ством электронно-лучевой трубки 1, маски 2, оптической системы 3 и фотодатчика 5 и воздействуют соответственно на компараторы 10,11 и 17, на которые поступают входные сигналы соответственно по входным шинам 13,14 и 19. При попадании электронного луча на экране электронно-лучевой трубки 1 в определенное положение на выходах компараторов 10, 11 и 17 появляются сигналы, вызывающие срабатывание элемента б совпадения. При этом сигнал с выхода элемента 6 совпадения открывает ключ 5, с выхода которого на выходную шину 12 подается сигнал, характеризующий значение гипотезы. Кроме того, сигнал элемента 6 совпадения через интервал времени, определяемый элементом 7 задержки, обеспечивает исчезновение сигналов на выходах компараторов 10, 11 и 17 и элемента 6 совпадения, после чего цикл сканирования экрана электронно-лучевой трубки 1 повторяется.1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГИСТРАЦИИ СОСТОЯНИЯ ПАРАМЕТРОВ КОНТЕЙНЕРА ПО ПУТИ ЕГО СЛЕДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325621C1 |
| СПОСОБ ГЕНЕРАЦИИ И ПРИЕМА СООБЩЕНИЙ О НЕСАНКЦИОНИРОВАННОМ ДОСТУПЕ К СОДЕРЖИМОМУ КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2344484C2 |
| СПОСОБ РАСПРЕДЕЛЕННОГО МОНИТОРИНГА КОНТЕЙНЕРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2329470C1 |
| Устройство для регистрации колебаний в цвете | 1984 |
|
SU1167429A1 |
| Электронно-лучевой осциллограф | 1983 |
|
SU1171718A1 |
| Осциллографический способ измерения временных параметров сигналов | 1985 |
|
SU1372234A1 |
| Электронно-лучевой осциллограф | 1983 |
|
SU1117536A1 |
| Устройство для формирования фигур конических сечений на экране электроннолучевой трубки | 1976 |
|
SU643924A1 |
| Устройство для регистрации информации | 1985 |
|
SU1308839A1 |
| ОСЦИЛЛОГРАФ | 1991 |
|
RU2106645C1 |
Изобретение относится к технике измерения и может найти применение при прогнозировании состояния систем управления Цель изобретения - повышение точности прогнозирования состояния систем управления В устройстве генератор 8 горизонтальной развертки, генератор 9 вертикальной развертки, генератор 15 синусоидальных колебаний и генератор 18 пилообразного напряжения через блок 16 кодированного согласования обеспечивают трехмерное осциллографирование посред3 Ч (Л С о о ю ел
Изобретение относится к измерительной технике, а именно к устройствам для прогнозирования состояния систем управления.
Цель изобретения - повышение точности прогнозирования состояния систем управления.
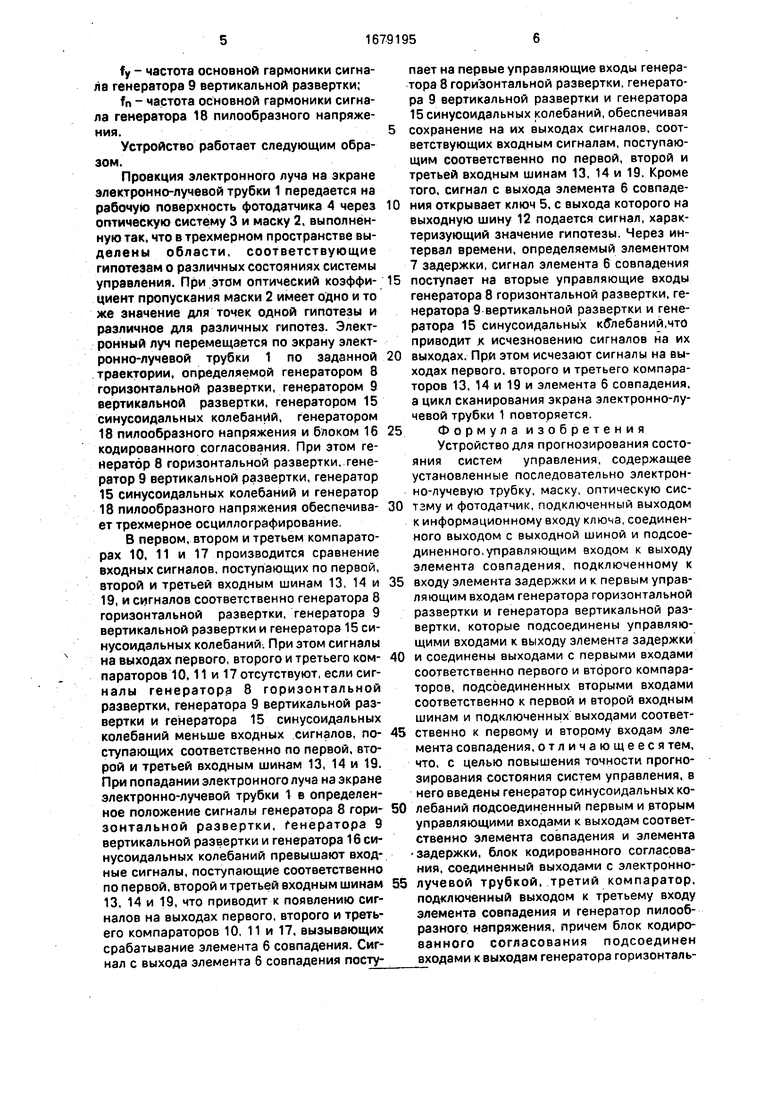
На чертеже изображено предлагаемое устройство для прогнозирования состояния систем управления.
Устройство содержит установленные последовательно электронно-лучевую трубку 1, маску 2, оптическую систему 3 и фотодатчик 4, выполненный в виде фоторезистора и подключенный выходом к информационному входу ключа 5, элемент 6 совпадения, элемент 7 задержки, генератор 8 горизонтальной развертки, генератор 9 вертикальной развертки, первый и второй компараторы 10 и 11, выходную шину 12 и первую и вторую входные шины 13 и 14. Ключ 5 соединен выходом с выходной шиной 12 и подсоединен управляющим входом к выходу элемента 6 совпадения, подключенному к входу элемента 7 задержки и к первым управляющим входам генератора 8 горизонтальной развертки и генератора 9 вертикальной развертки. Генератор 8 горизонтальной развертки и генератор 9 вертикальной развертки подсоединены вторыми управляющими входами к выходу элемента 7 задержки и соединены выходами с первыми входами соответственно первого и второго компараторов 10 и 11. Первый и второй компараторы 10 и 11 подсоединены вторыми входами соответственно к первой и второй входным шинам 13 и 14 и подключены выходами соответственно к первому и второму входам элемента 6 совпадения.
Устройство содержит также генератор 15 синусоидальных колебаний, подсоединенный первым и вторым управляющими входами к выходам соответственно элемента 6 совпадения и элемента 7 задержки, блок 16 кодированного согласования, соединенный выходами с электронно-лучевой трубкой 1, третий компаратор 17, подключенный выходом к третьему входу элемента 6 совпадения, и низкочастотный генератор 18 пилообразного напряжения. Блок 16 кодированного согласования подсоединен входами к выходам генератора 8 горизонтальной развертки, генератора 9 вертикальной развертки и генератора 18 пилообразного напряжения и к выходу генератора 15 синусоидальных колебаний, подключенному к входу генератора 18 пилообразного напряжения и к первому входу третьего компаратора 17, снабженного соединенной с его вторым входом третьей входной шиной 19. Блок 16 кодированного согласования состоит из шифратора 20, дешифратора 21 и включенного между ними блока 22 пассивных элементов согласования. При этом входы шифратора 20 совпадают с входами блока 16 кодированного согласования, а выходы дешифратора 21 - с
выходами блока 16 кодированного согласования.
Сигналы генератора 8 горизонтальной развертки, генератора 9 вертикальной развертки, генератора 15 синусоидальных колебаний и генератора 18 пилообразного напряжения определяйся следующими неравенствами:
г (0,5-0,9) fc fn fzffy fx;
2fnЈ fz:5 fy/l67 10fz :Ј fy fy/2.
где fc - частота напряжения сетевого питания;
fz - частота сигнала генератора 15 синусоидальных колебаний;
fx - частота основной гармоники сигнала генератора 8 горизонтальной развертки:
fy - частота основной гармоники сигнала генератора 9 вертикальной развертки;
fn - частота основной гармоники сигнала генератора 18 пилообразного напряжения.
Устройство работает следующим образом.
Проекция электронного луча на экране электронно-лучевой трубки 1 передается на рабочую поверхность фотодатчика 4 через оптическую систему 3 и маску 2, выполненную так, что в трехмерном пространстве выделены области, соответствующие гипотезам о различных состояниях системы управления. При этом оптический коэффи- циеит пропускания маски 2 имеет одно и то же значение для точек одной гипотезы и различное для различных гипотез. Электронный луч перемещается по экрану электронно-лучевой трубки 1 по заданной траектории, определяемой генератором 8 горизонтальной развертки, генератором 9 вертикальной развертки, генератором 15 синусоидальных колебаний, генератором 18 пилообразного напряжения и блоком 16 кодированного согласования. При этом генератор 8 горизонтальной развертки, генератор 9 вертикальной развертки, генератор 15 синусоидальных колебаний и генератор 18 пилообразного напряжения обеспечива- ет трехмерное осциллографирование,
В первом, втором и третьем компараторах 10, 11 и 17 производится сравнение входных сигналов, поступающих по первой, второй и третьей входным шинам 13, 14 и 19, и сигналов соответственно генератора 8 горизонтальной развертки, генератора 9 вертикальной развертки и генератора 15 синусоидальных колебаний. При этом сигналы на выходах первого, второго и третьего ком- параторов 10,11 и 17 отсутствуют, если сигналы генератора 8 горизонтальной развертки, генератора 9 вертикальной развертки и генератора 15 синусоидальных колебаний меньше входных сигналов, по- ступающих соответственно по первой, второй и третьей входным шинам 13, 14 и 19. При попадании электронного луча на экране электронно-лучевой трубки 1 в определенное положение сигналы генератора 8 гори- зонтальной развертки, генератора 9 вертикальной развертки и генератора 16 синусоидальных колебаний превышают входные сигналы, поступающие соответственно по первой, второй и третьей входным шинам 13, 14 и 19, что приводит к появлению сигналов на выходах первого, второго и третьего компараторов 10, 11 и 17, вызывающих срабатывание элемента 6 совпадения. Сигнал с выхода элемента 6 совпадения поступает на первые управляющие входы генератора 8 горизонтальной развертки, генератора 9 вертикальной развертки и генератора 15 синусоидальных колебаний, обеспечивая сохранение на их выходах сигналов, соответствующих входным сигналам, поступающим соответственно по первой, второй и третьей входным шинам 13, 14 и 19. Кроме того, сигнал с выхода элемента 6 совпадения открывает ключ 5, с выхода которого на выходную шину 12 подается сигнал, характеризующий значение гипотезы. Через интервал времени, определяемый элементом 7 задержки, сигнал элемента 6 совпадения поступает на вторые управляющие входы генератора 8 горизонтальной развертки, генератора 9 вертикальной развертки и генератора 15 синусоидальных колебаний,что приводит к исчезновению сигналов на их выходах. При этом исчезают сигналы на выходах первого, второго и третьего компараторов 13, 14 и 19 и элемента 6 совпадения, а цикл сканирования экрана электронно-лучевой трубки 1 повторяется.
Формула изобретения Устройство для прогнозирования состояния систем управления, содержащее установленные последовательно электронно-лучевую трубку, маску, оптическую сис- тэму и фотодатчик, подключенный выходом к информационному входу ключа, соединенного выходом с выходной шиной и подсоединенного, управляющим входом к выходу элемента совпадения, подключенному к входу элемента задержки и к первым управляющим входам генератора горизонтальной развертки и генератора вертикальной развертки, которые подсоединены управляющими входами к выходу элемента задержки и соединены выходами с первыми входами соответственно первого и второго компараторов, подсоединенных вторыми входами соответственно к первой и второй входным шинам и подключенных выходами соответственно к первому и второму входам элемента совпадения, отличающееся тем, что, с целью повышения точности прогнозирования состояния систем управления, в него введены генератор синусоидальных колебаний подсоединенный первым и вторым управляющими входами к выходам соответственно элемента совпадения и элемента задержки, блок кодированного согласования, соединенный выходами с электроннолучевой трубкой, третий компаратор, подключенный выходом к третьему входу элемента совпадения и генератор пилообразного напряжения, причем блок кодированного согласования подсоединен входами к выходам генератора горизонтальной развертки, генератора вертикальнойгенератора пилообразного напряжения и к
развертки и генератора пилообразного на-первому входу третьего компаратора снабпряжений и к выходу генератора синусои-женного соединенной с его вторым входом
дальних колебаний, подключенному к входутретьей входной шиной.
| Устройство для прогнозирования состояний системы управления | 1973 |
|
SU487302A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для прогнозирования состояния системы управления | 1978 |
|
SU742710A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
