Изобретение относится к машиностроению, в частности к промышленным роботам, предназначенным для автоматизации основных и вспомогательных технологических операций.
Цель изобретения - расширение функциональных возможностей за счет обеспечения позиционирования подвижного звена робота в различных программно задаваемых точках рабочей зоны.
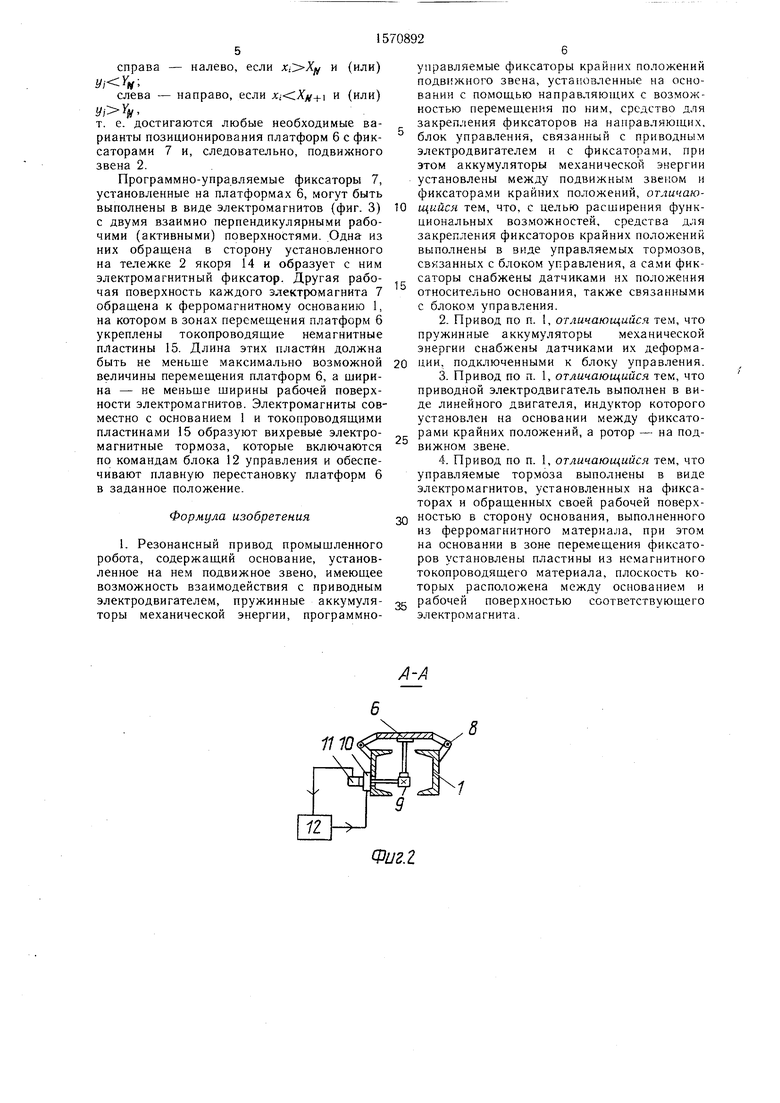
На фиг. 1 показано общее устройство привода; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вариант выполнения фиксаторов в виде электромагнитов; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - вариант с установкой датчика деформации пружинного аккумулятора механической энергии.
Привод содержит основание 1, подвижное звено 2, выполненное, например, в виде телс.-кчи, имеющее возможность переме- Г1,а.ъся относительно основания, приводной электродвигатель, например, линейный двигатель (ЛЭД), индуктор 3 которого жестко укреплен посередине основания 1, а вторич- .;.ш элемент (ротор 4) установлен на тележ- о 2, которая через аккумуляторы 5 механической энергии (пружины) связана с платформами 6, на которых установлены программно управляемые фиксаторы 7 крайних положений тележки. Платформы 6 имеют возможность перемещаться по направляющим 8, установленным на основание 1. При этом платформы 6 соединены механическими например реечными, передачами 9 с установленными на основании 1 управляемыми электромагнитными тормозами 10 и датчиками 11 положения, причем электродвигатель, программно-управляемые фиксаторы 7, электромагнитные тормоза 10 и датчики 11 положения электрически соединены с блоком 12 управления.
Привод работает следующим образом.
В исходном состоянии тележка 2 находится в одном из крайних положений, например краном (фиг. 1), которое зафиксировано еоо1зетствующим - правым программно- провляемым фиксатором 7. Аккумуляторы 5 леханической энергии заряжены. В блок 12
20 кируют платформы 6 с фиксаторами 7. Тележка 2, имеющая запас кинетической энергии, через аккумуляторы 5 приводит в движение по направляющим 8 платформы 6, причем текущие координаты х, и у, фиксаторов 7 непрерывно считываются датчиками 11 положения и передаются в блок 12 управления, где сравниваются с заданными XN и Ґ# . По окончании перестановки фиксаторов 7 в позиции с координатами XN и Yfj обесточиваются электромагнитные тормоза 10 и исключается возможность дальнейшего перемещения платформ 6. Теперь блок 12 управления разрешает подачу напряжения на индуктор 3 ЛЭД. В результате взаимодействия бегущего электромагнитного поля индуктора с вторичным элементом (ротором) 4 ЛЭД тележке 2 сообщается дополнительно некоторые количество энергии, необходимое для компенсации потерь на трение в механической части привода. При выходе вторичного элемента 4 из зоны индуктора 3 последний обесточивается по команде с блока 12 управ40 ления, а тележка 2 продолжает движение по инерции до остановки на левом фиксаторе 7. Аккумуляторы механической энергии 5 вновь заряжены. Блок 12 по истечении определяемого технологическим процессом вреуправления от датчиков 11 положения заве- 45 мени вновь выдает команду на отработку
дены координаты А ,- и у, расположения по отношению к основанию 1 соответственно левого и правого фиксаторов 7, которые сов- vu-сгчо с платформами 6 через реечные передачи 9 заблокированы от перемещения электромагнитными тормозами 10. При поступлении от блока 12 управления команды на отработку заданного перемещения растормаживается правый фиксатор 7 и под действием заряженных аккумуляторов 5 механической энергии начинается интенсивный разгон тележки 2 вдоль основания 1 в направлении левого фиксатора 7.
Пусть, например, координата х,Хц (где Xfif -- координата заданной точки позициозаданного перемещения тележки 2 теперь уже в противоположном направлении (слева-направо). Привод при этом работает аналогично и позволяет осуществить позиционирование фиксаторов 7, если их реаль- 50 ные координаты удовлетворяют неравенствам: x,OY/y-f 1 и (или) ( Индекс означает, что левый фиксатор 7 позиционируется по программе (Л/+1)-го цикла.
Таким образом, предложенный привод 55 позволяет осуществить позиционирование по заданной программе платформы 6 с программно-управляемым фиксаторами 7 во время движения подвижного звена 2:
0
о
нирования левого фиксатора 7 для /V-ro цикла движения тележки 2) и, если одновременно координата расположения правого фиксатора 7 (где Уд/ - координата заданной точки позиционирования этого фиксатора 7 для vV-ro цикла), то перестановка их в заданное положение осуществляется следующим образом. По мере разгона потенциальная энергия аккумуляторов 5 переходит в кинетическую энергию тележки 2, следовательно, силы, с которыми они воздействуют на платформы 6, уменьшаются. В момент времени, когда эти силы равны нулю, что определяется, например, при помощи датчиков 13 деформации (растяжения-
сжатия), установленных между аккумуляторами 5 и платформами 6, по команде от блока 12 подается напряжение питания па один (если х,Хц и ) или оба (если х,Хц и ) электромагнитных тормоза 10, которые через реечные передачи 9 разбло0 кируют платформы 6 с фиксаторами 7. Тележка 2, имеющая запас кинетической энергии, через аккумуляторы 5 приводит в движение по направляющим 8 платформы 6, причем текущие координаты х, и у, фиксаторов 7 непрерывно считываются датчиками 11 положения и передаются в блок 12 управления, где сравниваются с заданными XN и Ґ# . По окончании перестановки фиксаторов 7 в позиции с координатами XN и Yfj обесточиваются электромагнитные тормоза 10 и исключается возможность дальнейшего перемещения платформ 6. Теперь блок 12 управления разрешает подачу напряжения на индуктор 3 ЛЭД. В результате взаимодействия бегущего электромагнитного поля индуктора с вторичным элементом (ротором) 4 ЛЭД тележке 2 сообщается дополнительно некоторые количество энергии, необходимое для компенсации потерь на трение в механической части привода. При выходе вторичного элемента 4 из зоны индуктора 3 последний обесточивается по команде с блока 12 управ0 ления, а тележка 2 продолжает движение по инерции до остановки на левом фиксаторе 7. Аккумуляторы механической энергии 5 вновь заряжены. Блок 12 по истечении определяемого технологическим процессом вре5
5
мени вновь выдает команду на отработку
заданного перемещения тележки 2 теперь уже в противоположном направлении (слева-направо). Привод при этом работает аналогично и позволяет осуществить позиционирование фиксаторов 7, если их реаль- ные координаты удовлетворяют неравенствам: x,OY/y-f 1 и (или) ( Индекс означает, что левый фиксатор 7 позиционируется по программе (Л/+1)-го цикла.
Таким образом, предложенный привод позволяет осуществить позиционирование по заданной программе платформы 6 с программно-управляемым фиксаторами 7 во время движения подвижного звена 2:
справа - налево, если и (или)
слева - направо, если и (или)
т. е. достигаются любые необходимые варианты позиционирования платформ 6 с фиксаторами 7 и, следовательно, подвижного звена 2.
Программно-управляемые фиксаторы 7, установленные на платформах б, могут быть
управляемые фиксаторы крайних положений подвижного звена, установленные на основании с помощью направляющих с возможностью перемещения по ним, средство для закрепления фиксаторов на направляющих, блок управления, связанный с приводным электродвигателем и с фиксаторами, при этом аккумуляторы механической энергии установлены между подвижным звеном и фиксаторами крайних положений, отличаювыполнены в виде электромагнитов (фиг. 3) 10 щийся тем, что, с целью расширения функс двумя взаимно перпендикулярными рабочими (активными) поверхностями. Одна из них обращена в сторону установленного на тележке 2 якоря 14 и образует с ним электромагнитный фиксатор. Другая рабочая поверхность каждого электромагнита 7 обращена к ферромагнитному основанию 1, на котором в зонах перемещения платформ 6 укреплены токопроводящие немагнитные пластины 15. Длина этих пластин должна
15
циональных возможностей, средства для закрепления фиксаторов крайних положений выполнены в виде управляемых тормозов, связанных с блоком управления, а сами фиксаторы снабжены датчиками нх положения относительно основания, также связанными с блоком управления.
2. Привод по п. 1, отличающийся тем, что пружинные аккумуляторы механической энергии снабжены датчиками их деформабыть не меньше максимально возможной 20 ции, подключенными к блоку управления. величины перемещения платформ 6, а шири-3. Привод по п. 1, отличающийся тем, что
на - не меньше ширины рабочей поверхности электромагнитов. Электромагниты совместно с основанием 1 и токопроводящими
приводной электродвигатель выполнен в виде линейного двигателя, индуктор которого установлен на основании между фиксатопластинами 15 образуют вихревые электро-рами крайних положений, а ротор - на подмагнитные тормоза, которые включаются по командам блока 12 управления и обеспечивают плавную перестановку платформ 6 в заданное положение.
Формула изобретения
1. Резонансный привод промышленного робота, содержащий основание, установленное на нем подвижное звено, имеющее возможность взаимодействия с приводным
вижном звене.
4. Привод по п. 1, отличающийся тем, что управляемые тормоза выполнены в виде электромагнитов, установленных на фиксаторах и обращенных своей рабочей поверх- 3Q ностью в сторону основания, выполненного из ферромагнитного материала, при этом на основании в зоне перемещения фиксаторов установлены пластины из немагнитного токопроводящего материала, плоскость которых расположена между основанием и
электродвигателем, пружинные аккумуля- рабочей поверхностью соответствующего
торы механической энергии, программно- электромагнита.
управляемые фиксаторы крайних положений подвижного звена, установленные на основании с помощью направляющих с возможностью перемещения по ним, средство для закрепления фиксаторов на направляющих, блок управления, связанный с приводным электродвигателем и с фиксаторами, при этом аккумуляторы механической энергии установлены между подвижным звеном и фиксаторами крайних положений, отличаю
циональных возможностей, средства для закрепления фиксаторов крайних положений выполнены в виде управляемых тормозов, связанных с блоком управления, а сами фиксаторы снабжены датчиками нх положения относительно основания, также связанными с блоком управления.
2. Привод по п. 1, отличающийся тем, что пружинные аккумуляторы механической энергии снабжены датчиками их деформаприводной электродвигатель выполнен в виде линейного двигателя, индуктор которого установлен на основании между фиксато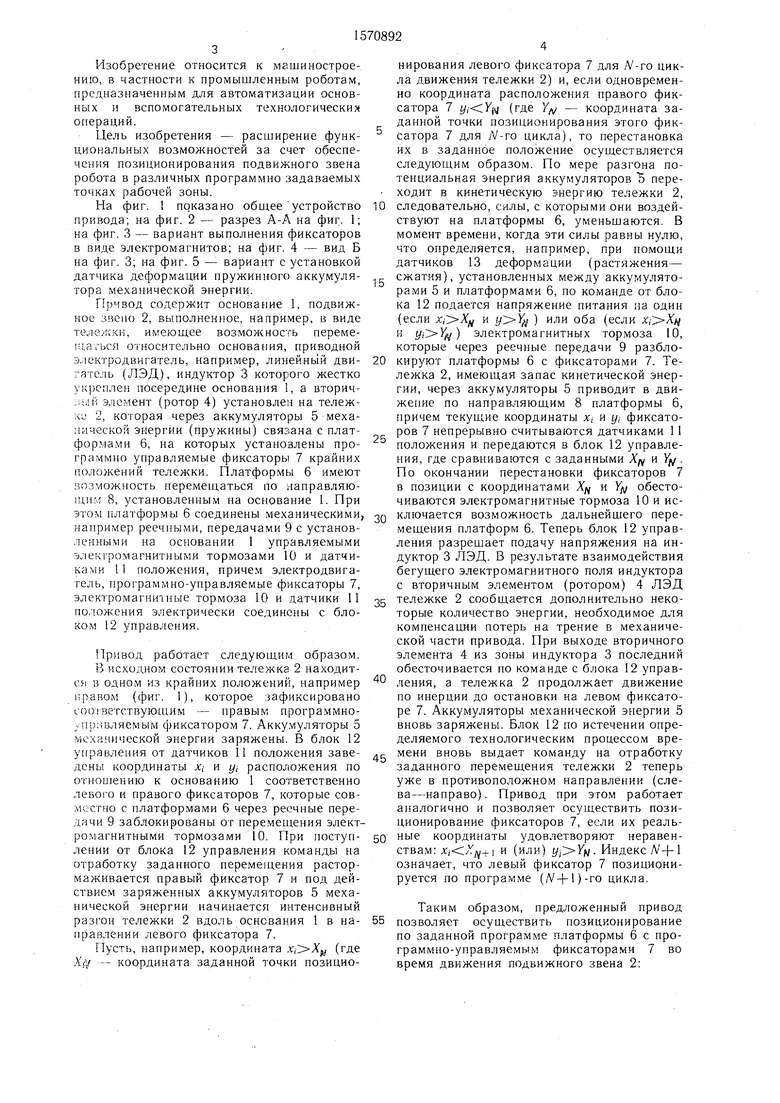
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1991 |
|
SU1799725A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Устройство для отделения наноспутников с заданными параметрами от сегмента МКС | 2016 |
|
RU2653666C2 |
| Модуль манипулятора | 1991 |
|
SU1798177A1 |
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
| Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете | 2018 |
|
RU2668768C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО | 2011 |
|
RU2461923C1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов. Целью изобретения является расширение функциональных возможностей за счет обеспечения позиционирования подвижного звена робота в различных программно задаваемых точках рабочей зоны. Привод содержит установленное на основании 1 подвижное звено 2, связанное через пружинные аккумуляторы механической энергии 5 с платформами 6, на которых расположены программно управляемые фиксаторы 7 крайних положений подвижного звена. Платформы 6 имеют возможность перемещения относительно основания 1 по направляющим 8, величину которого определяют с помощью датчиков положения. Платформы 6 закрепляются на направляющих 8 в требуемых положениях с помощью управляемых тормозов, например электромагнитных. Для компенсации потерь на трение в механических частях привода служит приводной электродвигатель, например, линейного типа, индуктор 3 которого расположен на основании 1, а ротор 4 - на подвижном звене 2. Электродвигатель, датчики положения платформ 6, фиксаторы 7 и тормоза связаны с блоком управления 12, по командам которого осуществляется работа устройства. Для позиционирования звена 2 в требуемых положениях производится растормаживание платформ 6 и их переустановка непосредственно в процессе перемещения звена 2 под действием кинетической энергии. Приводной электродвигатель включается только в момент прохождения звена 2 над индуктором 3. Пружинные аккумуляторы 5 могут быть снабжены датчиками деформации, подключенными к блоку управления 12, по сигналам которых осуществляется растормаживание платформ 6. 3 з.п. ф-лы, 5 ил.
Фиг.I
/
ZZ Z/
Вид 6
фигЛ
| Закрытый подшипник | 1928 |
|
SU10623A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
