(Л
С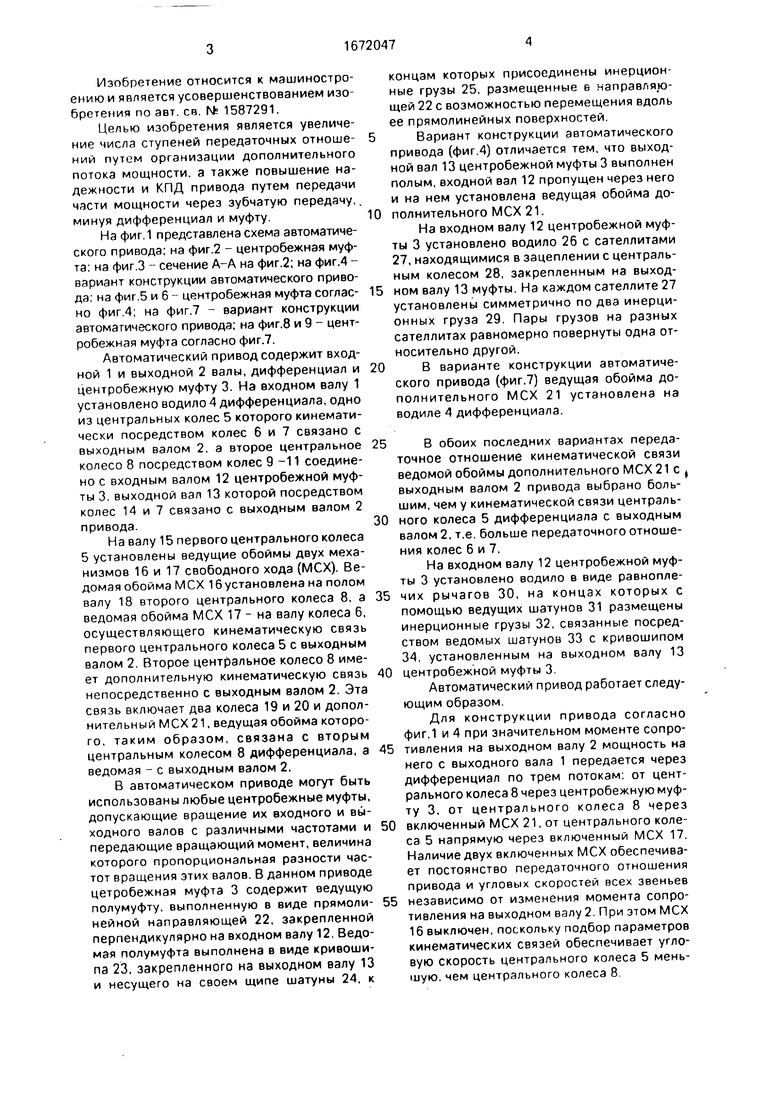
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая передача Б.Кочеткова | 1989 |
|
SU1709152A1 |
| АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2029185C1 |
| Автоматическая передача Б.Ф.Кочеткова | 1989 |
|
SU1672046A1 |
| Автоматическая передача Б.Ф.Кочеткова | 1990 |
|
SU1803662A1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2020336C1 |
| Автоматическая передача Б.Ф.Кочеткова | 1990 |
|
SU1803663A1 |
| Автоматическая передача Б.Ф.Кочеткова | 1990 |
|
SU1768843A1 |
| АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2044201C1 |
| Автоматическая передача Кочеткова Б.Ф. | 1991 |
|
SU1825926A1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР Б.Ф.КОЧЕТКОВА | 1993 |
|
RU2047026C1 |
Изобретение относится к машиностроению. Целью изобретения является увеличение числа ступеней передаточных отношений путем организации дополнительного потока мощности, а также повышение надежности и КПД привода путем передачи части мощности через зубчатую передачу, минуя дифференциал и центробежную муфту. Для этого привод снабжен дополнительным механизмом свободного хода (МСХ 21), ведущая обойма которого кинематически связана с одним из элементов дифференциала, а ведомая - с выходным валом 2, мощность на последний при больших нагрузках передается по трем потокам: два по зубчатым передачам 6 - 7 и 19 - 20 и один через центробежную муфту 3, а при снижении нагрузки из-за автоматического срабатывания МСХ-21 - только по двум потокам. 3 з.п. ф-лы, 9 ил.
158
Фиг Л
о VJ ю о
4 vj
to
Изобретение относится к машиностроению и является усовершенствованием изобретения по авт. св. N; 1587291.
Целью изобретения является увеличение числа ступеней передаточных отношений путем организации дополнительного потока мощности, а также повышение надежности и КПД привода путем передачи части мощности через зубчатую передачу, минуя дифференциал и муфту.
На фиг.1 представлена схема автоматического привода; на фиг.2 - центробежная муфта: на фиг.З - сечение А-А на фиг.2; на фиг.4 - вариант конструкции автоматического привода; на фиг.5 и 6 - центробежная муфта согласно фиг.4; на фиг.7 - вариант конструкции автомагического привода; на фиг.8 и 9 - центробежная муфта согласно фиг.7.
Автоматический привод содержит входной 1 и выходной 2 валы, дифференциал и центробежную муфту 3. На входном валу 1 установлено водило 4 дифференциала, одно из центральных колес 5 которого кинематически посредством колес 6 и 7 связано с выходным валом 2, а второе центральное колесо 8 посредством колес 9-11 соединено с входным валом 12 центробежной муфты 3, выходной вал 13 которой посредством колес 14 и 7 связано с выходным валом 2 привода.
На валу 15 первого центрального колеса 5 установлены ведущие обоймы двух механизмов 16 и 17 свободного хода (МСХ). Ведомая обойма МСХ 16установлена на полом валу 18 второго центрального колеса 8, а ведомая обойма МСХ 17 - на валу колеса 6, осуществляющего кинематическую связь первого центрального колеса 5 с выходным валом 2. Второе центральное колесо 8 имеет дополнительную кинематическую связь непосредственно с выходным взлом 2. Эта связь включает два колеса 19 и 20 и дополнительный МСХ 21, ведущая обойма которого, таким образом, связана с вторым центральным колесом 8 дифференциала, а ведомая - с выходным валом 2.
В автоматическом приводе могут быть использованы любые центробежные муфты, допускающие вращение их входного и выходного валов с различными частотами и передающие вращающий момент, величина которого пропорциональная разности частот вращения этих валов. В данном приводе цетробежная муфта 3 содержит ведущую полумуфту, выполненную в виде прямолинейной направляющей 22, закрепленной перпендикулярно на входном валу 12. Ведомая полумуфта выполнена в виде кривошипа 23, закрепленного на выходном валу 13 и несущего на своем щипе шатуны 24, к
концам которых присоединены инерционные грузы 25, размещенные в направляющей 22 с возможностью перемещения вдоль ее прямолинейных поверхностей.
Вариант конструкции автоматического
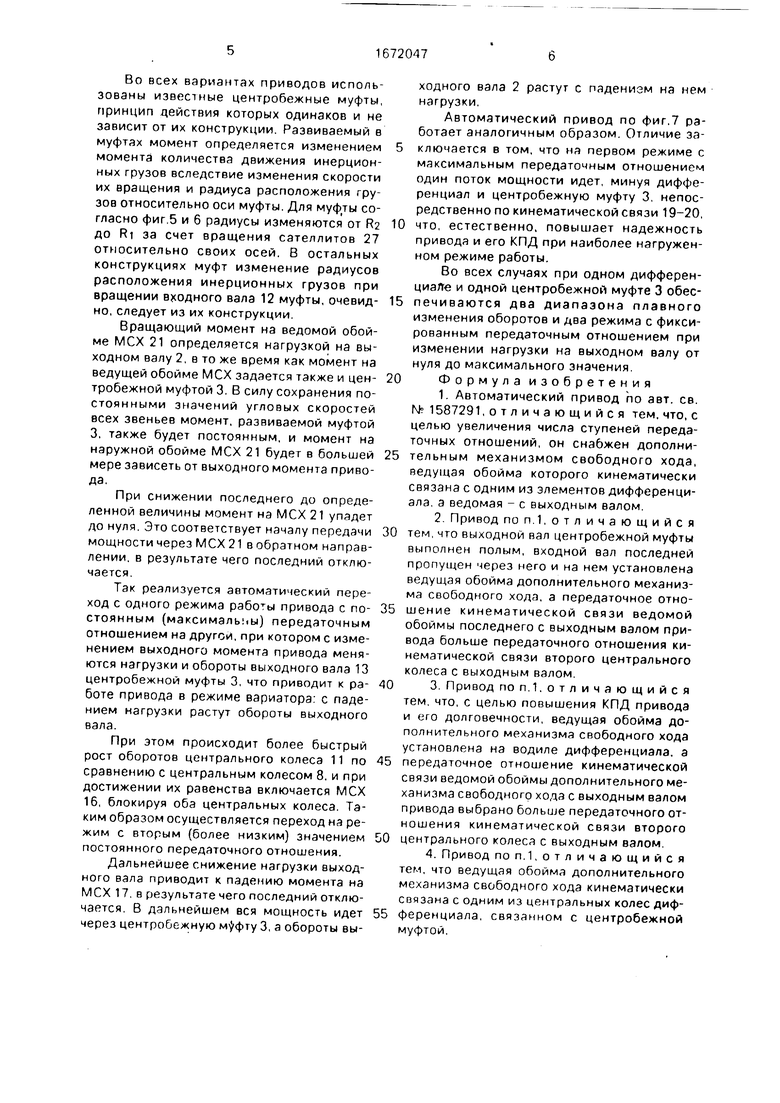
привода (фиг.4) отличается тем, что выходной вал 13 центробежной муфты 3 выполнен полым, входной вал 12 пропущен через него и на нем установлена ведущая обойма дополнительного МСХ 21.
На входном валу 12 центробежной муфты 3 установлено водило 26 с сателлитами 27, находящимися в зацеплении с центральным колесом 28, закрепленным на выходном валу 13 муфты. На каждом сателлите 27 установлены симметрично по два инерционных груза 29. Пары грузов на разных сателлитах равномерно повернуты одна относительно другой.
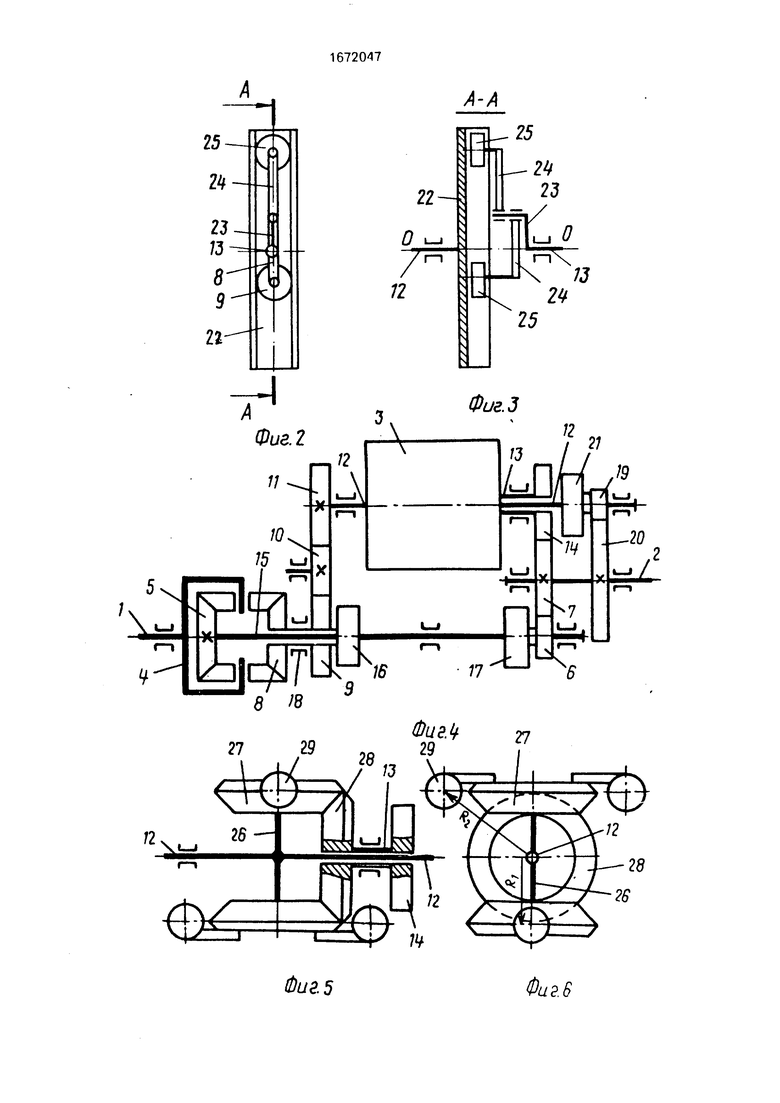
В варианте конструкции автоматического привода (фиг.7) ведущая обойма дополнительного МСХ 21 установлена на водиле 4 дифференциала.
В обоих последних вариантах передаточное отношение кинематической связи ведомой обоймы дополнительного МСХ 21 с выходным валом 2 привода выбрано большим, чем у кинематической связи центрального колеса 5 дифференциала с выходным валом 2, т.е. больше передаточного отношения колес 6 и 7.
На входном валу 12 центробежной муфты 3 установлено водило в виде равноплечих рычагов 30, на концах которых с помощью ведущих шатунов 31 размещены инерционные грузы 32, связанные посредством ведомых шатунов 33 с кривошипом 34, установленным на выходном валу 13
центробежной муфты 3.
Автоматический привод работает следующим образом.
Для конструкции привода согласно фиг.1 и 4 при значительном моменте сопротивления на выходном валу 2 мощность на него с выходного вала 1 передается через дифференциал по трем потокам; от центрального колеса 8 через центробежную муфту 3, от центрального колеса 8 через
включенный МСХ 21, от центрального колеса 5 напрямую через включенный МСХ 17. Наличие двух включенных МСХ обеспечивает постоянство передаточного отношения привода и угловых скоростей всех звеньев
независимо от изменения момента сопротивления на выходном валу 2. При этом МСХ 16 выключен, поскольку подбор параметров кинематических связей обеспечивает угловую скорость центрального колеса 5 меньшую, чем центрального колеса 8.
Во всех вариантах приводов использованы известные центробежные муфты, принцип действия которых одинаков и не зависит от их конструкции. Развиваемый в муфтах момент определяется изменением момента количества движения инерционных грузов вследствие изменения скорости их вращения и радиуса расположения грузов относительно оси муфты. Для муфты согласно фиг,5 и 6 радиусы изменяются от Рг до RI за счет вращения сателлитов 27 относительно своих осей. В остальных конструкциях муфт изменение радиусов расположения инерционных грузов при вращении входного вала 12 муфты, очевидно, следует из их конструкции.
Вращающий момент на ведомой обойме МСХ 21 определяется нагрузкой на выходном валу 2, в то же время как момент на ведущей обойме МСХ задается также и центробежной муфтой 3. В силу сохранения постоянными значений угловых скоростей всех звеньев момент, развиваемой муфтой 3, также будет постоянным, и момент на наружной обойме МСХ 21 будет в большей мере зависеть от выходного момента привода.
При снижении последнего до определенной величины момент на МСХ 21 упадет до нуля. Это соответствует началу передачи мощности через МСХ 21 в обратном направлении, в результате чего последний отключается.
Так реализуется автоматический переход с одного режима работы привода с постоянным (максимальны) передаточным отношением на другой, при котором с изменением выходного момента привода меняются нагрузки и обороты выходного вала 13 центробежной муфты 3, что приводит к работе привода в режиме вариатора: с падением нагрузки растут обороты выходного вала.
При этом происходит более быстрый рост оборотов центрального колеса 11 по сравнению с центральным колесом 8, и при достижении их равенства включается МСХ 16, блокируя оба центральных колеса. Таким образом осуществляется переход на режим с вторым (более низким) значением постоянного передаточного отношения.
Дальнейшее снижение нагрузки выходного вала приводит к падению момента на МСХ 17, в результате чего последний отключается. В дальнейшем вся мощность идет через центробежную 3, а обороты выходного вала 2 растут с падениэм на нем нагрузки.
Автоматический привод по фиг.7 работает аналогичным образом. Отличие за- 5 ключается в том, что на первом режиме с максимальным передаточным отношением один поток мощности идет, минуя дифференциал и центробежную муфту 3, непосредственно по кинематической связи 19-20,
0 что, естественно, повышает надежность привода и его КПД при наиболее нагруженном режиме работы.
Во всех случаях при одном дифференциале и одной центробежной муфте 3 обес5 печиваются два диапазона плавного изменения оборотов и два режима с фиксированным передаточным отношением при изменении нагрузки на выходном валу от нуля до максимального значения.
0Формула изобретения
выполнен полым, входной вал последней пропущен через него и на нем установлена ведущая обойма дополнительного механизма свободного хода, а передаточное отно5 шение кинематической связи ведомой обоймы последнего с выходным валом привода больше передаточного отношения кинематической связи второго центрального колеса с выходным валом.
тем, что, с целью повышения КПД привода и его долговечности, ведущая обойма дополнительного механизма свободного хода установлена на водиле дифференциала, а
5 передаточное отношение кинематической связи ведомой обоймы дополнительного механизма свободного хода с выходным валом привода выбрано больше передаточного отношения кинематической связи второго
0 центрального колеса с выходным валом.
зг
81
/7бг
и Ь гпф
9,
«
IBB
Г
L
Ы,
6/
иII
К
Ј1
Ј Мф
к и
QI 9 .
LbQZLQl
Vj
t 8 21 Ю . .u
)п, FRT-n
79
33
X I I
Г 78 9 Я rj n
/5
2 20
Фие.7
27
Ф.
| Автоматически привод Б.Ф.Кочеткова | 1988 |
|
SU1587291A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
