Изобретение относится к гидроавтоматике и может быть использовано электрогидравлических приводах подъемно-транспортных агрегатов.
Целью изобретения является расширение функциональных возможностей за счет увеличения диапазона управления
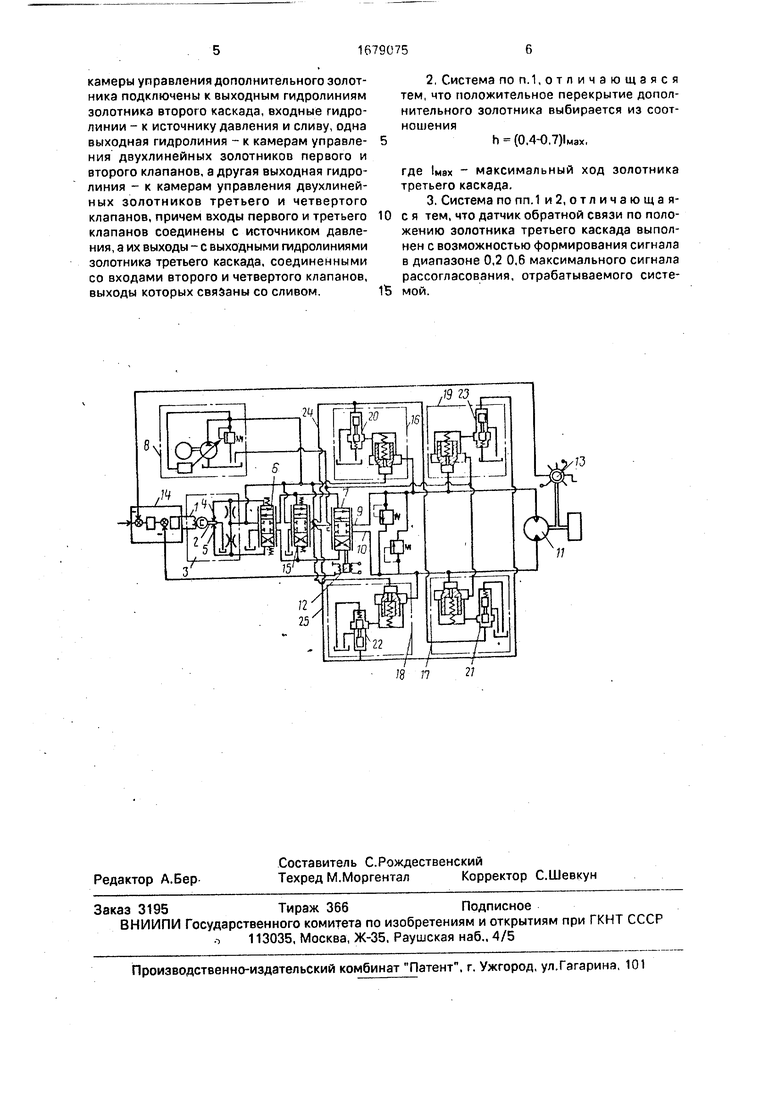
На чертеже изображена схема электрогидравлической следящей системы.
Система содержит электромеханический преобразователь 1, соединенный с подвижным элементом, например заслонкой 2 элемента сопло-заслонка первого каскада 3 усиления, сопла 4,5 которого подключены к камерам (не обозначены) управления золотника 6 второго каскада, соединенного выходными гидролиниями с камерами управления золотника 7 третьего каскада,
входные гидролинии которого связаны с источником 8 давления и сливом, а выходные гидролинии 9,10 - с исполнительным гидродвигателем 11, а также датчики 12,13 обратной связи по положению золотника 7 и гидродивигателя 11, соответственно подключенные к сравнивающему устройству 14, установленному на входе преобразователя 1.
Кроме того, система содержит дополнительный золотник 15 и первый, второй, третий и четвертый управляемые клапаны 16-19 соответственно, которые снабжены двухлинейными двухпозиционными нормальнозак- рытыми управляемыми распределителями 20-23, соответственно, и дросселями, включенными между входами клапанов 16-19 и их полостями управления. Одна из гидролиVI
ю о VI ел
ний каждого распределителя 20-23 соединена с полостью управлени я одного из клапанов 16-19, а другая - со сливом. Камеры управления золотника 15 подключены к выходным гидролиниям золотника 6, входные гидролинии - к источнику 8 давления и сливу, выходная гидролиния 24 - к камерам управления золотников 7 и 15. выходная гидролиния 25 - к камерам управления золотников 6 и 7, причем входы клапанов 16, 18 соединены с источником 8 давления, а выходы -с гидролиниями 9,10 соединенными с входами клапанов 17, 19, выходы которых соединены со сливом.
Дополнительный золотник 15 выполнен с положительным перекрытием выходных гидролиний, определенным из соотношения
h (0,4 -0,7) 1Мах, где I мах - максимальный ход золотника 7,
Датчик 12 выполнен с возможностью формирования сигнала в диапазоне 0,2-0,6 максимального сигнала рассогласования, отрабатываемого системой.
Электрогидравлическая следящая система работает следующим образом.
При отсутствии управляющего сигнала заслонка 2, золотники 6,7 и 15 находятся в нейтральном положении.
В зависимости от величины поступающего управляющего сигнала на входе устройства 14 следящая система .может работать в режимах отработки либо малых, либо больших рассогласований.При отработке малых рассогласований основным требованием к следящей системе является обеспечение высокой точности при управлении относительно малыми по производительности и давлению потоками рабочей жидкости, поступающими к гидродвигателю 11 через трехкаскадный электрогидравлический усилитель. Золотник 7 третьего каскада перемещается при малых рассогласованиях на величину не более 0,2 0,3 его максимального хода. На такую же величину перемещается золотник 15. Однако из-за больших перекрытий в золотнике 15 через него не поступает рабочая жидкость в камеры управления распределителей 20-23. Таким образом, следящая система работает в обычном режиме слежения при отработке малых рассогласований.
При поступлении на вход устройства 14 больших рассогласований золотники 7, 15 перемещаются в крайние положения. При этом на вход устройства 14 от датчика 12 приходит сигнал, соответствующий положению золотника 7, но меньший по величине по сравнению с сигналом рассогласования.
Через дросселирующие щели золотника 7 рабочая жидкость будет поступать в гидродвигатель 11. Через рабочие дросселирующие щели золотника 15 рабочая жидкость поступает в камеры управления распределителей 20, 21 (или 22,23), которые перемещаются, открывая полости управления клапанов 16,17 на слив. Открываются клапаны 16, 17 (или 18,19), пропуская рабо0 чую жидкость от источника 8 давления в лидролинию 9 (10) и через клапаны 17 (19) из гидролинии 10 (9) на слив. Таким образом происходит управление потоками рабочей жидкости с большим расходом при большем
5 давлении через клапаны 16-19 параллельно потокам через золотник 7.
После отработки рассогласования гидродвигателем 11 сигнал рассогласования устройства 14 уменьшится соответственно
0 сигналу датчика 13, перепад давления в выходных гидролиниях золотника 6 также уменьшится и золотник 15 будет возвращаться в нейтральное положение. При приближении золотника 15 к нейтральному
5 положению произойдет перекрытие гидролиний 24, 25, клапаны 16,17 (18,19) закроются. Отработка оставшегося небольшого рассогласования будет выполняться за счет управления золотника 7.
0 Формула изобретения
1. Электрогидравлическая следящая система, содержащая электромеханический преобразователь, соединенный с подвижным элементом первого каскада усилия,
5 подключенного к камерам управления золотника второго каскада, соединенного выходными гидролиниями с камерами управления золотника третьего каскада, входные гидролинии которого связаны с
0 источником давления и сливом, а выходные -с исполнительным гидродвигателем, а также датчик обратной связи по положению золотника третьего каскада подключенный к сравнивающему устройству, установлен5 ному на входе электромеханического преобразователя, отличающаяся тем, что, с целью расширения функциональных возможностей за счет увеличения диапазона управления, она снабжена дополнительным
0 золотником, выполненным с положительным перекрытием выходных гйдролиний, и четырьмя управляемыми клапанами, каждый из которых снабжен двухлинейным двухпозиционным нормальнозакрытым уп5 равляемым распределителем и дросселем, включенным между входом клапана и его полостью управления, соединенной с одной гидролинией соответствующего двухлинейного распределителя, другая гидролиния которого соединена со сливом, при этом
камеры управления дополнительного золотника подключены к выходным гидролиниям золотника второго каскада, входные гидролинии - к источнику давления и сливу, одна выходная гидролиния - к камерам управления двухлинейных золотников первого и второго клапанов, а другая выходная гидролиния - к камерам управления двухлинейных золотников третьего и четвертого клапанов, причем входы первого и третьего клапанов соединены с источником давления, а их выходы - с выходными гидролиниями золотника третьего каскада, соединенными со входами второго и четвертого клапанов, выходы которых связаны со сливом.
2,Система по п. 1,отличающаяся тем, что положительное перекрытие дополнительного золотника выбирается из соотношения
h (0.4-0,7)1„ах,
где 1Мах - максимальный ход золотника третьего каскада.
3.Система по пп. 1 и 2, отличающая- с я тем, что датчик обратной связи по положению золотника третьего каскада выполнен с возможностью формирования сигнала в диапазоне 0,2 0.6 максимального сигнала рассогласования, отрабатываемого системой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1980 |
|
SU941701A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1981 |
|
SU1066280A1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2133386C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2003 |
|
RU2262625C2 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
Изобретение относится к области гидроавтоматики и может быть использовано в электрогидравличееких приводах подъемно- транспортных агрегатов. Целью изобретения является расширение функциональных возможностей за счет -увеличения диапазона управления. В зависимости от величины управляющего сигнала на входе устройства 14 система работает в режиме малых либо больших рассогласований. При отработке малых рассогласований перемещение золотника 15 недостаточно для открытия гидролиний 24, 25 и включения клапанов 16-19, управление гидродвигателем 11 осуществляется только за счет перемещения золотника 7. При больших рассогласованиях золотники 7, 15 перемещаются в крайние положения и два из клапанов 16, 17, 18, 19 открываются, соединяя дополнительно одну из гидролиний 9, 10 с источником 8 давления, а другую - со сливом. По мере отработки сигнал датчика 13 увеличится, рассогласование уменьшится и золотник 15 будет перемещаться в нейтральное положение. Отработка оставшегося рассогласования осуществляется золотником 7. (Л С
27
| Разинцев В,И | |||
| Электрогидравлические усилители мощности | |||
| М.: Машиностроение, 1980, с.92, рис.41. |
