1
(21)4332815/07 (22)31.08.87 (46)15.08.91. Бюл. №30
(71)Специальное конструкторско-твхноло- гическое бюро Искра при Ворошиловград- ском машиностроительном институте
(72)В.И.Караченцев, Ю.В.Христофоров и Ю.Г.Войлов (53)621.723.316(088.8)
(56)Авторское свидетельство СССР № 656384, кл. Н 01 Р 3/48, 1976.
Авторское свидетельство СССР № 1267580, кл. И 02 Р 7/42, 1976.
(54) ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА
(57)Изобретение относится к электротехнике, а именно к управляемым электроприводам переменного тока, и может быть использовано, например, для приводов роботов и манипуляторов, где массогабарит- ные показатели и надежность являются определяющими. Целью изобретения является увеличение точности и диапазона регулирования частоты вращения. В электропривод, содержащий асинхронный двигатель 1 с короткоэамкнутым ротором, с техфазной силовой 2 и двумя измерительными обмотками 3, 4 на статоре, введена обмотка возбуждения 11, также расположенная на статоре и подключенная выводами к выходам генератора высокой частоты 9. Все измерительные обмотки выполнены в виде последовательно соединен- ных катушек на зубцах статора с определенным порядком включения. При этом обеспечивается повышение точности формирования сигнала обратной связи по частоте вращения и привода в целом. 2 з.п, ф-лы, 3 ил.
сл
С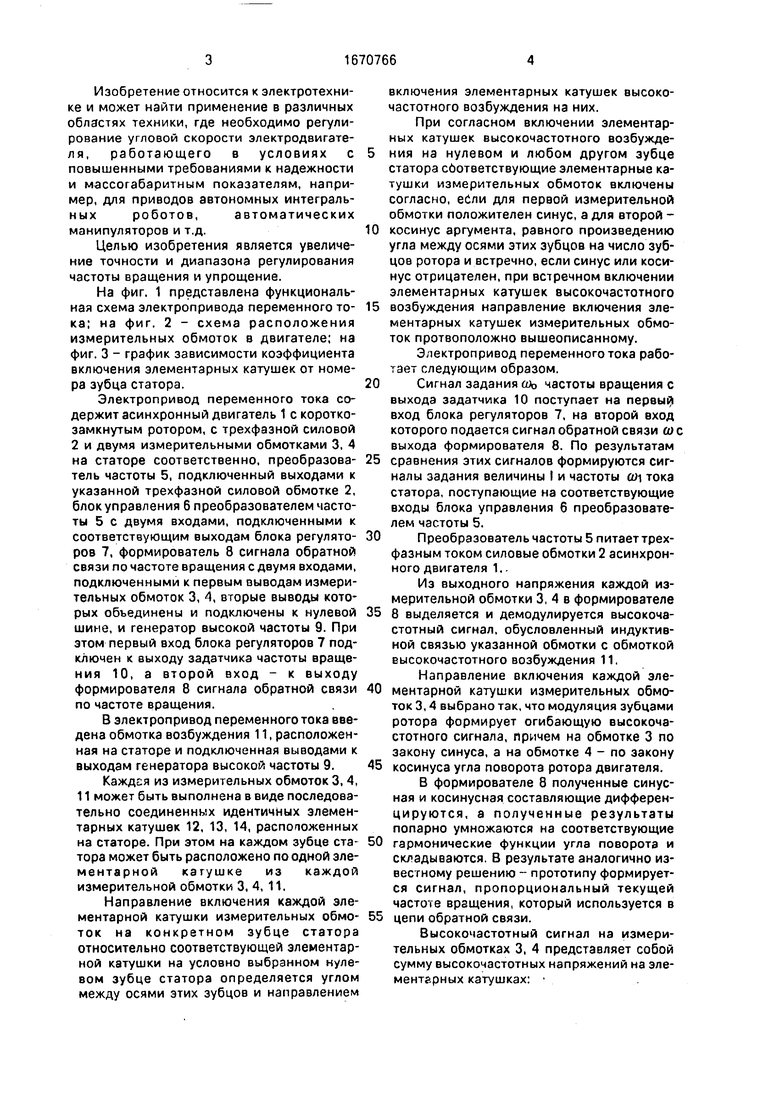


Изобретение относится к электротехнике, а именно к управляемым электроприводам переменного тока, и может быть использовано, например, для приводов роботов и манипуляторов, где массогабаритные показатели и надежность является определяющими. Целью изобретения является увеличение точности и диапазона регулирования частоты вращения. В электропривод, содержащий асинхронный двигатель 1 с короткозамкнутым ротором, с трехфазной силовой 2 и двумя измерительными обмотками 3, 4 на статоре, введена обмотка возбуждения 11, также расположенная на статоре и подключенная выводами к выходам генератора высокой частоты 9. Все измерительные обмотки выполнены в виде последовательно соединенных катушек на зубцах статора с определенным порядком включения. При этом обеспечивается повышение точности формирования сигнала обратной связи по частоте вращения и привода в целом. 2 з.п.ф-лы, 3 ил.
С и стена частотно - | токобого регулирования |
Фиг.1
/;
О х|
О VI
О О
Изобретение относится к электротехнике и может найти применение в различных областях техники, где необходимо регулирование угловой скорости электродвигателя, работающего в условиях с повышенными требованиями к надежности и массогабаритным показателям, например, для приводов автономных интегральных роботов, автоматических манипуляторов и т.д.
Целью изобретения является увеличение точности и диапазона регулирования частоты вращения и упрощение.
На фиг. 1 представлена функциональная схема электропривода переменного тока; на фиг. 2 - схема расположения измерительных обмоток в двигателе; на фиг. 3 - график зависимости коэффициента включения элементарных катушек от номера зубца статора.
Электропривод переменного тока содержит асинхронный двигатель 1 с коротко- замкнутым ротором, с трехфазной силовой 2 и двумя измерительными обмотками 3, 4 на статоре соответственно, преобразователь частоты 5, подключенный выходами к указанной трехфазной силовой обмотке 2, блок управления 6 преобразователем частоты 5 с двумя входами, подключенными к соответствующим выходам блока регуляторов 7, формирователь 8 сигнала обратной связи по частоте вращения с двумя входами, подключенными к первым выводам измерительных обмоток 3, 4, вторые выводы которых объединены и подключены к нулевой шине, и генератор высокой частоты 9. При этом первый вход блока регуляторов 7 подключен к выходу задатчика частоты вращения 10, а второй вход - к выходу формирователя 8 сигнала обратной связи по частоте вращения.
В электропривод переменного тока введена обмотка возбуждения 11, расположенная на статоре и подключенная выводами к выходам генератора высокой частоты 9.
Каждся из измерительных обмоток 3, 4, 11 может быть выполнена в виде последовательно соединенных идентичных элементарных катушек 12, 13, 14, расположенных на статоре. При этом на каждом зубце статора может быть расположено по одной эле- ментарной катушке из каждой измерительной обмотки 3, 4, 11.
Направление включения каждой элементарной катушки измерительных обмоток на конкретном зубце статора относительно соответствующей элементарной катушки на условно выбранном нулевом зубце статора определяется углом между осями этих зубцов и направлением
включения элементарных катушек высокочастотного возбуждения на них.
При согласном включении элементарных катушек высокочастотного возбуждения на нулевом и любом другом зубце статора соответствующие элементарные катушки измерительных обмоток включены согласно, если для первой измерительной обмотки положителен синус, а для второй косинус аргумента, равного произведению угла между осями этих зубцов на число зубцов ротора и встречно, если синус или косинус отрицателен, при встречном включении элементарных катушек высокочастотного
возбуждения направление включения элементарных катушек измерительных обмоток протвоположно вышеописанному.
Электропривод переменного тока работает следующим образом.
Сигнал задания од частоты вращения с выхода задатчика 10 поступает на первый вход блока регуляторов 7, на второй вход которого подается сигнал обратной связи ш с выхода формирователя 8. По результатам
сравнения этих сигналов формируются сигналы задания величины I и частоты тока статора, поступающие на соответствующие входы блока управления 6 преобразователем частоты 5.
Преобразователь частоты 5 питает трехфазным током силовые обмотки 2 асинхронного двигателя 1..
Из выходного напряжения каждой измерительной обмотки 3, 4 в формирователе
8 выделяется и демодулируется высокочастотный сигнал, обусловленный индуктивной связью указанной обмотки с обмоткой высокочастотного возбуждения 11.
Направление включения каждой элементарной катушки измерительных обмоток 3,4 выбрано так, что модуляция зубцами ротора формирует огибающую высокочастотного сигнала, причем на обмотке 3 по закону синуса, а на обмотке 4 - по закону
косинуса угла поворота ротора двигателя.
В формирователе 8 полученные синусная и косинусная составляющие дифференцируются, а полученные результаты попарно умножаются на соответствующие
гармонические функции угла поворота и складываются. В результате аналогично известному решению - прототипу формируется сигнал, пропорциональный текущей частоте вращения, который используется в
5 цепи обратной связи.
Высокочастотный сигнал на измерительных обмотках 3, 4 представляет собой сумму высокочастотных напряжений на элементарных катушках:
м -1
Ul Ј Olm . (1) т -о
. М -1
U2 2 U2m , (2)
m - о
t
где Ui - высокочастотное напряжение на первой измерительной обмотке;
Oz - высокочастотное напряжение на второй измерительной обмотке;
m - номер зубца статора;
М - число зубцов статора;
dim - напряжение на элементарной катушке первой измерительной обмотки зубца т;
02т напряжение на элементарной катушке второй измерительной обмотки зубца т.
Три элементарные катушки на каждом зубце статора можно представить как высокочастотный трансформатор (см. фиг. 2), первичной обмоткой которого является элементарная катушка 12 обмотки высокочастотного возбуждения, а вторичными - элементарные катушки 13, 14 измерительных обмоток. Индуктивная связь между обмотками зависит от взаимного расположения этого зубца статора и зубцов ротора, поэтому выходное высокочастотное напряжение элементарных катушек измерительных обмоток имеет следующий вид:
Uim-KimVym(or)L)0 (3) Cl2m-K2mWm(a)Oo, (4)
где Kim, K2m ±1 - коэффициент, учитывающий направление включения элементарных катушек на данном зубце статора по отношению к катушке на нулевом зубце статора;
Оо - напряжение на обмотке высокочастотного возбуждения;
vVm( о) - передаточная функция высокочастотного трансформатора на зубце т;
а- угол поворота ротора.
Очевидно, что передаточная функция Wm( of) является периодической и имеет период полного оборота ротора 2п рад. Если все зубцы статора и элементарные катушки на них идентичны, то для каждого зубца относительно условно выбранного (нулевого зубца) передаточная функция будет отличаться только сдвигом фазы
WmfoJ-ffa + fln) (5)
где f( о) - зависимость огибающей от угла поворота ротора на нулевом зубце; 2л
Дп
М
т- фазовый сдвиг на зубце т.
Если все зубцы ротора идентичны, то функциональная зависимость (5) имеет период
Wm(o) ( а+Дп) (6)
где N - число зубцов ротора, и может быть разложена в ряд Фурье по аргументу Na
2Т/Н
f() --Ј a. Sir К (N2 1п,) JV)
к о i/ f
;
где Зк - амплитуда гармоники R. фаза гармоники К, Выходные напряжения измерительных обмоток с учетом всех приведенных соотношений принимают следующий вид:
- °°г2frW 1
e; t« N- тг & у, (iv.f,) BJ
Если рассматривать коэффициенты включения Kim и fom как функцию дискретного аргумента углового положения зубца т, то на периоде М эти функции можно разложить в дискретный ряд Фурье
к.(.
Mirt
где
К о
и-
2ft H
О С Ч И
K si K-rr-m;,
IX Ч
(Ю) (11)
in
Ј- со()
0 2т--%. Ј2«со5 к Г- 1
s°.(W
, tfH ,. ,
. . К2т8юГк-й-),Н
М-1
Ј И °2к - ТГ Јcos ()(15)
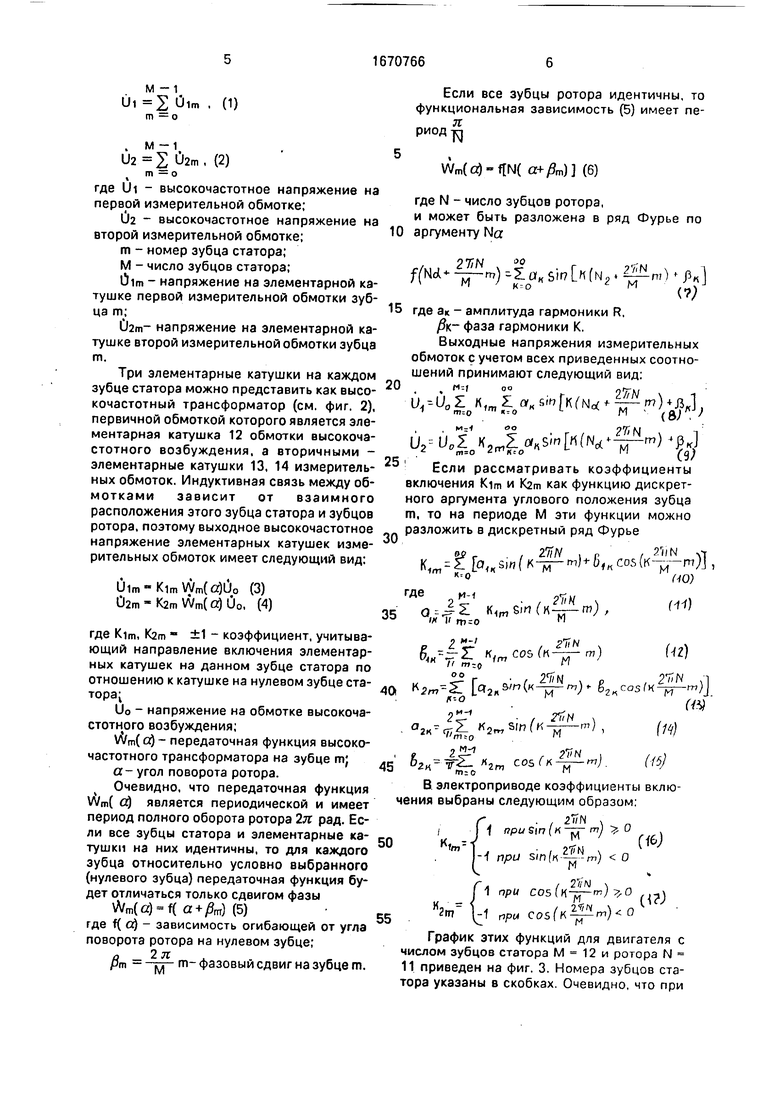
В электроприводе коэффициенты включения выбраны следующим образом:
«ь,- , , npuSin(-jj- ™) °
|--f при s mlK- m) О
(ft)
г., 27/М п
I 1 при C05(K-jCp V ° ,)
r,p« COS()O
График этих функций для двигателя с числом зубцов статора М 12 и ротора N 11 приведен на фиг. 3. Номера зубцов статора указаны в скобках. Очевидно, что при
зависимости (16) и (17) в разложении (10) и (13) при четном М имеем, что
Ьис-аак-О,f
0 при четных К;(18)
аис-Ь2К-Ьк А
--TV- при нечетных К; (19) - л |
Тогда выражения (10), (13) принимают следующий вид:
К,и 2 ((20
к. о
оо
гГ g«-5 ( СИ)
2т-{- к Н-а
где Ьк - амплитуда гармоники К дискретного
разложения, п . , 21JN
.
21 К2т COS( т
ITtc Q
-й- ).(«)
С учетом соотношений (19)...(21) выходные напряжения измерительных обмоток имеют следующий вид:
UrUaT.aKbnsm(Nt+flK) (К)
КтО
оо
ii2-uoЈ ««WKN + J) (24)
KzO
Как видно из последних соотношений при выбранном порядке включения элементарных катушек в измерительных обмотках, огибающая высокочастотного напряжения на первой измерительной обмотке получается пропорциональна синусу угла поворота ротора (23), а на второй - косинусу (24).
Гармонический состав огибающих сигналов значительно улучшается по сравнению с сосредоточенной обмоткой на одном зубце (элементарной катушкой), параметры которой приблизительно соответствуют параметрам дополнительных обмоток в прототипе, во-первых, потому, что исключаются, четные гармоники (18), а во-вторых, уменьшается процентное отношение высших нечетных гармоник, так как амплитуда каждой гармоники огибающей определяется произведением амплитуд соответствующих гармоник в разложении в ряд Фурье огибающей высокочастотного напряжения на элементарного катушке (7) и коэффициента включения (19), а последняя зависит обратно пропорционально от номера гармоники.
Вследствие этого, выходные сигналы измерительных обмоток практически не зависят от формы элементарных катушек, а
только от их идентичности. Нестабильность
частоты возбуждения в электроприводетак же не влияет на выходные сигналы измерительных обмоток, так как по отношению к обмотке высокочастотного возбуждения они работают в трансформаторном режиме. Таким образом, введение в электропривод переменного тока обмотки возбужде0 ния, расположенной на статоре и подключенной выводами к выходам генератора высокой частоты, а также выполнение всех измерительных обмоток в виде после- довательно соединенных катушек на зубцах
5 статора с определенным порядком включения обеспечивает повышение точности фор- мирования сигнала обратной связи по частоте вращения и электропривода в целом по сравнений с известным решением.
0 Формула изобретения
0 частоте вращения, отличающийся тем, что, с целью увеличения точности и диапазона регулирования частоты вращения, в него введена обмотка возбуждения, расположенная на статоре и подключенная выво5 дами к выходам генератора высокой частоты.
5 расположено по одной элементарной катушке из каждой измерительной обмотки.
и
1Ш1
(0)(11)(10) (9) (8) (1)
-/
+ 1 - т-Т
гян.
НЯ М
т
(6) (5) (4) (i) (1) (П
J-LLLLj
