Изобретение относится к области приборостроения систем программного измерения и контроля состояния параметров контейнеров на пути их следования и может найти применение для повышения уровня безопасности транспортировки ценных и взрывоопасных грузов и посылок в помещениях с узкими проходами и дверными проемами.
Известны контейнеры RU 2090125, 1997; RU 2074362, 1997; SU 1744414, 1989; FR 2625800, 1988; US 3269741, 1966 и др., использование которых для транспортирования и временного хранения посылок, мешков и ящиков с письменной корреспонденцией, пачек печати, грузов вызывает большие производственные и технологические издержки [см. Почтовая связь: Справочник. / Гиль Г.К., Горохов В.В., Мацнев В.Н. и др. - М.: Связь, 1978, 440 с.], при этом транспортировка ценных и взрывоопасных грузов и посылок в помещениях с узкими проходами и дверными проемами невозможна.
В этой связи наиболее близким по конструктивным признакам является контейнер (см. Почтовая связь: Справочник. / Гиль Г.К., Горохов В.В., Мацнев В.Н. и др. - М.: Связь, 1978, с.352-353), состоящий из кузова, правой двери с запорным устройством, левой двери, платформы, являющейся днищем контейнера, фиксатора, закрепленного на платформе со стороны кузова, двух задних жестко закрепленных на платформе не имеющих возможности поворачиваться вокруг вертикальной оси колес и поворотной пары передних колес, закрепленных на общей горизонтальной оси, снабженной тормозным устройством для удерживания передних колес от проворачивания, соединенной шарнирно с платформой вертикальной стойкой, к которой крепится с возможностью поворота в вертикальной плоскости рулевая тяга, посредством которой осуществляется торможение, маневрирование контейнером при его установке на рабочее место или транспортное средство и транспортирование в сцепе при присоединении к фиксатору другого контейнера.
Недостатки прототипа заключены в том, что жесткое закрепление задних колес не позволяет им поворачиваться вокруг вертикальной оси при маневрировании контейнером. Это ограничивает маневренность и увеличивает радиус поворота контейнера, что затрудняет, а в ряде случаев делает невозможным использование контейнера в помещениях с узкими проходами и дверными проемами. При этом на пути следования контейнера у него нет средств для генерации и приема сообщений о контроле его состояния и фиксации момента и места несанкционированного доступа к содержимому контейнера.
Задачей, на решение которой направлено изобретение, является расширение функциональных возможностей контейнера.
Решение указанной задачи достигается тем, что предлагаемый способ и устройство для его осуществления основаны на использовании процесса генерации множества допустимых параметров состояния контейнера на пути его маршрута передвижения, при этом для каждой процедуры (или пароля) доступа формируют соответствующий образ нормального состояния параметров контейнера или его маску, а по имеющемуся образу процедуры (или пароля) доступа или его маске формируют сообщение о несанкционированном доступе к содержимому контейнера на любом промежутке или заданном интервале времени (Тi, i=1, 2, ...) эксплуатации контейнера, при этом измеряют основные параметры сигналов, возникающих в процессе интерактивного формирования параметров состояния контейнера и в процессе его эксплуатации, которые разбивают на две группы или на два канала измерения сигналов, первая группа сигналов или первый канал измерения характеризует независимые по времени интерактивные процессы контролирования состояния контейнера, например первая группа сигналов представляет набор наблюдаемых интерактивных процессов формирования образов параметров состояния контейнера на основе использования каналов сотовой связи, а вторая группа каналов измерений характеризует измеренные параметры состояния контейнера, при этом измеряют длительность каждого из данных процессов генерации и приема сигналов о состоянии контейнера, соответствующие интервалы времени (Ti, i=1, 2, ...) и значения рассогласований от заданных параметров состояния контейнера.
Для генерации и приема сигналов о месте несанкционированного доступа к содержимому контейнера используют систему глобальной навигации, значения координат которых корректируют на основе показаний локального электромагнитного компаса и передают по каналам сотовой связи и, при необходимости, передают на автономные локализаторы звуковые сообщения или команды на исполнительные устройства.
Сиганлы от локализаторов передаются в виде SMS или в режиме передачи данных (Data Transfer Mode), а идентификация автономных локализаторов производится по SIM-карте (Subscriber Identification Module), при этом для минимизации затрат на функционирования устройства доступа используют службу GPRS (General Packet Radio Service).
Сигналы к памяти ключей доступа к содержимому контейнера осуществляют по двум линиям: земляной и двунаправленной сигнальной на основе использования последовательного интерфейса.
Взаимодействие с устройством обеспечивается кратковременным касанием зонда (контактной площадки) с корпусом iButton.
Для обмена между носителем кода и считывателем кода использована однопроводная шина, работающая по протоколу "1-Wire".
Электронным ключом (носителем кода идентификации) является устройство iButton.
Для реализации предлагаемого способа предлагается устройство для генерации и приема сообщений о несанкционированном доступе к содержимому контейнера, содержащее блок формирования программно-задающих воздействий, блок многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления, блок навигации и управления основными параметрами состояния контейнера, содержащий последовательно соединенные блок электромагнитного компаса, блок автономного локализатора, содержащий систему глобального позиционирования (Global Positioning System - GPS) с приемной и передающей антенной и блоком вычисления координат (не показаны) и блок сотовой (мобильной) связи GSM (Global System for Mobile communication), состоящий из автономных локализаторов, которые принимают по сети мобильной связи GSM сообщения с автономных локализаторов, обрабатывают их и при необходимости передают на локализаторы звуковые сообщения или команды на исполнительные устройства, с которыми связаны локализаторы, первый выход блока навигации и управления основными параметрами состояния контейнера соединен с информационной шиной блока многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления, выход которого соединен с первым входом блока навигации и управления основными параметрами состояния контейнера, второй выход которого соединен с входом блока формирования программно-задающих воздействий, а третий выход - с третьим информационным входом блока электронного замка, первый выход которого соединен с управляющим входом блока многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления, второй - с исполнительным механизмом электромагнитной защелки запорного устройства контейнера, четвертый - со считывающим устройством прибора iButton, а пятый - с кнопкой открывания двери контейнера, при этом выход блока формирования программно-задающих воздействий соединен с информационной шиной блока многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления, к которой присоединены выходы датчиков внешнего и внутреннего контроля состояния контейнера, первый и второй выходы блока навигации и управления основными параметрами состояния контейнера объединены соответственно с выходом блока автономного локализатора и выходом блока сотовой (мобильной) связи, а первый и второй входы блока навигации и управления основными параметрами состояния контейнера объединены соответственно с первым входом блока автономного локализатора и антенным выходом блока сотовой (мобильной) связи.
При этом блок многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления содержит последовательно соединенные блок нормирующих устройств (НУ), коммутатор, блок АЦП, первое запоминающее устройство (ЗУ), блок интерполирования, блок преобразования, второе ЗУ, регистрирующее устройство (РУ), на выходе которого установлены маска, оптическая система и фотодатчик, выходом подключенный к входу блока формирования статистических характеристик анализируемого процесса сопровождения контейнера, первый выход которого соединен со вторым управляющим входом РУ, а второй выход с входом блока формирования импульсных воздействий, выход которого соединен с последовательно соединенными блоком синхронизации, блоком задания постоянных коэффициентов, блоком масштабирования и первой схемой формирования дискретных приращений, первый и второй выходы которой соединены соответственно с первым и вторым входами второго ЗУ, первая информационная шина которого объединена с первым управляющим входом РУ и с информационной шиной блока синхронизации, вторая информационная шина второго ЗУ соединена с информационным выходом схемы формирования адреса записи и информационным входом второй схемы формирования дискретных приращений, выход которой соединен с пятым входом блока преобразования, информационный вход схемы формирования адреса записи соединен с информационным выходом блока задания постоянных коэффициентов, вход которой соединен с управляющими входами первого ЗУ, первый вход первой схемой формирования дискретных приращений объединен с информационными входами блока интерполирования и блока выделения экстремума, первый выход которого соединен с первым входом блока преобразования и вторым входом первой схемой формирования дискретных приращений, второй выход блока выделения экстремума соединен с входом блока масштабирования, вторые вход и выход блока формирования статистических характеристик анализируемого процесса сопровождения контейнера объединены соответственно с управляющим входом и выходом блока многоканального измерения, контроля и регистрации основных параметров состояния контейнера.
Блок формирования статистических характеристик анализируемого процесса сопровождения контейнера содержит генератор горизонтальной развертки, генератор вертикальной развертки и генератор синусоидальных колебаний, первую, вторую и третью входные шины, первый, второй и третий компараторы, элемент совпадения, выход которого соединен с первыми управляющими входами генератора горизонтальной развертки, генератора вертикальной развертки и генератора синусоидальных колебаний, обеспечивая сохранение на их выходах сигналов, соответствующих входным сигналам, поступающим соответственно по первой, второй и третьей входным шинам, которые объединены с вторым входом блока формирования статистических характеристик анализируемого процесса сопровождения контейнера. Кроме того, сигнал с выхода элемента совпадения управляет электронным ключом, с выхода которого на выходную шину блока подается сигнал, характеризующий значение гипотезы о близости формируемого образа оценки состояния контейнера, и запускается элементом задержки. Выход элемента совпадения соединен со вторыми управляющими входами генератора горизонтальной развертки, генератора вертикальной развертки и генератора синусоидальных колебаний, выходы которых соединены с входом блока кодированного согласования, который содержит последовательно соединенные дешифратор, блок пассивных элементов согласования и шифратор. Первый вход и второй выход блока формирования статистических характеристик анализируемого процесса сопровождения контейнера объединен с входом и выходом электронного ключа, а первый выход - информационной шиной, которая объединена с выходом блока кодированного согласования. Предлагаемое изобретение поясняется чертежами.
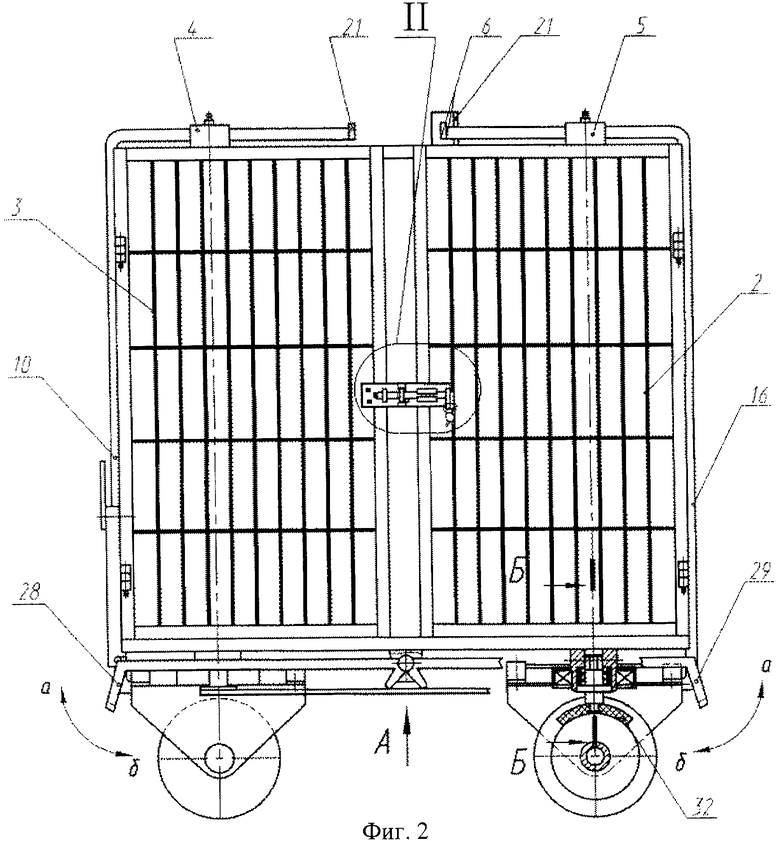
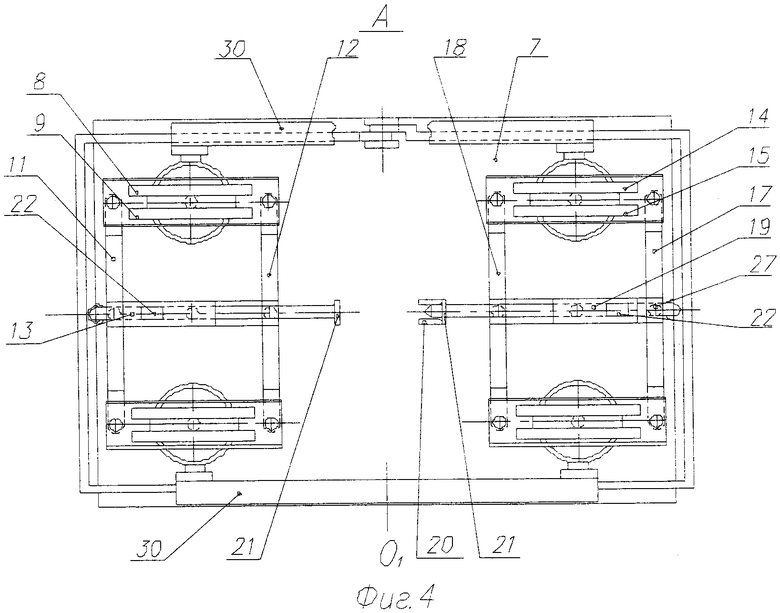
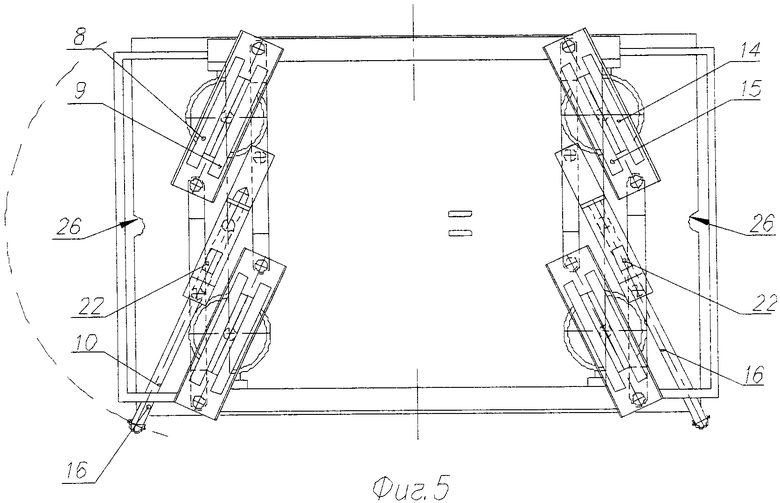
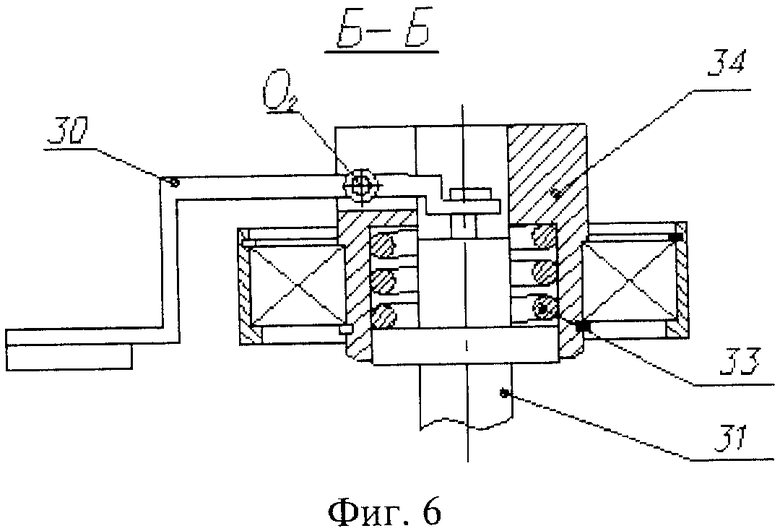
На фиг.1 представлен контейнер вид спереди, на фиг.2 - вид справа, на фиг.3 - вид слева, на фиг.4 - вид А фиг.2, на фиг.5 - то же (при максимальном повороте передних и задних колес), на фиг.6 - сечение Б-Б.
Контейнер состоит из кузова 1, правой двери 2 с запорным узлом II (см. фиг.7), левой двери 3, двух верхних поворотных вокруг вертикальной оси направляющих передней 4 и задней 5, верхнего неподвижно закрепленного на кузове направляющего фиксатора 6, платформы 7, являющейся днищем контейнера, двух пар передних жестко закрепленных на платформе 7 поворотных вокруг вертикальной оси колес 8 и 9, имеющих возможность независимого вращения вокруг горизонтальной оси, связанных с передней рулевой тягой 10 посредством шатунов 11 и 12 рычажного механизма двойного шарнирного параллелограмма и нижней передней поворотной вокруг вертикальной оси направляющей 13, шарнирно закрепленной на платформе 7 соосно с шарниром соединения с кузовом 1 верхней передней направляющей 4, обеспечивающих синхронизацию поворота колес 8, 9 и тяги 10, двух пар задних жестко закрепленных на платформе 7 поворотных вокруг вертикальной оси колес 14 и 15, имеющих возможность независимого вращения вокруг горизонтальной оси, связанных с задней рулевой тягой 16 посредством шатунов 17 и 18 рычажного механизма двойного шарнирного параллелограмма и нижней задней поворотной вокруг вертикальной оси направляющей 19, шарнирно закрепленной на платформе 7 соосно с шарниром соединения с кузовом 1 верхней задней направляющей 5, обеспечивающих синхронизацию поворота колес 14, 15 и тяги 16, а также нижнего неподвижно закрепленного на платформе 7 направляющего фиксатора 20, при этом оси поворота передних колес 8, 9 и задних колес 14, 15 лежат в одной плоскости с осями вращения колес, на платформе контейнера в одном из противоположных углов правой или левой двери установлен герметичный блок (поз.I на фиг.1), в котором размещено устройство для генерации и приема сообщений о несанкционированном доступе к содержимому контейнера (см. фиг.8), информационные входы которого соединены с датчиками контроля состояния контейнера, которые размещены внутри и снаружи контейнера, например, на боковых стенках контейнера, в качестве датчиков могут быть использованы, например, стандартные датчики контроля температуры, влажности, тензодатчики для измерения вибрации, емкостные датчики и др. (не показаны), а управляющие выходы устройства для генерации и приема сообщений о несанкционированном доступе к содержимому контейнера соединены с исполнительным механизмом электромагнитной защелки запорного устройства контейнера.
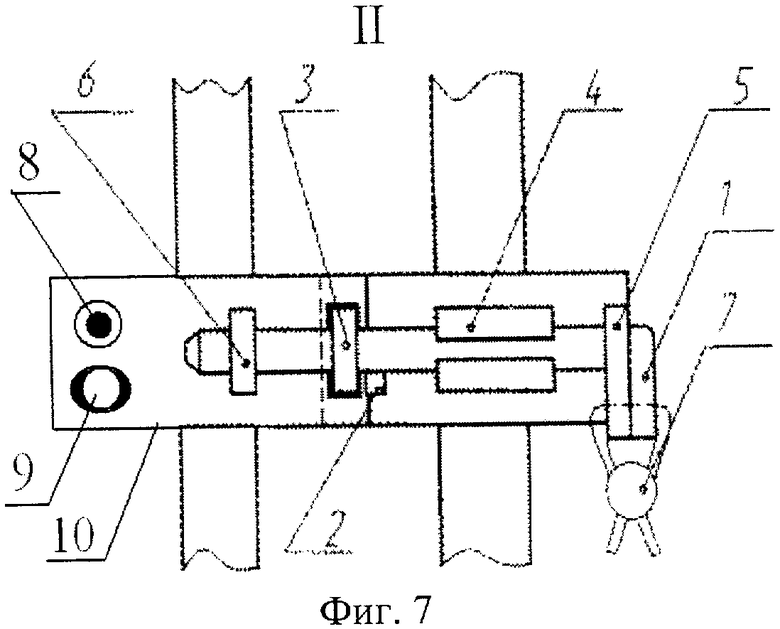
На основании запорного узла установлены кнопка открывания двери контейнера 8 (см. фиг.7) и считывающее устройства прибора iButton 9, электрически соединенные с устройством для генерации и приема сообщений о несанкционированном доступе к содержимому контейнера.
Рулевые тяги передняя 10 и задняя 16 (см. фиг.1-6) представляет собой вертикально расположенные скобы, имеющие возможность перемещения по верхним соответственно 4 и 5 и нижним соответственно 13 и 19 направляющим и жесткой фиксации в них с помощью упоров 21 и фиксаторов скоб 22, при этом в зафиксированном походном положении задняя рулевая тяга 16 входит своим верхним концом в верхний направляющий фиксатор 6, а нижним концом в нижний направляющий фиксатор 20. Датчики контроля состояния контейнера размещены внутри и снаружи контейнера, например, на боковых стенках контейнера, в качестве датчиков могут быть использованы, например, стандартные датчики контроля температуры, влажности, тензодатчики для измерения вибрации, емкостные датчики и др. (не показаны).
На фиг.7 приведен пример реализации запорного узла (на фиг.2 позиция II), который состоит из изогнутого стержня (1) с жестко закрепленным на нем упором (2), предотвращающим выпадение стержня из запорного устройства, имеющего возможность перемещения внутри скобы (3), горизонтальной направляющей (4) и фиксирующего упора правой двери (5), жестко закрепленных на правой двери, а также фиксирующего упора левой двери (6) с электромагнитной защелкой и исполнительным механизмом электромагнитной защелки запорного устройства контейнера, жестко закрепленного на левой двери соосно со скобой (3), горизонтальной направляющей (4) и фиксирующим упором правой двери (5), при этом на левой двери имеется прорезь для вхождения скобы (3), а изогнутый стержень (1) и фиксирующий упор правой двери (5) имеют соосные отверстия для закрепления в них троса или проволоки запорно-пломбировочного устройства (7), а также кнопка открывания двери контейнера 8 и считывающее устройство прибора iButton 9, установленные на основании запорного узла 10.
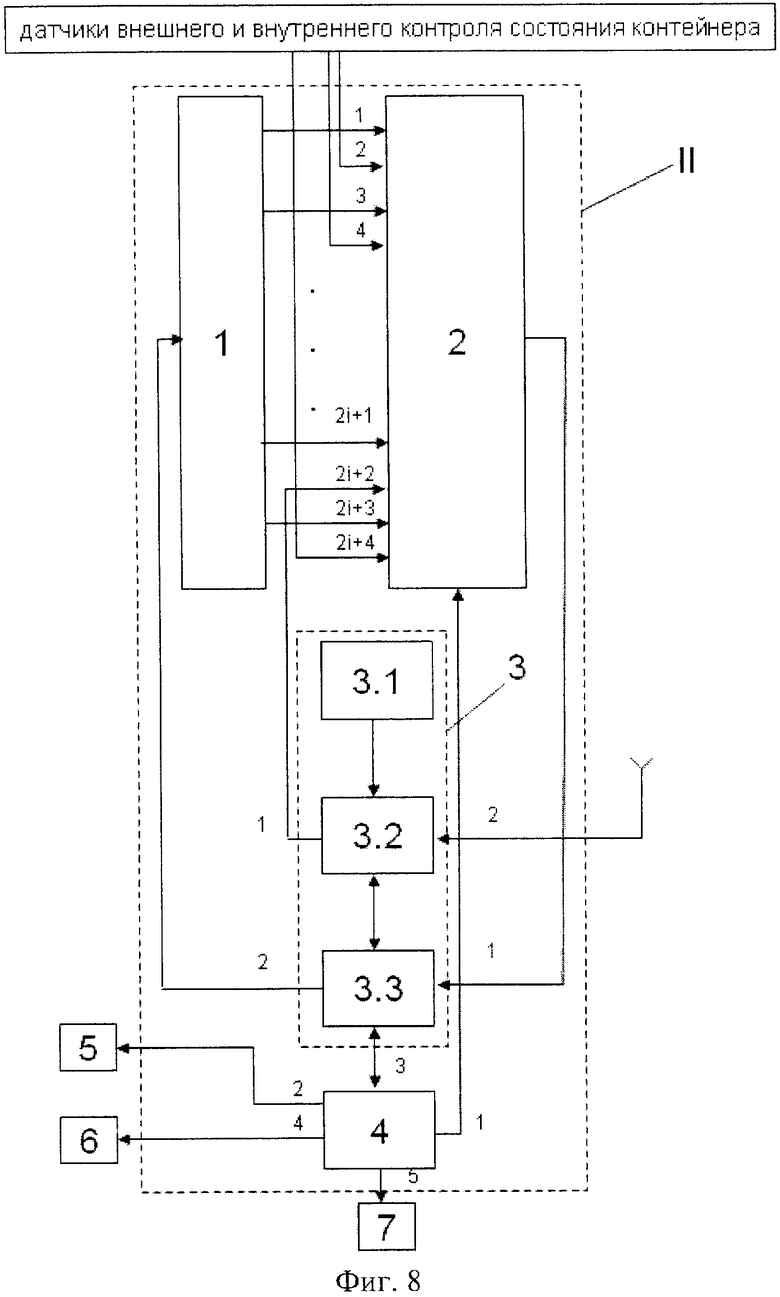
На фиг.8 приведен пример реализации устройства для генерации и приема сообщений о несанкционированном доступе к содержимому контейнера, содержащее 1 - блок формирования программно-задающих воздействий, 2 - блок многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления, 3 - блок навигации и управления основными параметрами состояния контейнера, содержащий последовательно соединенные 3.1 - блок электромагнитного компаса, 3.2 - блок автономного локализатора, содержащий систему глобального позиционирования (Global Positioning System - GPS) с приемной и передающей антенной и блоком вычисления координат (не показаны) и 3.3 - блок сотовой (мобильной) связи GSM (Global System for Mobile communication), состоящий из автономных локализаторов, которые принимают по сети мобильной связи GSM сообщения с автономных локализаторов, обрабатывают их и при необходимости передают на локализаторы звуковые сообщения или команды на исполнительные устройства, с которыми связаны локализаторы, первый выход блока навигации и управления основными параметрами состояния контейнера соединен с информационной шиной блока 2 многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления, выход которого соединен с первым входом блока навигации и управления основными параметрами состояния контейнера, второй выход которого соединен с входом блока формирования программно-задающих воздействий, а третий выход - с третьим информационным входом блока электронного замка 4, первый выход которого соединен с управляющим входом блока 2 многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления, второй - с 5 исполнительным механизмом электромагнитной защелки запорного устройства контейнера, четвертый - с 6 считывающим устройство прибора iButton, а пятый - с 7 кнопкой открывания двери контейнера, при этом выход блока 1 формирования программно-задающих воздействий соединен с информационной шиной блока 2 многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления, к которой присоединены выходы датчиков внешнего и внутреннего контроля состояния контейнера, первый и второй выходы блока 3 навигации и управления основными параметрами состояния контейнера объединены соответственно с выходом блока 3.2 автономного локализатора и выходом блока 3.3 сотовой (мобильной) связи, а первый и второй входы блока 3 навигации и управления основными параметрами состояния контейнера объединены соответственно с первым входом блока 3.2 автономного локализатора и антенным выходом блока 3.3 сотовой (мобильной) связи.
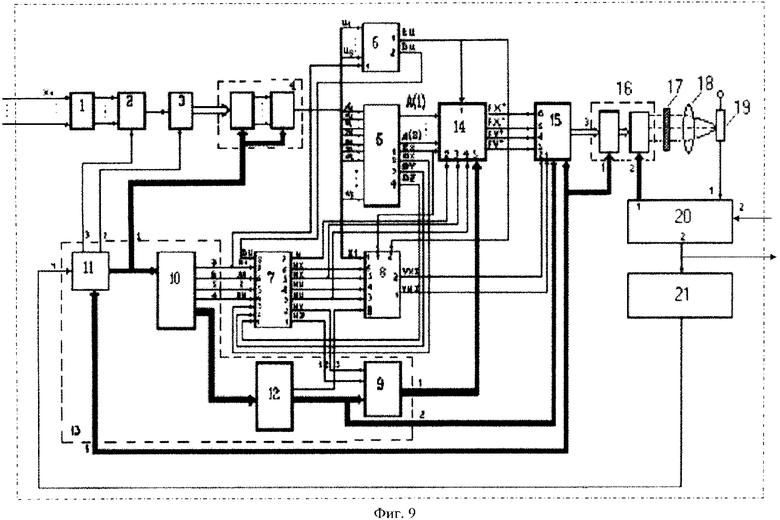
На фиг.9 приведен пример реализации блока 2 (см. фиг.8) многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления, который содержит последовательно соединенные блок 1 нормирующих устройств (НУ), коммутатор - 2, блок АЦП - 3, первое запоминающее устройство (ЗУ) - 4, блок 5 интерполирования, блок 14 преобразования, второе ЗУ 15, регистрирующее устройство (РУ) 16, на выходе которого установлены маска 17, оптическая система 18 и фотодатчик 19, выходом подключенный к входу блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера (фиг.10), первый выход которого соединен со вторым управляющим входом РУ 16, а второй выход с входом блока формирования импульсных воздействий 21 (фиг.11), выход которого соединен с последовательно соединенными блоком синхронизации 11, блоком задания постоянных коэффициентов 10, блоком масштабирования 7 и первой схемой формирования дискретных приращений 8, первый и второй выходы которой соединены соответственно с первым и вторым входами второго ЗУ 15, первая информационная шина которого объединена с первым управляющим входом РУ 16 и с информационной шиной блока синхронизации 11, вторая информационная шина второго ЗУ 15 соединена с информационным выходом схемы формирования адреса записи 12 и информационным входом второй схемы формирования дискретных приращений 9, выход которой соединен с пятым входом блока 14 преобразования, информационный вход схемы формирования адреса записи 12 соединен с информационным выходом блока задания постоянных коэффициентов 10, вход которой соединен с управляющими входами первого ЗУ 4, первый вход первой схемой формирования дискретных приращений 8 объединен с информационными входами блока 5 интерполирования и блока выделения экстремума 6, первый выход которого соединен с первым входом блока 14 преобразования и вторым входом первой схемой формирования дискретных приращений 8, второй выход блока выделения экстремума 6 соединен с входом блока масштабирования 7, вторые вход и выход блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера объединены соответственно с управляющим входом и выходом блока 2 (см. фиг.8) многоканального измерения, контроля и регистрации основных параметров состояния контейнера.
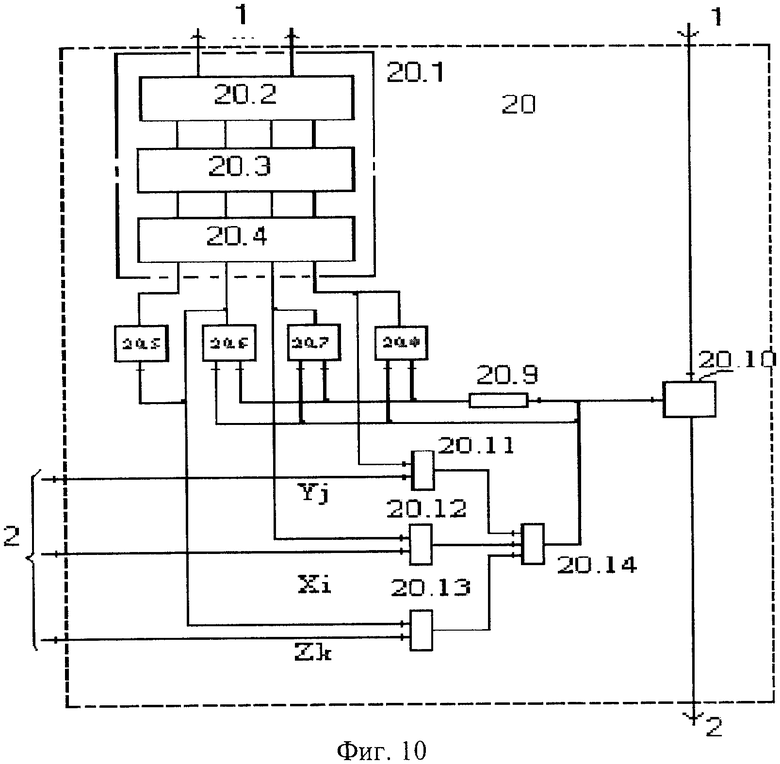
На фиг.10 приведен пример реализации блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера блока 2 (см. фиг.8) многоканального измерения, контроля и регистрации основных параметров состояния контейнера, который содержит генератор 20.7 горизонтальной развертки, генератор 20.8 вертикальной развертки и генератор 20.6 синусоидальных колебаний, первую, вторую и третью входным шинам Xi, Yj и Zk, первый, второй и третий компараторы 20.12, 20.11 и 20.13, элемент 20.14 совпадения, выход которого соединен с первыми управляющими входами генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний, обеспечивая сохранение на их выходах сигналов, соответствующих входным сигналам, поступающим соответственно по первой, второй и третьей входным шинам Xi, Yj и Zk, которые объединены с вторым входом блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера. Кроме того, сигнал с выхода элемента 20.14 совпадения управляет электронным ключом 20.10, с выхода которого на выходную шину 2 блока 20 подается сигнал, характеризующий значение гипотезы о близости формируемого образа оценки состояния контейнера, и запускает элементом 20.9 задержки. Выход элемента 20.14 совпадения соединен со вторыми управляющими входами генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний, выходы которых соединены с входом блока 20.1 кодированного согласования, который содержит последовательно соединенные дешифратор 20.2, блок пассивных элементов согласования 20.3 и шифратор 20.4. Первый вход и второй выход блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера объединен с входом и выходом электронного ключа 20.10, а первый выход блока 20 - информационная шина 1, объединена с выходом блока 20.1 кодированного согласования.
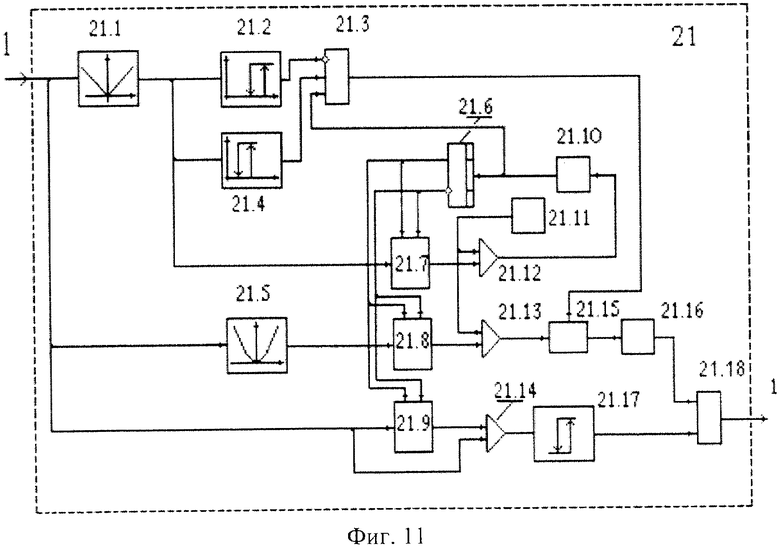
На фиг.11 приведен пример реализации блока 21 формирования импульсных воздействий в блоке 2 (см. фиг.8) многоканального измерения, контроля и регистрации основных параметров состояния контейнера, который содержит блок нормирования или определения модуля 21.1, релейные элементы 21.2, 21.4 и 21.17, блок возведения в квадрат 21.5, элементы И 21.3 и 21.18, триггер 21.6, блоки выборки-хранения 21.7, 21.8 и 21.9, сумматоры 21.12, 21.13 и 21.14, источник эталонных напряжений 21.11, формирователи импульсов 21.10 и 21.16, электронный ключ 21.15, управляющий вход которого соединен с выходом первого элемента И 21.3, входы которого соединены соответственно с выходом первого релейного элемента 21.2, выходом второго релейного элемента 21.4 и выходом первого формирователя импульсов 21.10, вход которого соединен с выходом первого сумматора 21.12, первый вход которого соединен с выходом первого блока выборки-хранения 21.7, а второй вход объединен с выходом источника эталонных напряжений 21.11 и вторым входом второго сумматора 21.13, первый вход которого соединен с выходом второго блока выборки-хранения 21.8, вход которого соединен с выходом блока возведения в квадрат 21.5, вход которого объединен с входом блока нормирования 21.1, с входом третьего блока выборки-хранения 21.9 и первым входом третьего сумматора 21.4, второй вход которого соединен с выходом третьего блока выборки-хранения 21.9, а выход через третий релейный элемент 21.17 с первым входом второго элемента И 21.18, второй вход которого соединен через последовательно соединенные второй формирователь импульсов 21.16 и электронный ключ 21.15 с выходом второго сумматора 21.13, при этом управляющие входы блоков выборки-хранения объединены с выходами триггера 21.6, вход которого соединен с выходом первого формирователя импульсов, а входы первого и второго релейного элементов объединены с входом первого сумматора и соединены через блок нормирования 21.1 к входу блока 21 формирования импульсных воздействий, выход которого объединен с выходом второго элемента И 21.18.
Способ генерации и приема сообщений о несанкционированном доступе к содержимому контейнера на основе применения предлагаемого устройства осуществляют следующим образом.
Значения сигналов, поступающих с датчиков контроля состояния контейнера, размещенных внутри и снаружи контейнера, например, на боковых стенках контейнера и сигналы на выходе блока 1 формирования программно-задающих воздействий (см. фиг.8) в процессе контроля состояния контейнера, поступают на входы нормирующего устройства 1 блока многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления (см. фиг.9). При этом эти сигналы условно разбивают на две группы. Для определенности будем полагать, что первая группа сигналов характеризует независимые от времени интерактивные процессы формирования основных параметров состояния контейнера в функции от места его нахождения, например первая группа сигналов представляет набор наблюдаемых интерактивных процессов формирования допустимых интервалов изменения параметров состояния контейнера в функции от его места нахождения по пути транспортировки, в общем случае они зависят от лица, принимающего решение (ЛПР), которое имеет доступ к устройству или каналу сотовой связи, а именно

Вторую группу сигналов представляют текущие параметры состояния контейнера, т.е. вторая группа каналов измерений характеризует группу зависимых сигналов, т.е. это сведения о фактических значения контролируемых параметров контейнера:

Следовательно, в рассматриваемом примере для упрощения изложения в первой группе будет три независимых канала измерений состояния интерактивных процессов формирования образов состояния контейнера, а во второй - 2n (в рассматриваемом случае восемь, т.к. n=3) зависимых каналов измерений состояния контейнер. При этом согласно предлагаемому способу необходимо хранить соответствующие оценки верхних и нижних значений результатов измерений по каждому каналу формирования образов состояния контейнера, т.е.  :
:


аналогично




На первом временном интервале (T1) осуществляется опрос следующих каналов НУ 1 (см. фиг.9): первого канала НУ 1 из первой группы независимых сигналов, на который поступает в рассматриваемом примере X(1); третьего канала - Y(1) и пятого - Z(1). Одновременно во второй группе каналов опрашивается первый канал, на который подается для измерения сигнал U(1). Измеренные в момент t1 значения после преобразования в блоке 3 запоминают в первом ЗУ 4. На такте t2 осуществляют опрос второго, третьего, пятого и восьмого каналов. На такте t3 осуществляется опрос первого, третьего, шестого и девятого каналов. На такте t4 осуществляют, опрос второго, третьего, шестого и десятого каналов. Для рассматриваемого примера этот процесс комбинаторного опроса каналов информационной шиной блока 2 (см. фиг.8) из разных групп и запоминание значений сигналов завершается за восемь тактов. Описанная последовательность операций интерактивного формирования образов состояния контейнера реализована на основе фиксации верхних {Х(2), Y(2), Z(2)} и нижних {X(1), Y(1), Z(1)} границ изменения амплитуд сигналов первой группы каналов измерения состояния информационной шины блока 2 многоканального измерения, контроля и регистрации основных параметров состояния контейнера и его систем управления.
При этом проекция, например, электронного луча на экране электроннолучевой трубки РУ 16 (см. фиг.9) передается на рабочую поверхность фотодатчика 19 через оптическую систему 18 и маску 17, выполненную так, что в трехмерном пространстве выделены области, соответствующие гипотезам о различных состояниях анализируемого процесса формирования состояния контейнера. Оптический коэффициент пропускания маски 17 имеет одно и то же значение для точек одной гипотезы и различное для различных гипотез близости образов, например, нормального состояния контейнера, в простейшем случае нормальное состояние контейнера определяется совпадение предписанных значений его текущих значений с заданными ЛПР символов. Маска 17 изготовлена так, что в пространстве координат (X, Y, Z) выделены области, соответствующие гипотезам близости образов нормального состояния параметров контейнера и оценивается на основе использования следующего соотношения:

где f(.) - любая интегрируемая по Риману функция или параметрическая зависимость, Xi, Yj и Zk - текущие значения переменных (или параметрических зависимостей) - входных переменных - (параметров) независимых (или зависимых) координат, о различных состояниях анализируемого (контролируемого) процесса формирования образов состояния контейнера, которые устанавливает ЛПР на основе использования средств сотовой связи блок 3 навигации и управления основными параметрами состояния контейнера.
Оптический коэффициент пропускания маски 17 (см. фиг.9) имеет одно и то же значение для точек, принадлежащих одной и той же гипотезе Нijk(.) близости, например, пароля к доступа к изменению параметров состояния контейнера, например открытию или его закрытию, и различное - для различных гипотез.
Данное свойство может быть реализовано на основе изменения интенсивности "почернения", густотой штриховки или частотой точек соответствующих участков маски при учете апертуры электронного луча и разрешающей способности фотоприемника. Это позволяет при входных величинах Xi, Yj и Zk (см. фиг.10) получать на выходе 2 блока 20 формирования статистических характеристик анализируемого процесса формирования образов состояния контейнера с амплитудой, равной гипотезе Нijk(.), и с частотой, определяемой параметрами соответствующих генераторов развертки.
При попадании электронного луча на экран электронно-лучевой трубки в определенное положение (соответствующее координатам или данным) на входах блока 20 - Xi, Yj и Zk (см. фиг.10) сигналы генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний превышают входные сигналы, поступающие соответственно по первой, второй и третьей входным шинам Xi, Yj и Zk, что приводит к появлению сигналов на выходах первого, второго и третьего компараторов 20.12, 20.11 и 20.13, вызывающих срабатывание элемента 20.14 совпадения. Сигнал с выхода элемента 20.14 совпадения поступает на первые управляющие входы генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний, обеспечивая сохранение на их выходах сигналов, соответствующих входным сигналам, поступающим соответственно по первой, второй и третьей входным шинам Xi, Yj и Zk. Кроме того, сигнал с выхода элемента 20.14 совпадения открывает ключ 20.10, с выхода которого на выходную шину 2 блока 20 подается сигнал, характеризующий значение гипотезы Нijk(.). Через интервал времени, определяемый элементом 20.9 задержки, сигнал элемента 20.14 совпадения поступает на вторые управляющие входы генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний, что приводит к исчезновению сигналов на их выходах. При этом исчезают сигналы на выходах первого, второго и третьего компараторов 20.12, 20.11 и 20.13 и элемента 20.14 совпадения, а цикл сканирования, например, экрана электронно-лучевой трубки или ПЗС матрицы РУ 16 повторяется.
Процесс формирования периода и длительности следования управляющих воздействий на выходе 1 блока 21 (см. фиг.11) рассмотрим для случая, когда на его входе 1 абсолютное значение гипотезы о соответствии сформированного образа состояния контейнера  где Δн/2 - зона срабатывания первого релейного элемента 21.2 и соответствующее ей нормированное значение
где Δн/2 - зона срабатывания первого релейного элемента 21.2 и соответствующее ей нормированное значение  . Предполагаем, что нормирование текущих значений гипотезы Нijk(.) (или ошибки - e(t)) осуществляется с коэффициентом Δ=Δн/2. Пусть в исходном положении триггер 21.6 находится в единичном состоянии, тогда с блока 21.7 выборки-хранения поступает напряжение
. Предполагаем, что нормирование текущих значений гипотезы Нijk(.) (или ошибки - e(t)) осуществляется с коэффициентом Δ=Δн/2. Пусть в исходном положении триггер 21.6 находится в единичном состоянии, тогда с блока 21.7 выборки-хранения поступает напряжение

на один из входов сумматора 21.12, на второй вход которого поступает постоянное напряжение (Е) от источника 21.11 эталонных напряжений. В результате на вход первого формирователя 21.10 импульсов подается постоянное напряжение Uфi=Ui+Е.
Постоянная составляющая Е может быть выбрана, например, из интервала значений с нижней границей, определяемой длительностью выполнения самой продолжительной последовательности операций преобразований (обработки) в блоках 1÷15 (фиг.9) и верхней границей, определяемой, например, как 1/(Kf*Fmax), где Fmax - максимальная частота изменения значений гипотез Hijk(.), Kf - постоянный коэффициент, который согласно теореме отсчетов во временном представлении непрерывных сигналов в дискретной форме можно установить ≥2. В этой связи верхняя граница значений данного интервала может быть априорно выбрана из необходимого условия адекватности представления непрерывного сигнала своими дискретными значениями непосредственно в процессе формирования образа вектора оценки состояния контейнера. Это позволяет обеспечить измерение и обработку значений соответствующих сигналов гипотез Hijk(.) с наименьшей потерей информации на любом этапе сопровождения соответствующих состояний контейнера и его параметров. Далее в соответствии с Uфi на выходе формирователя 21.10 импульсов будет сформирован импульс длительностью Тi=Кфi*Uфi, где Кфi - коэффициент передачи формирователя 21.10 импульсов.
Во время действия данного периода Ti в блоке 21.7 формируется

В конце периода Ti формирователь 21.10 импульсов устанавливает триггер 21.6 в следующее (например, нулевое) состояние. Описанные выше последовательности операций непрерывно повторяются в функциональной зависимости от изменения e(t), на основе которой определяется эффективность процесса формирования и оценки образов состояния контейнера на соответствующем этапе его транспортировки и доступа к его содержимому.
В момент окончания каждого периода Ti и начала следующего Ti+1, составляющих незначительный по продолжительности промежуток времени, формируется сигнал, достаточный для отключения электронного ключа 21.15. Этим обеспечивается требуемая степень синхронизации между началом момента формирования периода управляющих воздействий при формировании образов состояний контейнера, например, при смене пароля санкционированного доступа к содержимому контейнера или коррекции, уточнении образов параметров состояния контейнера на пути его следования в формирователе 21.10 и длительности импульса в формирователе 21.16 для всех Тi, i=1, 2, ..., n. Формирование напряжений на входе второго формирователя 21.16 импульсов реализовано по схеме, аналогичной вышеописанной на входе формирователя 21.10 импульсов, с тем лишь отличием, что формирование длительности выходных импульсов осуществляется в соответствии со значением оценки интегрального изменения квадрата нормированного сигнала гипотез Hijk(.) и во все периоды Тi, для которых 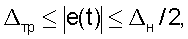 где Δтр - зона нечувствительности релейного элемента 21.4, устанавливаемая на основе критерия точности воспроизведения (распознавания, прогнозирования и т.п.) текущих значений сигнала гипотез Нijk(.) по результатам процесса формирования параметров состояния контейнера. Формирование каждого периода Тi осуществляется на основе последовательности операций (Кфi*Е), априорных по отношению к динамике изменения значений соответствующих сигналов гипотез Нijk(.), и корректируется текущими значениями интегральных оценок нормированной ее оценки, полученными на предшествующем периоде дискретизации времени или процесса формирования образов состоянии контейнера.
где Δтр - зона нечувствительности релейного элемента 21.4, устанавливаемая на основе критерия точности воспроизведения (распознавания, прогнозирования и т.п.) текущих значений сигнала гипотез Нijk(.) по результатам процесса формирования параметров состояния контейнера. Формирование каждого периода Тi осуществляется на основе последовательности операций (Кфi*Е), априорных по отношению к динамике изменения значений соответствующих сигналов гипотез Нijk(.), и корректируется текущими значениями интегральных оценок нормированной ее оценки, полученными на предшествующем периоде дискретизации времени или процесса формирования образов состоянии контейнера.
При этом в предлагаемой реализации устройства для генерации и приема сообщений о несанкционированном доступе к содержимому контейнера блок 3 навигации и управления основными параметрами состояния контейнера, включающего последовательно соединенные 3.1 - блок электромагнитного компаса, 3.2 - блок автономного локализатора, содержащий систему глобального позиционирования (Global Positioning System - GPS) с приемной и передающей антенной и блоком вычисления координат (не показаны) и 3.3 - блок сотовой (мобильной) связи GSM (Global System for Mobile communication), состоящий из автономных локализаторов, которые принимают по сети мобильной связи GSM- сообщения с автономных локализаторов, обрабатывают их и при необходимости передают на локализаторы звуковые сообщения или команды на исполнительные устройства, с которыми связаны локализаторы, первый выход блока навигации и управления основными параметрами состояния контейнера. Т.е. в предлагаемой реализации связей автономных локализаторов (в различных аналогах они по-разному называются) общим является то, что автономный локализатор содержит GPS-приемник с антенной и блоком вычисления координат, GSM-приемопередатчик с антенной, микропроцессорный блок контроля и памяти, соединенный с GPS-блоком вычисления координат и GSM-приемопередатчиком, блок питания и порт ввода программ в микропроцессорный блок контроля, подзарядки блока питания и соединения, при необходимости, автономного локализатора с исполнительными устройствами и датчиками, установленными на подвижном объекте. Таким образом, общие принципы действия автономного локализатора: GPS-приемник принимает информацию со спутников глобальной системы позиционирования, эта информация обрабатывается блоком вычисления координат и поступает в микропроцессорный блок контроля и памяти, которая корректируется на основе показаний блока 3.1 электромагнитного компаса. По командам блока контроля и памяти с помощью GSM-приемопередатчика передается по сети мобильной связи на центр мониторинга и контроля сообщение о координатах и состоянии параметров контейнера ЛПР. Сообщения от локализаторов передаются в виде SMS или в режиме передачи данных (Data Transfer Mode), a идентификация автономных локализаторов производится по SIM-карте (Subscriber Identification Module). С точки зрения минимизации затрат на функционирование системы наиболее целесообразно использовать службу GPRS (General Packet Radio Service). При этом считывающее устройство 6 прибора iButton представляет собой автономное микроконтроллерное устройство с энергозависимой памятью, например, может быть использован один из двух типов приборов iButton - DS1991 или DS1994 (фирмы Dallas-Maxim Corp.) Указанный тип носителя содержит круглый стальной корпус, в который помещен кристалл памяти, микроконтроллер и миниатюрная литиевая батарейка. Помимо защитных свойств стальной корпус также выполняет функцию электрических контактов. Доступ к содержимому памяти прибора осуществляется только через две линии: земляную и двунаправленную сигнальную по двунаправленному оригинальному последовательному интерфейсу. Взаимодействие с прибором обеспечивается кратковременным касанием зонда (контактной площадки) с корпусом iButton. Для обмена между носителем кода и считывателем кода может быть использована однопроводная шина, работающая по протоколу "1-Wire". Электронным ключом (носителем кода идентификации) является устройство iButton (http://rs232.ru/docs/1wire/doc009.html).
Таким образом, в моменты окончания каждого периода Ti и начала следующего Ti+1, составляющие незначительный по продолжительности промежуток времени, формируется сигнал, достаточный для отключения электронного ключа 21.15 (см. фиг.11). Этим обеспечивается требуемая степень синхронизации между началом момента формирования периода управляющих воздействий при формировании образов состояний контейнера, например, при смене пароля санкционированного доступа к содержимому контейнера или коррекции, уточнении образов параметров состояния контейнера на пути его следования в формирователе 21.10 и длительности импульса в формирователе 21.16 для всех Тi, i=1, 2, ..., n. При этом формирование напряжений на входе второго формирователя 21.16 импульсов реализован по схеме, аналогичной вышеописанной на входе формирователя 21.10 импульсов, с тем лишь отличием, что формирование длительности выходных импульсов осуществляется в соответствии со значением оценки интегрального изменения квадрата нормированного сигнала гипотез Нijk(.) о состоянии параметров контейнера и во все периоды Ti, для которых  , где Δтр - зона нечувствительности релейного элемента 21.4, устанавливаемая на основе критерия точности воспроизведения (распознавания, прогнозирования состояния реальных параметров контейнера и того помещения, в котором он находится) текущих значений сигнала гипотез Нijk(.) по результатам процесса формирования параметров состояния контейнера в реальном масштабе времени. Формирование каждого периода Тi осуществляется на основе последовательности операций (Кфi*Е), априорных по отношению к динамике изменения значений соответствующих сигналов гипотез Нijk(.), и корректируется текущими значениями интегральных оценок нормированной ее оценки, полученными на предшествующем периоде дискретизации времени или процесса формирования образов состоянии контейнера.
, где Δтр - зона нечувствительности релейного элемента 21.4, устанавливаемая на основе критерия точности воспроизведения (распознавания, прогнозирования состояния реальных параметров контейнера и того помещения, в котором он находится) текущих значений сигнала гипотез Нijk(.) по результатам процесса формирования параметров состояния контейнера в реальном масштабе времени. Формирование каждого периода Тi осуществляется на основе последовательности операций (Кфi*Е), априорных по отношению к динамике изменения значений соответствующих сигналов гипотез Нijk(.), и корректируется текущими значениями интегральных оценок нормированной ее оценки, полученными на предшествующем периоде дискретизации времени или процесса формирования образов состоянии контейнера.
Предлагаемое решение апробировано в процессе сопровождения ценных грузов на сложных железнодорожных направлениях. Предлагаемое решения изобретения может быть использовано в иных транспортных системах и технологических процессах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГИСТРАЦИИ СОСТОЯНИЯ ПАРАМЕТРОВ КОНТЕЙНЕРА ПО ПУТИ ЕГО СЛЕДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325621C1 |
| СПОСОБ РАСПРЕДЕЛЕННОГО МОНИТОРИНГА КОНТЕЙНЕРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2329470C1 |
| СИСТЕМА ЗАГРУЗКИ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕР | 2008 |
|
RU2381166C2 |
| КОНТЕЙНЕР | 2006 |
|
RU2323147C1 |
| КОНТЕЙНЕР | 2006 |
|
RU2304552C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗАГРУЗОЧНЫМ УСТРОЙСТВОМ ДЛЯ УКЛАДКИ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕР | 2008 |
|
RU2364565C1 |
| СПОСОБ УКЛАДКИ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕР | 2008 |
|
RU2377174C1 |
| СПОСОБ УПРАВЛЕНИЯ СОРТИРОВОЧНОЙ УСТАНОВКОЙ С УКЛАДКОЙ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕРЫ | 2011 |
|
RU2472594C1 |
| СПОСОБ ИНТЕРАКТИВНОГО ПОИСКА В РАСПРЕДЕЛЕННЫХ ВЫЧИСЛИТЕЛЬНЫХ СЕТЯХ И ИНФОРМАЦИОННО-ПОИСКОВАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2329533C2 |
| УСТРОЙСТВО ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2448029C1 |
Изобретение относится к области приборостроения систем программного измерения и контроля состояния параметров контейнеров на пути их следования и отстоя и может найти применение для повышения уровня безопасности транспортировки и хранения ценных и взрывоопасных грузов и посылок в контейнерах, в том числе в помещениях с узкими проходами и дверными проемами. Способ включает процесс генерации множества допустимых параметров состояния контейнера на пути его маршрута передвижения, при этом для каждой процедуры (или пароля) доступа формируют соответствующий образ нормального состояния параметров контейнера или его маску, а по имеющемуся образу процедуры (или пароля) доступа или его маске формируют сообщение о несанкционированном доступе к содержимому контейнера на любом промежутке или заданном интервале времени эксплуатации контейнера. Техническим результатом является расширение функциональных возможностей контейнера. 2 н. и 3 з.п. ф-лы, 11 ил.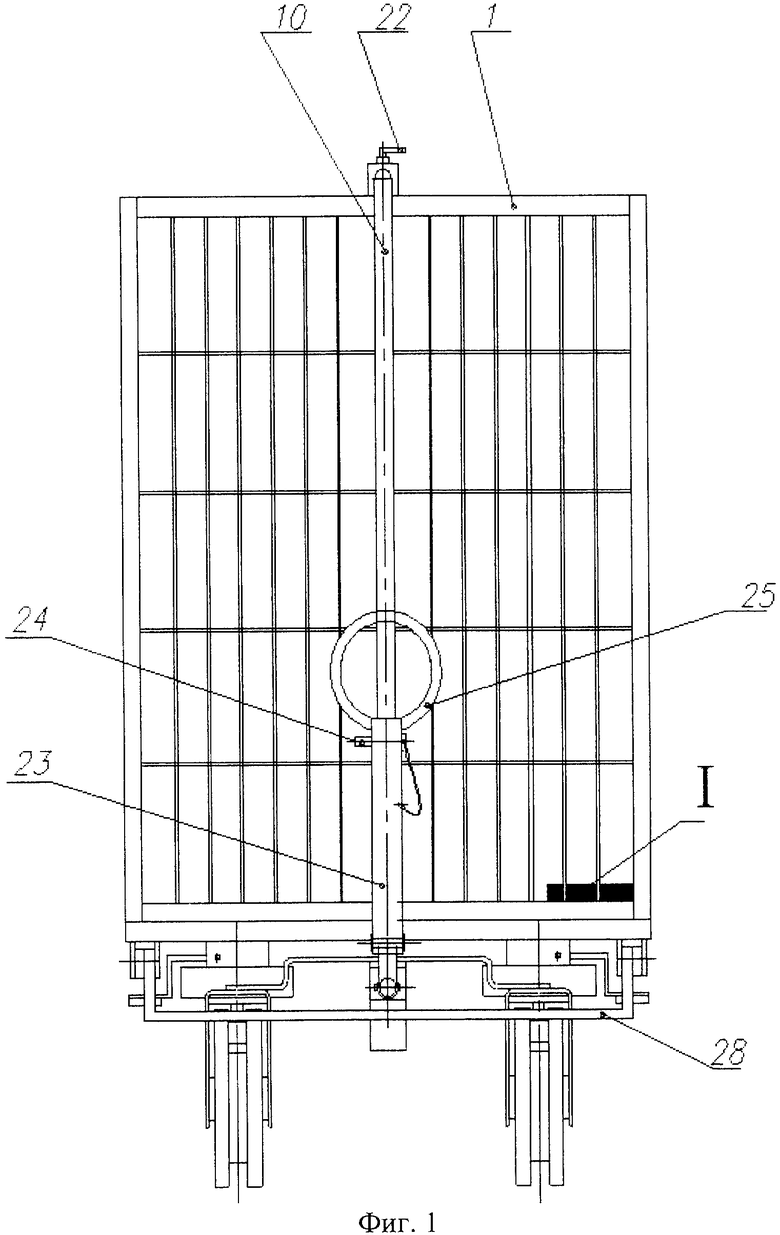
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2001 |
|
RU2177647C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2264934C1 |
| ВЗБИВАЛЬНЫЙ ДИСК ДЛЯ КУХОННОГО ПРИБОРА | 2003 |
|
RU2336011C2 |
| WO 9942969 А1, 26.08.1999. | |||

