О
VI N4
ю
00
СО
Изобретение относится к горной промышленности, а более конкретно к системам автоматического управления режимами бурения, и может быть использовано при бурении с гидравлическим механизмом подачи шпуров, скважин и восстающих выработок.
Целью изобретения является повышение точности управления при стабилизации номинальной мощности двигателя вращателя.
На чертеже представлена структурная схема системы автоматического управления режимом бурения.
Предлагаемая система содержит гидроцилиндры 1 подачи, регулируемый гидродроссель 2, дифференциальный датчик 3 давления, датчик 4 скорости бурения, усилитель 5, тиристорный преобразователь 6, исполнительный механизм 7 вращателя, тахогенератор 8, множительный блок 9, даухпороговый компаратор 10, задатчик 11 интенсивности режима бурения, блок 12 управления, серводвигатель 13, буровой став 14.
Выход датчика 4 скорости бурения соединен с входом усилителя 5, выход которого через тиристорный преобразователь б подключен ко входу исполнительного механизма 7 вращателя. Буровой став 14 жестко соединен с валом тахогенератора 8., Выход последнего соединен с первым входом множительного блока 9. Входы дифференциального датчика 3 давления соединены с штоковыми и поршневыми полостями гидроцилиндров 1, а выход соединен с другим входом множительного блока 9. Выход последнего соединен4 с одним из входов двух- порогового компаратора 10. Выход задатчика 11 интенсивности режима бурения подключен к другому входу двухпорого- вого компаратора 10, а его выход соединен с входом блока 12 управления. К его выходу подключен серводвигатель 13, Вал серводвигателя 13 жестко соединен с заслонкой регулируемого гидродвигателя 2, а вход последнего соединен с поршневой полостью гидроцилиндров 1.
Система автоматического управления режимом бурения работает следующим образом.
До начала бурения регулируемый гидродроссель 2 устанавливают в зоне чувствительности, исходя из крепости буримых пород. Задатчиком 11 устанавливают интенсивность режима бурения, исходя из номинальной мощности исполнительного механизма 7 вращателя.
При переходе с мягкой на твердую породу скорость бурения снижается, а вместе с ней и падение давления на гидродросселе 2, следовательно, осевое усилие на забой
увеличивается. При уменьшении скорости бурения сигнал с выхода датчика 4 скорости бурения уменьшается, следовательно, уменьшается сигнал и на выходе усилителя
5, а также на выходе тиристорного преобразователя 6. Скорость вращения исполнительного механизма 7, а значит и бурового инструмента тоже уменьшается, как и сигнал с выхода тахогенератора 8. Сигнал на
0 выходе дифференциального датчика 3 давления увеличивается. Сигналы с выходов блоков 8 и 3 поступают на множительный блок 9,с выхода которого сигнал подается на первый вход двухпорогового компаратора
5 10, в котором он сравнивается с сигналом задатчика интенсивности 11 режима бурения. Если при этом сигнал на выходе блока 9 больше сигнала на выходе задатчика 11, то на выходе двухпорогового компаратора
0 10 появляется сигнал отрицательной полярности, который подается на вход блока 12 управления. Последний включает серводвигатель 13, его вал, вращаясь, увеличивает проходное сечение регулируемого гидро5 дросселя 2 и тем самым уменьшает величину сигнала на выходе дифференциального датчика 3 давления. Этот процесс будет продолжаться до тех пор, пока сигналы на выходах б,юкоз 9 и 11 не станут равными.
0 После этого серводвигатель 13 отключается, В случае, если сигнал на выходе блока 9 меньше сигнала на выходе задатчика 11, то серводвигатель 13 включается и его вал начинает вращаться в обратном направлении
5 до тех пор, пока сигналы на выходах выше описанных блоков не станут равными.
При переходе с твердой на мягкую породу скорость бурения, а значит и скорость вращения бурового инструмента увеличива0 ются, а осевое усилие на забой уменьшается. Однако и в этом случае интенсивность режима бурения поддерживается на постоянном уровне, как было описано выше. Следовательно, при изменении крепо5 сти буримых пород система отрабатывает изменение осевого усилия на забой и скорость вращения бурового инструмента в опти- мальных режимах, ведя проходку с постоянной интенсивностью режима буре0 мия, заданную блоком 11, с одновременной стабилизацией номинальной мощности исполнительного механизма 7 вращателя. Формула изобретения Система автоматического управления
5 режимом бурения, содержащая регулируемый гидродроссель, тахогенератор и датчик скорости бурения, «ход которого через усилитель и тиристорный преобразователь подключен к входу исполнительного механизма вращателя, отличающаяся тем,
что, с целью повышения точности управле-ственно с первым и вторым входами мнония, система снабжена дифференциальнымжительного блока, выход которого подклюдатчиком давления, множительным блоком,чен к первому входу двухпорогового
эадатчиком интенсивности режима буре-компаратора, выход задатчика интенсивнония, двухпороговым компаратором, блоком5 сти режима бурения соединен со вторым
управления и серводвигателем, при этомвходом двухпорогового компаратора, выход
выходы тахогенератора и дифференциаль-которого через блок управления подключен
кого датчика давления соединены соответ-к серводвигателю.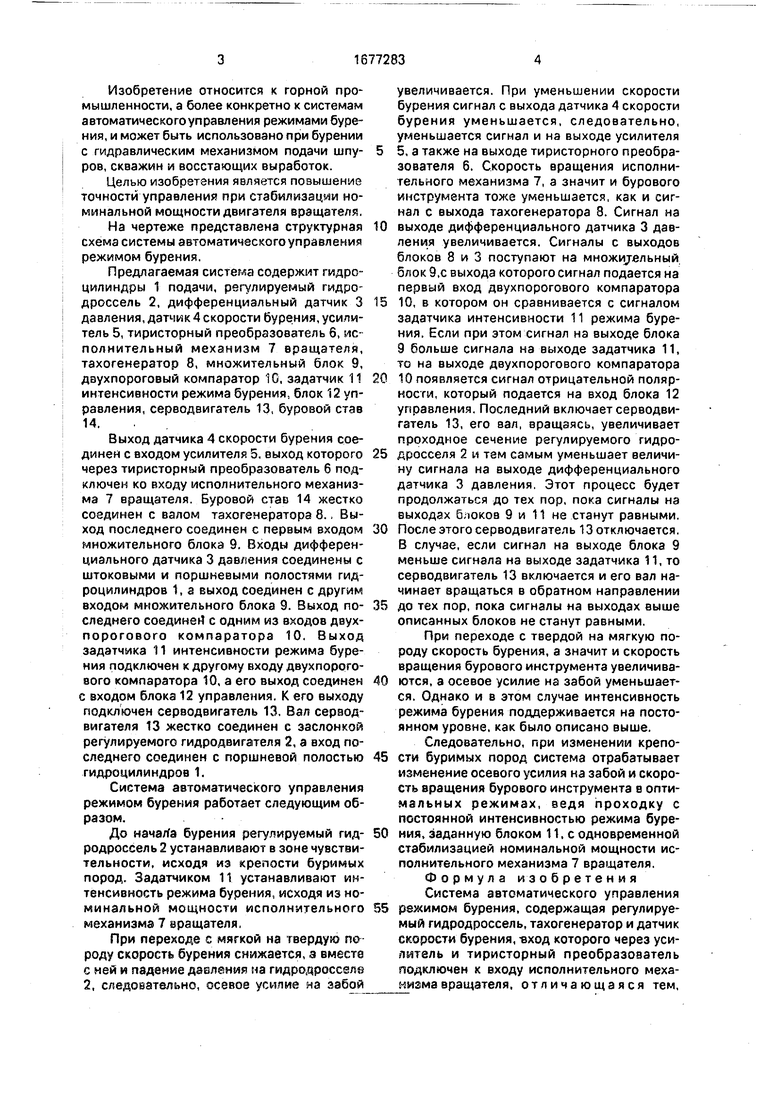
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления режимом бурения | 1990 |
|
SU1809022A1 |
| Система автоматического управления режимом бурения | 1990 |
|
SU1821552A1 |
| СИСТЕМА УПРАВЛЕНИЯ РЕЖИМОМ АЛМАЗНОГО БУРЕНИЯ | 1993 |
|
RU2026973C1 |
| Система автоматического регулирования осевой нагрузки частоты вращения | 1990 |
|
SU1719122A1 |
| Автоматический регулятор осевого усилия бурового инструмента на забой | 1986 |
|
SU1372034A1 |
| Автоматический регулятор осевого усилия бурового инструмента на забой | 1988 |
|
SU1548418A2 |
| Автоматический регулятор осевого усилия бурового инструмента | 1990 |
|
SU1745908A1 |
| Автоматическое устройство управления бурового станка | 1980 |
|
SU909139A2 |
| Регулятор подачи буровой машины | 1984 |
|
SU1162952A1 |
| РЕГУЛЯТОР ПОДАЧИ БУРОВОГО ИНСТРУМЕНТА | 1991 |
|
RU2013531C1 |
Изобретение относится к горной промышленности и предназначено для автоматического управления режимами бурения скважин. Цель - повышение точности управления режимом бурения при стабилизации номинальной мощности двигателя вращателя. Система содержит регулируемый гидродроссель 2, тахогенератор 8, датчик 4 скорости, усилитель 5, тиристорный преобразователь 6 и исполнительный механизм 1 вращателя. Дополнительно система снабжена дифференциальным датчиком 3 давления, множительным блоком 9, за датчиком 11 интенсивности режима бурения, двухпо- роговым компаратором 10, блоком 12 управления и серводвигателем 13. Сигнал с датчика 4 бурения управляет исполнительным механизмом 7 вращателя. Сигналы с тахогенерзтора 8 и дифференциального датчика 3 поступают на входы множительного блока 9. Сигнал с блока 9 в двухпорого- вом компараторе 10 сравнивается с заданным блоком 11 значением интенсивности режима бурения. По результатам сравнения блок 12 управления изменяет направление вращения серводвигателя 13. Вал серводвигателя 13 жестко соединен с заслонкой регулируемого гидродросселя 2. 1 ил.
| Марсанов Ю.П | |||
| и др | |||
| Динамические свойства механизма гидроподачи бурового става и некоторые принципы автоматизации шарошечных станков | |||
| Известия ВУЗов | |||
| Горный журнал, 1967, N 6, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
