Изобретение относится к области морской техники и может быть использовано для навигационного оборудования морских районов и обеспечения безопасности судовождения и определения координат в море надводных кораблей и судов, а также подводных объектов.
Навигационное оборудование морского района представляет собой систему специальных береговых и плавучих сооружений, конструкций и устройств, предназначенных для обеспечения безопасности кораблевождения (судовождения) и служит для определения координат кораблей и судов в море, их правильной ориентировки во время плавания в прибрежных и мелководных районах.
Средствами навигационного оборудования служат береговые и плавучие маяки, светящиеся и несветящиеся знаки, навигационные огни, плавучие предостерегающие знаки (буи и вехи), радио-, радиолокационные и гидроакустические маяки, наземные станции радионавигационных систем и другие средства (Военно-морской словарь / Гл. ред. В.Н. Чернавин. М: Воениздат, 1989. - 511 с. С. 265 [1]).
Наиболее сложным является обеспечение безопасности плавания и точной ориентировки подводных плавающих средств под водой, так как большая часть средств навигационного оборудования установлена на поверхности воды или на берегу. Поэтому для подводных плавающих средств находят применение гидроакустические маяки (ГАМ).
Известен донный ГАМ, устанавливаемый на морском дне на глубинах до 6000 м, способный обеспечить навигационными параметрами подводные плавающие средства практически во всех районах Мирового океана. Дальность действия такого маяка достигает 20-25 км. (И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе. 1980. 428 с. С. 292 [2]). Устройство донного ГАМ включает: акустическую антенну с цилиндрическим или стержневым пьезокерамическим преобразователем; дежурный канал маяка, состоящий из приемного усилителя и дешифратора; электронную аппаратуру маяка, размещаемую в прочном корпусе; глубоководный поплавок для подъема антенны над грунтом; источник питания в одном прочном корпусе с электронной аппаратурой, выполняющим функцию якоря; съемного кожуха, внутри которого размещена бухта кабеля с тросом, соединяющим антенну и прочный корпус; тормозного устройства в нижней части прочного корпуса в виде амортизирующего гофрированного цилиндра, необходимое для предохранения маяка от повреждений при ударе о скалистый грунт. Отделение поплавка с антенной от прочного корпуса и переход его в дежурный режим происходит после сбрасывания маяка в воду при достижении им определенной глубины (И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с. С. 302-304 [3]).
Известен гидроакустический буй-маяк (ГАБМ) с аппаратурой спутниковой связи «Гонец-Д1М» и навигации ГЛОНАСС, входящий в состав подводной системы навигации и связи «Позиционер», включающей пункт управления и связанные с ним автономные необитаемые подводные аппараты (АНПА) и указанный выше ГАБМ (Д. Литовкин, А. Рамм. В России создан подводный ГЛОНАСС. М.: Известия IZ, 08.12.2016, https//iz.ru/news/650211 [4]). АНПА патрулируют заданный морской район на глубинах до 8 км и ориентируются при этом по данным ГАБМ, заранее установленных на дне и имеющих сверхточные координаты. ГАБМ передают навигационную информацию плавательным средствам, находящимся не только в воде, но и на ее поверхности. ГАБМ, входящие в состав системы «Позиционер», бывают донные, плавающие и вмораживаемые в лед. Общее устройство ГАБМ включает аппаратную часть, радио- и гидроакустическую часть и систему электропитания, размещаемые в пластмассовом корпусе. В состав радио- и гидроакустической части ГАБМ входят ультракоротковолновая радиостанция, приемник ГЛОНАСС, комплект системы спутниковой связи «Гонец-Д1М» и аппаратура подводной связи с АНПА. Донный вариант ГАБМ оборудуется якорем, в дрейфующем варианте аппаратная часть размещается в защитном корпусе с поплавками и дополнительными элементами питания, а вмораживаемый ГАБМ имеет специальный высокопрочный термоконтейнер с высокой термоизоляцией. При работе с АНПА гидроакустический буй-маяк имеет следующие режимы: «запросный», когда по запросу АНПА буй передает ему по гидроакустическому каналу связи информацию, полученную по спутниковому каналу связи; «диалоговый», когда в режиме реального времени буй связывает пункт управления с АНПА, используя свой радиоканал УКВ-диапазона и обеспечивает контроль местонахождения АНПА и управление им; «автономный», при котором АНПА уточняет у буя по гидроакустическому каналу связи свои координаты и действует самостоятельно; «аварийный», служащий для передачи сигнала бедствия от АНПА.
Известны автономные гидроакустические маяки-ответчики (патент RU №2292057, 20.01.2007 [5]), а также навигационные системы, содержащие несколько донных гидроакустических маяков с различными частотами излучения (патент RU №2483326, 26.05.2013 [6]), и судовые устройства кодированного запроса.
Принцип их работы основан на измерении временных интервалов распространения гидроакустических сигналов от объекта навигации до маяка и обратно, их преобразовании в дистанцию при известной скорости звука в морской воде и вычислении координат места объекта навигации или поправки к их счислимым координатам.
Основным преимуществом гидроакустических систем является относительно большая дальность действия при сравнительно небольшом энергопотреблении.
К недостаткам относятся малый срок службы, определяемый автономным источником питания, величиной саморазряда и интенсивностью работы.
Известно, что для устранения этого недостатка путем многократного использования маяка в его конструкцию вводят механизм отделения плавучей части от якоря с последующим укомплектованием новыми или восстановленными аккумуляторами и новым якорным устройством (Бородин В.И., Смирнов Г.Е., Толстикова Н.А., Яковлев Г.В. Гидроакустические навигационные средства. - Л.: Судостроение, 1983, с. 70 [7]). Это решение сопряжено со значительными организационно-техническими и производственными трудностями: выходом в море специальных плавательных средств для вызова, обнаружения и подъема маяка; допустимыми гидрометеоусловиями - состоянием моря, отсутствием льда, уровнем оптической видимости и др., а в условиях полярной ночи и высокой степени сплоченности льда такая работа представляется практически невозможной. Тем не менее, такое предложение может быть рациональным для особо сложных и дорогостоящих маяков.
Серьезной проблемой эксплуатации автономных маяков-ответчиков является неопределенность текущего состояния оставшегося энергоресурса вследствие неконтролируемого объема работ - количества ответов, технологической неоднородности саморазряда аккумуляторов и отдельных элементов батареи и, как следствие, возможность неожиданной потери связи с маяком, то есть ненадежность или невозможность гарантийных оценок действительного срока службы.
Известны (патент RU №2125733, 28.05.1997 [8]) гидроакустические маяки-ответчики, в которых введены дополнительные источники ионизированных излучателей в экранированном защитном корпусе, а также накопитель электрической энергии для периодической подзарядки аккумулятора автономного маяка.
Следует отметить биологическую небезопасность используемых радиоизотопных термоэлектрических генераторов (РИТЭГ). Например, в настоящее время по всей арктической зоне, включая акватории СМП, идет утилизация оставшихся РИТЭГ (http://www.iaea.org/OurWorkyST/NE/NEFW/Technical-Areas/WTS/CEG/documents/26th-IAEA-CEG-PlenaryMeeting/Paris_RUS_PDF/4.1_RTG_Program_Paper_Rus.pdf).
Решения навигационных тактико-технических задач в значительной степени зависят от эффективности систем подводной (подледной) связи объекта навигации.
Известны системы (патент RU №2287450, 20.11.2006 [9]), основанные на том, что подводный объект «выбрасывает» на поверхность моря кабельный радиобуй. В арктических акваториях, в условиях ледовой обстановки, этот способ становится проблематичным или невозможным в зависимости от степени ледового покрытия поверхности моря. К тому же работа радиобуя легко обнаруживается.
Известны также способы связи, основанные на подвсплытии подводной лодки на малую, подповерхностную глубину, на которую проникают электромагнитные волны радиодиапазона. К недостаткам относится незащищенность подводной лодки от средств воздушного наблюдения и обнаружения, включая и спутниковые системы, а также технические трудности «освещения» локальной поверхности моря (http://www.Libma.ru/tehnicheskienauki/sovetskieatomnyelodki/p.21.php).
Известны и электромагнитные системы глобальной связи, основанные на крайне низких частотах (отечественная «Зевс» и американская «Sanguine», включая ее развитие - «Seafer», «AustereELF» и «ProjectEEF»). Но они характеризуются чрезвычайно высокими затратами на сооружение и эксплуатацию, не получили дальнейшего развития по экономическим соображениям, а их преимущества, живучесть и надежность, в настоящее время представляются не бесспорными.
Следует отметить очевидные недостатки приемных устройств в виде буксируемых кабель-антенн длиной в сотни метров: необходимость стабилизации кабеля по глубине, конструктивная сложность управления выпуском и подбором антенны, существенное ухудшение маневренных характеристик подводного объекта и так далее. Таким образом, «классические» электромагнитные каналы подводной связи характеризуются ограниченной дальностью действия и малой информационной емкостью, но в сравнении с гидроакустической, звукоподводной связью обладают более высокой скоростью распространения сигнала и скрытностью работы, не подвержены многочисленным гидрологическим помехам. В качестве подводного канала связи могут быть использованы волоконно-оптические линии связи.
Арктическая навигационная система должна учитывать и известные особенности: ненадежная работа некоторых технических средств навигации в арктических широтах, например гироскопических и магнитных компасов; ограниченные точность и покрытие спутниковых систем навигации, в частности GPS и ГЛОНАСС, при работе в арктических широтах, а также их подверженность средствам противодействия; повышенную сложность, например, Северного морского пути в навигационном отношении, многочисленными островами, проливами, малыми глубинами, неблагоприятными метеоусловиями - частыми и длительными туманами, ограниченными возможностями визуальной и астрономической обсервации, часто сложной ледовой обстановкой.
Установка гидроакустических маяков и буев-маяков в морских районах осуществляется, как правило, надводными кораблями или судами в течение некоторого времени и сопровождается выполнением определенного маневрирования, демонстрируя сторонним и нежелательным наблюдателям характер ведущихся в районе работ по его оборудованию некими стационарными системами, что является недостатком существующих гидроакустических маяков и способов оборудования ими морских районов. Другим недостатком гидроакустических маяков и буев-маяков является отсутствие у них такого качества, как мобильность, что не позволяет при необходимости оперативно оборудовать ими морские районы.
Мобильность гидроакустического маяка или буя-маяка и скрытность оборудования ими морского района может быть обеспечена с применением подводных плавательных средств. Наиболее подходящим транспортировщиком гидроакустического маяка или буя-маяка является автономный или дистанционно управляемый автономный необитаемый подводный аппарат (АНПА). Типовой АНПА имеет корпус обтекаемой цилиндрической или иной формы, средства движения и энергообеспечения, гидроакустические и телевизионные средства поиска, навигационное оборудование, средства связи, отсек для полезной нагрузки и приборы управления. Для связи с пунктом управления он оборудуется аппаратурой связи с гидроакустическим или радиотехническим каналом (Сиденко К.С. Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ. №2, 2008 [10]).
АНПА выполняют различные функции, в том числе, ведут подводные поисковые работы по обнаружению и идентификации морских мин, осуществляют гидроакустические, гидрографические и батиметрические измерения, а также обследуют подводные объекты и гидротехнические сооружения (И. Белоусов. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение, 2013, №5. С. 79-88 [11]. Однако в качестве средств доставки навигационного оборудования в морские районы они применения еще не нашли.
Известны способы, обеспечивающие позиционирование подводных объектов с помощью гидролокатора. Среди них: способ по патенту RU №2032187, 27.03.1995 [12], заключающийся в том, что на дне водоема размещается некоторое количество гидроакустических маяков-ответчиков с различными частотами ответа, создающих навигационную базу, и их калибровку в относительных и географических координатах с помощью судна обеспечения. Для этого судно обеспечения оснащается бортовыми комплексами спутниковой и гидроакустической навигации. Гидроакустический передатчик, располагаемый на объекте навигации, осуществляет излучение гидроакустических сигналов с последующим измерением временных интервалов их распространения от объекта навигации до донных маяков-ответчиков и обратно, и преобразования этих интервалов в дистанции между объектом навигации и размещенными на дне маяками-ответчиками донной навигационной базы. В результате обработки полученных значений дальности от объекта навигации (подводного объекта) до донных маяков-ответчиков получают достоверные результаты навигации, обеспечивающие его позиционирование.
Недостатками данного способа являются значительные затраты судового времени, что сказывается на низкой оперативности метода; большое количество донных маяков-ответчиков (12…16 шт.) с длительным сроком автономности и необходимостью их технического обслуживания; необходимость проведения калибровочных работ, причем не только при постановке и снятии донных маяков-ответчиков, но и в период их эксплуатации при изменении внешних условий, среди которых могут выступать гидрологические и сейсмические факторы; необходимость замены донных маяков-ответчиков после выработки своего энергетического ресурса с обязательным последующим проведением калибровочных работ вновь установленного донного оборудования; сложность бортовой аппаратуры объекта навигации, которая сказывается на ее стоимости.
Известен способ определения географических координат подводного объекта по патенту US №5579285, 21.08.1995 [13]. Способ реализован на базе устройства, в состав которого входят дрейфующие GIB-буи (Gtobal Intelligent Buoy), образующие длинную базу, составляющую километры, и подводный аппарат с маяком - гидроакустическим передатчиком, излучающим сигналы определенной частоты в предустановленные моменты времени. Каждый буй снабжен гидроакустическим приемником (гидрофоном), приемником глобальной системы позиционирования GPS, часами, синхронизированными с часами GPS, радиомодемом. Буи измеряют собственные географические координаты с помощью GPS. В фиксированные моменты времени маяк излучает гидроакустический сигнал, который через определенное время запаздывания, определяемое расстоянием, фиксируется каждым буем. Одновременно, в строгой синхронизации по времени, полученным значениям времен запаздывания приписываются текущие географические координаты буев на момент начала излучения сигнала маяком подводного аппарата. Все полученные данные по радиоканалу через радиомодем передаются на пост слежения, расположенный либо на корабле сопровождения, либо на берегу. На этом посту с учетом полученных данных с помощью специального программного обеспечения вычисляются географические координаты подводного аппарата.
Недостатками данного способа являются: возможность сноса буев за счет дрейфа из района контроля на расстояния, превышающие дальность гидроакустической связи; из-за многолучевости распространения гидроакустических посылок возможность неоднократного прихода на любой из буев одного и того же сигнала, излученного маяком подводного аппарата, что отчетливо проявляется на больших дальностях между подводным аппаратом и буями или на мелководье; поскольку разность времени прихода гидроакустического сигнала на любой из буев определяется по переднему фронту приходящего от гидроакустического передатчика сигнала, то при малом отношении «сигнал/помеха» с учетом значительного расстояния между буем и подводным аппаратом существует неоднозначность определения времени запаздывания из-за возможного поражения сигнала помехой.
Известен также способ определения координат (патент RU №2365939, 27.08.2009 [14]). Для реализации указанного способа используют дрейфующую на водной поверхности станцию, оснащенную аппаратурой для непрерывного приема сигналов спутниковых навигационных систем (GPS или ГЛОНАСС). Прием и обработка этих сигналов обеспечивает определение собственных координат дрейфующей станции с высокой точностью в любой момент времени. По сигналу запроса с подводного объекта или по определенной программе работы дрейфующей станции информация о ее географических координатах передается на подводный объект по гидроакустическому каналу в виде шумоподобного кодированного сигнала определенной формы.
Недостатками данного способа является недостаточная точность определения географических координат подводного объекта, вызванная: погрешностью определения координат, связанной с изменчивостью скорости сигнала в морской воде, которая существенно возрастает на мелководье, когда временные задержки между отдельными лучами уменьшаются, при этом сами лучи идентифицировать и выделить отдельно невозможно; возможностью искажения сигнала, передаваемого с дрейфующей станции на подводный объект, вследствие его поражения или ослабления при наличии таких факторов, как гидрология (отрицательная рефракция, слой скачка скорости звука) и реверберация.
Известны также способы определения географических координат подводного объекта (патент RU №2717578 С1, 24.03.2020 [15] и его аналоги патенты RU №2365939 С1, 27.08.2009 [16]. RU №2488842 С1, 27.07.2013 [17], RU №2626244 С1, 25.07.2017 [18], RU №2460043 С1. 27.08.2012 [19], RU №2563332 С2, 20.09.2015 [20], US №4914598 А1, 03.04.1990 [21]). которые относится к области подводной навигации и обеспечивают позиционирование (географическую привязку) подводных объектов с определением их обсервованных географических координат с помощью гидролокатора и глобальной навигационной спутниковой системы.
Сущность данного способа заключается в том, что в способе определения географических координат подводного объекта при использовании гидролокатора, размещенного на надводном судне, основанном на приеме сигналов спутниковых навигационных систем GPS/ГЛОНАСС для определения собственных географических координат судна на выбранный момент времени, передаче по гидроакустическому каналу информации о собственных географических координатах судна на подводный объект, на котором с учетом его текущих географических координат, определяемых бортовой навигационной системой, осуществляется определение истинных географических координат  подводного объекта, при этом гидролокатором надводного судна на выбранный момент времени определяются три пространственные координаты подводного объекта - пеленг (П), дальность (Д) и угол места (УМ), значения которых подаются на бортовой компьютер надводного судна для расчета истинных географических координат подводного объекта с последующей передачей полученных значений, приведенных к выбранному моменту времени, по информационному кабелю в навигационную систему подводного объекта.
подводного объекта, при этом гидролокатором надводного судна на выбранный момент времени определяются три пространственные координаты подводного объекта - пеленг (П), дальность (Д) и угол места (УМ), значения которых подаются на бортовой компьютер надводного судна для расчета истинных географических координат подводного объекта с последующей передачей полученных значений, приведенных к выбранному моменту времени, по информационному кабелю в навигационную систему подводного объекта.
При этом способ заключается в предварительном расчете обсервованных географических координат  подводного объекта на борту надводного судна на выбранный момент времени и их передаче, приведенных к этому времени, в навигационную систему подводного объекта, ч то достигается с помощью: гидролокатора, размещенного на надводном судне и определяющего три пространственные координаты подводного объекта: пеленг (П), дистанцию (Д), угол места (УМ); навигационного GPS/ГЛОНАСС -приемника, размещенного на надводном судне и принимающего данные с искусственного спутника Земли о его истинных географических координатах (ϕист., λист.); кабеля связи, обеспечивающего информационный канал передачи данных подводному объекту с надводного судна и обратно. В качестве указанных данных выступают искомые обсервованные (точно рассчитанные) географические координаты подводного объекта (ϕо,
подводного объекта на борту надводного судна на выбранный момент времени и их передаче, приведенных к этому времени, в навигационную систему подводного объекта, ч то достигается с помощью: гидролокатора, размещенного на надводном судне и определяющего три пространственные координаты подводного объекта: пеленг (П), дистанцию (Д), угол места (УМ); навигационного GPS/ГЛОНАСС -приемника, размещенного на надводном судне и принимающего данные с искусственного спутника Земли о его истинных географических координатах (ϕист., λист.); кабеля связи, обеспечивающего информационный канал передачи данных подводному объекту с надводного судна и обратно. В качестве указанных данных выступают искомые обсервованные (точно рассчитанные) географические координаты подводного объекта (ϕо,  которые рассчитываются на надводном судне по определенным алгоритмам с учетом пространственных координат подводного объекта (П, Д, УМ) и истинных географических координат надводного судна
которые рассчитываются на надводном судне по определенным алгоритмам с учетом пространственных координат подводного объекта (П, Д, УМ) и истинных географических координат надводного судна 
Реализация данного способа реализуется посредством гидролокатора, размещенного в килевой части надводного судна, определяются три пространственные координаты подводного объекта: пеленг; дистанция; угол места. Это осуществляется в результате обработки отраженного от подводного объекта зондирующего гидроакустического сигнала, представляющего собой импульсы определенной амплитуды, длительности, скважности и частоты заполнения, которые излучаются гидролокатором надводного судна в сторону подводного объекта и после отражения от него принимаются и фиксируются двумя сканирующими в пространстве диаграммами направленности, формируемыми гидроакустической антенной указанного гидролокатора в режиме приема. Истинные географические координаты надводного судна  определяются по сигналам, поступающим от искусственного спутника Земли навигационной системы GPS/ГЛОНАСС, которые принимаются его навигационным приемником. С учетом этих координат и полученных пространственных координат (пеленг, дистанция, угол места) подводного объекта осуществляется точный расчет координат подводного объекта на надводном судне, выполняемый по определенным алгоритмам, после чего рассчитанные географические координаты
определяются по сигналам, поступающим от искусственного спутника Земли навигационной системы GPS/ГЛОНАСС, которые принимаются его навигационным приемником. С учетом этих координат и полученных пространственных координат (пеленг, дистанция, угол места) подводного объекта осуществляется точный расчет координат подводного объекта на надводном судне, выполняемый по определенным алгоритмам, после чего рассчитанные географические координаты  подводного объекта передаются в его навигационную систему по информационному кабелю с надводного судна.
подводного объекта передаются в его навигационную систему по информационному кабелю с надводного судна.
Способ может быть использован только при благоприятных погодных условий и практически не осуществим в условиях с ледовым покрытием ввиду того, что используют надводное судно и информационный кабель, связывающий надводное судно обеспечения с подводным объектом. Кроме того, в настоящее время остро встал вопрос изучения Арктики, освоение ресурсов, изучение дна. Особенно проблемно работы в части Арктических морей, круглогодично закрытых льдом. Лед даже летом достигает такой толщины и сплоченности, что выполнение географических работ или выполнение работ по позиционированию подводных объектов без ледокольного обеспечения невозможно. Например, использование многолучевых эхолотов или гидролокаторов на надводном носителе даже при ледокольном обеспечении имеет несколько проблем - это повышенный шум из-за трения льда о корпус и необходимость закрывать излучатели ледовой защитой (или использовать специальные защищенные излучатели), что приводит к значительному снижению полосы обзора и качества сигнала.
Техническим результатом также аналогичной известной группы изобретений является разработка самоходного гидроакустического буя-маяка и способа навигационного оборудования морского района с его применением, предназначенных для осуществления оперативного и скрытного навигационного оборудования морского района с целью повышения безопасности плавания в нем, улучшения качества работы и маневрирования своих плавательных средств за счет обеспечения их точными навигационными параметрами (патент RU №2710831 С1, 24.03.2020 [22] и его аналоги патенты RU №2599902 С1, 20.10.2016 [23], RU №2014109532 А, 20.09.2015 [24], US №5119341 А1, 02.06.1992 [25], US №5331602 A1, 19.07.1994 [26]).
В качестве прототипа выбрано, техническое решение, приведенное в источнике [22]. Наряду с достоинствами известного способа и устройства для его реализации к недостаткам могут быть отнесены следующие.
Наибольший вклад в погрешность измерения дистанции вносит средняя скорость распространения звука по трассе, при этом погрешность определения координат может достигать от 200 до 400 м при максимальной дальности от передатчика гидроакустической станции (буя). Кроме того, использование пеленгационных (азимутальных) способов определения координат объекта нецелесообразно, так как на значительных расстояниях из-за относительно больших погрешностей в измерении пеленга на борту подвижного морского объекта (ПМО), погрешности определения его координат могут превышать десятки километров.
Задачей предлагаемого технического решения является повышение достоверности определения координат подводных объектов.
Поставленная задача решается за счет того, что в самоходном гидроакустическом буе-маяке, имеющим источник тока, аппаратуру управления, антенну и приемник спутниковой системы навигации типа ГЛОНАСС, аппаратуру подводной связи, приема и излучения гидроакустических сигналов, приемный усилитель и дешифратор, электронную аппаратуру маяка, якорное устройство с якорем, якорным канатом и вьюшкой, выполненный на базе автономного необитаемого подводного аппарата, имеет бортовую систему управления с модулем навигации и эхолотом, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями, дополнительно он оснащается радиопередатчиком и антенной для подачи сигналов о своем местонахождении при всплытии на поверхность, а также запоминающим устройством для записи гидроакустических сигналов и шумов в районе постановки, вычислительным устройством и датчиками гидростатического и гидродинамического давления, служащими для расчета скорости дрейфа гидроакустического буя-маяка при его погружении для постановки на якорь, направления и величины горизонтального сноса буя-маяка относительно якоря вследствие течения, якорное устройство дополнительно оснащается управляемым от бортовой системы управления фиксатором вытравленного с вьюшки якорного каната, служащего для регулирования глубины буя-маяка и расстояния его от грунта, а также устройством отделения коренного конца якорного каната от крепления на вьюшке с целью освобождения буя-маяка от якоря и всплытия на поверхность воды, в отличие от прототипа [22] излучатели приема и излучения гидроакустических сигналов выполнены из пьезокерамических колец, высокоточные опорные генераторы установлены как на буе. маяке, так и на ПМО, на ПМО дополнительно установлен модуль корреляционной обработки сигналов, размещенный в приемном тракте, который включает модуль единого времени, модуль АЦП, рубидиевый стандарт частоты, аппаратно-программные средства корреляционной обработки и декодирования принятых сигналов, каждый буй имеет вытравленный на заданную глубину тросс-кабель, на конце которого расположен гидроакустический излучатель, а в способе навигационного оборудования морского района, при котором рассчитывают количество гидроакустических буев-маяков, необходимых для навигационного оборудования заданного морского района, и определяют точки их установки, готовят на базе гидроакустические буи-маяки к установке, проверяют их работоспособность и загружают на плавсредство, доставляют их в заданный морской район и в расчетных точках сбрасывают в воду, после приводнения переводят гидроакустические буи-маяки в рабочее положение, при этом у стационарных буев отделяют якорь, разматывают буйреп и устанавливают его на грунте, оставляя поплавок буя, так же как и дрейфующий буй, на поверхности воды, включают радиостанцию, приемник спутниковой системы навигации, комплект спутниковой связи и аппаратуру звукоподводной связи, получают от спутниковой системы навигации географические координаты каждого буя и по запросу надводных или подводных плавсредств передают их по радио или звукоподводной связи, используют самоходные гидроакустические буи-маяки, выполненные на базе автономных необитаемых подводных аппаратов, готовят их к пуску, вводят в бортовую систему управления маршрутное задание и выпускают с берегового, морского или воздушного носителя, осуществляют движение каждого самоходного гидроакустического буя-маяка по заданному маршруту на заданной глубине в заданную для него точку, в процессе своего развертывания в заданный район они используют звукоподводную связь, средства подводного наблюдения и действуют в группе согласованно, на участке перехода, а также в заданной точке всплывают на поверхность, получают от спутниковой системы навигации координаты, погружаются на заданное расстояние от дна и становятся на якорь, по показаниям датчиков гидростатического и гидродинамического давления, длины якорного каната и расстояния от грунта рассчитывают в вычислительном устройстве истинные географические координаты самоходного гидроакустического буя-маяка и переводят его в дежурный режим работы, записывают в запоминающее устройство получаемые гидроакустические сигналы и окружающие шумы, обеспечивают действующие в районе свои надводные или подводные плавсредства по их запросу навигационной информацией, по команде с пункта управления, транслируемой по звукоподводной связи прибывшим плавсредством или ретранслятором, сбрасываемым с летательного аппарата, освобождаются от якоря и всплывают на поверхность, включают радиопередатчик и подают установленный сигнал для обнаружения своими плавсредствами, подъема на борт и возвращения на базу, в отличие от прототипа принимают широкополосные псевдошумовые сигналы (фазоманипулированные сигналы, например, М-последовательности), при обнаружении которых гидроакустическим приемным каналом навигационной аппаратуры ПМО выполняется операция корреляционной свертки принятого сигнала с копией излученного, решение об обнаружении и начале измерения времени распространения навигационного сигнала между буем и ПМО принимается по максимальному значению импульсной характеристики, преодолевшему порог корреляционного шума, далее, на рассматриваемом интервале измеряется задержка этого максимума относительно зондирующего импульса опорного генератора приемной аппаратуры ПМО, для прецизионного определения расстояний между буем - маяком и ПМО используют высокоточные опорные генераторы как на буе - маяке, так и на ПМО, при формировании шкалы времени и псевдослучайной последовательности для модуляции несущей частоты гидроакустической аппаратуры буя - маяка, так и в приемном тракте аппаратуры ПМО, для демодуляции принятого сигнала используют одну и ту же информацию, формирующую сигнал в модуляторе передатчика буя - маяка, измеренные приемной аппаратурой ПМО дальности до буя подвергаются обработке методом рекуррентной калмановской фильтрации, вектор оцениваемых параметров включает три компоненты: поправки широты, долготы (отшествия) к счислимым координатам ПМО и систематическую поправку, обусловленную расхождением часов (генераторов) буя-маяка и ПМО, определение вектора скорости ПМО выполняется путем совместной обработки серии обсерваций, после приводнения буев определяют залегание подводного звукового канала (если он имеется), принимают решение по глубине использования носителя при выполнении работ, определяют скорость и направление поверхностного течения, первоначально выставляют первый буй - маяк, расположенный на схеме расстановки со стороны преобладающего течения, после этого ПМО начинает движение на глубине выполнения гидрографических работ к месту установки второго буя, во время движения второго буя-маяка принимают сигнал от первого буя-маяка и определяют скорость и направление сноса второго буя-маяка, выполняют запись трека движения на каждом буе-маяке и регистрируют, данные о скорости звука в воде на горизонте заглубления, каждый буй-маяк оборудован аппаратурой СНС, имеющую общую синхронизацию, на глубине излучателя устанавливается измеритель скорости звука в воде, синхронизированный с записью трека в буе-маяке, все буи-маяки работают на одной частоте излучения и сигналы разнесены по времени или каждый буй маяк работает на своей частоте, каждый буй-маяк передает в свое назначенное время навигационный сигнал и затем серию из двух кодированных посылок (две величины - доли минут широты и долготы своего местоположения, в приемном тракте бортовой аппаратуры ПМО эти сигналы декодируются, первый - навигационный сигнал используется для определения дальности от буя-маяка до ПМО, две последующие серии сигналов декодируются, полученными величинами изменяются предыдущие координаты каждого буя-маяка, для каждого буя-маяка строится модель «поведения» - дрейфа, при этом используют данные курса и скорости ПМО, получаемые от ИНС, при расчете учитывает перемещение ПМО за время между сигналами буев и учитывает это при вычислениях.
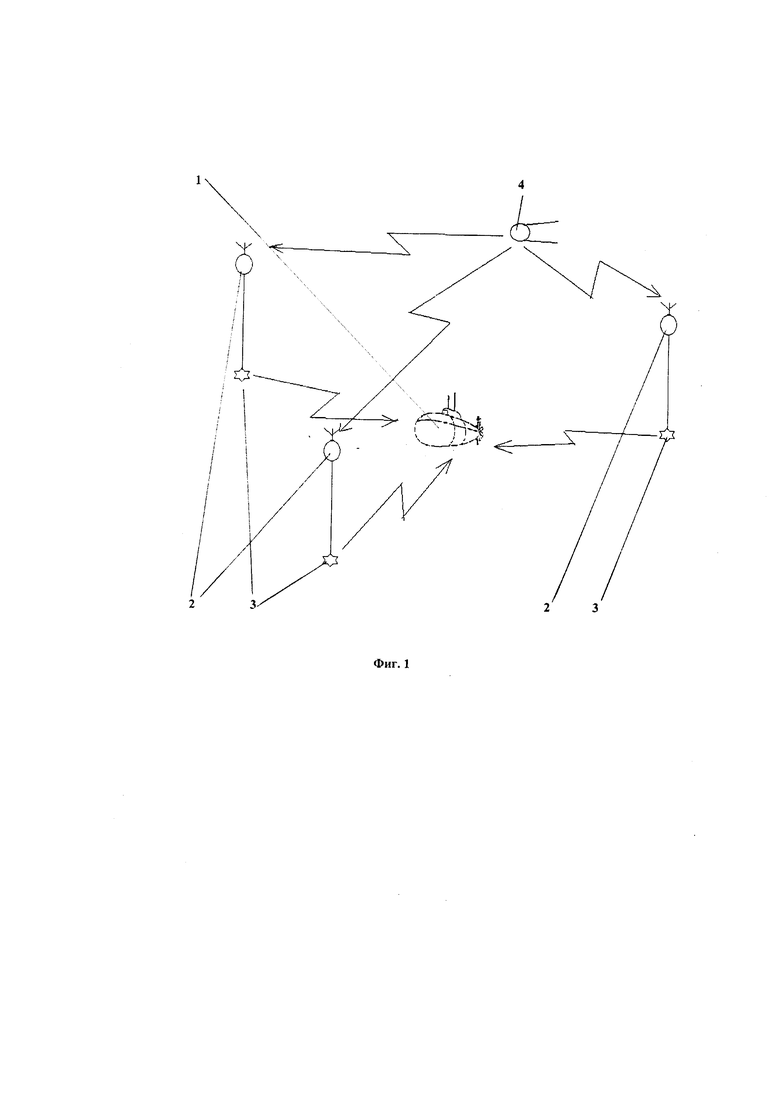
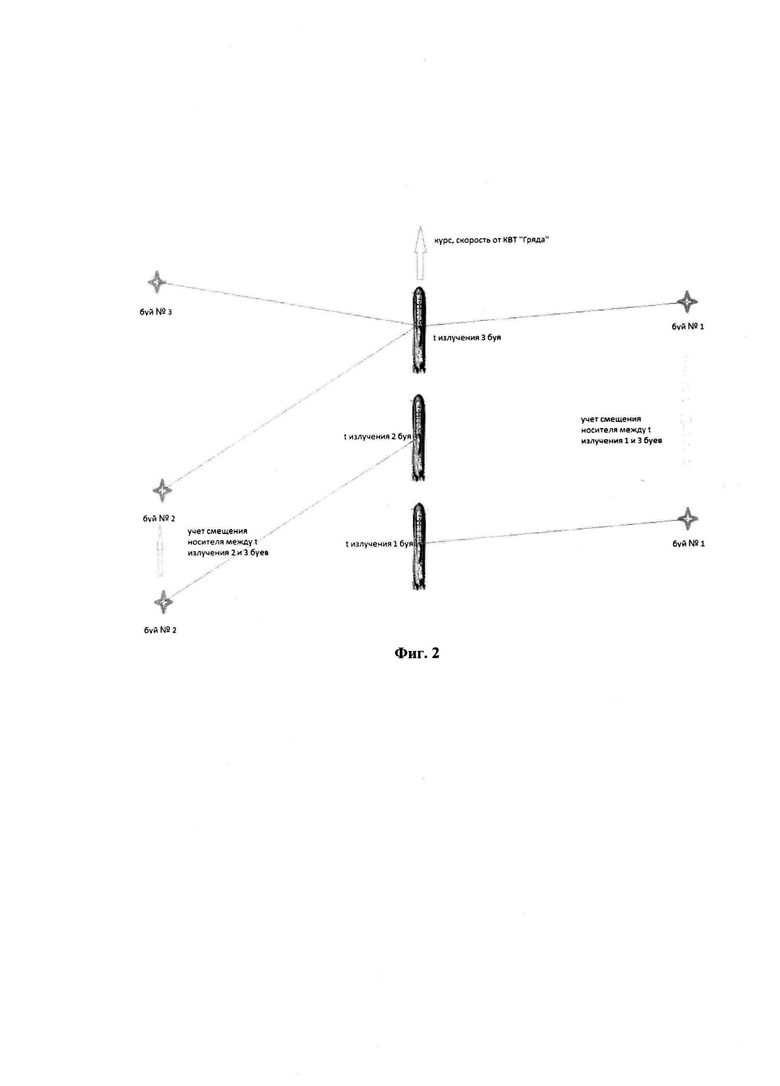
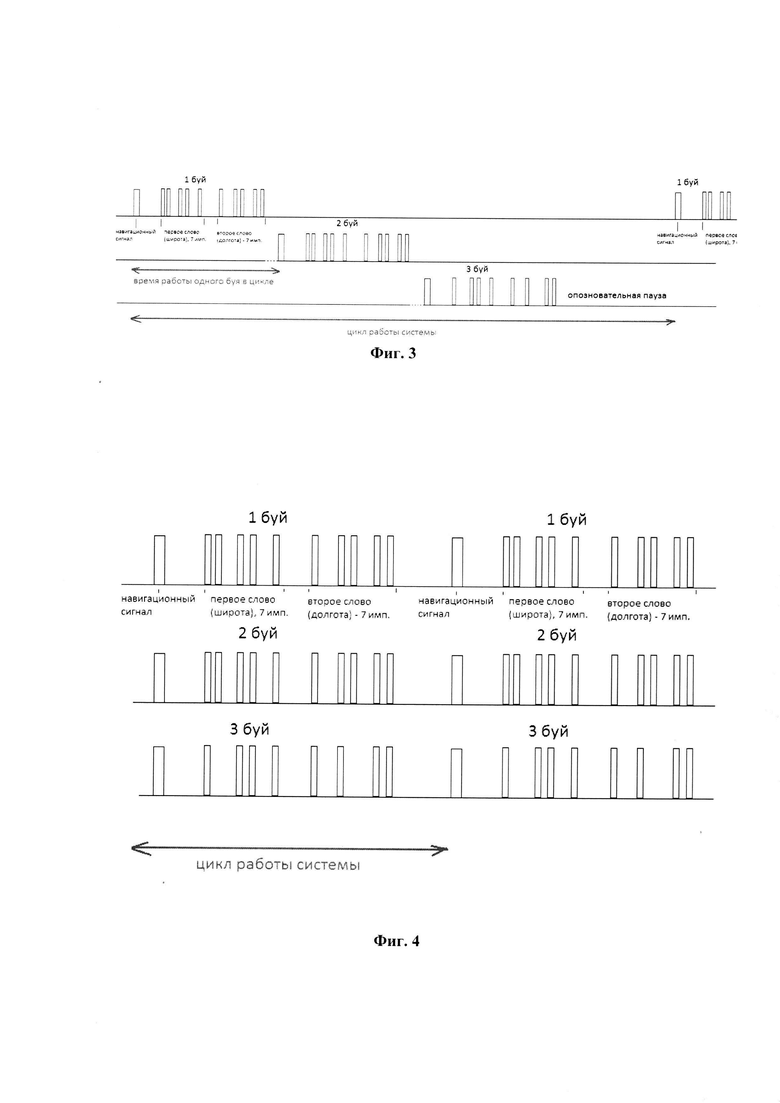
Сущность изобретения поясняется чертежами, где на фиг. 1-4 представлено: фиг. 1. Общая схема формирования навигационного полигона, где позициями обозначены: 1 - ПМО, 2 - буй-маяк, 3 - излучатель гидроакустических сигналов, 4 - навигационный спутник, фиг. 2 - схема расположения буев - маяков при учете смещения ПМО за промежуток времени t между сеансами излучения трех буев - маяков; фиг. 3 - цикл работы гидроакустической навигационной системы при варианте использования только одной частоты на трех буях - маяках; фиг. 4 - цикл работы гидроакустической навигационной системы при варианте использования разных частот на трех буях-маяках.
Конструктивно буй-маяк может быть выполнен, как и в прототипе, т.е. в виде автономного необитаемого подводного аппарата и содержат аналогичные конструктивные элементы.
Самоходный гидроакустический буй-маяк, как и в прототипе [22] работает следующим образом. При подготовке к пуску самоходного гидроакустического буя-маяка на носителе проверяют работоспособность его бортовых систем, вводят в бортовую систему управления маршрутное задание и программу работы в точке постановки, после чего по готовности выпускают его в воду. Далее самоходный гидроакустический буй-маяк прибывает в точку с заданными координатами и всплывает на поверхность для выхода на связь с космическими аппаратами спутниковой системы навигации и уточнения своих текущих координат. После определения своего местоположения самоходный гидроакустический буй-маяк погружается и, достигнув установленной глубины или отстояния от дна, отдает якорь и вытравливает заданную длину якорного каната. С занятием позиции гидроакустический буй-маяк переходит в дежурный режим работы, заключающийся в прослушивании окружающего пространства и записи в запоминающее устройство внешних шумов и готовности к приему запросного сигнала от обеспечиваемых плавсредств. С учетом показаний датчиков гидростатического и гидродинамического давления, длины вытравленного якорного каната и своего отстояния от грунта в вычислительном устройстве гидроакустического буя-маяка рассчитываются истинные географические координаты антенны, которые по установленному сигналу запроса передаются потребителям в виде зашифрованного сигнала вместе с массивом навигационной информации. При получении установленной команды по звукоподводной связи гидроакустический буй-маяк освобождается от якоря и всплывает на поверхность воды для подъема на борт судна, последующего возвращения на базу, технического обслуживания, расшифровки записей в запоминающем устройстве и переподготовки для дальнейшего использования. С целью облегчения поиска гидроакустического буя-маяка после всплытия на поверхность воды включается радиопередатчик и передает установленный сигнал на поисковое судно.
В отличие от прототипа в устройстве излучатели приема и излучения гидроакустических сигналов выполнены из пьезокерамических колец, высокоточные опорные генераторы установлены как на буе-маяке, так и на подводном или надводном объекте ПМО, координаты которого должны определяться, на ПМО дополнительно установлен модуль корреляционной обработки сигналов, размещенный в приемном тракте, который включает модуль единого времени, модуль АЦП, рубидиевый стандарт частоты, аппаратно-программные средства корреляционной обработки и декодирования принятых сигналов, каждый буй-маяк имеет вытравленный на заданную глубину тросс-кабель, на конце которого расположен гидроакустический излучатель. Буй-маяк может быть установлен и непосредственно с подводного ПМО. например, через торпедный аппарат.
В отличие от прототипа, в предлагаемом способе принимают широкополосные псевдошумовые сигналы (фазоманипулированные сигналы, например, М-последовательности), при обнаружении которых гидроакустическим приемным каналом навигационной аппаратуры ПМО выполняется операция корреляционной свертки принятого сигнала с копией излученного, решение об обнаружении и начале измерения времени распространения навигационного сигнала между пунктом излучения и ПМО принимается по максимальному значению импульсной характеристики, по сигналу, преодолевшему порог корреляционного шума. Далее, на рассматриваемом интервале измеряется задержка этого максимума относительно зондирующего импульса опорного генератора приемной аппаратуры ПМО, для прецизионного определения расстояний между буем-маяком и ПМО используют высокоточные опорные генераторы как на буе-маяке, так и на ПМО, при формировании шкалы времени и псевдослучайной последовательности для модуляции несущей частоты аппаратуры буя-маяка, так и в приемном тракте аппаратуры ПМО, для демодуляции принятого сигнала используют одну и ту же информацию, формирующую сигнал в модуляторе передатчика буя - маяка, измеренные приемной аппаратурой ПМО дальности до буя - маяка подвергаются обработке методом рекуррентной калмановской фильтрации, вектор оцениваемых параметров включает три компоненты: поправки широты, долготы (отшествия) к счислимым координатам ПМО и систематическую поправку, обусловленную расхождением часов (генераторов) буя - маяка и ПМО, определение вектора скорости ПМО выполняется путем совместной обработки серии обсерваций, после приводнения буев - маяков определяют залегание подводного звукового канала (если он имеется), принимают решение по глубине носителя при выполнении работ, определяют скорость и направление поверхностного течения, первоначально выставляют первый буй-маяк, расположенный на схеме расстановки со стороны преобладающего течения, после этого ПМО начинает движение на глубине выполнения гидрографических работ к месту установки второго буя-маяка, во время движения второго буя-маяка принимают сигнал от первого буя-маяка и определяют скорость и направление сноса второго буя-маяка, выполняют запись трека движения на каждом буе-маяке и регистрируют, данные о скорости звука в воде на горизонте заглубления излучателя гидроакустических сигналов, каждый буй-маяк оборудован аппаратурой СНС, имеющую общую синхронизацию, на глубине излучателя гидроакустических сигналов устанавливается измеритель скорости звука в воде, синхронизированный с записью трека в буе-маяке, все буи-маяки работают на одной частоте излучения и сигналы разнесены по времени или каждый буй-маяк работает на своей частоте, каждый буй-маяк передает в свое назначенное время навигационный сигнал и затем серию из двух кодированных посылок (две величины - доли минут широты и долготы своего местоположения, в приемном тракте бортовой аппаратуры ПМО эти сигналы декодируются, первый - навигационный сигнал используется для определения дальности от буя-маяка до ПМО, две последующие серии сигналов декодируются, полученными величинами изменяются предыдущие координаты каждого буя-маяка, для каждого буя-маяка в строится модель «поведения» - дрейфа, при этом используют данные курса и скорости ПМО, получаемые от ИНС, при расчете учитывают перемещение ПМО за время между сигналами буев-маяков и учитывают это при вычислениях.
Отличительные признаки предлагаемого технического решения позволяют повысить точности определения координат места и скорости ПМО посредством формирования гидроакустической навигационной системой большой дальности на основе самоходных буев-маяков, использующей сложные широкополосные зондирующие сигналы. Для повышения точности определения координат места и скорости ПМО необходимо знать скорость распространения гидроакустических сигналов по трассе от излучателя буя-маяка до приемника ПМО, использовать на борту приемника и передатчика опорные генераторы, корректируемые по данным глобальных навигационных спутниковых систем ГЛОНАСС/GPS, и применять экстремально-корреляционные методы обработки измеренной дальности. Анализ современных тенденций развития подводных технологий свидетельствует о значительном прогрессе в области создания перспективных робототехнических комплексов. При этом требования к функциональным возможностям ПМО и робототехнических комплексов различного назначения в последние годы смещаются в сторону увеличения дальности от систем управления и позиционирования. Проблематичным при этом становится использование классической схемы гидроакустической системы с длинной базой, основанной на установке в районе применения ПМО донных маяков. Одним из перспективных методов увеличения дальностей и повышения точности позиционирования ПМО при использовании гидроакустической навигационной сети (ГНС), является применение низкочастотных сложных широкополосных зондирующих сигналов. В последнее время в системах гидроакустической навигации и связи широкое распространение получили разработки, использующие фазоманипулированные сигналы (например, М-последовательности) [Касаткин Б.А., Матвиенко Ю.В., Злобина Н.В., Рылов Р.Н. Принципы построения гидроакустических навигационных систем дальнего радиуса действия // Proc. of Intern. Conf. SubSeaTech' 2007. June 25-28. - St. Petersburg,2007. Бурдинский И.Н., Матвиенко Ю.В., Миронов А.С., Рылов Р.Н. О применении сложных сигналов в гидроакустических системах навигации и управления подводными роботами. Институт проблем морских технологий ДВО РАН Владивосток // Подводные исследования и робототехника. - 2008. - No1. - С. 39-46]. Сформулируем три основных требования, выполнение которых может обеспечить повышение эффективности гидроакустических навигационных средств, использующих сложные сигналы: высокоточное определение скорости распространения гидроакустических сигналов за счет повышения помехоустойчивости и использования прямых акустических лучей в каналах связи: передающая гидроакустическая станция (буй-маяк) - ПМО; высокоточное определение времени прихода навигационных сигналов путем выбора оптимальных параметров М-последовательностей (частота, количество символов, количество периодов на символ) и привязки зондирующих импульсов к системе единого времени как на буе - маяке, так и в приемной аппаратуре ПМО; расширение возможностей систем управления, телеметрии и навигационной системы за счет работы с ансамблем ортогональных навигационных сигналов и периодической коррекции бортовых часов по сигналам единого времени. Передатчик, установленный на буе - маяке должен быть низкочастотным и иметь достаточную частотную полосу для качественной передачи сложных сигналов. Наиболее подходящими для этих целей оказываются излучатели на базе пьезокерамических колец (Безответных В.В., Буренин А.В., Моргунов Ю.Н., Половинка Ю.А. Экспериментальные исследования особенностей распространения импульсных сигналов из шельфа в глубокое море // Акустический журнал. - 2009. - Т.55. - No3. - С. 374-380. POSSIBLE WAYS ТО INCREASE). Основным методом обработки широкополосных псевдошумовых сигналов при их обнаружении гидроакустическим приемным каналом навигационной аппаратуры ПМО является операция корреляционной свертки принятого сигнала с копией излученного. Решение об обнаружении и начале измерения времени распространения навигационного сигнала между пунктом излучения и ПМО принимается по максимальному значению импульсной характеристики, преодолевшему порог корреляционного шума. Далее, на рассматриваемом интервале измеряется задержка этого максимума относительно зондирующего импульса опорного генератора приемной аппаратуры ПМО. Таким образом, для прецизионного определения расстояний между буем - маяком и ПМО необходимо иметь высокоточные опорные генераторы как на буе-маяке, так и на ПМО. Как при формировании шкалы времени и псевдослучайной последовательности для модуляции несущей частоты аппаратуры буя-маяка, так и в приемном тракте аппаратуры ПМО, для демодуляции принятого сигнала должна использоваться одна и та же информация, формирующая сигнал в модуляторе передатчика буя - маяка. Увеличение длительности псевдослучайной последовательности повышает помехоустойчивость системы в целом. Подобная схема уже используется в спутниковых навигационных системах ГЛОНАСС и GPS. Для формирования шкалы времени и псевдослучайной последовательности на спутниковых аппаратах используются цезиевые и рубидиевые опорные генераторы (ОГ) с долговременной относительной нестабильностью 10-11-10-12, а в корабельной приемной аппаратуре установлены кварцевые опорные генераторы с долговременной относительной нестабильностью 10-6-10-9. Последние разработки кварцевых ОГ имеют небольшие массогабаритные характеристики и незначительное энергопотребление. Так как скорость распространения звуковых колебаний в морской воде приблизительно равна 1500 м/с, то аналогичные ОГ могут быть использованы в аппаратуре передатчика гидроакустических сигналов буя-маяка и в приемном тракте аппаратуры ПМО. В результате применения ОГ потенциальная (инструментальная) погрешность измерения дистанции не будет превышать единиц метров. Время непрерывной работы ОГ, при котором он будет обеспечивать заданную точность измерений, превышает шесть месяцев. Проведенные экспериментальные исследования показали, что использование сложных широкополосных фазоманипулированных сигналов позволит определять координаты подводных подвижных объектов достаточно точно (сотые доли процента) на расстояниях более 300 км от передатчика, установленного в прибрежной шельфовой зоне. Однако при этом на место установки передающего устройства накладываются ограничения: наличие отрицательной рефракции скорости распространения звука в водной среде, что приводит к формированию придонного звукового канала на континентальном шельфе и переходу акустической энергии в подводный звуковой канал (ПЗК). Хорошие результаты по точности измерения расстояний обусловлены стабильностью скорости звука на оси ПЗК, т.е. измерение расстояния между корреспондирующими точками сводится к умножению значений скорости звука на оси ПЗК на значение времени распространения максимального импульса, прошедшего вблизи оси ПЗК. Многократная апробация этой технологии (Безответных В.В., Буренин А.В., Моргунов Ю.Н., Половинка Ю.А. Экспериментальные исследования особенностей распространения импульсных сигналов из шельфа в глубокое море // Акустический журнал. - 2009. - Т.55. - No3. - С. 374-380. POSSIBLE WAYS ТО INCREASE) показала хорошие результаты, но было отмечено, что для повышения точности измерений необходимо учитывать тот факт, что обычно скорость звука на шельфе отличается от скорости звука на оси ПЗК, и необходимо рассчитывать эффективную (среднюю) скорость с учетом вклада скорости звука на шельфе. Для этого нужно провести измерение скорости распространения звука (СРЗ) с АНПА и вместе установки излучателя на буе - маяке. Зная численные значения этих величин, можно вычислить среднее значение СРЗ по трассе по формуле:
Vcp=VшRш/(Rпзк+Rш)+VпзкRпзк/(Rпзк+Rш), где Rш - длина части трасы на шельфе, Rпзк - длина части трассы в глубоком море, Vш - средняя скорость звука на шельфе, Vпзк - средняя скорость звука в глубоком море.
Применение сложных сигналов позволяет создать многоканальную приемную аппаратуру ПМО на основе кодового или частотного разделения сигналов. Это открывает возможности учета частотного доплеровского сдвига для широкого диапазона скоростей ПМО и организации передачи информации. Для реализации вышеизложенных требований передающая аппаратура буя-маяка должна иметь следующую приемо-передающую аппаратуру: опорный генератор для формирования временной шкалы и модуляции передающей частоты буя-маяка; приемники сигналов спутниковых навигационных систем ГЛОНАСС и GPS для периодической коррекции временной шкалы; аппаратуру для передачи измеренных значений СРЗ на ПМО для вычисления средней СРЗ по трассе, что позволит повысить точность измерения дистанций буй-маяк - ПМО. Измеренные приемной аппаратурой ПМО дальности до буя-маяка могут быть обработаны методом наименьших квадратов или методом рекуррентной калмановской фильтрации, при этом количество замеров навигационных параметров должно быть не менее четырех. Вектор оцениваемых параметров должен включать три компоненты: поправки широты, долготы (отшествия) к счислимым координатам ПМО и систематическую поправку, обусловленную расхождением часов (генераторов) буя-маяка и ПМО. Для определения вектора скорости ПМО необходима совместная обработка серии обсерваций. Предварительные испытания показывают, что возможно обеспечить определение дистанции до АНПА с погрешностью несколько десятков метров (Безответных В.В., Буренин А.В., Моргунов Ю.Н., Половинка Ю.А. Экспериментальные исследования особенностей распространения импульсных сигналов из шельфа в глубокое море // Акустический журнал. - 2009. - Т.55. - No3. - С. 374-380. POSSIBLE WAYS ТО INCREASE).
Анализ результатов показывает, что наибольший вклад в погрешность измерения дистанции вносит знание СРЗ по трассе, при этом погрешность определения координат может достигать от 200 до 400 м при максимальной дальности от буя-маяка. В тоже время использование для создания рабочей зоны посредством нескольких буев-маяков гидроакустической навигационной системы, например, в составе ведущей и нескольких ведомых станций, как это реализовано в наземных радионавигационных системах (РНС), невозможно, так как в РНС электромагнитный сигнал непрерывный, а гидроакустический сигнал - импульсный. Кроме того, использование пеленгационных (азимутальных) способов определения координат объекта нецелесообразно, так как на значительных расстояниях из-за относительно больших погрешностей в измерении пеленга на борту ПМО, погрешности определения его координат могут превышать десятки километров. В настоящее время остро встал вопрос изучения Арктики, освоение ресурсов, изучение дна. Особенно проблемно работы в части Арктических морей, круглогодично закрытых льдом. Лед даже летом достигает такой толщины и сплоченности, что выполнение, например, гидрографических работ без ледокольного обеспечения невозможно. Например, использование МЛЭ или ЕБО на надводном носителе даже при ледокольном обеспечении имеет несколько проблем - это повышенный шум из-за трения льда о корпус и необходимость закрывать излучатели ледовой защитой (или использовать специальные защищенные излучатели), что приводит к значительному снижению полосы обзора и качества сигнала. При установке гидрографического оборудования на подводном носителе эти проблемы не возникают, качество выполненных работ значительно выше по причине отсутствия качки, малой шумности, трения льда о корпус. Но возникает проблема подводной навигации, так как использование имеемых на настоящее время навигационных систем не может обеспечить необходимую для гидрографических работ точность. Очевидно, что в подводном положении, тем более подо льдом единственно возможной является использование гидроакустических навигационных систем (ГНС). Имеемые в настоящее время ГНС независимо от принципа навигации имеют общие недостатки, источником которых является необходимость установки излучателей ГНС на дне. Кроме того при больших глубинах необходимо учитывать наклонную дальность, поправку за вертикальное расположение скорости звука.
Предлагаемая система представляет из себя набор от 2-х до нескольких буев-маяков (для оборудования одного района работ достаточно 3-х). Подводный носитель сам расставляет их, например, через торпедный аппарат.
Каждый буй-маяк оборудован приемником СНС, позволяющей постоянно знать их точное местоположение и для получения сигнала точного времени. Таким образом, все буи синхронизированы по времени и составляют навигационную систему, имеющую общую синхронизацию. Синхронизация по времени подводного носителя производится также по СНС при всплытии перед выполнением работ (например, в полынье при установке буев-маяков) и далее по системе единого времени ПМО, точность удержания времени может быть существенно ниже при использовании 3-х и более буев. При использовании ГЛОНАСС, для синхронизации шкалы времени на сети общего пользования (ССОП) единое точное время распространяется от государственного эталона единиц времени, частоты и национальной шкалы времени (ГЭВЧ) через подсистему хранения и передачи эталонных сигналов точного времени ГЛОНАСС к наземным приемникам сигналов ГЛОНАСС. Согласно рекомендациям ITU-R, технические средства ГНС должны обеспечивать погрешность шкалы времени не более ÷ 500 не. Все буи будут иметь привязку к единому времени, точность которого достигает 0,5 мкс (при использовании сети общего пользования, а при использовании специально режима - точность может быть увеличена).
Каждый буй-маяк имеет вытравленный на заданную глубину трос-кабель, на конце которого расположен гидроакустический излучатель. В случае наличия в районе подводного звукового сигнала используют глубину расположения подводного звукового канала, на этой же глубине используют и ПМО. При отсутствии подводного звукового канала акустические излучатели буев-маяков вытравливаются на глубину предполагаемую глубину работы ПМО в районе. Этим полностью устраняется кривизна трассы распространения сигнала и необходимость учета временного распространения скорости звука, учитывать необходимо только скорость звука на горизонте проведения работ. На глубине излучателя устанавливается измеритель скорости звука в воде типа SVP-70 с записью трека в буе-маяке. Возможно два варианта построения ГНС, когда все буи-маяки работают на одной частоте излучения и сигналы разнесены по времени и когда каждый буй-маяк работает на своей частоте.
При использовании первого варианта, системе задается период работы, равный времени работы одного буя-маяка, умноженному на количество используемых буев-маяков, плюс 1. Все буи-маяки работают поочередно, начиная с того, которому присвоен №1 и далее по номерам. Получаемый разрыв между сериями является средством опознания начала нового цикла работы всех буев-маяков системой приема на ПМО. Разрыв может и не делаться, так как время на всех буях-маяках, так и на борту ПМО синхронизировано и время работы каждого буя-маяка четко определено. Буи-маяки работают поочередно через промежуток времени, достаточный, чтобы сигналы не налагались на сигналы предыдущего буя-маяка. Так для дальности действия буя-маяка 20 км, например, этот промежуток будет равен 15 сек.
Бортовая аппарату на ПМО - только приемная, что повышает скрытность носителя, не требует сложной системы синхронизации, упрощает всю систему. Поскольку бортовая система синхронизирована с буями-маяками, различает порядок следования сигналов от буев-маяков по их порядковому номеру после паузы (или по заранее назначенному синхронизированному времени работы), легко определить местоположение ПМО относительно дрейфующих или заякоренных буев-маяков по времени прохождения сигналов от них, с учетом скорости распространения скорости звука. Так как известно точное время излучения каждого буя-маяка, точное время его приема, получаем время прохождения сигнала от буя-маяка до ПМО, делим на скорость звука на горизонте работы носителя и получаем расстояние до буя-маяка с известными на момент излучения координатами.
Каждый буй-маяк передает в свое назначенное время не только навигационный сигнал, но и затем серию из двух кодированных посылок. В эти посылки буя-маяка вкладывают две величины - доли минут широты и долготы своего местоположения. Полностью координаты передавать нет необходимости, когда буи - маяки всплывают на поверхность и дрейфуя меняют свое местоположение со скоростью не более 3 узлов. И необходимо учесть только их смещение за короткое время, прошедшее между предыдущей посылкой буя в серии. Ориентировочно, например: при времени между посылками буя 10 сек, за указанное время, буй-маяк продрейфует при скорости дрейфа 3 узла всего 15,4 метра, т.е. менее 0,1 каб. В «координатном выражении» эта величина составляет 0,0 Г. Т.е. необходимо, чтобы буй - маяк передавал только сотые и тысячные доли минут. То есть буй-маяк, определяя свои координаты по СНС должен «отбросить» из значений координат градусы, минуты и десятые доли минут и передать только две двузначные цифры. Для скрытности эти цифры перед передачей кодируются. В приемном тракте бортовой аппаратуры ПМО сигналы декодируются, первый - навигационный сигнал используется для определения дальности от буя до ПМО, две последующие серии сигналов декодируются, полученными величинами изменяются предыдущие координаты каждого буя-маяка. Для кодирования двух двузначных цифр - изменений широты и долготы требуется два двоичных слова по 7 знаков («0» или «1»), которые кодируются наличием или отсутствием сигнала в слове. Для каждого буя-маяка посредством программного обеспечения строится модель «поведения» - дрейфа, система «знает» направление и скорость дрейфа, вычисленные при определении предыдущих координат буя-маяка, что позволяет однозначно учесть приращение координат в необходимую сторону. Далее решается задача определения координат ПМО по трем дальностям до трех ориентиров с известными координатами.
При этом система, используя данные курса и скорости ПМО, получаемые от ИНС, при расчете учитывает перемещение ПМО за время между сигналами буев - маяков и учитывает это при вычислениях, например, по типу «Крюйс-расстояния», сравнивает расчетные координаты и полученные. При этом точность определения координат буев-маяков 5-7 метров, ошибка времени СНС ±0,5 мкс. (возможно увеличение точности при использовании «закрытого режима») - 0,5 м на километр дальности, точность определения скорости звука на горизонте выполнения работ: при использовании измерителя скорости распространения звука в морской воде SVP-70, установленного в излучателе буя - маяка в диапазоне измерений скорости от 1350 м/с до 1800 м/с составляет 0.01 м/с - 0,0067 метра на километр дальности, точность определения координат по трем расстояниям, с учетом угла между линиями положения. Так как ошибка в определении места судна по расстояниям зависят от 3-х факторов: неодновременности измерения расстояний, смещения линий положения и угла пересечения линий положения, то рассчитывают среднюю квадратическую ошибку места по формуле:
 , где Δn1, Δn2 - смещение линий положения, θ - угол пересечения линий положения.
, где Δn1, Δn2 - смещение линий положения, θ - угол пересечения линий положения.
При этом при расположении ПМО внутри района работ, когда буи - маяки находятся с разных сторон от носителя, можно уменьшить ошибку знания скорости звука в воде, ошибку времени между системой единого времени и СНС путем расчета «треугольника погрешности».
Из вышеприведенных оценок погрешностей влияющих на точность можно сделать вывод, что точность определения места будет в диапазоне 10-15 метров. В варианте работы, когда каждый буй-маяк работает на своей частоте, усложняется приемная бортовая аппаратура, так как требуется количество приемных трактов, равное количеству буев-маяков, но система работает с синхронной передачей всех буев-маяков и учет «Крюйс-эффекта» не требуется. Но при этом частота посылок буев-маяков в N+1 будет чаще.
Буи-маяки могут быть как многоразовые (необходимость сбора, зарядки, подготовки к следующему использованию), так и для обеспечения скрытности работ одноразовыми -дешевыми, самозатапливающимися после исчерпания батарей.
При достижении порогового значения разряда батарей, буй-маяк начинает передавать только свои полные координаты для поиска и заряда, также буй-маяк может передавать в закодированном сообщение остаток ресурса для обеспечения своевременного заряда или замены буя маяка.
При расстановке буев-маяков, ПМО приходит в район работ, определяет залегание поля звукового канала (если он имеется), принимается решение по глубине при выполнении работ. По возможности определяется поверхностное течение. Сначала выставляется первый буй-маяк, расположенный на схеме расстановки со стороны преобладающего течения. После этого ПМО начинает движение на глубине выполнения гидрографических работ к месту установки 2 буя-маяка (№2), во время движения он уже принимает сигнал от буя-маяка №1 и может оценить скорость и направление сноса буя-маяка, также определяется по сигналу работающего буя-маяка дальность устойчивой работы буя-маяка. Выставив 2 буй-маяк, ПМО двигается и выставляет третий буй-маяк. После этого при возможности подвсплытия ПМО выдвигает антенну СНС и синхронизирует время системы единого времени, определяет свои точные координаты. Далее следует в район, делает контрольные галсы, попутно определяя устойчивость и бесперебойность работы системы в целом. При необходимости, принимается решение по переустановки буев-маяков. Далее производится необходимый вид работ.
Для обеспечения надежности получения координат предусмотрена запись трека движения на самом буе-маяке с последующим, после съемке буя 0 маяка, его извлечении и перерасчете параметров галса ПМО. Что сведет вероятность ошибки определения места практически к минимальному значению.
При выполнении гидрографических работ (батиметрическая или гравиметрическая съемки) возможен вариант использования системы без передачи координат буев-маяков (в районах с незначительным течением), движение носителя соответствующей аппаратурой, например, ПМО по заранее запланированным галсам с координированием по данным КВТ «Гряда» с учетом избыточного перекрыша между галсами. В этом случае «чистовая прокладка» производится системой (Replay) только после выполнения работ и съемки буев-маяков, извлечения треков с буев-маяков. Таким образом, решается вопрос по точности координирования, но высока вероятность «пропусков». Если же при выполнении работ не требуется сплошного покрытия района, а производится съемка, например, профилей для определения профиля континентального шельфа для выделения границ континентального шельфа, этот вариант может быть вполне достаточным. Передача сигнала без координат значительно снизит необходимую емкость батарей, удлинит время работы. При большой частоте посылок возможна передача координат буев-маяков не в каждой посылке, а через установленное количество посылок. Координаты буев-маяков при этом между посылками для определения местоположения на галсе определяются в этом случае интерполяцией, а при «чистовой» прокладке - по треку, записанному в память буев-маяков, после окончания работ.
При работах с прямолинейными галсами - такой метод может быть основным - 1 посылка с координатами - но уже с разрядами минут, десятых, сотых, тысячных, далее 10-20 посылок только навигационных, которые в бортовой аппаратуре записываются, но не обрабатываются и используются только при обработке по трекам буев - маяков. Посылки с навигационными сигналами обрабатываются в ходе работ и служат для контроля и корректировки нахождения на галсе и соблюдения межгалсового расстояния (при выполнении сплошного покрытия).
При работах на малых глубинах, где к точности предъявляются повышенные требования, можно запрограммировать буи - маяки так, чтобы на все время галса (а его длина, а значит и время прохождения легко вычисляется) передавался только навигационный сигнал, а на циркуляции и на время захождения на галс (что тоже несложно вычислить (плюс небольшой запас времени) - навигационные сигналы с координатами. При этом, поскольку все засинхронизировано, можно в программном обеспечении установить отслеживание начала и конца каждого галса и ориентироваться по времени. В этом случае обработка данных производится после скачивания треков с буев-маяков. При установке на ПМО высокоточного оптического курсоуказателя возможна определение места по одному бую-маяку. Получаются две линии положения - одна - курс, вторая - дальность до буя-маяка с известными координатами.
Для повышения точности на буе-маяке в трек могут записываться данные скорости звука в воде на горизонте заглубления излучателя (там необходимо установить датчик скорости звука) и на ПМО в ходе работ, при обработке могут быть учтены локальные изменения, чтобы получить после выполнения работ полную картину распределения скорости звука в районе на горизонте выполнения работ.
При использовании предлагаемого технического решения имеют место такие преимущества как: буи-маяки могут находиться как в подводном положение, так и на поверхности, при этом они могут быть легко сняты, заряжены и перемещены в другой район, поскольку акустический сигнал движется только в одну сторону - от буев-маяков к ПМО, система значительно проще, нет необходимости учитывать прохождение сигнала на тракте прием-обработка- передача сигнала, возможность использования любого количества буев-маяков (в варианте единой частоты для всех буев-маяков) для длинных маршрутов, например, для гравиметрической съемки, высокая точность определения местоположения порядка 10-15 метров, отсутствие необходимости использования судна обеспечения, отсутствие необходимости оборудования района донными маяками-ответчиками, определения координат их расположения. При этом определение координат донных маяков ответчиков выставившим их судном сталкивается с большими проблемами из-за трудности учета влияния среды (наклонная дальность сложной формы, вертикальное распределение скорости звука в месте установки и т.д.).
Кроме того, дальность действия системы определяется только частотой, условиями распространения сигнала данной частоты (ослаблением), причем только в одну сторону, мощностью сигнала излучателя буя и чувствительностью приемного тракта бортовой аппаратуры. Возможность использовать в качестве бортовой аппаратуры гидроакустический комплекс ПМО при наличии цифрового выхода. В этом случае гидроакустическая система настраивается на прием частоты буя-маяка (частот буев-маяков), при фиксации сигнала - он подается на выход и передается в программный комплекс с установленной программой навигации, которая фиксирует точное время получения сигнала. Гидроакустическая система АНПА имеет высокую чувствительность, что может значительно повысить дальность действия системы, при увеличении дальности действия буя-маяка теряет актуальность дрейфа буя-маяка, так как он может быть использован на большей дальности, несмотря на дрейф из района первоначальной установки.
Единственный недостаток использования буев-маяков на поверхности - это дрейф буев-маяков, но в открытых частях океана он редко бывает выше 1 узла, может быть учтен в процессе работ, а при планировании большое объема работ в районе или протяженных галсов (например, при выполнении гравиметрических наблюдений), буи-маяки могут быть расставлены в любом количестве и дрейф и его направление их могут быть учтены при планировании направления галса. Кроме того, режим использования буев - маяков на поверхности является кратковременным и обусловлен в основном получением радиосигналов от СНС.
В предлагаемой системе определения координат подводных объектов используются единые сигналы, которые являются опорными навигационными и одновременно носителями командно-связной информации, включая информацию о текущих гидрологических условиях в районе развертывания элементов системы. Предлагаемое техническое решение соответствует следующим требованиям: дальность приема навигационных сигналов по гидроакустическому каналу - не менее 500 км; дальность действия системы по передаче командно-связной информации по гидроакустическому каналу - не менее 500 км; предельная радиальная погрешность (Р = 0,997) определения географических координат места (по трем источникам навигационных и связных сигналов) - не более 250 м.
При этом тракт формирования навигационных и связных сигналов включает: модуль единого времени, модуль опорного генератора, формирующего частоты для нормального функционирования гидроакустической системы, цифро-аналоговый преобразователь, рубидиевый стандарт частоты, программные средства подготовки сигнального фрейма. Тракт предназначен для воспроизведения заранее подготовленного сигнального фрейма (записанного на SD карту файла) в заданные моменты времени. Бортовая шкала времени тракта синхронизирована с сигналами всемирного времени, передаваемыми ГЛОНАСС/GPS спутниками.
Тракт формирования навигационных и связных сигналов соответствует следующим требованиям: точность синхронизации с бортовой шкалой времени ГЛОНАСС/GPS спутников - 10-6 сек; относительная температурная нестабильность задающего генератора не хуже - 10-10; точность формирования частоты дискретизации - 0,01 Гц; частота дискретизации воспроизведения файлов - 24 кГц; полоса частот воспроизведения - от 300 до 600 Гц1; максимальный уровень выходного сигнала - Up-p=3 В; разрядность выходного ЦАП - 12 бит; воспроизведение файлов в формате - 16-bit Motorola PCM; поддержка SDHC карт памяти с файловой системой FAT32.
Предложенный самоходный гидроакустический буй-маяк и способ навигационного оборудования морского района, обеспечивают оперативное и скрытное навигационное оборудование морского района с целью повышения безопасности плавания в нем плавательных средств, как надводных, так и подводных, улучшения качества их работы и маневрирования за счет снабжения точными навигационными параметрами, а также позволяет обеспечить проведение гидрографических работ в соответствии с предъявляемыми требованиями по точности и надежности.
Источники информации.
1. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 265.
2. И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе. 1980. 428 с. С. 292.
3. И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с. С. 302-304.
4. Д. Литовкин, А. Рамм. В России создан подводный ГЛОНАСС.М.: Известия IZ, 08.12.2016, https//iz.m/news/650211.
5. Патент RU №2292057, 20.01.2007.
6. Патент RU №2483326, 26.05.2013.
7. Бородин В.И., Смирнов Г.Е., Толстикова Н.А., Яковлев Г.В. Гидроакустические навигационные средства. - Л.: Судостроение, 1983, с. 70.
8. Патент RU №2125733, 28.05.1997.
9. Патент RU №2287450, 20.11.2006.
10. Сиденко К.С, Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008.
11. И. Белоусов. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение, 2013, №5. С. 79-88.
12. Патент RU №2032187, 27.03.1995.
13. Патент US №5579285, 21.08.1995.
14. Патент RU №2365939, 27.08.2009.
15. Патент RU №2717578 С1, 24.03.2020.
16. Патенты RU №2365939 С1, 27.08.2009.
17. Патент RU №2488842 С1, 27.07.2013.
18. Патент RU №2626244 С1, 25.07.2017.
19. Патент RU №2460043 С1, 27.08.2012.
20. Патент RU №2563332 С2, 20.09.2015.
21. Патент US №4914598 А1, 03.04.1990.
22. Патент RU №2710831 С1, 24.03.2020.
23. Патент RU №2599902 С1, 20.10.2016.
24. Патент RU №2014109532 А, 20.09.2015.
25. Патент US №5119341 А1, 02.06.1992.
26. Патент US №5331602 А1. 19.07.1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 2019 |
|
RU2717578C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| Способ установки морского полигона донных станций | 2023 |
|
RU2797702C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И КОНТРОЛЯ В НЕМ АКУСТИЧЕСКИХ ОБЪЕКТОВ | 2023 |
|
RU2806775C1 |
Группа изобретений относится к навигации морских районов. Самоходный гидроакустический буй-маяк содержит источник тока, аппаратуру управления, антенну и приемник спутниковой системы навигации типа ГЛОНАСС, аппаратуру подводной связи, приема и излучения гидроакустических сигналов, приемный усилитель и дешифратор, электронную аппаратуру маяка, якорное устройство с якорем, якорным канатом и вьюшкой, бортовую систему управления, радиопередатчик, запоминающее устройство, вычислительное устройство, датчики гидростатического и гидродинамического давления, фиксатор вытравленного с вьюшки якорного каната и устройство отделения коренного конца якорного каната от крепления на вьюшке. Также заявлен способ для навигационного обеспечения судовождения, при котором рассчитывают необходимое количество гидроакустических буев-маяков, определяют точки их установки, готовят на базе к установке, проверяют их работоспособность и загружают на плавсредство, доставляют их в заданный морской район и в расчетных точках сбрасывают в воду, после приводнения переводят гидроакустические буи-маяки в рабочее положение. Технический результат заключается в повышении достоверности определения координат подводных объектов. 2 н.п. ф-лы, 4 ил.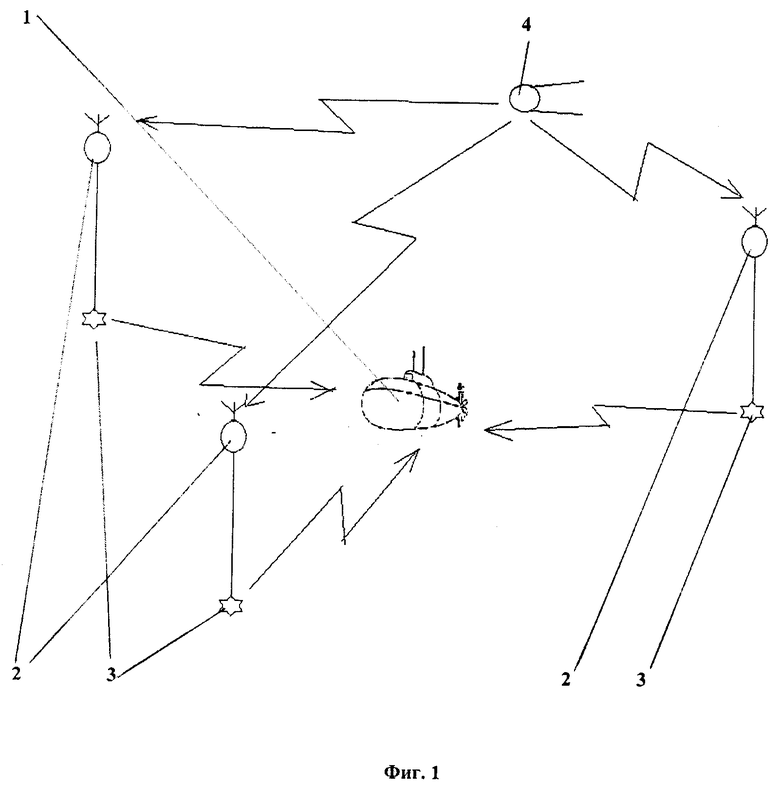
1. Самоходный гидроакустический буй-маяк, имеющий источник тока, аппаратуру управления, антенну и приемник спутниковой системы навигации типа ГЛОНАСС, аппаратуру подводной связи, приема и излучения гидроакустических сигналов, приемный усилитель и дешифратор, электронную аппаратуру маяка, якорное устройство с якорем, якорным канатом и вьюшкой, выполненный на базе автономного необитаемого подводного аппарата, имеет бортовую систему управления с модулем навигации и эхолотом, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями, дополнительно он оснащается радиопередатчиком и антенной для подачи сигналов о своем местонахождении при всплытии на поверхность, а также запоминающим устройством для записи гидроакустических сигналов и шумов в районе постановки, вычислительным устройством и датчиками гидростатического и гидродинамического давления, служащими для расчета скорости дрейфа гидроакустического буя-маяка при его погружении для постановки на якорь, направления и величины горизонтального сноса буя-маяка относительно якоря вследствие течения, якорное устройство дополнительно оснащается управляемым от бортовой системы управления фиксатором вытравленного с вьюшки якорного каната, служащего для регулирования глубины буя-маяка и расстояния его от грунта, а также устройством отделения коренного конца якорного каната от крепления на вьюшке с целью освобождения буя-маяка от якоря и всплытия на поверхность воды, отличающийся тем, что излучатели приема и излучения гидроакустических сигналов выполнены из пьезокерамических колец, высокоточные опорные генераторы установлены на самоходном гидроакустическом буе-маяке, буй-маяк имеет вытравленный на заданную глубину тросс-кабель, на конце которого расположен гидроакустический излучатель.
2. Способ для навигационного обеспечения судовождения, при котором рассчитывают количество гидроакустических буев-маяков, необходимых для навигационного оборудования заданного морского района, и определяют точки их установки, готовят на базе гидроакустические буи-маяки к установке, проверяют их работоспособность и загружают на плавсредство, доставляют их в заданный морской район и в расчетных точках сбрасывают в воду, после приводнения переводят гидроакустические буи-маяки в рабочее положение, включают радиостанцию, приемник спутниковой системы навигации, комплект спутниковой связи и аппаратуру звукоподводной связи, получают от спутниковой системы навигации географические координаты каждого буя и по запросу надводных или подводных плавсредств передают их по радио или звукоподводной связи, используют самоходные гидроакустические буи-маяки, выполненные на базе автономных необитаемых подводных аппаратов, готовят их к пуску, вводят в бортовую систему управления маршрутное задание и выпускают с берегового, морского или воздушного носителя, осуществляют движение каждого самоходного гидроакустического буя-маяка по заданному маршруту на заданной глубине в заданную для него точку, в процессе своего развертывания в заданный район они используют звукоподводную связь, средства подводного наблюдения и действуют в группе согласованно, на участке перехода, а также в заданной точке всплывают на поверхность, получают от спутниковой системы навигации координаты, погружаются на заданное расстояние от дна и становятся на якорь, по показаниям датчиков гидростатического и гидродинамического давления, длины якорного каната и расстояния от грунта рассчитывают в вычислительном устройстве истинные географические координаты самоходного гидроакустического буя-маяка и переводят его в дежурный режим работы, записывают в запоминающее устройство получаемые гидроакустические сигналы и окружающие шумы, обеспечивают действующие в районе свои надводные или подводные плавсредства по их запросу навигационной информацией, по команде с пункта управления, транслируемой по звукоподводной связи прибывшим плавсредством или ретранслятором, сбрасываемым с летательного аппарата, освобождаются от якоря и всплывают на поверхность, включают радиопередатчик и подают установленный сигнал для обнаружения своими плавсредствами, подъема на борт и возвращения на базу, отличающийся тем, что принимают широкополосные псевдошумовые сигналы, то есть фазоманипулированные сигналы, например, М-последовательности, при обнаружении которых гидроакустическим приемным каналом навигационной аппаратуры подвижного морского объекта (ПМО) выполняется операция корреляционной свертки принятого сигнала с копией излученного, решение об обнаружении и начале измерения времени распространения навигационного сигнала между пунктом излучения и ПМО принимается по максимальному значению импульсной характеристики, сигнала, преодолевшего порог корреляционного шума, далее, на рассматриваемом интервале измеряется задержка этого максимума относительно зондирующего импульса опорного генератора приемной аппаратуры ПМО, для прецизионного определения расстояний используют высокоточные опорные генераторы как на самоходном гидроакустическом буе-маяке, так и на ПМО, при формировании шкалы времени и псевдослучайной последовательности для модуляции несущей частоты аппаратуры на самоходном гидроакустическом буе-маяке, так и в приемном тракте аппаратуры ПМО, для демодуляции принятого сигнала используют одну и ту же информацию, формирующую сигнал в модуляторе передатчика самоходного гидроакустического буя-маяка, измеренные приемной аппаратурой ПМО дальности до самоходного гидроакустического буя-маяка подвергаются обработке методом рекуррентной калмановской фильтрации, вектор оцениваемых параметров включает три компонента: поправки широты, долготы к счислимым координатам ПМО и систематическую поправку, обусловленную расхождением часов самоходного гидроакустического буя-маяка и ПМО, определение вектора скорости ПМО выполняется путем совместной обработки серии обсерваций, после приводнения буев при наличии ПЗК определяют залегание ПЗК, принимают решение по глубине носителя при выполнении работ, определяют скорость и направление поверхностного течения, первоначально выставляют первый буй, расположенный на схеме расстановки со стороны преобладающего течения, после этого ПМО начинает движение на глубине выполнения гидрографических работ к месту установки второго буя, во время движения второго буя принимают сигнал от первою буя и определяют скорость и направление сноса второго буя, выполняют запись трека движения на каждом буе и регистрируют, данные о скорости звука в воле на горизонте заглубления, каждый буй оборудован аппаратурой СНС имеющую общую синхронизацию, на глубине излучателя устанавливается измеритель скорости звука в воде, синхронизированный с записью трека в буе, все буи работают на одной частоте излучения и сигналы разнесены по времени или каждый буй работает на своей частоте, каждый буй передает в свое назначенное время навигационный сигнал и затем серию из двух кодированных посылок в приемном тракте бортовой аппаратуры ПМО эти сигналы декодируются, первый - навигационный сигнал используется для определения дальности от буя до ПМО, две последующие серии сигналов декодируются, полученными величинами изменяются предыдущие координаты каждого буя, для каждого буя в ПМО строится модель «поведения» - дрейфа, при этом используют данные курса и скорости носителя, получаемые от ИНС при расчете учитывают перемещение ПМО за время между сигналами буев и учитывают это при вычислениях.
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599902C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2119172C1 |
| WO 2011084483 A2, 14.07.2011. | |||

