(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроусилитель | 1989 |
|
SU1679065A1 |
| Гидроусилитель | 1989 |
|
SU1687922A1 |
| Гидроусилитель | 1986 |
|
SU1379503A1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Гидравлическая система комбайна | 1989 |
|
SU1667692A2 |
| Гидравлическая система комбайна | 1988 |
|
SU1561879A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
Изобретение относится к гидроавтоматике и может быть использовано в электрогидравлических следящих системах. Целью изобретения является повышение надежности и упрощение конструкции. При подаче электрического сигнала на электрогидравлический преобразователь 37 заслонка 36 отклоняется, прикрывая одно из сопел 34, 35. Золотник 2 смещается из нейтрального положения до тех пор, пока сумма гидродинамической силы и гидростатической силы, определяемой перепадом давления в полостях 22, 23, т.е. открытием дросселей 24, 25 и расточек 16, 17, сравняется с усилием, передаваемым рычагом 3. При воздействии внешней нагрузки на шток 38 гидроцилиндра 1 расход через окно 6 (7) уменьшится, одновременно уменьшится перепад на дросселе 24 (25) и на открытом проходном сечении расточки 17. Золотник 2 сместится в новое положение равновесия, обеспечивая расход на гидроцилиндре 1, пропорциональный сигналу на электромеханическом преобразователе 37. 2 ил.
Изобретение относится к гидроавтоматике и может быть использовано в электрогидравлических следящих системах
Целью изобретения является повышение надежности и упрощение конструкции.
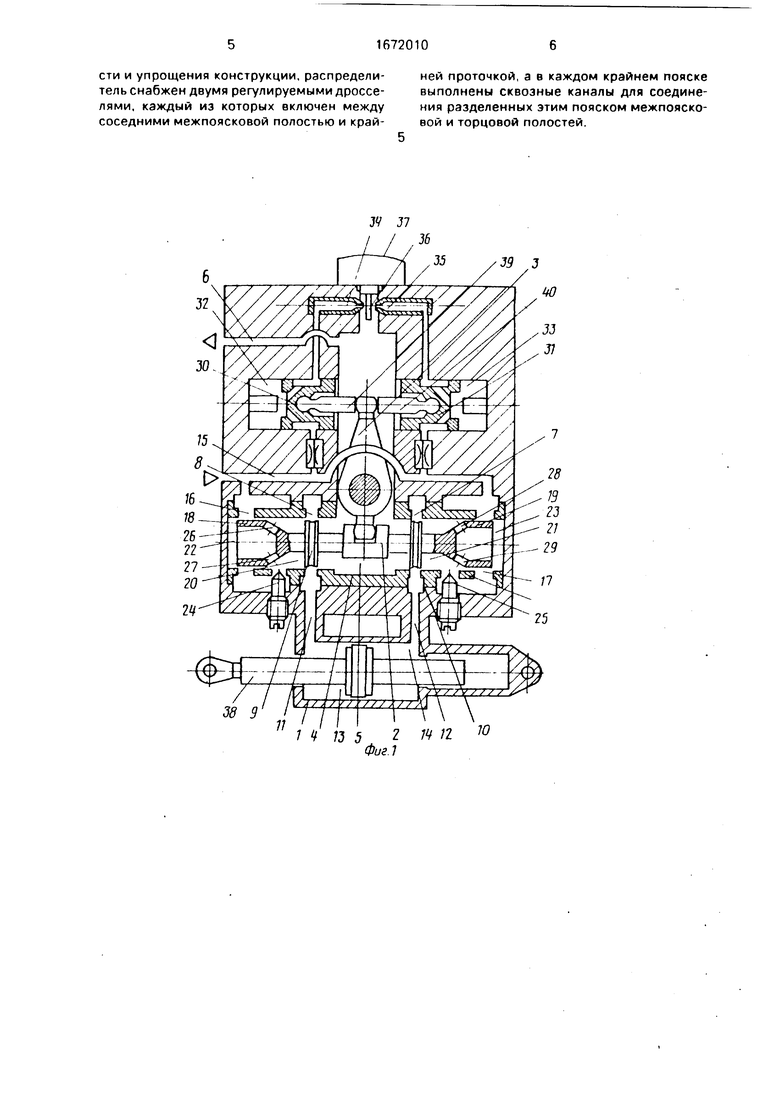
На фиг. 1 изображена конструктивная схема гидравлического привода, на фиг. 2 даны кривые зависимостей гидродинамической силы и гидростатической силы от перемещения золотника.
Привод содержит исполнительный гидроцилиндр 1 и распределитель с четырех- кромочным золотником 2, соединенным с двуплечим рычагом 3 управления и размещенным в гильзе 4, центральная расточка 5 которой соединена каналом 6 со сливом, рабочие окна 7, 8, взаимодействующие со средними поясками 9,10, подключены каналами 11, 12 к рабочим полостям 13, 14 гидроцилиндра 1, а соединенные каналом 15 с
насосом (не изображен) крайние расточки 16, 17 взаимодействуют с крайними поясками 18, 19, образующими со средними поясками 9, 10 межпоясковые полости 20, 21, а с гильзой 4 - торцовые пилости 22, 23. Регулируемые дроссели 24, 25 включены между полостями 20, 21 и расточками 16, 17 соответственно, в поясках 18, 19 выполнены сквозные каналы 26, 27 и 28, 29 для соединения разделенных поясками 18, 19 полостей 20, 22 и 21, 23 соответственно.
Рычаг 3 связан с плунжерами 30, 31, приводные камеры 32, 33 которых соединены с соплами 34, 35, разделенными заслонкой36,соединеннойс электромеханическим преобразователем 37. Шток 38 гидроцилиндра 1 воспринимает внешнюю нагрузку. Плунжеры 30, 31 связаны с рычагом 3 толкателями 39, 40.
О х| Ю О
о
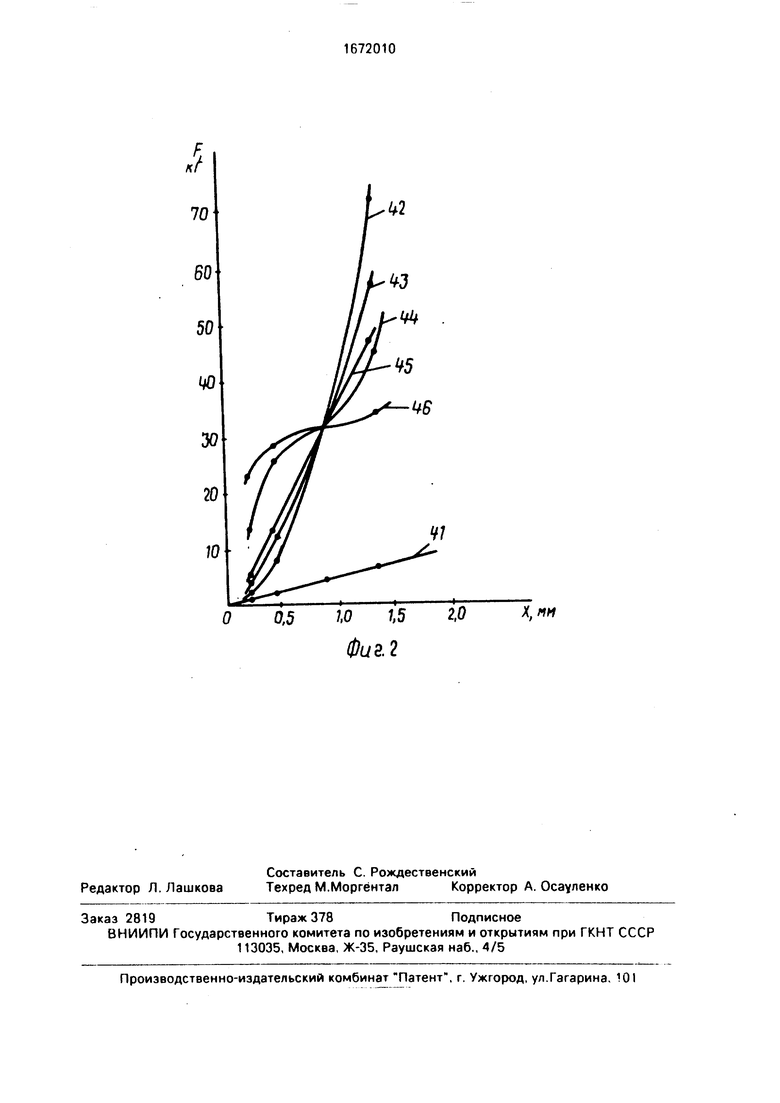
На фиг. 2 кривая 41 показывает зависимость гидродинамической силы от перемещения X золотника 2, кривая 42 - зависимость гидростатической силы от перемещения золотника 2 при перекрытых поясками 18, 19 расточках 16, 17, кривые 43, 44, 45, 46 - зависимости гидростатической силы от перемещения золотника 2 при открытой расточке 17 и коэффициентах использования периметра гильзы 4, равных 0,15, 0,3, 0,4. 0,2 соответственно.
Гидравлический привод работает следующим образом.
При подаче электрического сигнала на электромеханический преобразователь 37 он отклоняет заслонку 36, например, влево, уменьшая расход рабочей жидкости через сопло 34. На плунжерах 30. 31 возникает перепад давления, пропорциональный электрическому сигналу на электромеханический преобразователь 37. Плунжер 30 смещается вправо, поворачивая через толкатель 39 рычаг 3 по часовой стрелке и смещая тем самым золотник 2 влево. Шток 38 гидроцилиндра 1 начнет выдвигаться. При смещении золотника 2 влево на него начинает действовать гидродинамическая сила, стремящаяся вернуть его в нейтральное положение. Зависимость (кривая 41) гидродинамической силы от смещения X золотника 2 диаметром d 9 мм, при расходе через золотник Q 45 л/мин, смещении золотника 2 из. нейтрального положения X 0,9 мм, перепаде давления рабочей жидкости 200 кг/см2, линейна. Кроме того, при смещении золотника 2 влево давление нагнетания рабочей жидкости попадает из канала 15 через расточку 17, регулируемый дроссель 25, окно 7, канал 12 в рабочую полость 14 гидроцилиндра 1. При прохождении потока рабочей жидкости через параллельно включенные регулируемый дроссель 25 и щель между расточкой 17 и пояском 19 на них происходит падение давления ЛР, определяемое из соотношения
- (У-Р
ДР
2/z2 -А|р
где Q - расход рабочей жидкости, м3/с;
р- плотность рабочей жидкости, кг/м ;
Адр суммарная площадь поперечного сечения регулируемого дросселя 25 и дросселирующей щели расточки 17, м2:
ц - коэффициент расхода.
При этом в торцовых полостях 22, 23 золотника 2 появится перепад давления ДР и значит на золотник 2 действует гидростатическая сила R, направленная, как и гидродинамическая сила, в сторону,
противоположную смещению (в данном случае вправо).
R ЛР Азол,
п
где Азол - площадь торца золотника 2, м .
Сила R и гидродинамическая сила суммируются и образуют усилие гидравлической пружины, стремящейся вернуть золотник 2 в нейтральное положение. Золотник 2, смещаясь влево, остановится, когда сумма гидростатической силы и гидродинамической силы, т.е. усилие обратной связи по расходу, сравняется с силой, передаваемой рычагом 3. При этом расход через гидроцилиндр 1, а значит и скорость
5 штока 38 привода, пропорциональны смещению распределительного золотника 2 и величине электрического сигнала на электромеханический преобразователь 37. При действии внешней нагрузки на шток 38 гид0 роцилиндра 1, например в правую сторону, расход через окно 7 уменьшится, уменьшится также перепад давления на дросселе 25 и расточке 17. Изменится положение равновесия золотника 2. Он будет продолжать
5 смещаться влево до тех пор, пока не наступит равновесие сил, действующих на золотник 2, и расход будет определяться электрическим сигналом на электромеханический преобразователь 37. При действии
0 внешней нагрузки на шток 38 в левую сторону положение равновесия золотника 2 наступит при меньшем его смещении из нейтрального положения и расход будет определяться электрическим сигналом на
5 электромеханический преобразователь 37.
При изменении давления нагнетания
насоса положение равновесия золотника 2
также изменится, обеспечив расход через
гидроцилиндр 1, определяемый электриче0 ским сигналом на электромеханический преобразователь 37. Аналогично работа привода происходит при изменении электрического сигнала на электромеханический преобразователь 37, приводящем к смеще5 нию золотника 2 вправо.
Формула изобретения Гидравлический привод, содержащий исполнительный гидроцилиндр и распределитель с четырехкромочным золотником, со0 единенным с рычагом управления и размещенным в гильзе, центральная расточка которой связана со сливом, рабочие окна, взаимодействующие со средними поясками, подключены к рабочим полостям
5 гидроцилиндра, а соединенные с насосом крайние расточки взаимодействуют с крайними поясками, образующими со средними поясками межпоясковые полости, а с гильзой - торцовые полости, отличающий- с я тем. что, с целью повышения надежности и упрощения конструкции, распределитель снабжен двумя регулируемыми дросселями, каждый из которых включен между соседними межпоясковой полостью и край32
гч7 -/-F4/ъ,Ш
77 J I
74/35 2 14 И ю Фиг 7
ней проточкой, а в каждом крайнем пояске выполнены сквозные каналы для соединения разделенных этим пояском межпоясковой и торцовой полостей.
39 3
Ю
О 0,5 W 1,5 2,0
Фиг.2
М
Х,МН
| Гидрораспределитель | 1980 |
|
SU893143A3 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
