Фаз. 2
Изобретение относится к механизации трудоемких процессов в животноводстве, в частности к самозагружающимся кормораздатчикам.
Цель изобретения - повышение равно- мерности загрузки кормов
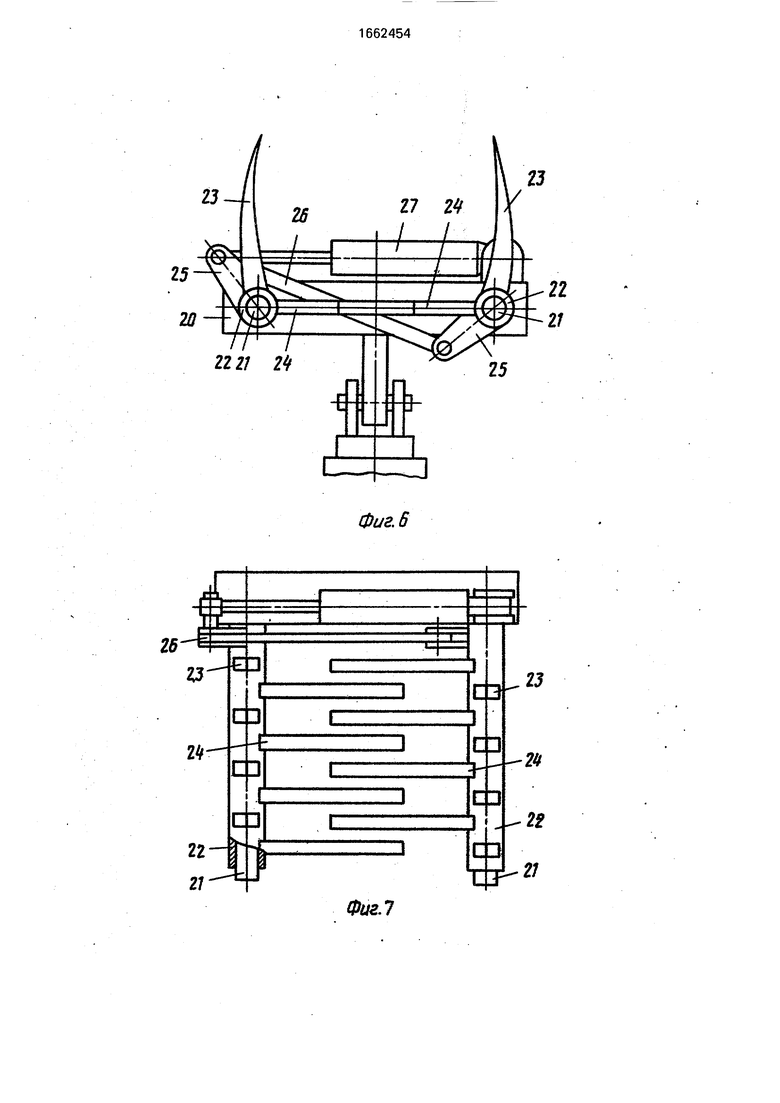
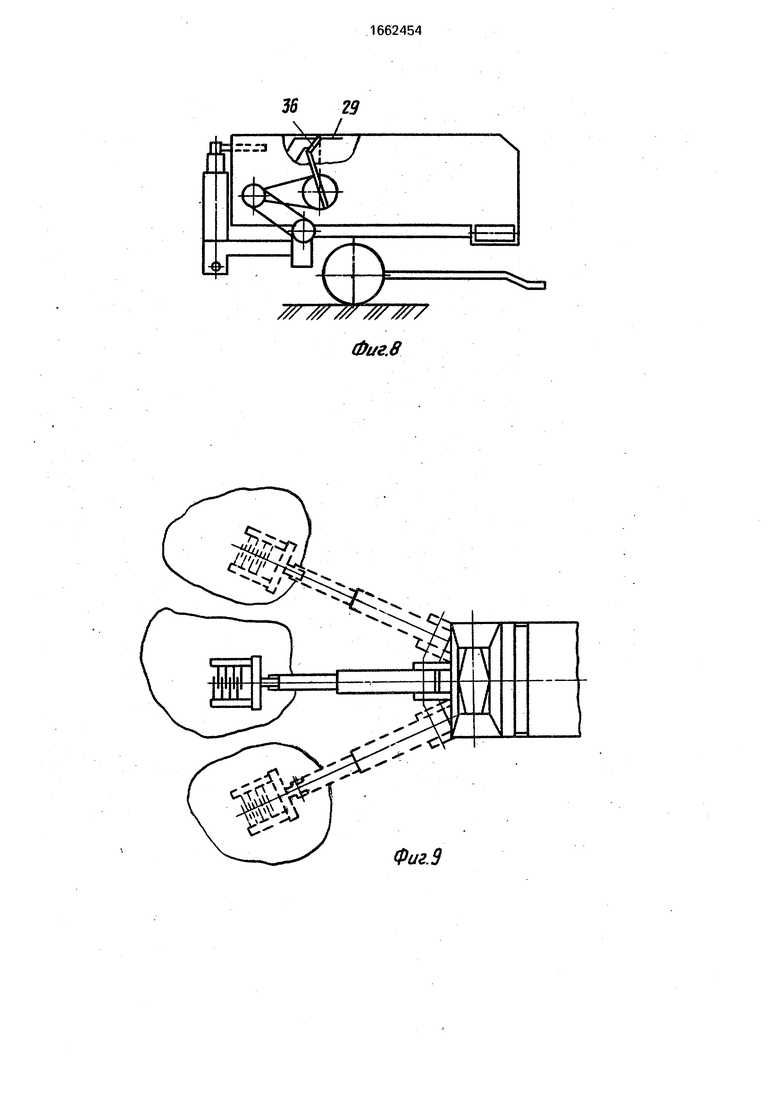
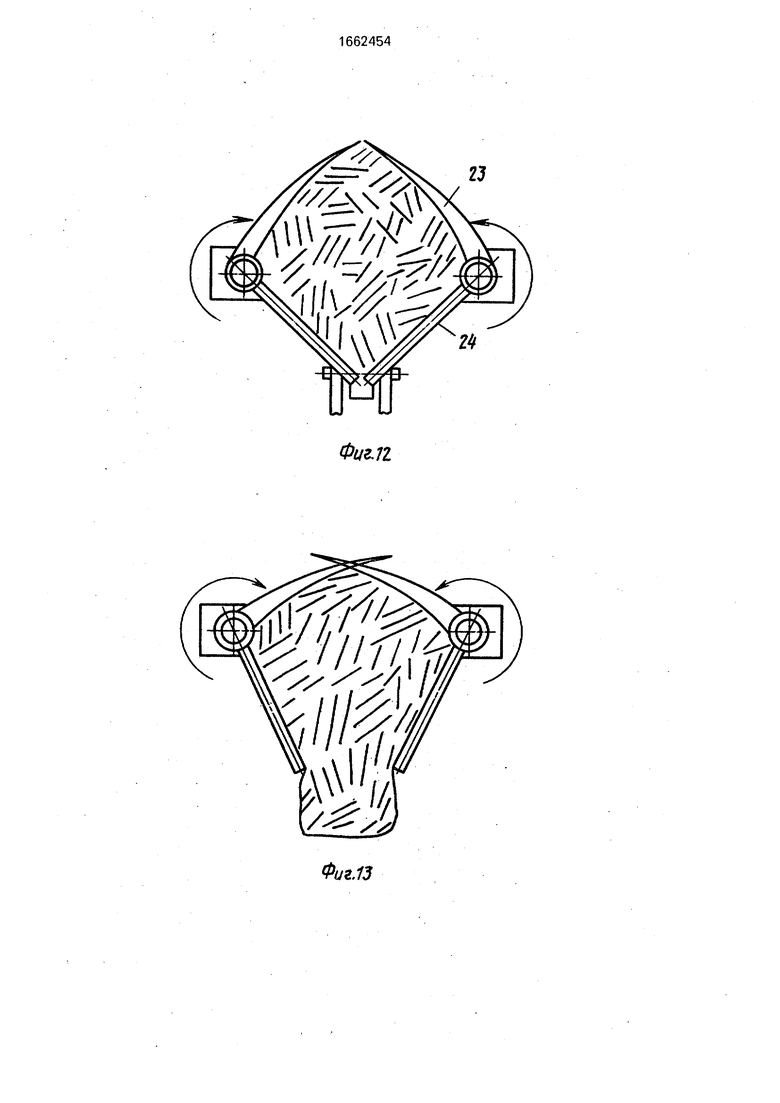
На фиг. 1 схематично изображен кормораздатчик, продольный разрез, в транспортном положении; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сзади; на фиг, 4 - то же, разрез А-А на фиг, 1; на фиг. 5 - то же, разрез Б-Б на фиг. 1; на фиг. 6 - грабельные решетки при захвате кормов, вид с торца; на фиг. 7 - то же, вид сверху; на фиг. 8 - механизм привода распределительной пластины, вид сбоку; на фиг. 9 - схема загрузки кормов, вид сверху; на фиг. 10 - то же., вид сбоку; на .фиг. 11 - схема размещения захватывающих зубьев и пальцев при уплотнении захваченной порции кормов; на фиг. 12 - то же, в начале выгрузки; на фиг. 13 - то же, при выгрузке; на фиг. 14 - то же, в конце выгрузки.
Самозагружающийся кормораздатчик содержит бункер 1, в нижней части которого установлены подающий транспортер 2 и поперечный выгрузной транспортер 3, а в передней части - отделяющие рабочие органы 4. На заднем борту внутри бункера смонтирован формирователь 5 кормовых слоев. Телескопическая стрела 6 с захватывающим органом 7 снабжена механизмом 8 поворота в горизонтальной плоскости.
Телескопическая стрела состоит из наружной квадратной трубки 9, внутренней квадратной трубы 10 и гидроцилиндра 11 выдвижения внутренней трубы. В нижней части телескопическая стрела пальцем 12 соединяется с механизмом поворота, который имеет жестко закрепленный на раме дугообразный сектор 13, подвижную платформу 14, один конец которой шарнирно установлен на основании 15, а другой опирается на ролики 16, свободно перемещающиеся в пазу дугообразного сектора. Поворот платформы относительно продольной оси кормораздатчика осуществляется гидроцилиндром 17. На платформе крепится корпус гидроцилиндра 18, шток которого связан с телескопической стрелой для ее поворота в вертикальной плоскости. Применение механизма 8 поворота позволяет осуществлять загрузку в бункер кормораздатчика кормов, находящихся в стороне от его продольной оси и за габаритами по его ширине. Так как стрела выполнена телескопической, то в процессе загрузки кормов можно изменять ее длину, что позволяет ускорять процесс погрузки в связи с изменением расстояния и высоты захвата кормов без дополнительного маневрирования кормораздатчика. В транспортном положении телескопической стрелы захватывающий орган 7 может быть утоплен в
пространстве над формирователем 5, в результате чего в этом случае габаритная высота кормораздатчика не увеличивается. Поворот захватывающего органа относительно конца внутренней трубы стрелы осу0 ществляется с помощью гидроцилиндра 19. Захватывающий орган имеет П-образную форму и достоит из горизонтальной несущей планки 20 в виде квадратной трубы, в которой своими концами жестко закреплеб ны полки 21, на которых шарнирно установлены трубчатые оси 22, на которых жестко закреплены захватывающие серповидные зубья 23 и паль цы 24. Зубья и пальцы расположены относительно друг друга под пря0 мыми углами. К осям 22 присоединены кронштейны 25, связанные между собой тягой 26. Поворот осей совместно с зубьями и пальцами осуществляется с помощью гидроцилиндра 27, корпус которого установлен
5 на планке 20, а его шток связан с кронштейном 25. Зубья обеих осей образуют грабельные решетки, обеспечивающие выгрузку кормов в бункер кормораздатчика при вертикальном положении телескопической
0 стрелы, при этом пальцы 24 образуют общую решетчатую плоскость для приема загружаемых кормов за счет выполнения их с длиной, превышающей половину расстояния между осями 22.
5 Формирователь 5 кормовых слоев выполнен в виде наклонного вдоль оси буккера кормопровода 28 с распределителем 29 и метателем 30, заключенным в корпус в нижней части бункера. Распределитель 29 в
0 виде пластины шарнирно установлен на верхнем конце кормопровода, представляющего собой неправильную усеченную четырехугольную пирамиду, меньшее основание которой прикреплено к выгруз5 ной горловине метателя. Ротор метателя выполнен в виде двух усеченных конусов, соединенных между собой большими основаниями 31. Большие основания 31 и меньшие основания 32 в виде дисков закреплены
0 на валу 33. На образующих конусов имеются оси 34, на которых шарнирно установлены лопатки 35 разной длины, описывающие своими свободными концами при вращении цилиндрическую поверхность. Привод ме5 тателя 8 осуществляется от ВОМ трактора. Поворот в вертикальной плоскости распределительной пластины производится с помощью кривошипно-шатунного механизма 36 привода, кинематически связанного с ротором метателя. Выгрузка кормов захватывающим органом 7 осуществляется в прием - ник 37, смонтированный над метателем.
Самозагружающийся кормораздатчик работает следующим образом.
Кормораздатчик задним ходом подается к хранилищу одного из компонентов кормовой смеси. Причем необязательно устанавливать кормораздатчик строго перпендикулярно к кормовому монолиту. С помощью ВОМ и гидросистемы трактора приводятся в действие формирователь 5 и телескопическая стрела 6. Путем выдвижения внутренней трубы 10 стрелы гидроцилиндром 11 захватывающий орган 7 поднимается из приемника 37. Гидроцилиндром 18 устанавливается необходимый угол наклона стрелы, а гидроцилиндром 17 она поворачивается в нужном направлении. Гидроцилиндром 27 серповидные зубья 23 и пальцы 24 переводятся в положение, обеспечивающее захват корма. При этом зубья 23 полностью открыты, а пальцы 24 полностью закрыты. С помощью гидроцилиндра 19 захватывающий орган поворачивается вокруг своей оси на угол 90-120°. После этого телескопическая стрела гидроцилиндром 18 начинает опускаться вниз. Под действием усилия, создаваемого гидроцилиндром 18, серповидные зубья начинают внедряться в кормовой монолит. Серповидная форма зубьев позволяет уменьшить сопротивление их внедрения в кормовой монолит. Когда зубья полностью войдут в кормовой монолит, включается в работу на втягивание штока гидроцилиндр 27. При этом зубья, расположенные на разных полках 21;движутся навстречу друг другу, уплотняют корма и перемещают их в сторону пальцев. Предварительное уплотнение кормов предотвращает их высыпание из захватывающего органа в процессе транспортировки в метатель. После уплотнения кормов телескопическая стрела гидроцилиндром 17 переводится в положение, совпадающее с продольной осью кормораздатчика, а гидроцилиндром 18 устанавливается вертикально. Затем включат ется в работу на втягивание штока гидроцилиндр 11 и на выдвижение штока гидроцилиндр 19. При этом захватывающий орган одновременно опускается вниз и поворачивается вокруг своей оси,в сторону приемника 37, при размещении над которым включается в работу на дальнейшее втягивание штока гидроцилиндр 27, в результате происходит синхронный поворот зубьев и пальцев. При этом зубья закрываются, а пальцы наоборот открываются, При полном закрытии зубьев и полном открытии пальцев происходит окончательная выгрузка кормов в приемник, через который корма поступают в метятсяь и, опускаясь вниз, захватываются лопатками 35. Под действием лопаток и создаваемого ими воздушного потока корма выбрасываются в пирамидальный кормопровод 28. При этом коническая форма ротора метателя и различная длина лопаток в ее центре и по концам обеспечивают равномерное распределение кормов
0 по всей ширине выходного большего основания кормопровода, соответствующего ширине бункера. Корма, выходящие из кормопровода, подвергаются воздействию постоянно поворачивающегося с помощью
5 кривошипно-шатунного механизма 36 привода распределителя 29, благодаря чему равномерно рапределяются по длине бункера. Синхронная работа метателя в распределителе обеспечивает равномерное
0 формирование слоев компонентов кормовой смеси необходимой толщины по всей ширине и длине бункера, что позволяет повысить качество смеси при выгрузке кормов в кормушки. Причем каждый раз, загрузив
5 первый компонент кормовой смеси в кормораздатчик, отключают метатель, распределитель, подачу масла в гидросистему телескопической стрелы и переводят кормораздатчик к месту хранения второго и т.д.
0 компонентов, где цикл загрузки происходит аналогично. После послойной загрузки в кузов всех компонентов кормовой смеси кормораздатчик транспортируется трактором к месту раздачи корма. От вала отбора мощ5 ности трактора приводятся в действие подающий транспортер 2, поперечный транспортер 3 и отделяющие рабочие орга- ны 4. Подающим транспортером слои компонентов перемещаются к отделяющим
0 рабочим органам, захватываются, перемешиваются и подаются ими на поперечный транспортер, который выгружает корма в кормушки.
При раздаче животным однокомпонент5 ного корма цикл загрузки, распределения и раздачи корма осуществляется в описанной выше последовательности. При этом формирователь 5 обеспечивает равномерное распределение однокомпонентного корма по
0 всей ширине, длине и высоте кузова.
При раздаче животным однокомпонент- ных кормовдлительное время или использо- вании кормораздатчика в качестве транспортного средства, например при пе5 ревозке соломы на подстилку животным, зе- леной массы для закладки силоса, формирователь 5 снимается с кормораздатчика. Телескопическая стрела осуществляет загрузку корма или зеленой массы на силос в заднюю часть кузова По мере заполнения
задней части кузова включается в работу подающий транспортер, чтобы переместить эти корма к отделяющим рабочим органам. Процесс загрузки продолжается до тех пор, пока не заполнится весь объем бункера по- сле загрузки кормораздатчик транспортируется к месту раздачи корма или выгрузки зеленой массы. Если кормораздатчик используется для раздачи кормов, то в месте раздачи включаются в работу подающий и поперечный транспортеры, отделяющие рабочие органьци осуществляется раздача животным.«
При использовании кормораздатчика в качестве транспортного средства процесс выгрузки происходит следующим образом. У места выгрузки телескопическая стрела опускается в горизонтальное положение в крайнее правое или левое положение, открывается задний борт, подающий транспортер включается на обратный ход. Зеленая масса (солома) выгружается из кормораздатчика через окно, образовавшееся при открытии заднего борта.
Благодаря такому выполнению самозаг- ружающйся кормораздатчик обладает более, широкими технологическими возможностями, такекак в одной машине осуществляются операции загрузки, равномерного формирования слоев компонентов смеси необходимой толщины, смешивания и раздачи кормовой смеси или однокомпо- нентных кормов.
Формула изобретения
1. Самозагружающийся кормораздатчик, содержащий смонтированный на ходовой части бункер с выгрузными рабочими органами и закрепленной на его раме телескопической стрелой, на свободном конце которой установлена основная грабельная решетка с поворотными на оси посредством гидроцилиндра захватывающими зубьями
серповидной формы, отличающийся тем, что, с целью повышения равномерности загрузки кормов, он снабжен формирователем кормовых слоев в бункере,
выполненным в виде наклонно размещенного в задней части последнего вдоль него с расширением кверху кормопровода, нижняя приемная часть которого расположена у задней части бункера и к ней подсоединен
метатель с горизонтальным ротором, который выполнен в виде соединенных между собой большими основаниями и усеченных ко нусов, перпендикулярно к поверхностям ко- торых прикреплены шарнирные лопатки,
свободные концы которых расположены на образующей описываемой ими цилиндрической поверхности, при этом верхняя часть кормопровода выполнена с распределительной пластиной, имеющей механизм
привода для ее поворота в вертикальной плоскости.
2.Кормораздатчик по п.1, о т л и ч а ю- щ и и с я тем, что телескопическая стрела снабжена закрепленной на ее свободном
конце дополнительной грабельной решеткой с выполненными идентично зубьям основной решетки захватывающими зубьями, причем оси захватывающих зубьев основной и дополнительной решеток установлены параллельно с возможностью синхронного поворота в противоположные стороны и выполнены с перпендикулярно прикрепленной к их концам несущей планкой и с жестко присоединенными к ним под
прямыми углами пальцами, имеющими длину, превышающую половину расстояния между осями основной и дополнительной решеток.
3.Кормораздатчик поп.1,отличаю- щ и и с я тем, что механизм привода кинематически связан с ротором метателя и выполнен кривошипно-шатунным.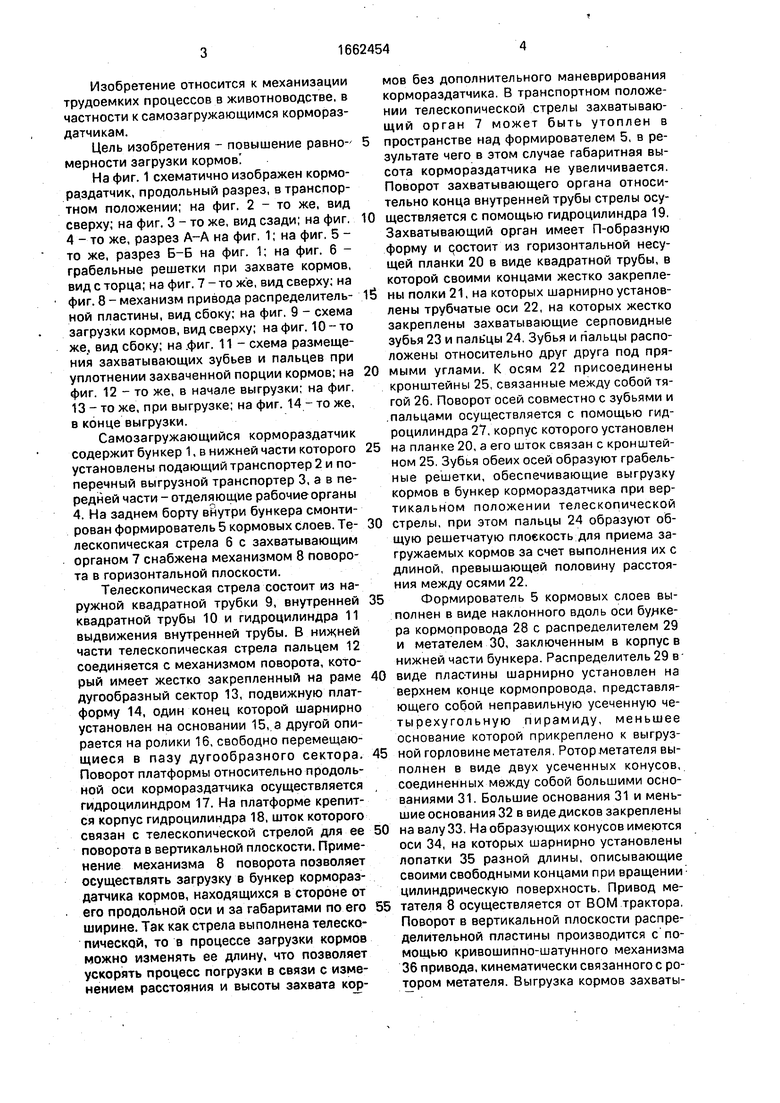


| название | год | авторы | номер документа |
|---|---|---|---|
| Самозагружающийся кормораздатчик | 1989 |
|
SU1762824A1 |
| Самозагружающийся кормораздатчик | 2016 |
|
RU2624954C1 |
| САМОЗАГРУЖАЮЩИЙСЯ КОРМОРАЗДАТЧИК | 2003 |
|
RU2286054C2 |
| САМОЗАГРУЖАЮЩИЙСЯ КОРМОРАЗДАТЧИК | 2002 |
|
RU2229799C1 |
| Самозагружающийся кормораздатчик | 1985 |
|
SU1353370A1 |
| Кормораздатчик для дозированного кормления сельскохозяйственной птицы | 1989 |
|
SU1618360A1 |
| Машина для разбрасывания материала | 1990 |
|
SU1771556A1 |
| Кормораздатчик | 1983 |
|
SU1101210A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗДАЧИ КОРМА | 1991 |
|
RU2048083C1 |
| КОРМОРАЗДАТЧИК | 2000 |
|
RU2178639C1 |




Изобретение относится к механизации трудоемких процессов в животноводстве и обеспечивает повышение равномерности загрузки кормов. Кормораздатчик содержит бункер 1 с выгрузными рабочими органами и телескопической стрелой, на которой шарнирно закреплен захватывающий орган 7, выгружающий порцию кормов в метатель 30. Захватывающий орган выполнен в виде двух закрепленных на синхронно поворачиваемых осях грабельных решеток из серповидных зубьев под прямыми углами, к которым к осям присоединены пальцы 24, поддерживающие порцию кормов при ее переносе от монолита к приемнику 37 метателя. При разгрузке порции кормов пальцы 24 открываются при одновременном закрывании зубьев решеток. Равномерное распределение кормов в бункере достигается выполнением ротора метателя из соединенных большими основаниями двух усеченных конусов и перпендикулярно прикрепленных к ним разновеликих лопаток, свободные концы которых при вращении описывают цилиндрическую поверхность, и соединением метателя с нижней частью расширяющегося кверху наклонного кормопровода 28, на выходе из которого в верхней части установлена поворотная распределительная заслонка 29. Последняя кинематически связана с ротором метателя. 2 з.п.ф-лы, 14 ил.
1 8Пф /ЛУ ////%//// /////////
WbZQQl
35 3
31 Б-Б 30 34 35
/ /
17
фигЛ
зг
20
22 21
26
#
--ED
М22 21
Фиг.7
21
Фиг. 6
23
24
It 21
8 гпф
/////// /s/ //////
i 9frZ99l
: v I гЛ lyjll l(v
/////////////////////// ///V/////
Фиг.11
Фиг.Ю
|
csi
з1Я
т см
СО
to
$
tw
€
| Устройство для измерения сцепления колес с рельсами | 1985 |
|
SU1245920A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
