входом блока управления, и третий блок сравнения, выход которого соединен с вторым входом формирователя сигналов управления, второй выход которого подключен к второму информационному входу первого коммутатора, выход которого является третьим выходом блока управления, а третий выход подключен к второму информационному входу второго коммутатора, выход которого является четвертым выходом блока управления, при этом второй вход второго блока сравнения объединен с первым входом формирователя стробирующих сигналов и является пятым входом блока управления, а второй вход первого блока сравнения объединен с вторыми входами третьего блока сравнения и формирователя стробирующих сигналов и является шестым входом блока управления.
3. Система по п. 1, о т л и чающаяся тем, что блок выделения сигналов точечного объекта содержит последовательно соединенные аналого-цифровой преобразователь, фильтр верхних пространственных частот, коммутатор, вычитатель и пороговый элемент, генератор импульсов, выход которого подключен к управляю тему входу коммутатора и к управляющему входу запоминающего устройства, информационный вход которого соедине со вторым выходом коммутатора, а выход - с вторым входом вычитателя, причем входом блока выделения сигналов точечного объекта является вход аналого-цифрового преобразователя, первым выходом - выход генератора им пульсов, а вторым выходом - выход порогового элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической коррекции координатных искажений растра | 1982 |
|
SU1059701A1 |
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |
| Устройство для формирования знаков на экране телевизионного приемника | 1982 |
|
SU1191934A2 |
| Способ обработки графической информации | 1987 |
|
SU1501111A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1339605A1 |
| Устройство для определения координат объекта | 1986 |
|
SU1354226A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Способ отображения графической информации и устройство для его осуществления | 1984 |
|
SU1327154A1 |
| Устройство для отображения графической информации | 1977 |
|
SU739593A1 |
| Устройство для отображения информации на экране телевизионного индикатора | 1980 |
|
SU955189A1 |
1. ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТОВ, содержащая телевизионную камеру, с одной стороны которой расположен пер1 вый блок подсвета, а также последовательно соединенные блок управления и вычислительный блок, выход которого является выходом системы, отличающаяся тем, что, с целью , повышения точности измерений координат объектов, введены блок выделения сигнала- точечного объекта, блок определения координат точечного объекта в растре, второй блок подсвета, расположенный с другой стороны телевизионной камеры, два коммутатора и блок выбора элемента, вход которого является входом системы, причем первый и второй входы блока управления подключены к соответствующим выходам блока определения координат точечного объекта в растре, вход которого объединен с третьим входом блока управления и подключен к первому выходу блока выделения сигнала точечного объекта, вход которого подключен к выходу телевизионной камеры, а второй выход - к первым входам первого и второго блоков подсвета, первый выход первого блока подсвета соединен со. вторым входом вычислительного блока и с первым информационным входом первого коммутатора, второй выход - с третьим входом вычислительного блока, второй и третий входы - соответственно с первым и вторым выходами второго коммутатора, третий и четвертый выходы которого подключены соответственно ко второму и третьему входам второго блока подсвета, первый выход которого соединен со вторым информационным входом первого коммутатора, а второй выход - с четвер-. тым входом вычислительного блока, четвертый вход блока управления подключен к выходу первого коммутатора, пятый и шестой входы - соответственно к первому и второму выходам блока выбора элемента, второй выход - к управляющим входам первого и второго коммутаторов, а третий и четвер- § тый выходы - соответсвенно к первому (Л и второму информационным входам второго коммутатора. 2. Система по п. 1, о т л ич а юН Щ а. я с я тем, что, блок управления содержит первый блок сравнения, первый вход которого является первым входом блока управления, выход подключен к первому входу элемента И, выход которого является первым выходом блока управления, и к первому информационному входу первого коммуоэ татора, второй блок сравнения, первый вход которого является вторым 4 входом блока управления, выход подключен ко второму входу элемента И и к первому информационному входу второго коммутатора, последовательно соединенные формирователь стробирующих сигналов, блок совпадения, другой вход которого является третьим входом блока управления, и формирователь сигналов управления, первый выход которого подключен к управляющим входам второго и третьего коммутаторов и является вторым выходом блока управления, последовательно соединенные преобразователь кода, вход которого является.четвертым
Изобретение относится к промышленности средств связи и может быть использовано, например, при построении роботов-манипуляторов.
Известна телевизионная система дл измерения координат объекта, содержащая две передающие телевизионные камеры, выход каждой из которых подключен соответственно к первому и второму входам стереоскопического видеоконтрольного блока, к третьему и четвертому входам которого подключены первый и второй выходы датчика импульсов, третий выход которого соединен с первым входом селектора импульсов, первый, второй и третий выходы которого подключены соответственно к первому, второму и третьему входам вычислительного блока через, соединенные последовательно . счетчики импульсов и блоки памяти, к вторым входам первого, второго и третьего блоков памяти подсоединены соответственно первый, второй и третий выходы блока управления, четвертый и пятый выходы которого COOTветственно подключены к второму входу селектора импульсов и пятому входу стереоскопическогр видеоконтрольного блока, к выходу которого подключен вход блока управления tl.
Недостатком этой системы является .низкая точность измерения координат объекта, обусловленная тем, что вследствие нелинейности и нестабильности разверток телевизионной камеры шаг пространственной решетки, формируемой датчиком импульсов, также неравномерен и нестабилен. Поэтому при подсчете импульсов счетчиками возникает ошибка измерения координат
Наиболее близкой к изобретению по технической сущности является телтелевизионная система для измерения координат объектов, содержащая телевизионную камеру, к выходу которой подключен первый вход блока управления , первый и второй выходы которого соединены соответственно с входами блока подсвета и вычислительного блока, к выходу которого подключен второй вход блока управления 1.21.
Недостатком известной системы также является низкая точность«измерения координат объекта, обусловленная тем, что для расчета координат вычислительным блоком используется информация об углах oL и в объекта по отношению к телевизионной камере.
Угол -J- измеряется непосредственно и может быть определен с высокой точностью. В качестве же значений углов ci и 0 используются их оценки cZ и 9 :
)
г
: oC-arctq;- oirct
F
)
9 гЙГС - Clrct
Здесь и m - координаты проекций искомой точки рбъекта на оси системы координат, начало которой совпадает с центром мишени, ориентированные по направлениям соответственно строчной и кадровой разверток;
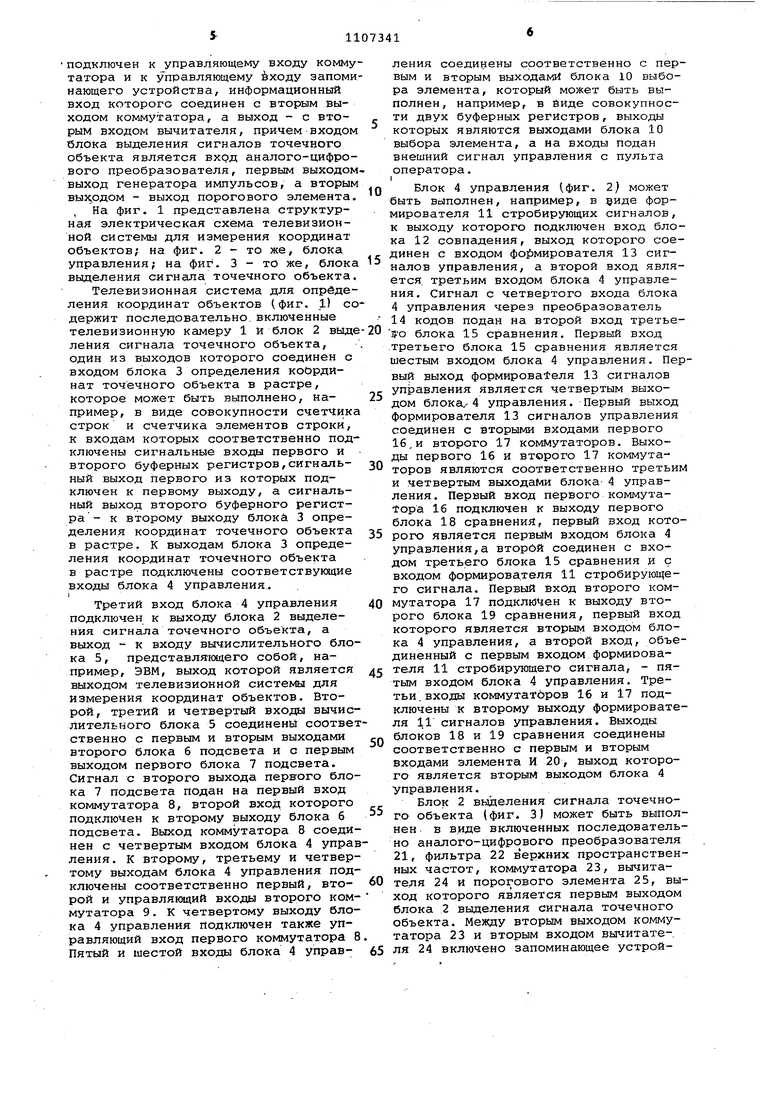
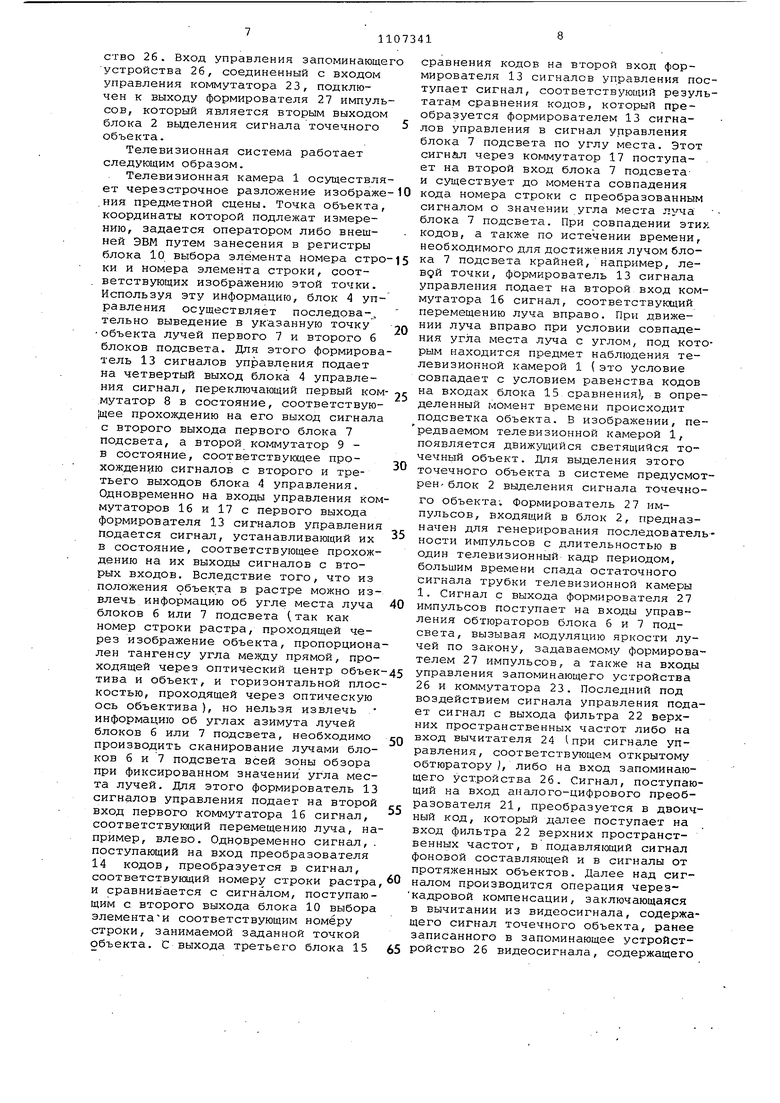
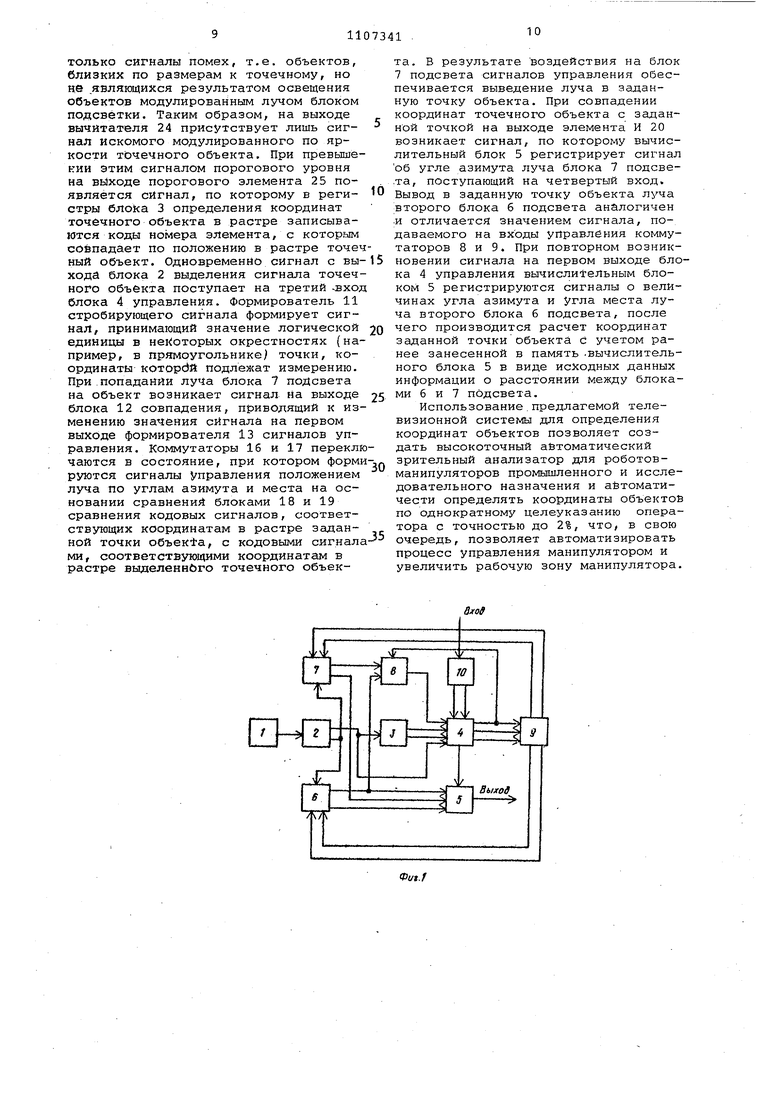
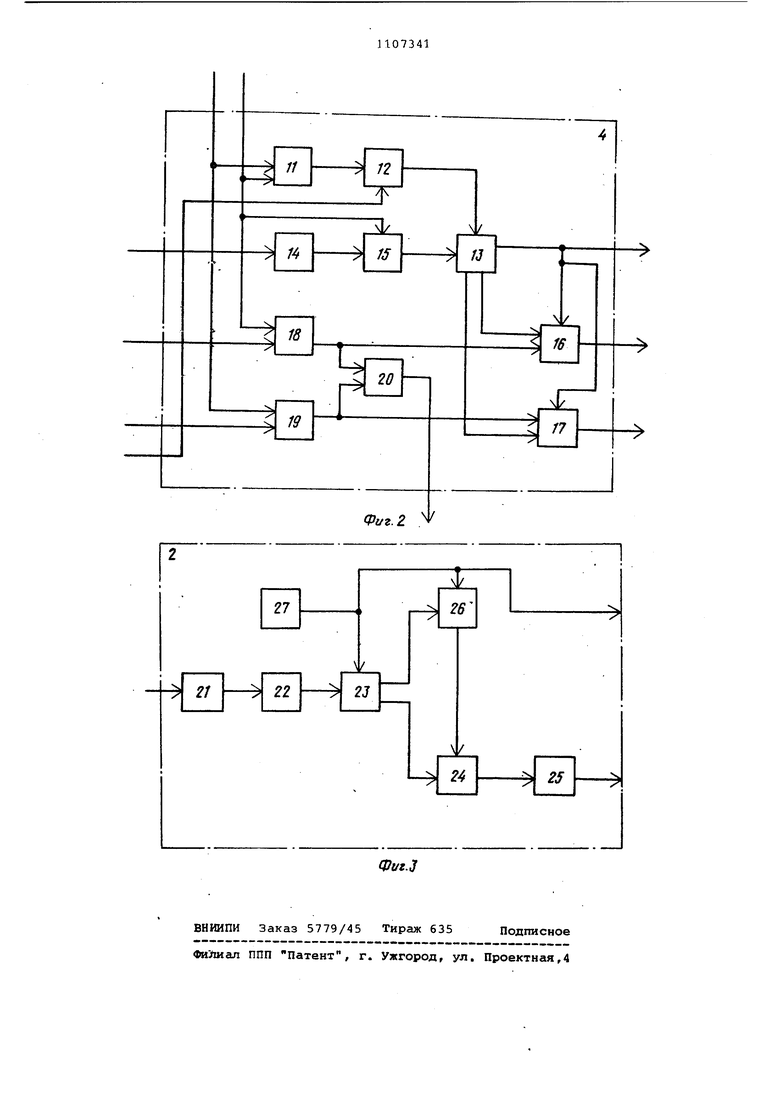
F - фокусное расстояние объектива. Поскольку непосредственно измерить эти координаты невозможно, они вычисляются косвенно через времена Tj, и Г , прошедшие с момента начала соответственно строчной и кадровой разветок до момента регистрации виде сигнала от светового луча, попавшего на объект,через времена Т. и f , соответствующие моментам прохождения строчной и кадровой разверток через центр мишени, и скорость строчной и кадровой размерток и Последние величины являются нестационарными и, как правило, существенно зависящими от величин t. и t, что и определяет низкую точность измерения координат известным зрительным анализатором. d - это угол между осью У и проекцией на плоскость ХОУ вектора, начало которого совпадает с началом координат, а конец с точкой объекта, координаты которой подлежат оп ределению, б - угол между указанным |вектором и его проекцией на плосiKocTb ХОУ, -J- - угол между осью X и лучом, выходящим из устройства подсвета. Целью изобретения является повышение точности измерений координат объектов. Эта цель достигается тем, что в телевизионную систему для измерения координат объектов, содержащую телеви.зионную камеру, с одной стороны которой расположен первый блок подсве та, а также последовательно соединен ные блок управления и вычислительный блок, выход которого является выходо системы, внедены блок выделения сигнала точечного объекта, блок определения координат точечного объекта в растре, второй блок подсвета, расположенный с другой стороны телевизионной камеры, два коммутатора и блок выбора элемента, вход которого является входом системы, причем первый и второй входы блока управления подключены к соответствующим выходам блока определения координат точечно го объекта в растре, вход которого объединен с третьим входом блока управления и подключен к первому выхо ду блока выделения сигнала точечног объекта, вход которого подключен к выходу телевизионной камеры, а втор выход - к первым входам первого и второго блоков подсвета, первый выхо первого блока подсвета соединен со вторым входом вычислительного блока и с первым информационным входом пе вого коммутатора, второй выход - с третьим входом вычислительного блок второй и третий входы - соответстве но с первым и вторым выходами второ го коммутатора, третий и четвертый выходы которого подключены соответс венно ко второму и третьему входам второго блока подсвета, первый выход которого соединен со вторым информационным входом первого коммутатора, а второй .выход - с четвертым входом вычислительного блока, четвертый вход блока управления подключен к выходу первого коммутатора, пятый и шестой входы - соответственно к первому и второму выходам блока выбора элемента, второй выход - к управляющим входам первого и второго коммутаторов, а третий и четвертый выходы - соответственно к первому и второму информационным входам второго коммутатора. Кроме того, блок управления содержит первый блок сравнения, первый вход которого является первым входом блока управления, выход подключен к первому входуэлемента И, выход которого является первым выходом блока управления, и к первому информационному входу первого коммутатора, второй блок сравнения, первый вход которого является вторым входом блока управления, выход подключен ко второму входу элемента И и к первому информационному входу второго коммутатора, последовательно соединенные формирователь стробирующих сигналовi блок совпадения, другой вход которо|го является третьим входом блока уп|равления, И формирователь сигналов управления, первый выход которого подключен к управляющим входам второго и третьего коммутаторов и является вторым выходом блока упрГ1А-:екия, последовательно соединенные преобразователь кода, вход которого является четвертым входом блока управления, и третий блок сравнения, выход которого соединен со вторым входом формирователя сигналов управления, второй выход которого подключен ко второму информационному входу первого коммутатора, выход которого является третьим выходом блока управления, а третий выход подключен к второму информационному входу второго коммутатора, выход которого является четвертым выходом блока управления, при этом второй вход второго блока сравнения объединен с первым входом формирователя стробирующих сигналов и является пятым входом блока управления, а второй вход первого блока сравнения объединен с вторыми входами третьего блока сравнения и формирователя стробирующих сигналов и являет-. ся шесты - входом блока управления. При этом блок вьщеления сигналов точечного объекта содержит последовательно соединенные аналого-цифровой преобразователь, фильтр верхних пространственных частот, коммутатор, вычитатель и пороговый элемент, генератор импульсов, выход которого подключен к управляющему входу комму татора и к управляющему бходу запоми нающего устройства, информационный вход которого соединен с вторым выходом коммутатора, а выход - с вторым входом вычитателя, причем входом блока выделения сигналов точечного объекта является вхрд аналого-цифрового преобразователя, первым выходом выход генератора импульсов, а вторым выходом - выход порогового элемента На фиг. 1 представлена структурная электрическая схема телевизионной системы для измерения координат объектов; на фиг. 2 - то же, блока управления; на фиг. 3 - то же, блока выделения сигнала точечного объекта Телевизионная система для определения координат объектов (фиг. 1) со держит последовательно, включенные телевизионную камеру 1 и блок 2 выд ления сигнала точечного объекта, один из выходов которого соединен о входом блока 3 определения коОрдинат точечного объекта в растре, которое может быть выполнено, например, в виде совокупности счетчик строк и счетчика элементов строки, к входам которых соответственно подключены сигнальные входы первого и второго буферных регистров,сигнальный выход Первого из которых подключен к первому выходу, а сигнальный выход второго буферного регистра- к второму выходу блока 3 определения координат точечного объекта в растре. К выходам блока 3 определения координат точечного объекта в растре подключены соответствующие входы блока 4 управления. Третий вход блока 4 управления подключен к выходу блока 2 выделения сигнала точечного объекта, а выход - к входу вычислительного блока 5, представлягадего собой, например, ЭВМ, выход которой является выходом телевизионной системы для измерения координат объектов. Второй, третий и четвертый входы вычислительного блока 5 соединены соответ ственно с первым и вторым выходами второго блока б подсвета и с первым выходом первого блока 7 подсвета. Сигнал с второго выхода первого блока 7 подсвета подан на первый вход коммутатора 8, второй вход которого подключен к второму выходу блока 6 подсвета. Выход коммутатора 8 соединен с четвертым входом блока 4 управ ления. К второму, третьему и четвертому выходам блока 4 управления подключены соответственно первый, второй и управляющий входы второго коммутатора 9. К четвертому выходу блока 4 управления подключен также управляющий вход первого KONMyTaTOpa 8 Пятый и шестой входы блока 4 управЛенин соединены соответственно с первым и вторым выходами блока 10 выбора элемента, который может быть выполнен, например, в биде совокупности двух буферных регистров, выходы которых являются выходами блока 10 выбора элемента, а на входы подан внешний сигнал управления с пульта оператора. Блок 4 управления (фиг. 2) может быть выполнен, например, в иде формирователя 11 стробирующих сигналов, к выходу которого подключен вход блока 12 совпадения, выход которого соединен с входом фо 1мирователя 13 сигналов управления, а второй вход является третьим входом блока 4 управления. Сигнал с четвертого входа блока 4 управления через преобразователь 14 кодов подан на второй вход третьеуо блока 15 сравнения. Первый вход третьего блока 15 сравнения является шестым входом блока 4 управления. Первый выход формирователя 13 сигналов управления является четвертым выходом блока/4 управления. Первый выход формирователя 13 сигналов управления соединен с вторыми входами первого 16,и второго 17 коммутаторов. Выходы первого 16 и второго 17 коммутаторов являются соответственно третьим и четвертым выходами блока 4 управления. Первый вход первого коммутатора 16 подключен к выходу первого блока 18 сравнений, первый вход которого является первым входом блока 4 управления,а второй соединен с входом третьего блока 15 сравнения и с входом формирователя 11 стробирующего сигнала. Первый вход второго коммутатора 17 пс5дклк} 1ен к выходу второго блока 19 сравнения, первый вход которого является вторым входом блока 4 управления, а второй вход, объединенный с первым входом формирователя 11 стробирующего сигнала, - пятым входом блока 4 управления. Третьи, входы коммутаторов 16 и 17 подключены к второму выходу формирователя 11 сигналов управления. Выходы блоков 18 и 19 сравнения соединены соответственно с первым и вторым входами элемента И 20, выход которого является вторым выходом блока 4 управления. Блок 2 выделения сигнала точечного объекта (фиг. 3) может быть выполнен в виде включенных последовательно аналого-цифрового преобразователя 21, фильтра 22 верхних пространственных частот, коммутатора 23, вычитателя 24 и порогового элемента 25, выход которого является первым выходом блока 2 выделения сигнала точечного объекта. Между вторым выходом коммутатора 23 и вторым входом вычитателя 24 включено запоминающее устройство 26. Вход управления запоминающе устройства 26, соединенный с входом управления коммутатора 23, подключен к выходу формирователя 27 импульсов, который является вторым выходом блока 2 выделения сигнала точечного объекта. Телевизионная система работает следующим образом. Телевизионная камера 1 осуществля ет черезстрочное разложение изображе ,ния предметной сцены. Точка объекта, координаты которой подлежат измерению, задается оператором либо внешней ЭВМ путем занесения в регистры блока 10 выбора элемента номера стро ки и номера элемента строки, соответствующих изображению этой точки. Используя эту информацию, блок 4 управления осуществляет последова-, тельно выведение в указанную точку объекта лучей первого 7 и второго 6 блоков подсвета. Для этого формирова тель 13 сигналов управления подает на четвертый выход блока 4 управления сигнал, переключающий первый ком мутатор 8 в состояние, соответствую|щее прохождению на его выход сигнала с второго выхода первого блока 7 подсвета, а второй коммутатор 9 в состояние, соответствующее прохождению сигналов с второго и третьего выходов блока 4 управления. Одновременно на входы управления ком мутаторов 16 и 17 с первого выхода формирователя 13 сигналов управления подается сигнал, устанавливающий их в состояние, соответствующее прохождению на их выходы сигналов с вторых входов. Вследствие того, что из положения объекта в растре можно извлечь информацию об угле места луча блоков 6 Или 7 подсвета (так как номер строки растра, проходящей через изображение объекта, пропорциона лен тангенсу угла между прямой, проходящей через оптический центр объек тива и объект, и горизонтальной плос костью, проходящей через оптическую ось объектива), но нельзя извлечь информацию об углах азимута лучей блоков 6 или 7 подсвета, необходимо производить сканирование лучами блоков б и 7 подсвета всей зоны обзора при фиксированном значении угла места лучей. Для этого формирователь 13 сигналов управления подает на второй вход первого коммутатора 16 сигнал, соответствую(дий перемещению луча, на пример, влево. Одновременно сигнал, . поступающий на вход преобразователя 14 кодов, преобразуется в сигнал, соответствунхдий номеру строки растра и сравнивается с сигналом, поступающим с второго выхода блока 10 выбора элементами соответствующим номеру строки, занимаемой заданной точкой объекта. С выхода третьего блока 15 сравнения кодов на второй вход форирователя 13 сигналов управления поступает сигнал, соответствующий результатам сравнения кодов, который преобразуется формирователем 13 сигнаов управления в сигнал управления блока 7 подсвета по углу места. Этот сигнал через коммутатор 17 поступа- . ет на второй вход блока 7 подсветаи существует до момента совпадения кода номера строки с преобразованным сигналом о значении угла места луча блока 7 подсвета. При совпадении этих кодов, а также по истечении времени, необходимого для достижения лучом блока 7 подсвета крайней, например, леBQH точки, формирователь 13 сигнала управления подает на второй вход коммутатора 16 сигнал, соответствующий перемещению луча вправо. При движении луча вправо при условии совпадения угла места луча с углом, под которым находится предмет наблюдения телевизионной камерой 1 ( это условие совпадает с условием равенства кодов на входах блока 15 сравнения), в определенный момент времени происходит подсветка объекта. Б изображении, передваемом телевизионной камерой 1, появляется движущийся светящийся точечный объект. Для выделения этого точечного объекта в системе предусмотрен- блок 2 выделения сигнала точечного объекта; Формирователь 27 импульсов, входящий в блок 2, предназначен для генерирования последовательности импульсов с длительностью в один телевизионный кадр периодом, больщим времени спада остаточного сигнала трубки телевизионной камеры 1. Сигнал с выхода формирователя 27 импульсов поступает на входы управления обтюраторов блока 6 и 7 подсвета, вызывая модуляцию яркости лучей по закону, задаваемому формирователем 27 импульсов, а также на входы управления запоминающего устройства 26 и коммутатора 23. Последний под воздействием сигнала управления подает сигнал с выхода фильтра 22 верхних пространственных частот либо на вход вычитателя 24 (при сигнале управления, соответствующем открытому обтюратору ), либо на вход запоминающего устройства 26. Сигнал, поступающий на вход аналого-цифрового преобразователя 21, преобразуется в двоичный код, который далее поступает на вход фильтра 22 верхних пространственных частот, в подавляющий сигнал фоновой составляющей и в сигналы от протяженных объектов. Далее над сигналом производится операция черезкадровой компенсации, заключающаяся в вычитании из видеосигнала, содержащего сигнал точечного объекта, ранее записанного в запоминающее устройстройство 26 видеосигнала, содержащего ТОЛЬКО сигналы помех, т.е. объектов, близких по размерам к точечному, но не .являющихся результатом освещения объектов модулированным лучом блоком подсветки. Таким образом, на выходе вычитателя 24 присутствует лишь сигнал искомого модулированного по яркости точечного объекта. При превышекии этим сигналом порогового уровня на выходе порогового элемента 25 появляется сигнал, по которому в регистры блока 3 определения координат точечного объекта в растре записываются коды номера элемента, с которым совпадает по положению в растре точеч ный объект. Одновременно сигнал с выхода блока 2 выделения сигнала точеч ного объекта поступает на третий -лход блока 4 управления. Формирователь 11 стробирующего сигнала формирует сигнал, принимающий значение логической единицы в некоторых окрестностях (на пример, в прямоугольнике точки, координаты котордй подлежат измерению. При попадании луча блока 7 подсвета на объект возникает сигнал на выходе блока 12 совпадения, приводящий к из менению значения сигнала на первом выходе формирователя 13 сигналов управления. Коммутаторы 16 и 17 перекл чаются в состояние, при котором форм руются сигналы управления положением луча по углам азимута и места на основании сравнений блоками 18 и 19 сравнения кодовых сигналов, соответствующих координатам в растре заданной точки объекта, с кодовыми сигнал ми, соответствующими координатам в растре выделеннбго точечного объекта. В результате воздействия на блок 7 подсвета сигналов управления обеспечивается выведение луча в заданную точку объекта. При совпадении координат точечного объекта с заданной точкой на выходе элемента И 20 возникает сигнал, по которому вычислительный блок 5 регистрирует сигнал об угле азимута луча блока 7 подсве.та, поступающий на четвертый вход. Вывод в заданную точку объекта луча второго блока б подсвета аналогичен .н отличается; значением сигнала, подаваемого на входы управления коммутаторов 8 и 9. При повторном возникновении сигнала на первом выходе блока 4 управления вычислительным блоком 5 регистрируются сигналы о величинах угла азимута и Угла места луча второго блока 6 подсвета, после чего производится расчет координат заданной точкиобъекта с учетом ранее занесенной в память .вычислительного блока 5 в виде исходных данных информации о расстоянии между блоками 6 и 7 подсвета. Использование.предлагемой телевизионной системы для определения координат объектов позволяет создать высокоточный автоматический зрительный анализатор для роботовманипуляторов промышленного и исследовательного назначения и абтоматичести определять координаты объектов по однократному целеуказанию оператора с точностью до 2%, что, в свою очередь, позволяет автоматизировать процесс управления манипулятором и увеличить рабочую зону манипулятора.
Т
27
гб
/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения координат объекта | 1975 |
|
SU603151A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Катыс Г.П | |||
| Оптические информационные системы роботов-манипуляторов | |||
| М., Связь, 1977, с | |||
| Солесос | 1922 |
|
SU29A1 |
