Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ТОЧЕЧНЫХ ОБЪЕКТОВ | 1989 |
|
SU1623537A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТОВ ПО ИХ ИЗОБРАЖЕНИЯМ ПРЕИМУЩЕСТВЕННО В КОСМОСЕ | 2014 |
|
RU2568335C1 |
| Устройство для измерения координатных искажений фокусирующе-отклоняющей системы и передающей электронно-лучевой трубки | 1989 |
|
SU1660212A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И ЛИНЕЙНЫХ РАЗМЕРОВ ОБЪЕКТОВ ПО ИХ ТЕЛЕВИЗИОННЫМ ИЗОБРАЖЕНИЯМ | 2008 |
|
RU2381521C2 |
| СПОСОБ ПОЛУЧЕНИЯ ВИДИМОГО ИЗОБРАЖЕНИЯ ПРИ СКАНИРОВАНИИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ КОРПУСА ЯДЕРНОГО РЕАКТОРА И ПЕРЕДАЮЩАЯ ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2116702C1 |
| Телевизионное устройство со следящим стробированием изображения объекта | 1976 |
|
SU640453A1 |
| СПОСОБ КОМПЕНСАЦИИ ДВИЖЕНИЯ В ЦИФРОВЫХ ДИНАМИЧЕСКИХ ВИДЕОИЗОБРАЖЕНИЯХ | 2013 |
|
RU2552139C1 |
| Устройство для хранения координатной телевизионной информации | 1978 |
|
SU995374A1 |
| Устройство для измерения координат объекта | 1990 |
|
SU1737754A1 |
| Телевизионная система для измерения координат объектов | 1983 |
|
SU1107341A1 |
Изобретение относится к телевидению и может быть использовано для высокоточного определения координат изобретений подвижных объектов. Цель изобретения - повышение точности измерения координат подвижного объекта при наличии скоростного смаза. Измерение координат производится путем измерения скорости движения объекта по видеоинформации одного телевизионного кадра и экстрополяции положения объекта на упреждаемый момент времени, при этом для измерения скорости малоразмерного объекьа вычисляется длина скоростного смаза изображения. Для этого осуществляется измерение проекций и сечений изображения объекта по двум парам ортогональных направлений. Измерение мгновенной скорости по длине смаза позволяет получить дополнительную информацию, которая после соответствующей обработки является корректирующим параметром, обеспечивающим повышение точности измерения координат в 1,5 раза. 1 ил.
Изобретение относится к телевидению и может быть использовано для высокоточного определения координат изображений подвижных объектов.
Цель избретения - повышение точности измерения координат подвижного объекта при наличии скоростного смаза.
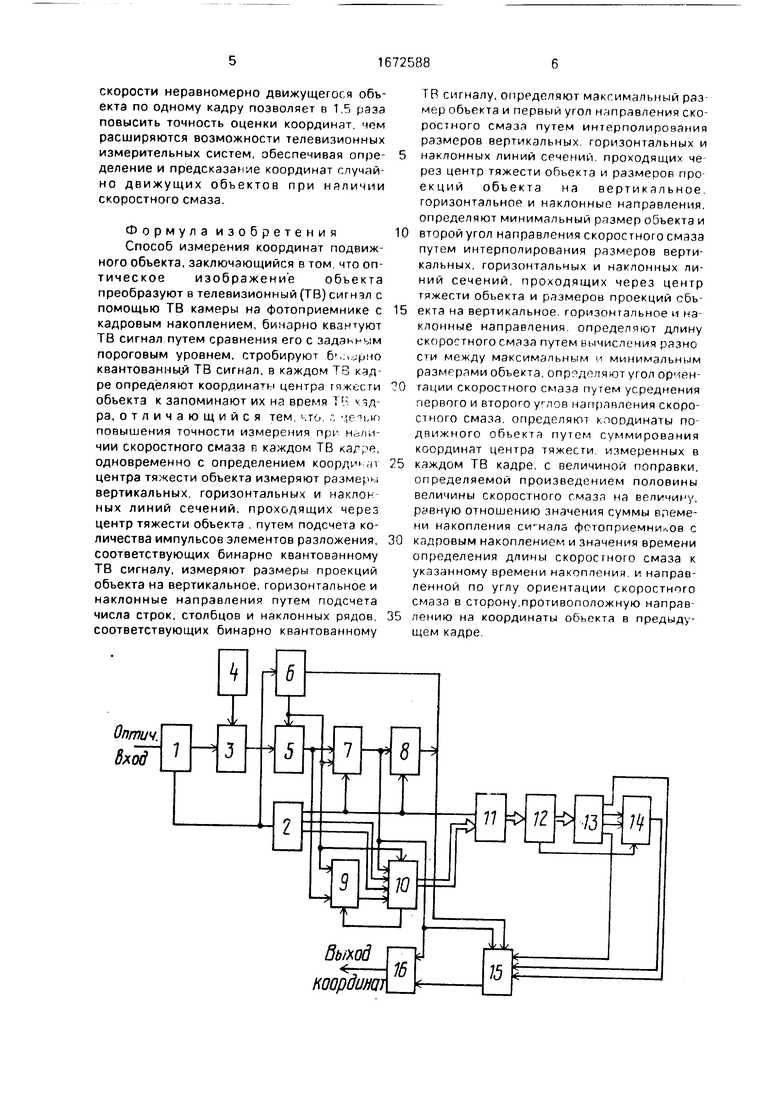
На чертеже представлена структурная электрическая схема устройства, реализующего способ измерения координат подвижного объекта.
Устройство содержит телевизионную (ТВ) камеру 1, синхрогеиератор 2, компаратор 3, блок 4 формирования опорного сигна- ла. блок 5 стробирования, блок 6 формирования строба, блок 7 измерения центра тяжести, блок 8 памяти, блок 9 памяти стробированного изображения, блок 10 коммутации и адресации, блок 11 измерения сечений и проекций, блок 12 выбора интервала, блок 13 измерения размеров объекта, блок 14 оценки направления движения и блок 15 экстраполяции и сумматор 16.
Способ измерения координат подвижного объекта основан на измерении скорости движения объекта по видеоинформации одного телевизионного кадра и экстраполяции положения объекта на упреждаемый момент времени, причем для измерения скорости малоразмерного симметричного объекта вычисляется длина скоростного смаза изображения, возникающего в телекамерах с кадровым накоплением (например, в камерах с прибором с зарядовой связью), для чего осуществляется измерение проекций и сечений изображения объекта по двум парам ортогональных
О VJ fO СЛ СО 00
направлений. Измерение мгновенной скорости объекта по длине смаза позволяет получить дополнительную информацию, обеспечивающую уменьшение ошибок экстраполяции положения объекта за счет не- зависимости измерений положения объекта и изменяющейся скорости движения объекта, имеющей место, например, при работе телевизионных гидов в астрономии. В результате способ включает дополнительные операции: производят подсчет количества импульсов от элементов разложения, соответствующих сигналу объекта в различных направлениях по строкам,столбцам и диагоналям для измерения размеров сечений объекта, подсчитывают количество импульсов от элементов разложения, соответствующих числу строк, столбцов и наклонных рядов для измерения размеров проекций от объекта, по найденным четырем сечениям проводят вычисление минимального размера объекта и соответствующего ему угла, который ортогонален направлению скоростного смаза, по найденным четырем проекциям объекта производится вычисление его максимального размера и соответствующего ему угла, который определяет направление скоростного смаза, по разности оценок максимальных и минимальных размеров объекта определяют модуль скоростного смаза, а по найденным углам - его направление, и добавляют скорректированную на отношение времени упреждения к времени кадра половину измеренного скоростного смаза к координате центра тяжести сигнала объекта в текущем кадре.
Устройство работает следующим образом.
На оптический вход ТВ камеры 1 проецируется изображение подвижного объек- та. С выхода ТВ камеры 1, синхронизируемой кадровыми, строчными и элементными импульсами, поступающими с выхода синхро- генератора 2, снимается сигнал, который поступает на вход компаратора 3, на вход опорного сигнала которого поступает сигнал от блока 4 формирования опорного сигнала. С выхода компаратора 3 получают бинарный сигнал, который поступает на вход блока 5 стробирования, на второй вход которого поступает разрешающий сигнал с блока б формирования строба. Стробиро- ванный сигнал с выхода блока 5 стробирования поступает на вход блока 7 измерения центра тяжести, в котором производится из- мерение координат центра тяжести, в котором производится измерение координат центра тяжести сигнала объекта. Сигнал координат через блок 8 памяти поступает на первый вход блока б формирования строба
на второй вход которого поступают синхроимпульсы от синхрогененератора 2. Сигнал стробируемого изображения с выхода блока 5 поступает на первый вход блока 9 памяти стробированного изображения, в котором запоминается на время, необходимое для вычисления параметров объекта (но не более времени кадра). На второй вход блока 9 памяти поступают сигналы с выхода блока
10коммутации и адресации, управляющие порядком многократного считывания сигналов в последовательности, обеспечивающей перебор направлений анализа изображения объекта. Число считываний изображений равно суммарному числу измеряемых сечений и проекций. С выхода блока 9 памяти через блок 10 коммутации и адресации сигнал поступает на вход блока
11измерения сечений и проекций, на второй вход которого поступает сигнал с выхода синхрогенератора 2. Сигналы, соответствующие кодам размеров четырех сечений и четырех проекций поступают на вход блока 12 выбора интервала. В нем выбирается одна из трех возможных комбинаций отрезков по три из четырех значений, в котором второе значение является максимальным или минимальным. Сигнал с выхода блока 12 выбора интервала поступает на вход блока 13 измерения размеров объекта, который методом интерполяции реализует расчет уточненных значений направления и величины экстремальных селений и проекций. Сигнал с выхода блока 13 измерения размеров объекта поступает на входы блока 14 оценки направления движения и блока 15 экстраполяции. На другие входы блока 15 экстраполяции поступают сигналы с выхода блока 14 оценки направления движения. В блоке 15 экстраполяции производится коррекция модуля смещения объекта, пропорциональная отношению суммарного времени вычисления в устройстве и накопления и считывания в приборе с зарядовой связью к времени кадра, а также исходя из положения центра тяжести объекта в предыдущем кадре, снимаемого с блока 8 памяти измеренных координат, уточняется направление движения объекта вдоль трека смаза. С выхода блока 15 экстраполяции сигнал поправки положения объекта поступает на сумматор 16, в котором складывается с сигналом центра тяжести объекта в текущем кадре, поступающем с блока 7 измерения центра тяжести. Выходной сигнал сумматора 16 соответствует уточненным координатам подвижного объекта и является выходным сигналом устройства.
Способ измерения координат подвижного объекта за счет измерения мгновенной
скорости неравномерно движущегося объекта по одному кадру позволяет в 1,5 раза повысить точность оценки координат, чем расширяются возможности телевизионных измерительных систем, обеспечивая опре- деление и предсказание координат спучяй- но движущих объектов при наличии скоростного смаза.
Формулаизобретения
Способ измерения координат подвижного объекта, заключающийся в том, что оп- тическое изображение объекта преобразуют в телевизионный (ТВ) сигнал с помощью ТВ камеры на фотоприемнике с кадровым накоплением, бинарно квантуют ТВ сигнал путем сравнения его с заданном пороговым уровнем, стробируют 6p..-,jpMO квантованный ТВ сигнал, в каждом ТЗ кадре определяют координаты центра гяжесги объекта к запоминают их на время TF чзд- ра, отличающийся тем, что г, ЧРТЬЮ повышения точности измерения прг Нс-.ли- чии скоростного смаза в каждом ТВ ка/ve, одновременно с определением коорд п центра тяжести объекта измеряют размера вертикальных, горизонтальных и наклон ных линий сечений, проходящих через центр тяжести объекта . путем подсчета количества импульсов элементов разложения, соответствующих бинарно квантованному ТВ сигналу, измеряют размеры проекций объекта нэ вертикальное,горизонтальное и наклонные направления путем подсчета числа строк, столбцов и наклонных рядов, соответствующих бинарно квантованному
0
5 0
5
0
5
ТВ сигналу, определяют максимальный размер объекта и первый угол направления скоростного смаза путем интерполирования размеров вертикальных горизонтальных- и наклонных линий сечений, проходящих через центр тяжести объекта и размеров про екций объекта на вертикальное, горизонтальное и наклонные направления, определяют минимальный размер объекта и второй угол направления скоростного смаза путем интерполирования размеров вертикальных, горизонтальных и наклонных линий сечений, проходящих через центр тяжести объекта и размеров проекций сбь- екта на вертикальное горизонтальное и наклонные направления определяют длину скоростного смаза путем вычисления разно сти между максимальным м минимальным размррами объекта, определяют угол ориентации скоростного смаза путем усреднения первого и второго углов направления скоростного смаза, определяют координаты подвижного объекта путем суммирования координат центра тяжести измеренных в каждом ТВ кадре, с величиной поправки, определяемой произведением половины величины скоростного смаза на величину, равную отношению значения суммы времени накопления сигнала фстоприемнигчов с кадровым накоплением и значения времени определения длины скоростного смаза к указанному времени накопления и направленной по углу ориентации скоростного смаза в сторону,противоположную направлению на координаты объекта в предыдущем кадре
| УЧЕБНЫЙ ПРИБОР ПО ФИЗИКЕ | 1999 |
|
RU2172026C2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
