1
(21)4666626/03 (22) 23.03,89 (46)15.08.91. Бюл. №30
(71)Сибирский автомобильно-дорожный институт им. В. В. Куйбышева
(72)В. Ф чмельченко и Д. В, Захаров (53)621.8.9,23(088.8)
(56) Машины для землеройных работ. Под ред. Ю. А. Ветрова. Вища школа, 1976, с. 239,
Авторское свидетельство СССР № 1158692, кл. Е 02 F 3/26, 1985.
(54) УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ БУЛЬДОЗЕРА (57) Изобретение относится к строительным дорожным машинам. Цель изобретения - повышение произв-сти бульдозера за счет регулирования положения рабочего органа (РО) в зависимости от величины сопротивления грунта срезу. Устройство содержит гидроцилиндр 2, соединенный с электрогид- рораспределителем 5, катушки 6 и 7 которого соединены с блоком управления (БУ) посредством электронного ключа. Послед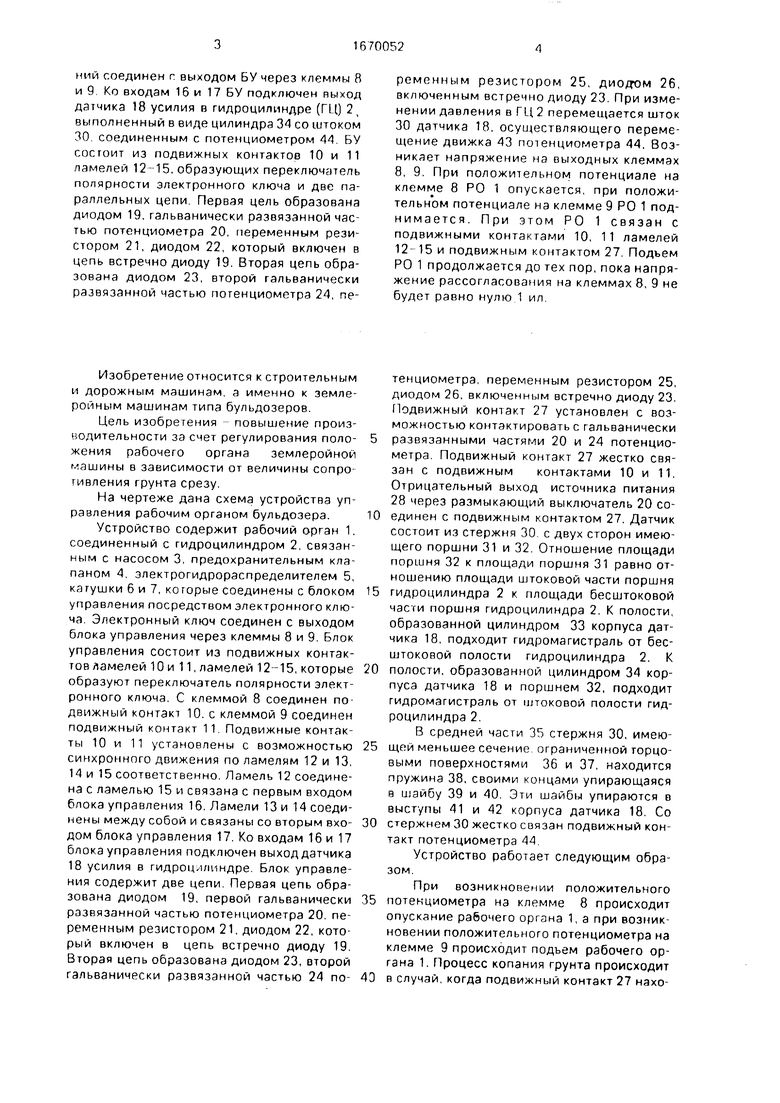
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дозирования | 1981 |
|
SU987586A1 |
| Устройство для дозирования | 1979 |
|
SU809079A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 2010 |
|
RU2428333C1 |
| Устройство для защиты преобразователя | 1983 |
|
SU1127038A2 |
| Устройство для автоматического регулирования режима привода подачи рабочего органа проходческого щита | 1980 |
|
SU876996A1 |
| ВЫКЛЮЧАТЕЛЬ ТОКА | 1997 |
|
RU2121752C1 |
| Устройство для автоматического контроля и управления уборочной машиной | 1975 |
|
SU547799A1 |
| Дифференциальный выпрямитель | 1979 |
|
SU864156A1 |
| Устройство для регулирования давления | 1986 |
|
SU1409987A2 |
| Устройство дистанционного управления исполнительным механизмом | 1981 |
|
SU1040465A1 |
Изобретение относится к строительным дорожным машинам. Цель изобретения - повышение произв-сти бульдозера за счет регулирования положения рабочего органа /РО/ в зависимости от величины сопротивления грунта срезу. Устройство содержит гидроцилиндр 2, соединенный с электрогидрораспределителем 5, катушки 6 и 7 которого соединены с блоком управления (БУ) посредством электронного ключа. Последний соединен с выходом БУ через клеммы 8 и 9. Ко входам 16 и 17 БУ подключен выход датчика 18 усилия в гидроцилиндре /ГЦ/ 2, выполненный в виде цилиндра 34 со штоком 30, соединенным с потенциометром 44. БУ состоит из подвижных контактов 10 и 11 ламелей 12 - 15, образующих переключатель полярности электронного ключа и две параллельные цепи. Первая цепь образована диодом 19, гальванически развязанной частью потенциометра 20, переменным резистором 21, диодом 22, который включен в цепь встречно диоду 19. Вторая цепь образована диодом 23, второй гальванически развязанной частью потенциометра 24, переменным резистором 25, диодом 26, включенным встречно диоду 23. При изменении давления в ГЦ 2 перемещается шток 30 датчика 18, осуществляющего перемещение движка 43 потенциометра 44. Возникает напряжение на выходных клеммах 8, 9. При положительном потенциале на клемме 8 РО 1 опускается, при положительном потенциале на клемме 9 РО 1 поднимается. При этом РО 1 связан с подвижными контактами 10, 11 ламелей 12 - 15 и подвижным контактом 27. Подъем РО 1 продолжается до тех пор, пока напряжение рассогласования на клеммах 8, 9 не будет равно нулю. 1 ил.
И t
О
XI о о ел
го
ний соединен г выходом БУ через клеммы 8 и 9 Ко входам 16 и 17 БУ подключен выход датчика 18 усилия в гидроцилиндре (ГЦ) 2 выполненный в виде цилиндра 34 со штоком 30 соединенным с потенциометром 44 БУ состоит из подвижных контактов 10 и 11 ламелей 12-15, образующих переключатель полярности электронного ключа и две параллельных цепи Первая цель образована диодом 19, гальванически развязанной частью потенциометра 20, переменным резистором 21, диодом 22, который включен в цепь встречно диоду 19. Вторая цепь образована диодом 23, второй гальванически развязанной частью потенциометра 24, пеИзобретение относится к строительным и дорожным машинам, а именно к землеройным машинам типа бульдозеров.
Цель изобретения - повышение производительности за счет регулирования положения рабочего органа землеройной машины в зависимости от величины сопротивления грунта срезу.
На чертеже дана схема устройства управления рабочим органом бульдозера.
Устройство содержит рабочий орган 1. соединенный с гидроцилиндром 2, связанным с насосом 3, предохранительным клапаном 4. электрогидрораспределителем 5, кагушки 6 и 7, которые соединены с блоком управления посредством электронного ключа Электронный ключ соединен с выходом блока управления через клеммы 8 и 9. Блок управления состоит из подвижных контактов ламелей 10 и 11, ламелей 12-15, которые образуют переключатель полярности электронного ключа. С клеммой 8 соединен подвижный контакт 10. с клеммой 9 соединен подвижный контакт 11 Подвижные контакты 10 и 11 установлены с возможностью синхронного движения по ламелям 12 и 13, 14 и 15 соответственно. Ламель 12 соединена с ламелью 15 и связана с первым входом блока управления 16. Ламели 13 и 14 соединены между собой и связаны со вторым входом блока управления 17. Ко входам 16 и 17 блока управления подключен выход датчика 18 усилия в гидроцллиндре Блок управления содержит две цели. Первая цепь образована диодом 19, первой гальванически развязанной частью потенциометра 20. переменным резистором 21, диодом 22, который включен в цепь встречно диоду 19. Вторая цепь образована диодом 23, второй гальванически развязанной частью 24 поременным резистором 25, диодом 26, включенным встречно диоду 23. При изменении давления в ГЦ 2 перемещается шток 30 датчика 18, осуществляющего перемещение движка 43 потенциометра 44. Возникает напряжение на выходных клеммах 8, 9. При положительном потенциале на клемме 8 РО 1 опускается, при положительном потенциале на клемме 9 РО 1 поднимается. При этом РО 1 связан с подвижными контактами 10, 11 ламелей и подвижным контактом 27. Подъем РО 1 продолжается до тех пор, пока напряжение рассогласования на клеммах 8, 9 не будет равно нулю 1 ил
тенциометра, переменным резистором 25, диодом 26, включенным встречно диоду 23. Подвижный контакт 27 установлен с возможностью контактировать с гальванически
развязанными частями 20 и 24 потенциометра. Подвижный контакт 27 жестко связан с подвижным контактами 10 и 11. Отрицательный выход источника питания 28 через размыкающий выключатель 20 соединен с подвижным контактом 27. Датчик состоит из стержня 30 с двух сторон имеющего поршни 31 и 32. Отношение площади поршня 32 к площади поршня 31 равно отношению площади штоковой части поршня
гидроцилиндра 2 к площади бесштоковой части поршня гидроцилиндра 2. К полости, образованной цилиндром 33 корпуса датчика 18, подходит гидромагистраль от бесштоковой полости гидроцилиндра 2, К
полости, образованной цилиндром 34 корпуса датчика 18 и поршнем 32, подходит гидромагистраль от штоковой полости гидроцилиндра 2.
В средней части 35 стержня 30, имеющей меньшее сечение ограниченной торцовыми поверхностями 36 и 37, находится пружина 38, своими концами упирающаяся в шайбу 39 и 40. Эти шайбы упираются в выступы 41 и 42 корпуса датчика 18. Со
стержнем 30 жестко связан подвижный контакт потенциометра 44
Устройство работает следующим образом.
При возникновении положительного
потенциометра на клемме 8 происходит опускание рабочего органа 1, а при возникновении положительного потенциометра на клемме 9 происходит подъем рабочего органа 1. Процесс копания грунта происходит
в случай, когда подвижный контакт 27 находится на второй гальванически разпя зм юи части 24 потенциометра и следоватепьно подвижный контакт 10 находится на ламели 13 а подвижный контакт 11 на ЛТМРПИ 15 При увеличрнии сопротивления грунта гоечу увелишвается давление в штоковпй плоскости гидроцилиндра 2 и соответст п°нно в плоскости цилиндра 34 датчике) 18 Под действием этого дэвления стержень 30 i днимается вместе с подвижным контак ом тотрнциомотра 14 Баланс схемы пару 4j i гя и точке 16 появляется
плох тельный потенциал Рабочий орган by ь )ч р i поднимается до ликвидаиии
s чэ i i гиг пгования При /менмм нии ( шрошчл . ipynга срезу лояожчтель mi и пт( i 1/1,14 n i 1чется ч точке 17 Габо ч и и ) г г н II л i i см г тп гкается i L и jt, i г ,з т i i 1 ч лс г //кз д я н ют, i иi ,г ; ч пл рр i
i i i iv с т f ° ч тветствпн
t i к ) J 1 О л J i i- ч
, i i т и n , Р i и я
vc , i. у , тв юн i раСх ,им орга
ЭiU TIO K)iJ ( ГИ )Г1рИВРЛ
01г U /Т ГИДГ)ОЦИ Н1Н
;Г lfr многоt v Tf i и/pLf acnpe
Д( И 3 t- i T . I К I С J1 ГМ ЧТО L
i м n 1,31 L 13i L i i M н ости ма ,i ин( ri 4 i и -ft HI ii r lo/fpii ч районе г органа 5vn о1 , i и к имости от л- ич i t о ir r г к i ,-f r с н i i резу оно Ct / н пиком /и 1й в гидроцилинд р и inr i t ином i аи, i it- ндра со штс ком | ординснш innc rt нциометром
источни1 j i IHT MI и т мэм употчления
включающим потенциометр состоящий из двух гальванически развязанных частей, два переменных резистора четыре диода и четыре ломели причем первая ломель сое динена с четвертой а вторая с третьей катоды первого и второго диодов объедине ны и соединены г первой ламелью а катоды третьего и четвертого диеюь обьединень. и соединены с второй ламелью один вывод первой гальванически развязанной части потенциометра соединен с анодом первого диода а другой вывод через первый переменный резистор соединен с анодов третьего диода один вывод ьторой гзльванически развязанной части потенциометра соединен с анодом второго диода, а другой вывод через второй переменный ре- чистор с анодом четвертого диода катоды первого и второго диодов являются первым входом бпока управления а катоды третьего и четвертого диодов являются вторыми входами блока управления подвижные контак- ть ламелеи являются двумя выходами блока управления два вывода потенциометра датчика давления соединены соответственно с первым и вторым входами блока управления подвижный контакт потенциометра датчика давления в гидроцилиндре подключен к положительному выводу источника питания отрицательный выход которого соединен через выключатель с подвижным контактом потенциометре блока управле нич входы датчика давления соединены со штоковои и поршневой полостями гидроцилиндра а выходы управления соединены с соответствующими электромагнитами электрогидрораспределителя
