 19, регистр 20 с дешифратором адреса на входе, одновибратор 21, счетчик 22 и компаратор 23.
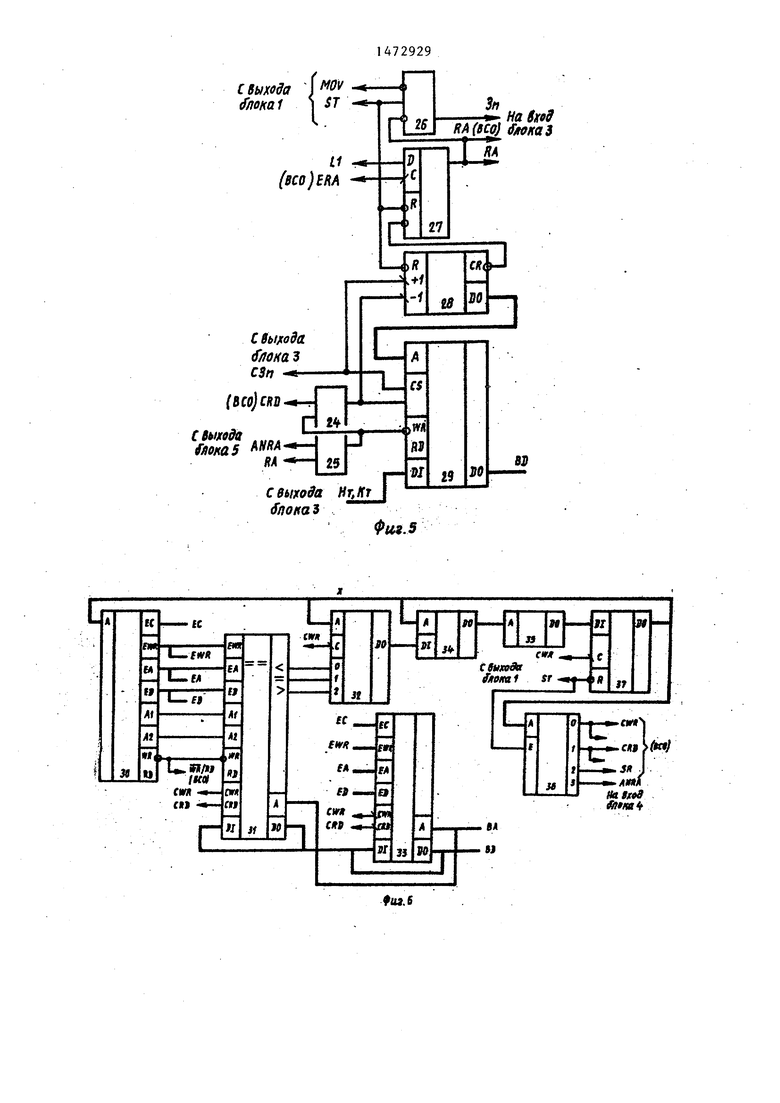
Первый блок 4 памяти (фиг. 5) содержит элементы 2И 24 и 25, элемент ЗИ 26, триггер 27, счетчик 28 и ОЗУ
29.
Блок 4 предназначен для сокращения времени контроля путем распараллеливания процесса приема информации, поступающей с ПП, и процесса ее обработки.
Блок 5 анализа связности элементов печатного монтажа (фиг. 6) предназначен-для анализа связности контрольных точек посредством построчной
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ | 1992 |
|
RU2045781C1 |
| Устройство для селекции дефектов изображений объектов | 1988 |
|
SU1631562A1 |
| Устройство для селекции изображений объектов | 1989 |
|
SU1777651A3 |
| Устройство для селекции изображений объектов | 1986 |
|
SU1429141A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ | 1992 |
|
RU2051416C1 |
| Устройство для подсчета изображений объектов | 1988 |
|
SU1640720A1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ДЕФЕКТОВ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН БОЛЬШОЙ ПЛОЩАДИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013820C1 |
| Устройство для селекции изображений объектов | 1983 |
|
SU1188765A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1981 |
|
SU1275520A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1981 |
|
SU1275521A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для контроля печатных плат. Цель изобретения - повышение надежности и быстродействия за счет автоматизации операций контроля. Устройство содержит блок управления (БУ), блок считывания информации (БСИ) с узлом оптического считывания информации (УОСИ), подвижным столом с контролируемым объектом (ПС) и узлом синхронизации (УС), блок преобразования координат (БПК), первый блок памяти (БП 1), второй блок памяти (БП 2), блок анализа связности (БАС) элементов печатного монтажа. Блоки устройства выполнены и соединены между собой таким образом, что образуют асинхронную конвейерную схему обработки информации о проводящем рисунке печатной платы (ПП) такую, что после каждого этапа обработки снижается объем хранимой информации и одновременно выделяется структура связей проводящего рисунка. При контроле ПП помещается на ПС БСИ, УОСИ осуществляет растровое оптическое считывание информации. БПК, синхронизируемый сигналами УС, формирует координаты элементов изображения по каждой строке растра и записывает их в БП 1, откуда сформированная информация переписывается в БП 2. БАС попарно обрабатывает координаты элементов изображения текущей и предшествующей строк растра и формирует в БП 2 массив, описывающий структуры связей проводящего рисунка ПП. После окончания считывания и анализа связей элементов изображения растра всей ПП БАС выставляет в ЭВМ запрос на обслуживание. ЭВМ считывает из БП 2 массив связности, сравнивает его с эталонным описанием и формирует протокол контроля. 8 ил.
вый блок 4 памяти, блок 5 анализа20 обработки информации, сформированной
связности элементов печатного монтажа и второй блок 6 памяти.
Двунаправленная шина передачи информационных, адресных и управляющих сигналов состоит из шины адреса ВА, шины данных BD и шины управления ВСО.
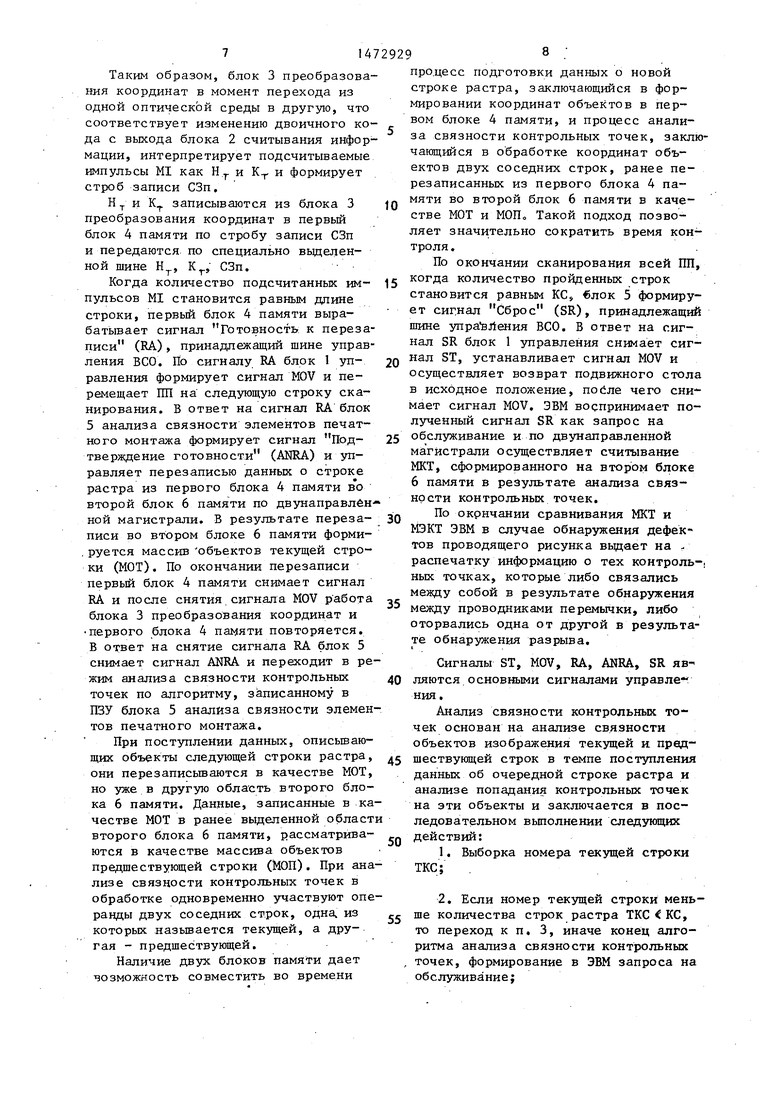
Блок 1 управления (фиг. 3) предназначен для управления приводом подвижного стола блока 2.оптического считывания информации при сканировании печатной платы (ПП) в процессе контроля, а также для формирования сигналов управления другими блоками устройства. Привод реализован на п- так тном m-фазном шаговом двигателе (не показан).
Блок 1 управления содержит счетчик 7 с дешифратором адреса на входе, триггер 8, реверсивный счетчик 9, кнопку 10 Пуск, одновибратор 11, элемент 2И-2ИЛИ-ИЛИ 12,элемент 2И 13, ПЗУ 14, генератор 15, ключи 16 управления приводом и коммутатор 17.
Блок 3 преобразования координат (фиг. 4) предназначен для преобразования информации, поступающей построчно с ПП через блок 2 оптического считывания информации, в координаты объектов текущей строки Нт, Кг и передачи этих координат в первый блок 4 памяти. Данные, поступающие на информационный вход блока 3 преобразования координат, представляют собой двух-разрядный двоичный код: первый разряд - признак проводника Пр; второй разряд - признак отверстия От. Отсутствие обоих признаков соответствует диэлектрику.
во втором блоке 6 памяти. Результатом обработки является формирование во втором блоке 6 памяти массива контрольных точек (МКТ), в котором каждому номеру контрольной точки (NKT) ставится в соответствие наименьший номер проводника, которому эта контрольная точка принадлежит.
Блок 5 представляет собой спецпроцессор параллельного принципа действия и содержит ПЗУ 30, ОЗУ 31 со схемой сравнения на выходе, регистр 32 признаков с дешифратором тактов на входе, многофункциональный счетчик 33, коммутатор 34 признаков, ПЗУ 35 тактов, генератор 36 синхросигналов
0
5
с дешифратором тактов и регистр 37 тяктов.
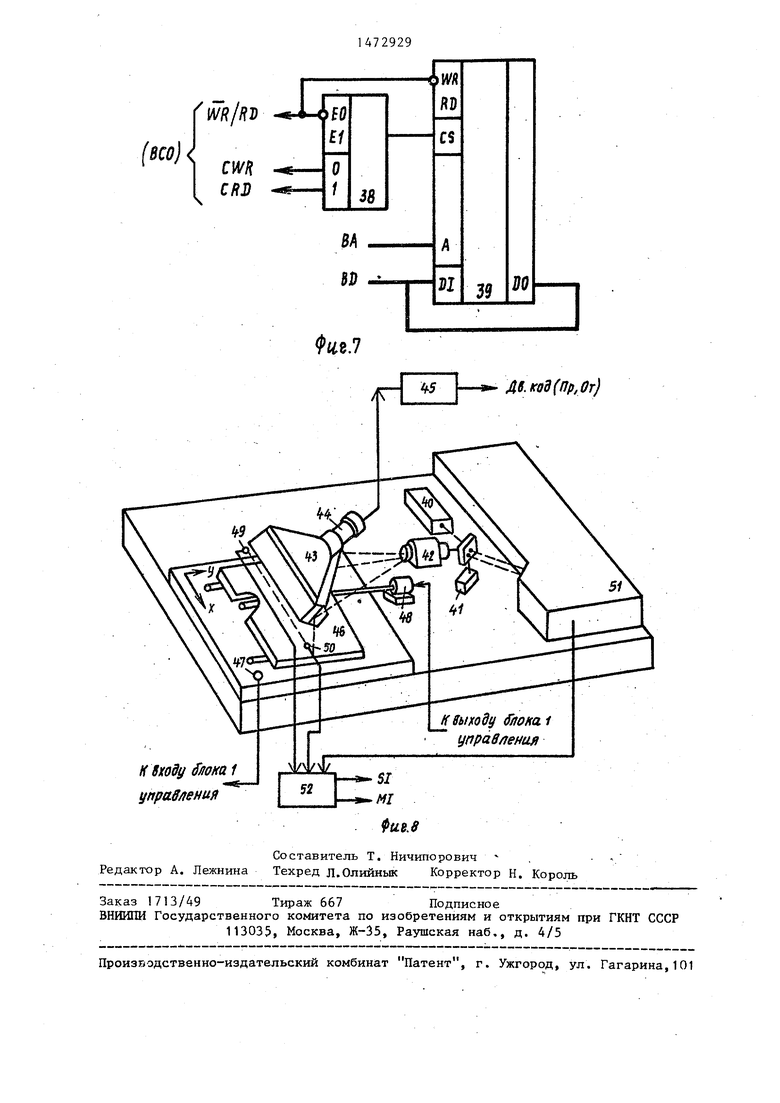
Второй блок 6 памяти (фиг. 7) состоит из коммутатора 38 и ОЗУ 39 и предназначен для хранения массива параметров контрольных точек (МПКТ), передаваемого из ЭВМ при подготовке устройства к работе, а также для хранения массивов, формируемых в процессе обработки информации, поступающей с ПП.
Блок считывания информации (фиг. 8) содержит узел оптического считывания информации, состоящий из осветителя 40, сканера 41, фокусирующего объектива 42, преобразователя 43 светового потока, фотоэлектронного умножителя 44 и АЦП 45, подвижный стол, состоящий из каретки 46, дат- чика 47 исходного положения .и привода 48, узел синхронизации, состоящий из первого и второго фотодатчиков 49 и 50 соответственно начала и конца
0
строки сканирования, углового интерферометра 51 и формирователя 52 син- хроимпульсов.
Устройство работает следующим образом.
Контроль качества проводящего рисунка ПП осуществляется путем сравнения массива эталонных контрольных точек (МЭКТ), хранящегося в памяти ЭВМ (не показана), с МКТ, сформированным в процессе контроля, описывающем какие контрольные точки (КГ) связаны между собой печатными проводниками проводящего рисунка ПП, и пере- данным для сравнения в ЭВМ.
В качестве КТ рассматриваются центры монтажных и переходных отверстий, а также ламелей. Такой способ контроля позволяет обнаружить дефекты г проводящего рисунка типа разрывов и перемычек. При этом минимальные размеры обнаруживаемых дефектов соответствуют разрешающей способности оптической системы узла оптического счи- тывания информации. МЭКТ формируется из описания ПП в системе автоматического проектирования ПП, а в случае ее отсутствия может составляться по чертежу ПП.,
При подготовке устройства к работе ЭВМ передает в устройство МПКТ и массив констант (МК). В МПКТ каждому ЖТ ставится в соответствие номер
строки растра (СКТ),в которой находит-,5 ным расстоянию от начала строки сканирования до условной линия, ограничивающей проводящий рисунок ПП вдоль оси механического перемещения, блок 3 преобразования координат начинает преобразовывать импульсы Ml в координаты нач&ла (Нт) и конца (Кт) каждого объекта изображения текущей строки сканирования (под объектами изображения понимают фрагменты изображения, соответствующие проводнику или отверстию в пределах строки сканирования), содровождая эти координаты стробом записи (СЗп).
ся контрольная точка, и координата контрольной точки (К кт) ,, определяющая ее положение на строке растра. МПКТ передается во второй блок 6 па- мяти.
МК передается следующим образом.
В блок 1 управления вводится начальный выезд, т. е. расстояние, на которое надо переместить ПП от исходного положения, чтобы первая стро- ка сканирования переместилась на позицию контроля. Исходное положение определяется датчиком исходного положения, входящим в
состав подвижного стола блока 2 считывания информации.
В блок 3 преобразования координат задается расстояние от начала строки сканирования до условной линии, огра- ничивающей проводящий рисунок ПП вдоль оси механического перемещения, и длину строки сканирования. Начало строки сканирования определяется датчиком начала строки, входящим в состав узла
оптического считывания информации блока 2 считывания информации.
Во второй блок 6 памяти вводится количество контрольных точек(ККТ) и количество строк растра (КС).
По окончании приема МПКТ и МК устройство готово к контролю ПП. Контролируемая ПП помещается контролируемой стороной вверх на подвижный стол блока 2 считывания информации, С помощью блока 1 управления формируется команда Старт (ST), которая разрешает работу первого блока 4 памяти и блока 5 анализа связности элементов печатного монтажа. Кроме того, по команде ST блок 1 управления осуществляет начальный выезд, перемещая ПП до первой строки сканирования. При этом блок 1 управления вырабатывает сигнал Движение (MOV)- (фиг. 2), запрещающий первому блоку 4 памяти принимать информацию из блока 3 форг-. мирования координат.
После снятия сигнала MOV и по сигналу Начало строки сканирования (SI) с выхода блока 2 считывания информации блок 3 преобразования координат начинает подсчитывать синхроимпульсы Ml, Каждый импульс Ml соответствует пройденному сканирующим лучом расстоянию, равному одному шагу сканирования. Когда количество подсчитанных импульсов Ml становится равным расстоянию от начала строки ска
нирования до условной линия, ограничивающей проводящий рисунок ПП вдоль оси механического перемещения, блок 3 преобразования координат начинает преобразовывать импульсы Ml в координаты нач&ла (Нт) и конца (Кт) каждого объекта изображения текущей строки сканирования (под объектами изображения понимают фрагменты изображения, соответствующие проводнику или отверстию в пределах строки сканирования), содровождая эти координаты стробом записи (СЗп).
Это происходит следующим образом.
В зависимости от оптических свойств участков поверхности ПП (диэлектрик, проводник, отверстие), по которым -проходит сканирующий луч, блок 2 считывания информации формирует двухразрядный двоичный код, который принимает значение 0, если участок соответствует диэлектрику; 1 - проводнику; 2 - отверстию; 3 - запрещенная комбинация.
Таким образом, блок 3 преобразования координат в момент перехода из одной оптической среды в другую, что соответствует изменению двоичного ко- да с выхода блока 2 считывания информации, интерпретирует подсчитываемые импульсы Ml как Н т и Кт и формирует строб записи СЗп.
Нт и Кт записываются из блока 3 преобразования координат в первый блок 4 памяти по стробу записи СЗп и передаются по специально выделенной шине Нт, Кг, СЗп.
Когда количество подсчитанных им- пульсов Ml становится равным длине строки, первый блок 4 памяти вырабатывает сигнал Готовность к перезаписи (RA), принадлежащий шине управления ВСО. По сигналу RA блок 1 уп- равления формирует сигнал MOV и перемещает Ж на следующую строку сканирования. В ответ на сигнал RA блок 5 анализа связности элементов печатного монтажа формирует сигнал Под- тверждение готовности (ANRA) и управляет перезаписью данных о строке растра из первого блока 4 памяти во второй блок 6 памяти по двунаправленной магистрали. В результате переза- писи во втором блоке 6 памяти формируется массив объектов текущей строки (МОТ). По окончании перезаписи первый блок 4 памяти снимает сигнал RA и после снятия сигнала MOV работа блока 3 преобразования координат и первого блока 4 памяти повторяется. В ответ на снятие сигнала RA блок 5 снимает сигнал ANRA и переходит в режим анализа связности контрольных точек по алгоритму, записанному в ШУ блока 5 анализа связности элементов печатного монтажа.
При поступлении данных, описывающих объекты следующей строки растра, они перезаписываются в качестве МОТ, но уже в другую область второго блока 6 памяти. Данные, записанные в качестве МОТ в ранее выделенной област второго блока 6 памяти, рассматриваются в качестве массива объектов предшествующей строки (МОП). При анализе связности контрольных точек в обработке одновременно участвуют операнды двух соседних строк, одна, из которых называется текущей, а другая - предшествующей.
Наличие двух блоков памяти дает возможность совместить во времени
0 5 0 0
5
0
процесс подготовки данных о новой строке растра, заключающийся в формировании координат объектов в первом блоке 4 памяти, и процесс анализа связности контрольных точек, заключающийся в обработке координат объектов двух соседних строк, ранее перезаписанных из первого блока 4 памяти во второй блок 6 памяти в качестве МОТ и МОП Такой подход позволяет значительно сократить время контроля .
По окончании сканирования всей ПП, когда количество пройденных строк становится равным КС, блок 5 формирует сигнал Сброс (SR), принадлежащий шине управления ВСО. В ответ на сигнал SR блок 1 управления снимает сигнал ST, устанавливает сигнал MOV и осуществляет возврат подвижного стола в исходное положение, после чего снимает сигнал MOV. ЭВМ воспринимает полученный сигнал SR как запрос на обслуживание и по двунаправленной магистрали осуществляет считывание МКТ, сформированного на втором блоке 6 памяти в результате анализа связности контрольных точек.
По окрнчании сравнивания МКТ и МЭКТ ЭВМ в случае обнаружения дефектов проводящего рисунка выдает на - распечатку информацию о тех контроль-, ных точках, которые либо связались между собой в результате обнаружения между проводниками перемычки, либо оторвались одна от другой в результате обнаружения разрыва.
Сигналы ST, MOV, RA, ANRA, SR являются основными сигналами управле ния.
Анализ связности контрольных точек основан на анализе связности объектов изображения текущей и. предшествующей строк в темпе поступления данных об очередной строке растра и анализе попадания контрольных точек на эти объекты и заключается в последовательном выполнении следующих действий:
п. 5;
п. 6, иначе переход к п. 7;
Критерием связности двух объектов текущей и предшествующей строк является условие, когда координаты одного объекта проецируются на координаты другого объекта.
Если два проводника сливаются в один проводник, то в месте слияния проводников объект текущей строки оказывается связанным с двумя объектами предшествующей строки, принадлежащими разным проводникам. Для того, чтобы проанализировать подобную ситуацию, когда путем слияния связываются разные проводники, во втором блоке 6 памяти формируется массив связности проводников (МСВ), который описывает, какие проводники связаны друг с другом. С этой целью вводятся два понятия: номер проводника ЩР и номер связи NCB. В МСВ каждому номеру проводника ставится в соответствие его номер связи.
Если в обработке находится объект текущей строки, который не связан ни с одним из объектов предшествующей строки, то ему присваивается очередной порядковый номер проводника, на0
5
0
5
чиная с единицы, и номер связи, равный номеру проводника.
В случае, когда объект текущей строки связан с объектом предшеству- 5 ющей строки и ШТРт $ NCB,,, то выполняется операция присвоения, которая заключается в следующем:
если МТРТ NCBn, то в качестве но- 0 вого номера проводника и нового номера связи объекту текущей строки присваивается КПРт NCBn и NCBT NCBh;
если Ш1РТ КСВП, то в качестве нового номера связи объекту предшеству- 5 ющей строки присваивается NCB п еМ1Рт.
Присвоение объекту текущей строки номера проводника заключается в записи в МОТ номера проводника по адресу, равному порядковому номеру объек- о та в строке.
Присвоение объекту номера связи заключается в записи в МСВ номера связи по адресу, равному номеру проводника объекта.
$;По окончании,анализа связности
объекта текущей строки с объектом предшествующей строки осуществляется переход к п. 12.
Критерием попадания контрольной точки является условие, когда координата контрольной точки К fcT проецируется на отрезок, определяемый коор- 5 динатамй рассматриваемого объекта текущей строки Нт, Кт.
Если контрольная точка, принадлежащая текущей строке растра, не попала ни -на один из объектов текущей строки, то ей присваивается номер проводника , равный нулю, что характеризует ее как оторвавшуюся от проводящего рисунка контролируемой стороны ПП.
Если контрольная точка попала на объект гекущей строки, то ей присваивается номер проводника, равный наименьшему номеру связи из МСВ, соответствующий номеру проводника объекта, на который эта контрольная точка попала.
Присвоение контрольной точке номера проводника заключается в записи в МКТ номера проводника по адресу, равному порядковому номеру контрольной точки.
После анализа попадания контрольной точки на объект текущей строки, если количество проанализированных
1114
контрольных точек стало равно заданному количеству контрольных точек (ККТ), то переход к выборке координат следующего объекта текущей стро- ки по п. 5, в противном случае осуществляется выборка координат следующей контрольной точки по п. 3.
Описанные действия производятся для всех контрольных точек проводя- щего рисунка контролируемой стороны ГШ, в результате чего в МКТ каждой контрольной точке ставится в соответствие минимальный номер связи проводника, которому эта контрольная точка принадлежит.
Таким образом, устройство обеспечивает выполнение следующих функций: фиксация контролируемой 1Ш ,в заданном положении;
прием из ЭВМ информации, настраивающей устройство на контроль конкретного типа ПП;
оптическое растровое считывание изображения проводящего рисунка ПП и преобразование аналогового сигнала каждой строки растра в цифровую форму;
формирование синхроимпульсов, сопровождающих считываемую информацию;
формирование координат, описывающих положение объектов изображения на каждой строке растра;
анализ связности контрольных точек в темпе поступления данных по строкам растра;
передача в ЭВМ МКТ по контролируемой стороне ПП.
ЭВМ обеспечивает выполнение следующих функций: передача в устройство МПКТ и МК; прием из устройства МКТ; сравнение МКТ с МЭКТ и формирование на основе сравнения протокола контроля;
выводы протокола контроля; формирование и хранение эталонных описаний по каждому типу контролируемых ПП, а именно МПКТ, МК, МЭКТ для каждой стороны ПП.
При предварительной подготовке устройства к работе ЭВМ, обращаясь по адресу блока 1 управления, который дешифрируется входным дешифратором адреса счетчика 7, выставляет на шину данных BD данные о начальном
выезде, сопровождая их стробом CWR Полученные данные записываются в счетчик 7.
9
12
В исходном положении подвижного стола, которое определяется датчиком исходного положения, входящим в состав блока 2 считывания информации, триггер 8 вырабатывает сигнал вперед/назад (ВП/НЗ), соответствующий уровню логической единицы. Этот сигнал определяет режим счета реверсивного счетчика 9 как счет с нарастающим итогом (вперед).
При нажатии оператором кнопки 10 Пуск элемент 13 формирует сигнал ST, который проходит на выход элемента 1 2 в виде сигнала MOV, разрешающего работу генератора IJj. Импульсы с выхода генератора 15 поступают на счетный вхюд счетчика 7 и через коммутатор 17 на счетньй вход реверсивного счетчика 9. Счетчик 7 уменьшает свое содержимое, а реверсивный счетчик 9 увеличивает свое содержи- мое на единицу по каждому импульсу с выхода генератора 15„ Количество разрядов п реверсивного счетчика 9 соответствует количеству тактов управления шагового двигателя и определяет адрес ПЗУ 14, в котором предварительно зашита программа включения фаз шагового, двигателя. Поэтому количество выходных разрядов ПЗУ 14 соответствует количеству фаз. Таким образом, в зависимости от номера такта ПЗУ 14 включает посредством ключей 16 управления ту или иную комбинацию шагового двигателя привода подвижного стола.
Нулевое состояние счетчика 7 соответствует перемещению подвижного стола на расстояние, равное начальному выезду. При этом сигнал переноса
с выхода счетчика 7 блокирует его работу по счетному входу, переключает входы коммутатора 17 и разрешает работу одновибратора 11.
По окончании записи данных об объектах строки растра из блока 3 преобразования координат в первый блок 4 памяти в момент перехода в режим перезаписи этих данных из первого блока 4 памяти во второй блок 6 памяти по сигналу RA одновибратор 11 вырабатывает одиночный импульс, который проходит на выход элемента 12 в виде
сигнала MOV и через коммутатор 17 на счетньй вход реверсивного счетчика 9. В результате подвижный стол перемещает ПП на следующую строку растра по каждому сигналу RA.
По окончании контроля стороны ПП по сигналу SR триггер 8 устанавливает сигнал ВП/НЗ, соответствующий уровню логического нуля. По этому сигналу реверсивный счетчик 9 меняет направление счета, что соответствует перемещению подвижного стола назад в исходное положение, элемент 13 снимает сигнал ST, элемент 12 вырабатывает сигнал MOV, блокируется сигнал переноса с выхода счетчика 7, генератор 15 подключается через коммутатор 17 к счетному входу реверсивного счетчика 9.
Таким образом, подвижный стол перемещается назад до тех пор, пока не сработает датчик исходного положения, в результате чего триггер 8 снова
устанавливается в положение Вперед- т 20 ет сигнал Зп, и блок 3 преобразова- что соответствует исходному состоянию ния координат возвращается в исходное- схемы блока 1 управления.состояние.
При предварительной подготовкеПервый блок 4 памяти сначала запиустройства к работе ЭВМ, обращаясьсывает координаты объектов текущей
25 строки Нт и Кт, поступающие из блока
по адресу блока 3 преобразования координат, который дешифрируется входным дешифратором адреса регистра 20, последовательно выставляет на шину данных BD данные о расстоянии от начала строки до условной линии, ограничивающей проводящий рисунок ПП вдоль оси механического перемещения, и длине строки, сопровождая их стробом CWR. Полученные данные записываются в регистр 20. Данные о расстоянии от начала строки сканирования до условной линии перезаписываются в счетчик 19, а данные о длине строки поступают на один из входов компаратора. 23.
В режиме контроля при поступлении сигнала записи (Зп) с выхода шервого блока 4 памяти по синхросигналу SI, начало которого соответствует моменту прохождения луча через датчик начала строки сканирования, счетчик 19 уменьшает свое содержимое на единицу по каждому синхроимпульсу Ml. Нулевое состояние счетчика 19 соответствует пройденному лучом расстоянию от начала строки сканирования до условной линии, ограничивающей проводящий рисунок ПП вдоль оси механического перемещения. При этом сигнал переноса с выхода счетчика 19 блокирует его работу по счетному входу и разрешает работу триггера 18 и счетчика 22 по установочным входам.
30
35
40
45
50
55
3 преобразования координат, а затем по окончании обработки предшествующей строки перезаписьюает эту информацию во второй блок 6 памяти в виде массива объектов текущей строки (МОТ).
Так как процесс записи данных об объектах строки сканирования происходит/одновременно с обработкой двух предшествующих строк, когда информация передается по шине данных BD, для перезаписи данных из первого блока 4 памяти во второй блок 6 памяти выделяется внутренняя шина данных Нт, Kt, СЗп.
При поступлении сигнала ST и по окончании сигнала MOV с выхода блока 1 управления после перемещения ПП на позицию контроля элемент 26 вырабатывает сигнал Зп. В режиме записи данных о координатах объектов строки , сканирования Н т и Кт, поступающие по внутренней шине данных с выхода блока 3 преобразования координат, записываются в ОЗУ 29 по стробам СЗп.
Счетчик 28 увеличивает свое состояние на единицу по каждому сигналу СЗп, подсчитывая , количество объектов в строке сканирования, которое используется в качестве адреса ОЗУ 29.
По окончании режима записи по сигналу ERA с выхода блока 3 формирования координат триггер 27 вырабатывает сигнал RA, по которому снимается сигнал Зп. При поступлении ответного
В моменты изменения двоичного кода на информационном входе блока 3 преобразования координат, что фиксируется триггером 18, одновибратор 21 формирует строб записи (СЗп).
Счетчик 22 увеличивает свое содержимое на единицу по каждому синхроимпульсу Ml, фиксируя координату поло- жения луча вдоль строки сканирования. В моменты изменения двоичного кода пройденное лучом вдоль строки сканирования расстояние интерпретируется как координаты объектов текущей стро- ки Н т и Кт.
Когда пройденное лучом расстояние становится равным длине строки, компаратор 23 формирует сигнал ERA, по которому первый блок 4 памяти снима-
0
5
0
5
0
5
3 преобразования координат, а затем по окончании обработки предшествующей строки перезаписьюает эту информацию во второй блок 6 памяти в виде массива объектов текущей строки (МОТ).
Так как процесс записи данных об объектах строки сканирования происходит/одновременно с обработкой двух предшествующих строк, когда информация передается по шине данных BD, для перезаписи данных из первого блока 4 памяти во второй блок 6 памяти выделяется внутренняя шина данных Нт, Kt, СЗп.
При поступлении сигнала ST и по окончании сигнала MOV с выхода блока 1 управления после перемещения ПП на позицию контроля элемент 26 вырабатывает сигнал Зп. В режиме записи данных о координатах объектов строки , сканирования Н т и Кт, поступающие по внутренней шине данных с выхода блока 3 преобразования координат, записываются в ОЗУ 29 по стробам СЗп.
Счетчик 28 увеличивает свое состояние на единицу по каждому сигналу СЗп, подсчитывая , количество объектов в строке сканирования, которое используется в качестве адреса ОЗУ 29.
По окончании режима записи по сигналу ERA с выхода блока 3 формирования координат триггер 27 вырабатывает сигнал RA, по которому снимается сигнал Зп. При поступлении ответного
сигнала ANEA с выхода блока 5 по сигналу с выхода элемента 25 ОЗУ 29 пе-- реводится в режим чтения. Строб чтения CRD, проходящий через элемент 24 на вход выборки ОЗУ 29, стробирует выставление информации на шину данных BD. Счетчик 28 уменьшает свое содержимое на единицу по каждому сигналу CRD. Нулевое состояние счетчика 28 соответствует окончанию режима перезаписи данных из первого блока 4 памяти во второй блок 6 памяти. При этом сигнал переноса с выхода счетчика 28 устанавливает триггер 27 в исходное состояние, при котором снима- ется сигнал RA.
После перемещения ПП на следующую строку растра работа первого блока 4 памяти повторяется.
По окончании контроля стороны ПП по снятию сигнала ST первьй блок 4 памяти возвращается в исходное состояние.
Блок 5 анализа связности элементов печатного монтажа работает по . тактам X, чередование которых обусловлено алгоритмом анализа связности контрольных точек, зашитым в ПЗУ 30
10
адреса БА по сигналам гр шину данных по сигналам Запись/чтение в ОЗУ 31 о командой WR/RD. Запись в водится по сигналам груп чем в течение такта ПЗУ ния может выдать сигнал записи только на один из этом другой выполняет оп ния. Запись стробируется CWR, а чтение - сигналом да генератора 36 синхрос ты имеют выход на схему
15 которой происходит сравн тов, поступающих по шин соответствующий порт. В от номера такта X, котор ется входным дешифраторо
20 гистра 32 признаков, рез нения ., , записывае 32 признаков по сигналу гично в зависимости от н X коммутатор 34 признако
25 к адресному входу ПЗУ 35 ответствующую часть приз да регистра 3 пр изнаков тов формирует номер след X, который по сигналу CW
управления и ПЗУ 35 тактов. В каждом 30 ся в регистр 37 тактов.
В первьй порт ОЗУ 31 следующие реквизиты:
такте выполняется определенный набор операций, например выборка реквизита из второго блока 6 памяти в ОЗУ 31, либо перезапись реквизита, полученного в результате обработки в данном такте -в обратном направлении, сравнение хранимых в ОЗУ 31 реквизитов с последующей записью результата срав- нения в регистр 32 признаков, продвижение на единицу вперед или назад многофункционального счетчика 33.
В зависимости.от номера такта X, поступающего на адресный вход ПЗУ 30 управления, на его выходе формируютс следующие управляющие воздействия:
сигналы группы разрешения счета ЕС
сигналы группы разрешения записи EWRJ
сигналы группы разрешения выхода на шину адреса ЕА;
сигналы группы разрешения выхода на шину данных ED;
две группы внутренних адресов А1 и А2, поступающих на вход ОЗУ 31;
команда Запись/чтение (WR/RD).
ОЗУ 31 состоит из двух портов. Каждый порт управляется по внутренним адресам А1 и А2 соответственно и имеет возможность выхода на шину
адреса БА по сигналам группы ЕА и на шину данных по сигналам группы EWR, Запись/чтение в ОЗУ 31 определяется командой WR/RD. Запись в порты производится по сигналам группы ЕШ, причем в течение такта ПЗУ 30 управления может выдать сигнал разрешения записи только на один из портов, при этом другой выполняет операцию чтения. Запись стробируется сигналом CWR, а чтение - сигналом CRD с выхода генератора 36 синхросигналов. Порты имеют выход на схему сравнения, в
5 которой происходит сравнение реквизитов, поступающих по шине данных BD в соответствующий порт. В зависимости от номера такта X, который дешифрируется входным дешифратором тактов ре0 гистра 32 признаков, результат сравнения ., , записывается в регист 32 признаков по сигналу CWR. Аналогично в зависимости от номера такта X коммутатор 34 признаков подключает
5 к адресному входу ПЗУ 35 тактов со- ответствующую часть признаков с выхода регистра 3 пр изнаков. ПЗУ 35 тактов формирует номер следующего такта X, который по сигналу CWR записываетВ первьй порт ОЗУ 31 записываются следующие реквизиты:
ТКС - номер текущей строки; 35 К кт - координата контрольной точки;
Н
- координата начала объекта
предшествующей строки;
К - координата конца объекта предшествующей строки;
КО - количество объектов в текущей строке;
ККТ - количество контрольных точек ПП конкретного типа;
НСВЯ(КСВЦТ) - номер связи объекта предшествующей строки или номер связи контрольной точки.
Во второй порт ОЗУ 31 записываются следующие реквизиты:
КС - количество строк растра;
СКТ - номер строки контрольной точки;
Нт - координата начала объекта текущей строки;
К т координата конца объекта предшествующей строки;
ЫПРТ(НИР кт) - номер проводника объекта текущей строки или номер проводника контрольной точки;
NTIPp - номер проводника объекта предшествующей строки.
В регистре 32 признаков формируются следующие признаки:
ТКС КС - номер текущей строки равен количеству строк растра (для определения окончания сканирования стороны ПП);
ТКС СКТ - номер текущей строки равен номеру строки контрольной точки (для определения перехода к выборке координаты контрольной точки К1)т) ;
К „т Н т; К кт 7 К т - координата контрольной точки меньше координаты начала или больше координаты конца объекта текущей строки (для определения непопадания контрольной точки на объект текущей строки);
Нп 7 Кт; Кп НТ; Кл Кт- координата начала объекта предшествующей строки больше координаты конца объекта текущей строки, координата конца объекта предшествующей строки меньше координаты начала или меньше координаты конца объекта текущей строки (для определения связности объектов);
NCBn Ш1РТ, НСВП МТРт - номер связи объекта предшествующей строки больше или равен номеру проводника объекта текущей строки (для присвоения номера проводника при определении связности объектов);
NCB кт ЫПР kT - номер связи контрольной точки равен номеру проводника контрольной точки (для определения наименьшего номера проводника, на котором расположена контрольная точка);
Т 1 - координаты объекта текущей строки выбраны;
П 1 - координаты объекта предшествующей строки выбраны;
ПР 1 - номер проводника выбран;
СКТ 1 - номер строки контрольной точки выбран;
ПС 1 - номер проводника объекту текущей строки присвоен.
Многофункциональный счетчик 33 состоит из пяти портов:
порт 1 - счетчик объектов текущей строки (СчТ);
порт 2 - счетчик объектов предшествующей строки (СчП);
порт 3 - счетчик контрольных точек (СчКТ);
0
порт 4 - счетчик строк (СчС);
порт 5 - счетчик проводников (СчПР).
Информационный вход счетчиков под ключей к шине данных BD. Запись информации в счетчиках происходит по сигналам группы EWR и стробируется сигналом CWR,
Каждый счетчик имеет возможность выхода на шину адреса ВА по сигналам группы ЕА и на шину данных BD по сигналам группы ED, а также сдвига вперед или назад, что определяется 5 сигналом группы ЕС и стробируется сигналом CRD.
СчТ при перезаписи информации об объектах в строке растра из первого блока 4 памяти во второй блок 6 па- мяти считает с нарастающим итогом (вперед), а при анализе связности во время выборки объектов текущей строки считает в обратном направлении (назад).
СчП и СчКТ считают только назад, СчС и СчПР - только вперед.
0
5
5
0
При переходе на новую строку растра СчС увеличивает свое содержимое
0 на единицу. При этом массив объектов текущей строки (МОТ) становится (с точки зрения дальнейшей обработки) массивом объектов предшествующей строки (МОП), и зона памяти второго блока 6 памяти, ранее занятая МОП, готова к приему информации об объектах новой текущей строки растра из первого блока 4 памяти.
Работа блока 5 связности элементов печатного монтажа разрешается .сигналом ST. В зависимости от номера такта X, который дешифрируется входным дешифратором тактов генератора 36 синхросигналов, вырабатываются строб
5 записи CWR, строб чтения CRD; в такте, в котором происходит перезапись данных из первого блока 4 памяти во второй блок 6 памяти, вырабатывается v сигнал ANRA; а в такте, который определяет окончание алгоритма анализа связности контрольных точек, формируется сигнал SR. По сбросу сигнала ST с выхода блока 1 управления блок 5 возвращается в исходное состояние.
g После установки ПП другой стороной (при контроле двухсторонних ПП) и нажатии оператором кнопки 10 Пуск в блоке 1 управления работа блока 5 анализа связности повторяется.
0
Адресный вход ОЗУ 39 подключен к шине адреса ВА, а информационный вход - к шине дранных BD. Команда Запись/чтение (WR/RD) определяет операцию Запись/чтение для ОЗУ 39. При записи коммутатор 38 подключает к входу выборки ОЗУ 39 строб записи CWR, стробирующий запись информации с шины данных BD в ОЗУ 39, а при чте нии - строб чтения CRD, стробирующий выставление информации из ОЗУ 39 на шину данных ВВ.
Сигналы WR/RD, CWR, CRD, принадлежащие шине управления ВСО, форми- руются ЭВМ при вводе-выводе информации из устройства или блоком 5 при обработке информации, поступающей из ПП,
Блок 2 считывания информации рабо тает следующим образом.
ПП устанавливается на каретку 46. После нажатия кнопки I0 Пуск в блоке 1 управления каретка 46 с помощью механически связанного с ней привода 48 перемещается под преобразователем 43 светового потока. Сканер 41 обеспечивает развертку коллимированного светового пучка с выхода осветителя 40 в плоскости сканирования.
Фокусирующий объектив 42, установленный так, что его фокальная плоскость совпадает с плоскостью изображения на поверхности ПП, фокусирует световой пучок с выхода сканера 41 в плоскости изображения. Таким образом, с помощью сканера 41, фокусирующего объектива 42 и преобразователя 43 светового потока осуществляется формирование в плоскости изображения линии сканирования, состоящей из последовательных изображений кружка рассеяния в плоскости изображения. Угол развертки светового пучка сканером 41 выбирается таким, чтобы линия сканирования пересекала первый 49 и второй 50 фотодатчики. Промодулиро- ванньй изображением проводящего рисунка ПП световой поток преобразуется преобразователем 43 светового пу тока в диффузно рассеянный поток и измеряется фотоэлектронным умножителем 44. Аналоговый сигнал с выхода фотоэлектронного умножителя 44 преоб
разуется АЦП 45 в двоичный код, явля к первому информационному входу блока ющийся информационные выходом блокапреобразования координат, выход кото2 считывания информации.
Считывание информации со всей поверхнссти ПП осуществляется за счет
рого соединен с первым информационным входом первого блока памяти, о т т личающееся тем, что, с це
5 о
5
0
5
0
отклонения сканирующего пучка в пределах линии сканирования (по координате X) и за счет перемещения ПП, установленной на каретке 46, механически связанной с приводом 48 (координата Y). Положение сканируемого пучка на линии сканирования непрерывно определяется угловым интерферометром 51. Выходной сигнал интерферометра 5I является синусоидальным сигналом, один период которого соответствует повороту сканирующего зеркала сканера 41 на угол, определяемый конструктивными характеристиками сканера 41 и углового интерферометра 51.
Формирование синхроимпульсов, сопровождающих двоичный код данных, осуществляет формирователь 52 синхроимпульсов При пересечении световым пучком входного окна фотодатчиков 49 и 50 он формирует синхросигнал SI, длительность которого соответствует времени прохождения светового пучка по строке сканирования - отрезку линии сканирования,ограниченному фотодатчиками 49 и 50. Кроме того, формирователь 52 синхроимпульсов преобразует аналоговый сигнал с выхода углового, интерферометра 51 в цифровые синхроимпульсы Ml, определяющие положение световогЬ пучка гна строке сканирования. Выходы формирователя 52 синхроимпульсов являются синхронизирующими выходами блока 2 считывания информации.
По окончании сканирования всей стороны ПП каретка 46 осуществляет возврат в исходное положение до тех пор, пока на сработает датчик 47 ис- ходного положения.
Формула изобретения
Устройство для контроля печатных плат, содержащее блок считывания информации, блок преобразования координат, блок управления и первьй блок памяти, информационный выход которого является выходом устройства и соединен с двунаправленной шиной передачи информационных, адресных и управляющих сигналов устройства, первый выход блока считывания информации подключен
рого соединен с первым информационным входом первого блока памяти, о т т личающееся тем, что, с це21
лью повышения надежности и быстродействия, оно содержит блок анализа связности элементов печатного монтажа и второй блок памяти, первый выход блока управления соединен с входом синхронизации блока считывания информации, вход которого подключен к синхронизирующему входу блока преобразования координат, второй выход блока считывания информации подключен к первому управляющему входу блока управления, второй и третий выходы которого соединены соответственно с первым и вторым управляющими входа- ми первого блока памяти, третий уп
Qoptiupota- ние пер- Зинат
Перезапись
MOV
IV
ъ i
il
lg «J
Анализ связности
tteptdava даннш в ЭВН
2929
22
is равляющий вход которого подключен к выходу блока анализа связности элементов печатного монтажа, управляющий вход которого соединен с третьим вы- 5 ходом блока управления, управляющий вход блока преобразования координат подключен к выходу первого блока памяти, причем соответствующие входы и выходы блока управления, блока преобразования координат, блока анализа связности элементов печатного монтажа и второго блока памяти соединены с двунаправленной шиной передачи адресных, информационных и управляющих сигналов устройства.
10
(«Г-Н1 h
ifr К датчику
исходного положения подвижного стола fyoitat
Фм.З
С Выхода йяока, t
(BCO)CWR -тERA(BCO)
йпока з
м
At
«
U
U./M IKOI
СКЯ
At H
Hi
Я1
HM
rm en
j-M for
Фиг.5
1
cw Ь(И
.зя
x4M
Hafxta ffitWt
(
WR/НЪ
cwtt
CKS
Ј0 Ј/
ттят
О
1
ВЬ W
fttt.7
IV/ RD
CS
и
30
ОТ
п
М.код(Пр,От)
jf Выходу uiomi управления
| Шаккар П | |||
| М., Гупта X | |||
| М | |||
| - ТИИЭР, 1975, № 4 | |||
| Электроника, 1978, If 17, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Буль В | |||
| А | |||
| и др | |||
| Оптические методы контроля в производстве печатных плат | |||
| - Зарубежная радиоэлектроника | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
