Изобретение относится к машиностроению и может быть использовано для перемещения, например, руки манипулятора.
Целью изобретения является снижение энергозатрат и повышение КПД за счет рекуперации электроэнергии
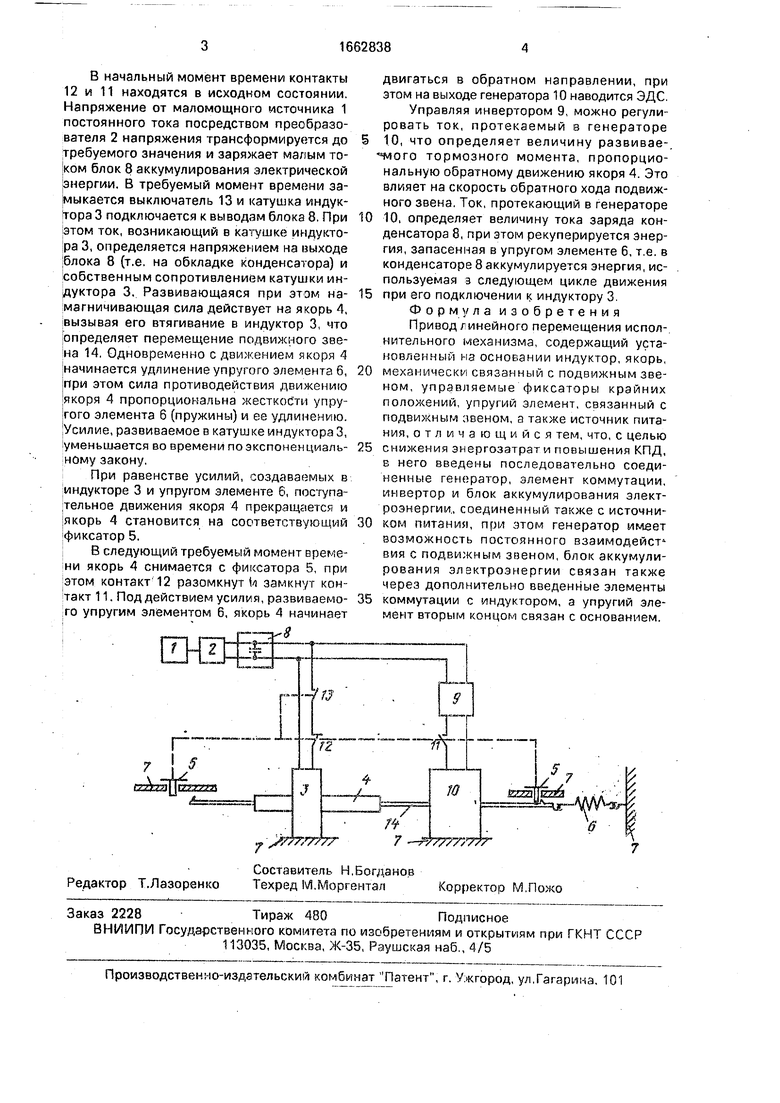
На чертеже изображена схема привода линейного перемещения
Устройство содержит источник 1 постоянного тока, преобразователь 2 напряжения, индуктор 3, якорь 4, управляемые фиксаторы 5 крайних положений, упругий элемент 6. основание 7, а также блок 8 аккумулирования электрической энергии, инвертор 9, генератор 10, элементы коммутации - нормально открытый 11 и нормально закрытый 12 контакты и выключатель 13, механически соединенные с фиксаторами 5. Источник 1 постоянного тока и преобразователь 2 напряжения представляют собой источник питания, блок 8 может быть выполнен в виде конденсатора, а индуктор 3 представляет собой, например, соленоид с якорем 4 из магнитомягкого материала С якорем 4 механически связано подвижное звено 14, взаимодействующее с генератором 10 и связанное с основанием 7 через упругий элемент 6
Привод линейного перемещения работает следующим образом
Qs
о го со
GJ 00
В начальный момент времени контакты 12 и 11 находятся в исходном состоянии. Напряжение от маломощного источника 1 постоянного тока посредством преобразователя 2 напряжения трансформируется до требуемого значения и заряжает малым то- ком блок 8 аккумулирования электрической энергии. В требуемый момент времени за- мыкается выключатель 13 и катушка индуктора 3 подключается к выводам блока 8. При этом ток, возникающий в катушке индуктора 3, определяется напряжением на выходе блока 8 (т.е. на обкладке конденсатора) и собственным сопротивлением катушки индуктора 3. Развивающаяся при этэм на- магничивающая сила действует на якорь 4, вызывая его втягивание в индуктор 3, что определяет перемещение подвижного звена 14. Одновременно сдвижением якоря 4 начинается удлинение упругого элемента 6, при этом сила противодействия движению якоря 4 пропорциональна жесткости упругого элемента 6 (пружины) и ее удлинению. Усилие, развиваемое в катушке индуктора 3, уменьшается во времени поэкспоненциаль- ному закону,
При равенстве усилий, создаваемых в индукторе 3 и упругом элементе 6, поступательное движения якоря 4 прекращается и |якорь 4 становится на соответствующий фиксатор 5.
В следующий требуемый момент времени якорь 4 снимается с фиксатора 5, при этом контакт 12 разомкнут to замкнут контакт 11. Под действием усилия, развиваемо- го упругим элементом 6, якорь 4 начинает
8
двигаться в обратном направлении, при этом на выходе генератора 10 наводится ЭДС. Управляя инвертором 9, можно регулировать ток, протекаемый в генераторе 10, что определяет величину развивав-. 1кмого тормозного момента, пропорциональную обратному движению якоря 4. Это влияет на скорость обратного хода подвижного звена. Ток, протекающий в генераторе 10, определяет величину тока заряда конденсатора 8, при этом рекуперируется энергия, запасенная в упругом элементе 6, т.е. в конденсаторе 8 аккумулируется энергия, используемая з следующем цикле движения при его подключении к индуктору 3. Формула изобретения Привод г инейного перемещения исполнительного механизма, содержащий установленный на основании индуктор, якорь, механически связанный с подвижным звеном, управляемые фиксаторы крайних положений, упругий элемент, связанный с подвижным звеном, а также источник питания, отличающийся тем, что, с целью снижения энергозатрат и повышения КПД, в него введены последовательно соединенные генератор, элемент коммутации, инвертор и блок аккумулирования электроэнергии, соединенный также с источником питания, при этом генератор имеет возможность постоянного взаимодейст1 вия с подвижным звеном, блок аккумулирования электроэнергии связан также через дополнительно введенные элементы коммутации с индуктором, а упругий элемент вторым концом связан с основанием.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАТИВНЫЙ ИНДУКЦИОННЫЙ ОБОГРЕВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ПОРТАТИВНЫМ ИНДУКЦИОННЫМ ОБОГРЕВАТЕЛЕМ | 2024 |
|
RU2825929C1 |
| Автономная гибридная энергоустановка | 2022 |
|
RU2792410C1 |
| Устройство для удаления льда с карнизов крыш зданий и сооружений | 2023 |
|
RU2826478C1 |
| ГЕНЕРАЦИЯ И РАСПРЕДЕЛЕНИЕ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 2020 |
|
RU2796080C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2424918C2 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| Стабилизированный вентильный аксиально-конический ветрогенератор постоянного тока | 2018 |
|
RU2688925C1 |
| ГЕНЕРАТОР БЕЛАШОВА | 1991 |
|
RU2025871C1 |
| Стабилизированный вентильный аксиально-радиальный ветрогенератор постоянного тока | 2018 |
|
RU2689211C1 |
| Тяговый инвертор электрогрузовика | 2024 |
|
RU2825486C1 |
Изобретение относится к машиностроению и может быть использовано для перемещения различных исполнительных механизмов, например руки манипулятора. Целью изобретения является повышение КПД и снижение энергозатрат. Устройство содержит источник питания, установленный на основании индуктор, якорь, управляемые фиксаторы крайних положений, упругий элемент, блок аккумулирования электрической энергии, инвертор и генератор, причем источник питания электрически соединен через блок аккумулирования электрической энергии с индуктором и инвертором, якорь механически связан с подвижным звеном, взаимодействующим с генератором. Упругий элемент связан с подвижным звеном и с основанием, а генератор электрически связан с инвертором. Для осуществления прямого хода подвижного звена блок аккумулирования электроэнергии, заряженный от источника питания, подключается к индуктору, в который при этом втягивается якорь. Обратный ход подвижного звена производится за счет растянутого упругого элемента, который при этом сжимается. В этом случае производится подключение генератора и инвертора к блоку аккумулирования электроэнергии, который подзаряжается. Таким образом, осуществляется рекуперация энергии, которая вновь используется при прямом ходе подвижного звена. 1 ил.
| Резонансный привод промышленного робота | 1987 |
|
SU1570892A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
