Изобретение относится к машиностроению и может быть использовано в приводах механизмов и машин общего и специального назначения.
Цель изобретения - повышение нагрузочной способности и КПД червячной передачи путем исключения повторного контакта и выбора благоприятного расположения линий контакта.
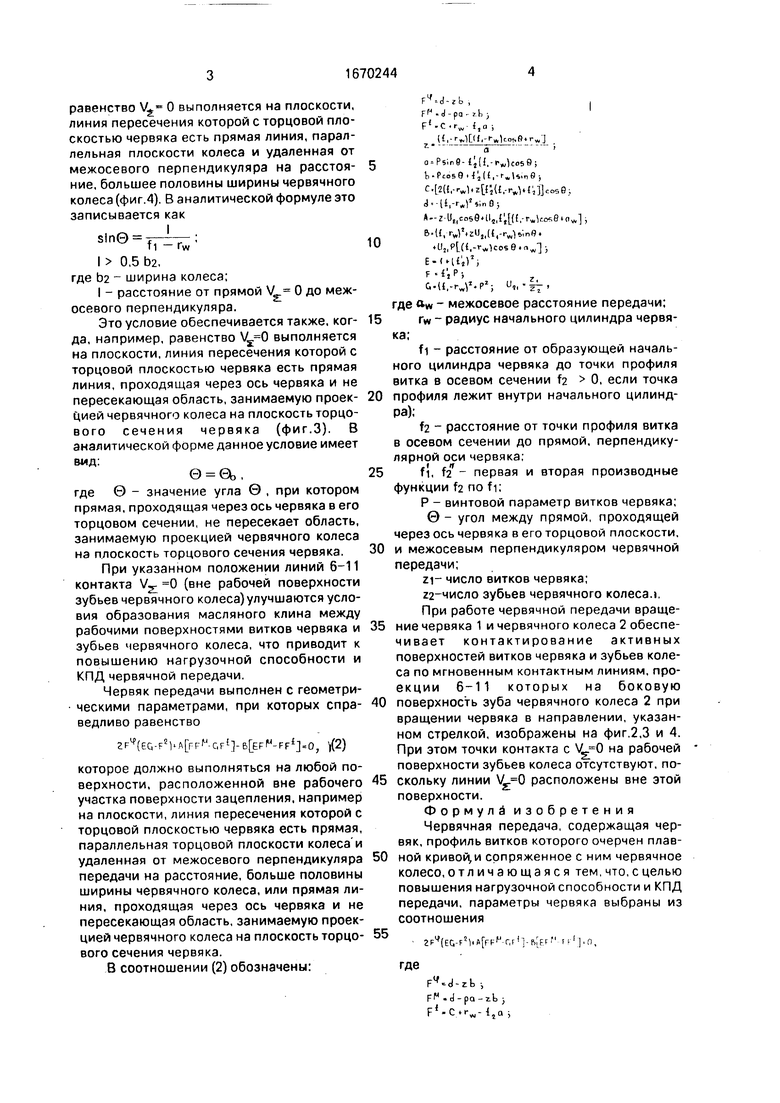
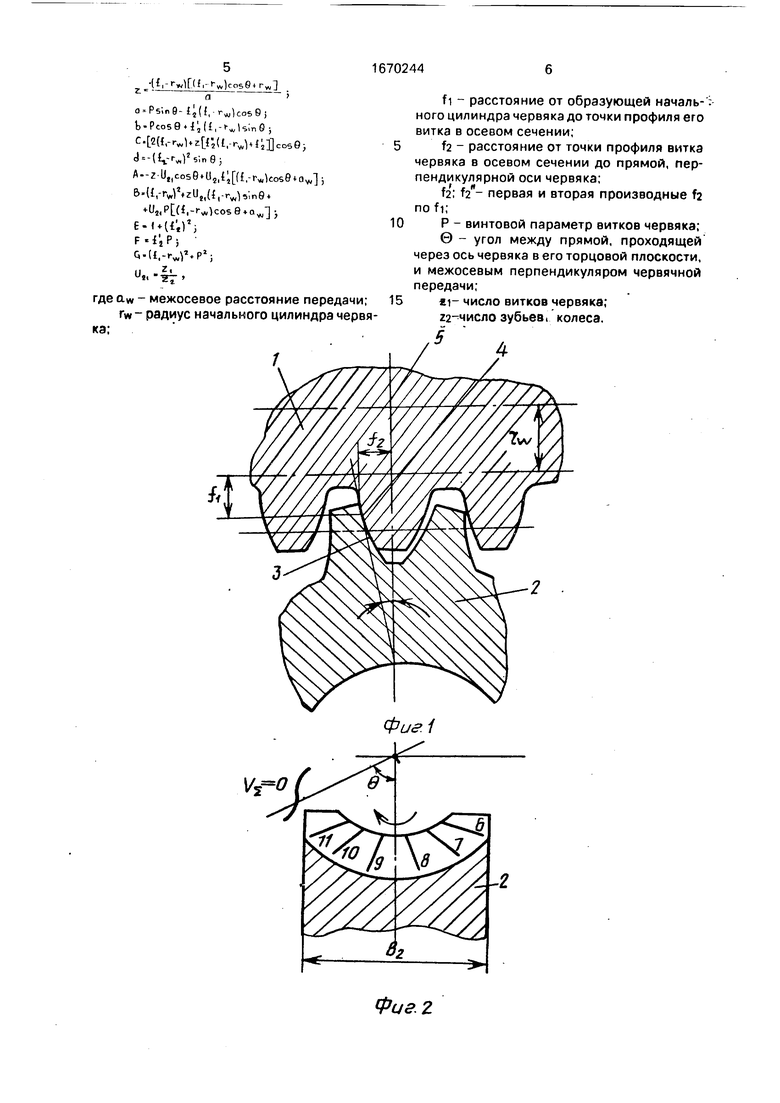
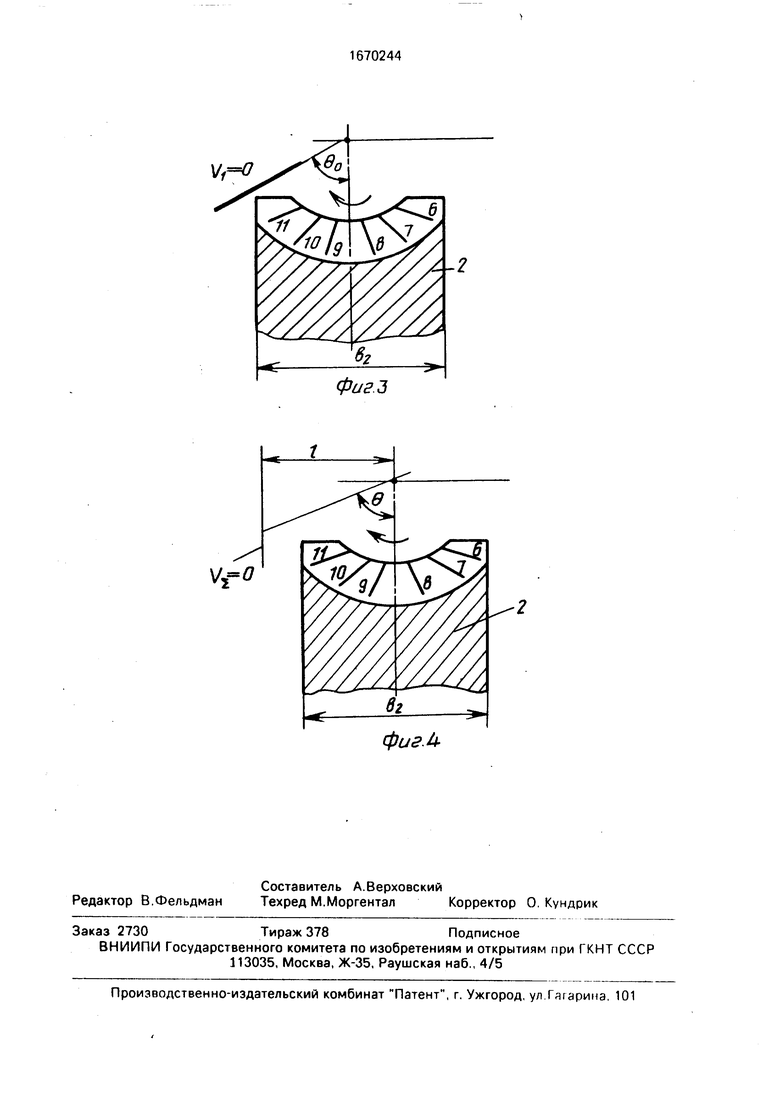
На фиг.1 показана червячная передача в средней торцовой плоскости червячного колеса; на фиг.2 - последовательные положения мгновенных контактных линий на боковой поверхности зуба червячного колеса и положение линии V 0, на которой точки контакта имеют суммарную скорость в направлении, перпендикулярном линии контакта, равную нулю; на фиг.З - положение контактных линий на боковой поверхности зуба червячного колеса, когда поверхность есть плоскость, проходящая через ось червяка под углом 0 Ofc,; на фиг.4 - положение контактных линий на боковой поверхности зуба червячного колеса, когда
поверхность V 0 есть плоскость, параллельная торцовой плоскости колеса.
Червячная передача (фиг.1) содержит червяк 1 и сопряженное с ним червячное колесо 2. Профиль витков червяка очерчен кривой 3. Точка 4 профиля витка червяка в осевом сечении находится на расстоянии f i от начального цилиндра червяка и на расстоянии f2 от прямой 5, перпендикулярной оси червяка. Суммарная скорость точек контакта витков червяка с поверхностями зубьев сопряженного колеса в направлении, перпендикулярном линии контакта такой передачи, определяется соотношением
zF Ec-f Mfrf r, (1)
(fG-Fs)(f f F FЈ C;fFl)7J0-
Скорость Vs равна нулю, если числитель выражения (1) равен нулю. Если точки контакта с V. 0 расположены за пределами поверхности зубьев червячного колеса (фиг.2), то на линиях контакта витков червяка и зубьев червячного колеса отсутствуют точки контакта, в которых V.,. 0. Данное условие обеспечивается, когда, например,
v „
Ё
О
VJ
о ю
Јь
равенство V 0 выполняется на плоскости, линия пересечения которой с торцовой плоскостью червяка есть прямая линия, параллельная плоскости колеса и удаленная от межосевого перпендикуляра на расстояние, большее половины ширины червячного колеса (фиг.4). В аналитической формуле это записывается как
I 0,5 D2,
где 02 ширина колеса;
I - расстояние от прямой V 0 до межосевого перпендикуляра.
Это условие обеспечивается также, когда, например, равенство V 0 выполняется на плоскости, линия пересечения которой с торцовой плоскостью червяка есть прямая линия, проходящая через ось червяка и не пересекающая область, занимаемую проекцией червячного колеса на плоскость торцо- вого сечения червяка (фиг.З). В аналитической форме данное условие имеет вид:
где 0 - значение угла 0 , при котором прямая, проходящая через ось червяка в его торцовом сечении, не пересекает область, занимаемую проекцией червячного колеса на плоскость торцового сечения червяка.
При указанном положении линий 6-11 контакта VЈ 0 (вне рабочей поверхности зубьев червячного колеса) улучшаются условия образования масляного клина между рабочими поверхностями витков червяка и зубьев червячного колеса, что приводит к повышению нагрузочной способности и КПД червячной передачи.
Червяк передачи выполнен с геометрическими параметрами, при которых справедливо равенство
EFV(EG-Fe)iA FFf4rt -B EFM-FFЈ 0, ft.)
которое должно выполняться на любой поверхности, расположенной вне рабочего участка поверхности зацепления, например на плоскости, линия пересечения которой с торцовой плоскостью червяка есть прямая, параллельная торцовой плоскости колеса и удаленная от межосевого перпендикуляра передачи на расстояние, больше половины ширины червячного колеса, или прямая линия, проходящая через ось червяка и не пересекающая область, занимаемую проекцией червячного колеса на плоскость торцового сечения червяка.
В соотношении (2) обозначены:
0
F -J-zb,
Ff-d-pa bj
.г„ ita ;
U..-l-JtoHfi. г..-- - ;
,9-l t(l..fv Cab6i b-PcoseiJid.-r.ls.ne j
({rrwi.,U,-rwv i :°se;
J--ll,
-z-U,l s9 U4l{;({,-rv,,, B U.rgSziyt.-rjim. Uz,pL(i,- -)cose.
F 1 j P ,
b.U.-rJ. U,,.|i-,
где ftw - межосевое расстояние передачи; 5 г радиус начального цилиндра червяка;
fl - расстояние от образующей начального цилиндра червяка до точки профиля витка в осевом сечении г 0, если точка 0 профиля лежит внутри начального цилиндра);
f2 - расстояние от точки профиля витка в осевом сечении до прямой, перпендикулярной оси червяка;
5 fi, fa - первая и вторая производные функции fa no fi;
Р - винтовой параметр витков червяка;
0 - угол между прямой, проходящей
через ось червяка в его торцовой плоскости,
0 и межосевым перпендикуляром червячной
передачи;
zi число витков червяка; za-число зубьев червячного колеса.i. При работе червячной передачи враще- 5 ние червяка 1 и червячного колеса 2 обеспе- чивает контактирование активных поверхностей витков червяка и зубьев колеса по мгновенным контактным линиям, проекции 6-11 которых на боковую 0 поверхность зуба червячного колеса 2 при вращении червяка в направлении, указанном стрелкой, изображены на фиг.2,3 и 4. При этом точки контакта с V 0 на рабочей поверхности зубьев колеса отсутствуют, по- 5 скольку линии .0 расположены вне этой поверхности.
Формула изобретения Червячная передача, содержащая червяк, профиль витков которого очерчен плав- 0 ной кривой,и сопряженное с ним червячное колесо, отличающаяся тем, что, с целью повышения нагрузочной способности и КПД передачи, параметры червяка выбраны из соотношения 5
2РЧЕС;-Рг1.,
где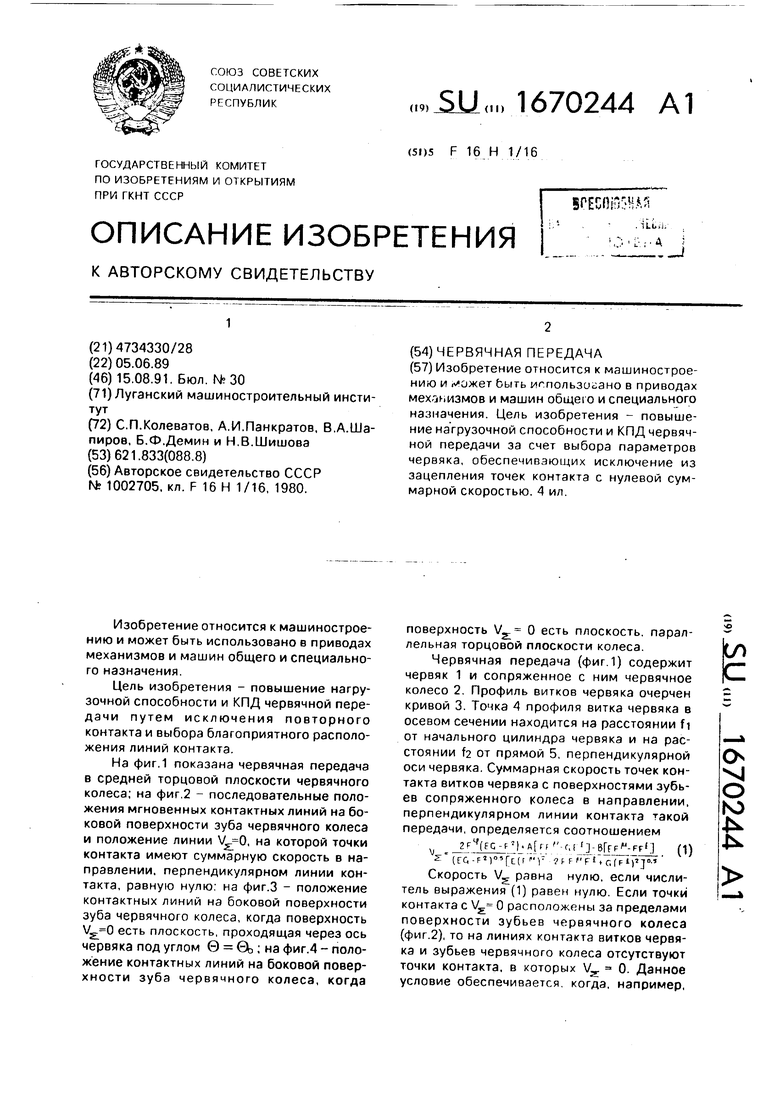
| название | год | авторы | номер документа |
|---|---|---|---|
| Червячная передача | 1989 |
|
SU1672039A1 |
| Червячная передача | 1989 |
|
SU1679086A1 |
| Способ нарезания червячного колеса | 1980 |
|
SU952480A1 |
| Способ изготовления червячной передачи | 1979 |
|
SU837636A1 |
| Зубчатая передача с перекрещивающимися осями | 1966 |
|
SU208396A1 |
| Ортогональная обратно-конусная спироидная передача | 1973 |
|
SU690212A1 |
| Червячная передача | 1979 |
|
SU796566A1 |
| Червячный инструмент | 1980 |
|
SU931334A1 |
| Червячная передача | 1983 |
|
SU1227860A1 |
| ОРТОГОНАЛЬНАЯ ДВУХМОДУЛЬНАЯ ЧЕРВЯЧНАЯ ПЕРЕДАЧА | 1999 |
|
RU2159370C2 |
Изобретение относится к машиностроению и может быть использовано в приводах механизмов и машин общего и специального назначения. Цель изобретения - повышение нагрузочной способности и коэффициента полезного действия червячной передачи за счет выбора параметров червяка, обеспечивающих исключение из зацепления точек контакта с нулевой суммарной скоростью. 4 ил.
F4-d-zbi
F-l4 -d-pa -zb ; „:
tfi-r rUi- fw)cosвt гw
e-Ps .nQ- l t(i, r lcosG; b-Pcos9 i;,({,-i-,Js;n6; C.2({,-rwUz r2(t,-rw fiJcose (k-UZ5;n9;
A-z.ut(,,-rwkose Q e.-{i,- -v,),1(f(-rj,;n9 +
2lP(f1-r1,,), E-(-(f «)5;
f i tP;
b-d.
us,z,
где aw - межосевое расстояние передачи; 15
rw радиус начального цилиндра червяка;
1670244
0
5
fi - расстояние от образующей начального цилиндра червяка до точки профиля его витка в осевом сечении;
f2 - расстояние от точки профиля витка червяка в осевом сечении до прямой, перпендикулярной оси червяка;
2 и первая и вторая производные f по fi;
Р - винтовой параметр витков червяка;
0 - угол между прямой, проходящей через ось червяка в его торцовой плоскости, и межосевым перпендикуляром червячной передачи;
«1- число витков червяка;
72-число зубьев i колеса.
4
Фие.1
Фиг. г
фиг.З
Ar0
фигЛ
| Червячная цилиндрическая передача | 1981 |
|
SU1002705A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
