Изобретение относится к области приборостроения систем программного сопровождения/мониторинга (измерения и контроля) состояния параметров контейнеров по пути их следования и может найти применение для повышения уровня безопасности транспортировки ценных и взрывоопасных грузов и посылок.
Известны контейнеры RU 2090125, 1997; RU 2074362, 1997; SU 1744414, 1989; FR 2625800, 1988; US 3269741, 1966 и др., использование которых для транспортирования и временного хранения посылок, мешков и ящиков с письменной корреспонденцией, пачек печати, грузов вызывает большие производственные и технологические издержки [см. Почтовая связь: Справочник / Гиль Г.К., Горохов В.В., Мацнев В.Н. и др. - М.: Связь, 1978, 440 с.]. При этом мониторинг процессов транспортировки ценных и взрывоопасных грузов и посылок осуществляют на основе использования программно-технических комплексов состоящих из автоматизированных рабочих мест операторов, объединенных в локальную или распределенную вычислительную сеть, соединенную с основным и резервным серверами, которые, в свою очередь, соединены в сеть с телекоммуникационными серверами (см. например, SU 525104 А1, 15.08.1976; SU 1550528 A1, 15.03.1990; SU 1765841 A1, 30.09.1992; RU 2023295 C1, 15.11.1994; US 20010027404 A1, 04.10.2001; JP 4054685 A, 21.02.1992; RU 2199778 A1, 27.02.2003; RU 2003129127 A, 27.03.2005). В основе работы вышеперечисленных систем использован способ, включающий генерацию упорядоченных во времени интерактивных процедур, связанных с формированием поисковых запросов о состоянии контролируемого объекта на основе формирования соответствующих запросов, учитывающих специфику контролируемого процесса. При этом каждая из соответствующих интерактивных процедур мониторинга использует сведения о текущих ситуациях лишь в ограниченном пространстве признаков поисковых запросов. При этом низкая производительность данного способа обусловлена потерей времени, затрачиваемого на повышение объективности оценки состояния контролируемого объекта из-за плохо формализуемых ситуаций мониторинга контейнеров в пространстве признаков, которые зависят от транспортируемого груза. Последний недостаток обусловлен тем, что данный способ не предусматривает средств адаптации его использования в современных распределенных интерактивных локальных или глобальных клиент-серверных системах.
Достижению требуемого технического результата во всех приведенных аналогах, включая соответствующий способ интерактивного мониторинга, препятствует то, что ни одно из них не может быть использовано для распределенных вычислительных систем автоматизации процессов мониторинга состояния контейнеров на всем пути их следования.
Задачей изобретения является совершенствование интерактивных процессов мониторинга состояния контейнеров на основе использования распределенных вычислительных систем и сетей, а также повышение точности, достоверности и объективности результатов мониторинга состояния контейнеров в процессе их транспортировки, на основе более широкого использования новых информационных технологий и средств автоматизации, за счет расширения функциональных возможностей существующих технических средств и повышения эффективности соответствующих интерактивных (диалоговых) систем мониторинга состояния перемещаемых объектов и ценных грузов.
Для решения поставленной задачи предложен способ распределенного сопровождения/мониторинга контейнеров и система для его осуществления.
Способ распределенного мониторинга состояния контейнеров, включает совмещение процессов формирования интерактивных запросов о состоянии контейнеров и цифровых преобразований результатов измерений соответствующих сигналов по каждому из каналов формирования запросов о состоянии контейнеров, при этом предварительно входные сигналы запросов разделяют (разбивают, выделяют, группируют и т.п.) как минимум на две группы, при этом в первую группу относят независимые от времени интерактивные запросы о состоянии контейнеров, а во вторую - зависимые от состояния контейнеров, при этом устанавливают каналы измерения, соответственно независимых βk(t) и зависимых Uij (p)=fij[βk(t)] сигналов поисковых запросов о состоянии контейнеров, где t - время, i, j=1, 2, fij[βk(.)] - некоторая нелинейная зависимость от βk(t), k=1, 2,...,n, затем осуществляют комбинаторный опрос, например перебор сочетаний, соответствующего числа каналов измерения, измерение параметров (амплитуды и длительности) сигналов по каждому каналу формирования поисковых запросов о состоянии контейнеров, при этом измерение сигналов из первой группы осуществляют на основе значений разброса их
нижних  и верхних
и верхних 
пределов изменения с учетом допустимой, например абсолютной, погрешности измерения параметров состояния контейнера на соответствующем временном интервале  измерения для всех
измерения для всех  , i1=1, 2,..., при этом длительность временного интервала
, i1=1, 2,..., при этом длительность временного интервала  формирования интерактивных поисковых запросов о состоянии контейнеров корректируют на основе значений сигнала рассогласования о близости контролируемого параметра состояния контейнера к установленному или заранее предписанному содержанию информационному запросу или информационной потребности на предшествующем интервале
формирования интерактивных поисковых запросов о состоянии контейнеров корректируют на основе значений сигнала рассогласования о близости контролируемого параметра состояния контейнера к установленному или заранее предписанному содержанию информационному запросу или информационной потребности на предшествующем интервале  контроля состояния параметров контейнера, при этом измеряют разность общего времени простоя контейнера при «участковой» (tc) системе передвижения контейнеров (когда контейнер имеет сортировку на каждом попутном сортировочном пункте) и времени простоя контейнеров (tmp) при проследовании контейнеров транзитом за вычетом времени накопления (tнак) контейнеров, вызванного задержкой контейнеров под накоплением, например, на всех попутных станциях, имеющих сортировочные контейнерные площадки, контролируют общую экономию времени при сопровождении N контейнеров по следующей зависимости:
контроля состояния параметров контейнера, при этом измеряют разность общего времени простоя контейнера при «участковой» (tc) системе передвижения контейнеров (когда контейнер имеет сортировку на каждом попутном сортировочном пункте) и времени простоя контейнеров (tmp) при проследовании контейнеров транзитом за вычетом времени накопления (tнак) контейнеров, вызванного задержкой контейнеров под накоплением, например, на всех попутных станциях, имеющих сортировочные контейнерные площадки, контролируют общую экономию времени при сопровождении N контейнеров по следующей зависимости:

где n/ и n// - число контейнеров, проходящих контейнерные площадки без переработки и с переработкой,
tci - время простоя i-го контейнера при «участковой» системе передвижения контейнеров,
 и
и  - время простоя i-го контейнера при «участковой» системе передвижения контейнеров без его переработки и с переработкой,
- время простоя i-го контейнера при «участковой» системе передвижения контейнеров без его переработки и с переработкой,
tнакi - время накопления i-го контейнера при «участковой» системе передвижения контейнеров.
При этом в процессе мониторинга состояния контейнеров:
в качестве зависимых каналов на каждом i-м уровне мониторинга используют интерфейсы жестких, гибких или оптических дисков;
в качестве независимых каналов на каждом i-м уровне мониторинга используют интерфейс последовательного порта или сетевой интерфейс;
в качестве независимых каналов на каждом i-м уровне мониторинга используют интерфейс последовательного порта или сетевой интерфейс, а в качестве зависимых каналов используют интерфейсы жестких, гибких или оптических дисков.
Для реализации предлагаемого способа предлагается информационно-измерительная система для мониторинга состояний контейнеров, в которой на каждом уровне обработки результатов мониторинга состояний контейнеров (МСК) содержится Sl,q, интерактивных программируемых устройств МСК, где Sl,q, l=0, 1,...,L (ПЭВМ, например, IBM PC, а также любое другое устройство, имеющее стандартный интерфейс RS-232C, ИРПС, USB и т.п.); q=1, 2,..., Ql, L - число уровней MCK, Ql - число многоканальных интерактивных программируемых устройств MCK (далее для краткости - ИПУ MCK) на l-уровне, каждое из Sl,q ИПУ MCK l-уровня соединено, по крайней мере, с одним ЦПУ MCK (l-1)-го уровня, с двумя ИЛУ MCK l-уровня и двумя ИГГУ MCK (l+1)-го уровня, при этом каждое из Sl,q ИЛУ MCK содержит: блок системной памяти, аппаратно-программные блоки (АПБ), соответственно, АПБ первого аудиоинтерфейса (в простейшем случае микрофон с усилителем), АПБ приемопередатчика (например, блок сотовой/мобильной связи GSM - Global System for Mobile communication, состоящий из автономных локализаторов GSM), АПБ второго аудиоинтерфейса (в простейшем случае телефон с усилителем), АПБ глобального позиционирования (Global Positioning System - GPS) с приемной и передающей антенной и блоком вычисления координат, АПБ процессора мониторинга состояния контейнеров, АПБ видео адаптера, АПБ интерфейса жестких дисков, АПБ интерфейса гибких дисков, АПБ интерфейса оптических дисков, АПБ интерфейса последовательного порта, АПБ сетевого интерфейса, которые объединены системной шиной ЦПУ МКС.
При этом АПБ процессора ИЛУ МКС содержит последовательно соединенные блок нормирующих устройств (НУ), коммутатор, АЦП, первое ЗУ, блок интерполирования, блок выделения экстремума, блок масштабирования, первую схему формирования дискретных приращений, вторую схему дискретных приращений, блок задания постоянных коэффициентов, блок синхронизации поисковых запросов, схему формирования адреса записи поисковых запросов, блок управления поисковыми процессами, блок преобразования, второе ЗУ, регистрирующее устройство (РУ), на выходе которого установлены маска, оптическая система и фотодатчик, выходом подключенный к входу блока формирования статистических характеристик анализируемого поискового процесса, первый выход которого соединен со вторым входом РУ, а второй выход с входом блока формирования импульсных воздействий.
Отличительные признаки способа мониторинга состояния контейнеров и информационно-измерительная система для его реализации позволяют повысить эффективность интерактивных процессов мониторинга состояния контейнеров непосредственно в процессе их транспортировки на основе использования реальных динамических характеристик распределенных вычислительных систем и сетей, при этом предоставляется возможность повысить точность, достоверность и объективность принимаемых решений, на основе более широкого использования новых информационных технологий и средств автоматизации, за счет расширения функциональных возможностей существующих технических средств и повышения эффективности соответствующих интерактивных (диалоговых) систем и подсистем мониторинга распределенных подвижных объектов и ценных грузов.
Предлагаемое изобретение поясняется чертежами.
На фиг.1 показана структура информационно-измерительная система для мониторинга состояний контейнеров.
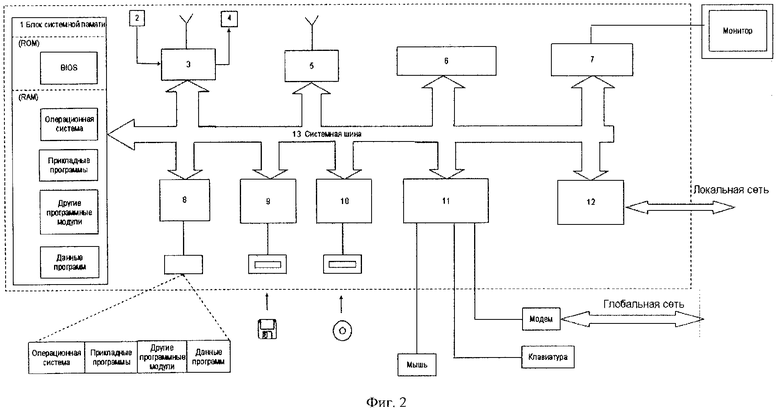
На фиг.2 - структура интерактивного программируемого устройства (ИПУ) мониторинга состояний контейнеров (МСК).
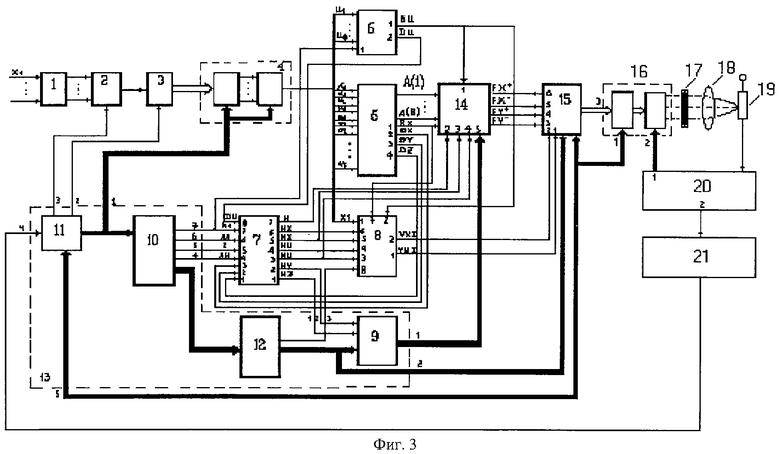
На фиг.3 - пример реализации аппаратного программного блока (АПБ) процессора ИПУ МКС.
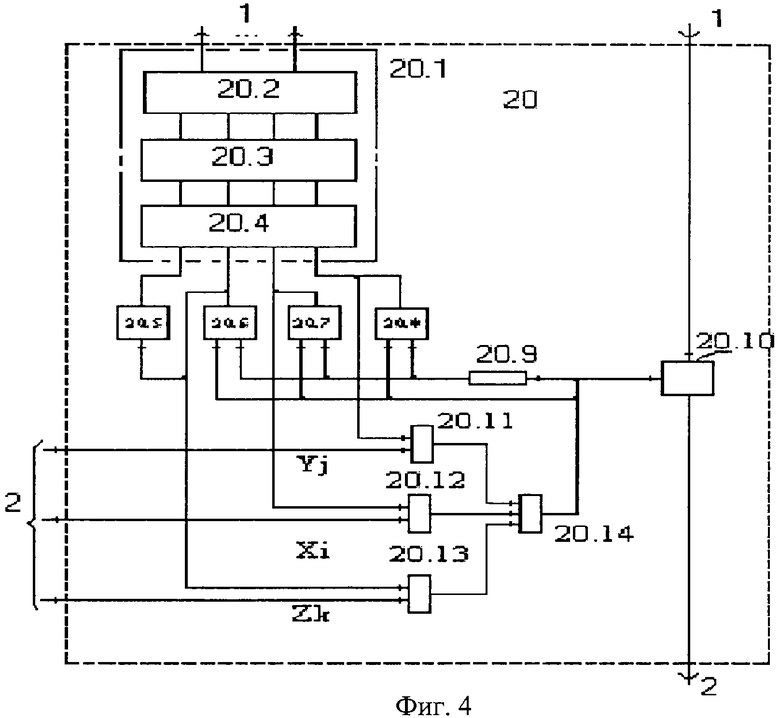
На фиг.4 - пример реализации блока формирования статистических характеристик АПБ процессора ИПУ МКС.
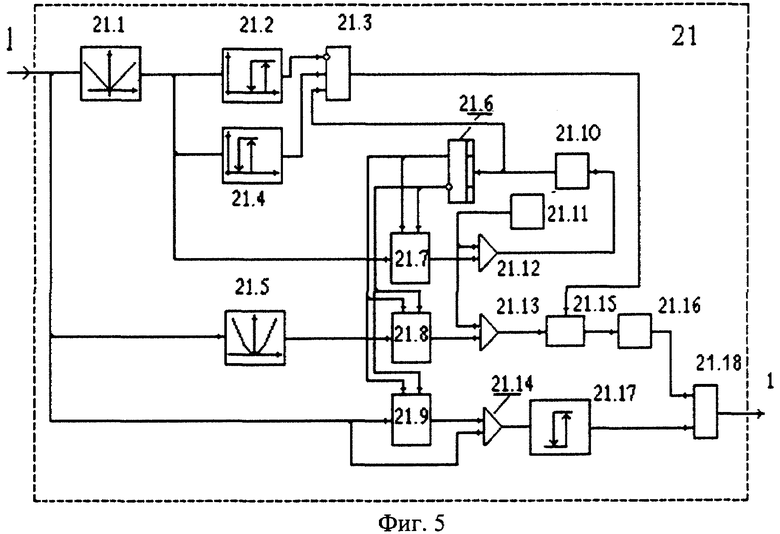
На фиг.5 - пример реализации блока формирования импульсных воздействий в АПБ процессора ИПУ МКС.
На фиг.1 приведена структура информационно-измерительной системы для мониторинга состояний контейнеров, в которой на каждом уровне обработки результатов мониторинга состояний контейнеров (МСК) содержится Sl,q, интерактивных программируемых устройств МСК, где Sl,q, l=0, 1,...,L (ПЭВМ, например, IBM PC, а также любое другое устройство, имеющее стандартный интерфейс RS-232C, ИРПС, USB и т.п.); q=1, 2,...,Ql, L - число уровней МСК, Ql - число многоканальных интерактивных программируемых устройств МСК (далее для краткости - ИПУ МСК) на l-уровне, каждое из Sl,q ИПУ МСК l-уровня соединено, по крайней мере, с одним ИПУ МСК (l-1)-го уровня, с двумя ИПУ МСК l-уровня и двумя ИПУ МСК (l+1)-го уровня, при этом каждое из Sl,q ИПУ МСК содержит: блок системной памяти, аппаратно программные блоки (АПБ), соответственно, АПБ первого аудиоинтерфейса, АПБ приемопередатчика, АПБ второго аудиоинтерфейса, АПБ глобального позиционирования с приемной и передающей антенной и блоком вычисления координат, АПБ процессора мониторинга состояния контейнеров, АПБ видео адаптера, АПБ интерфейса жестких дисков, АПБ интерфейса гибких дисков, АПБ интерфейса оптических дисков, АПБ интерфейса последовательного порта, АПБ сетевого интерфейса, которые объединены системной шиной ИПУ МКС.
На фиг.2 приведен пример реализации ИПУ МСК, которое содержит: блок 1 системной памяти, аппаратно программные блоки (АПБ) 2-12, соответственно, АПБ 2 первого аудиоинтерфейса (в простейшем случае микрофон с усилителем), АПБ 3 приемопередатчика (например, блок сотовой/мобильной связи GSM - Global System for Mobile communication, состоящий из автономных локализаторов GSM), АПБ 4 второго аудиоинтерфейса (в простейшем случае телефон с усилителем), АПБ 5 глобального позиционирования (Global Positioning System - GPS) с приемной и передающей антенной и блоком вычисления координат (не показаны), АПБ 6 процессора мониторинга состояния контейнеров, АПБ 7 видеоадаптера, АПБ 8 интерфейса жестких дисков, АПБ 9 интерфейса гибких дисков, АПБ 10 интерфейса оптических дисков, АПБ 11 интерфейса последовательного порта, АПБ 12 сетевого интерфейса, которые объединены системной шиной 13 ИПУ МКС.
На фиг.3 приведен пример реализации АПБ процессора мониторинга состояния контейнеров, который содержит последовательно соединенные блок 1 нормирующих устройств (НУ), коммутатор - 2, блок АЦП - 3, первое запоминающее устройство (ЗУ) - 4, блок 5 интерполирования, блок 14 преобразования, второе ЗУ 15, регистрирующее устройство (РУ) 16, на выходе которого установлены маска 17, оптическая система 18 и фотодатчик 19, выходом подключенный к входу блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера, первый выход которого соединен со вторым управляющим входом РУ 16, а второй выход с входом блока формирования импульсных воздействий 21, выход которого соединен с последовательно соединенными блоком синхронизации 11, блоком задания постоянных коэффициентов 10, блоком масштабирования 7 и первой схемой формирования дискретных приращений 8, первый и второй выходы которой соединены соответственно с первым и вторым входами второго ЗУ 15, первая информационная шина которого объединена с первым управляющим входом РУ 16 и с информационной шиной блока синхронизации 11, вторая информационная шина второго ЗУ 15 соединена с информационным выходом схемы формирования адреса записи 12 и информационным входом второй схемы формирования дискретных приращений 9, выход которой соединен с пятым входом блока 14 преобразования, информационный вход схемы формирования адреса записи 12 соединен с информационным выходом блока задания постоянных коэффициентов 10, вход которой соединен с управляющими входами первого ЗУ 4, первый вход первой схемой формирования дискретных приращений 8 объединен с информационными входами блока 5 интерполирования и блока выделения экстремума 6, первый выход которого соединен с первым входом блока 14 преобразования и вторым входом первой схемой формирования дискретных приращений 8, второй выход блока выделения экстремума 6 соединен с входом блока масштабирования 7, вторые вход и выход блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера объединены соответственно с управляющим входом и выходом АПБ процессора мониторинга состояния контейнеров.
На фиг.4 - пример реализации блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера АПБ процессора мониторинга состояния контейнеров, который содержит генератор 20.7 горизонтальной развертки, генератор 20.8 вертикальной развертки и генератор 20.6 синусоидальных колебаний, первую, вторую и третью входным шинам Xi, Yj и Zk, первый, второй и третий компараторы 20.12, 20.11 и 20.13, элемент 20.14 совпадения, выход которого соединен с первыми управляющими входами генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний, обеспечивая сохранение на их выходах сигналов, соответствующих входным сигналам, поступающим соответственно по первой, второй и третьей входным шинам Xi, Yj и Zk, которые объединены с вторым входом блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера. Кроме того, сигнал с выхода элемента 20.14 совпадения управляет электронным ключом 20.10, с выхода которого на выходную шину 2 блока 20 подается сигнал, характеризующий значение гипотезы о близости формируемого образа оценки состояния контейнера, и запускает элемент 20.9 задержки. Выход элемента 20.14 совпадения соединен со вторыми управляющими входами генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний, выходы которых соединены с входом блока 20.1 кодированного согласования, который содержит последовательно соединенные дешифратор 20.2, блок пассивных элементов согласования 20.3 и шифратор 20.4. Первый вход и второй выход блока 20 формирования статистических характеристик анализируемого процесса сопровождения контейнера объединен с входом и выходом электронного ключа 20.10, а первый выход блока 20 - информационная шина 1, объединена с выходом блока 20.1 кодированного согласования.
На фиг.5 - пример реализации блока 21 формирования импульсных воздействий в АПБ процессора мониторинга состояния контейнеров, который содержит блок нормирования или определения модуля 21.1, релейные элементы 21.2, 21.4 и 21.17, блок возведения в квадрат 21.5, элементы И 21.3 и 21.18, триггер 21.6, блоки выборки-хранения 21.7, 21.8 и 21.9, сумматоры 21.12, 21.13 и 21.14, источник эталонных напряжений 21.11, формирователи импульсов 21.10 и 21.16, электронный ключ 21.15, управляющий вход которого соединен с выходом первого элемента И 21.3, входы которого соединены соответственно с выходом первого релейного элемента 21.2, выходом второго релейного элемента 21.4 и выходом первого формирователя импульсов 21.10, вход которого соединен с выходом первого сумматора 21.12, первый вход которого соединен с выходом первого блока выборки-хранения 21.7, а второй вход объединен с выходом источника эталонных напряжений 21.11 и вторым входом второго сумматора 21.13, первый вход которого соединен с выходом второго блока выборки-хранения 21.8, вход которого соединен с выходом блока возведения в квадрат 21.5, вход которого объединен с входом блока нормирования 21.1, с входом третьего блока выборки-хранения 21.9 и первым входом третьего сумматора 21.4, второй вход которого соединен с выходом третьего блока выборки-хранения 21.9, а выход через третий релейный элемент 21.17 с первым входом второго элемента И 21.18, второй вход которого соединен через последовательно соединенные второй формирователь импульсов 21.16 и электронный ключ 21.15 с выходом второго сумматора 21.13, при этом управляющие входы блоков выборки-хранения объединены с выходами триггера 21.6, вход которого соединен с выходом первого формирователя импульсов, а входы первого и второго релейного элементов объединены с входом первого сумматора и соединены через блок нормирования 21.1 к входу блока 21 формирования импульсных воздействий, выход которого объединен с выходом второго элемента И 21.18.
Способ распределенного сопровождения/мониторинга контейнеров согласно предлагаемой информационно-измерительной системе для его осуществления реализуется следующим образом.
Значения сигналов, возникающие на системной шине 13 ИЛУ МКС (см. фиг.2) в процессе формирования интерактивных поисковых запросов на основе работы АПБ 3, 5, 11 и 12, поступают на входы нормирующего устройства 1 АПБ процессора ИЛУ МКС (см. фиг.3) при этом эти сигналы условно разбивают на две группы. Для определенности будем полагать, что первая группа сигналов характеризует независимые по времени интерактивные процессы формирования поисковых запросов о состоянии контейнеров, например, первая группа сигналов представляет набор наблюдаемых интерактивных процессов формирования допустимых интервалов изменения параметров состояния контейнера в функции от его места нахождения по пути транспортировки, в общем случае они зависят от лица, принимающего решение (ЛПР) на l-уровне мониторинга состояния контейнеров, которое имеет доступ к устройству или каналу сотовой связи, а именно;

Вторую группу сигналов представляют текущие параметры состояния контейнера, т.е. вторая группа каналов измерений характеризует группу зависимых сигналов, т.е. это сведения о фактических значениях контролируемых параметров контейнера:

Следовательно, в рассматриваемом примере для упрощения изложения, в первой группе будем рассматривать три независимых канала измерений состояния интерактивных процессов формирования образов состояния контейнера, а во второй - 2n (в рассматриваемом случае восемь, т.к. n=3) зависимых каналов измерений состояния контейнера. При этом согласно предлагаемому способу необходимо хранить соответствующие оценки верхних и нижних значений результатов измерений по каждому каналу формирования образов состояния контейнера, т.е. ∀t>0:
X(1)=inf X1(t) или X(1) → min X1(t),
X(2)=sup X1(t) или X(2) → max X1(t),
аналогично
Y(1)=inf Y1(t) или Y(1) → min Y1(t),
Y(2)=sup Y1(t) или Y(2) → max Y1(t),
Z(1)=inf Z1(t) или Z(1) → min Z1(t),
Z(2)=sup Z1(t) или Z(2) → max Z1(t).
На первом временном интервале (Т1) осуществляется опрос следующих каналов НУ 1 (см. фиг.3): первого канала НУ 1 из первой группы независимых сигналов, на который поступает в рассматриваемом примере - Х(1); третьего канала - Y(1) и пятого - Z(1). Одновременно во второй группе каналов опрашивается первый канал, на который подается для измерения сигнал U(1). Измеренные в момент t1 значения после преобразования в блоке 3 запоминают в первом ЗУ 4. На такте t2 осуществляют опрос второго, третьего, пятого и восьмого каналов. На такте t3 осуществляется опрос первого, третьего, шестого и девятого каналов. На такте t4 осуществляют, опрос второго, третьего, шестого и десятого каналов. Для рассматриваемого примера этот процесс комбинаторного опроса каналов системной шины ИПУ МКС из разных групп и запоминание значений сигналов завершается за восемь тактов. Описанная последовательность операций интерактивного формирования образов состояния контейнера реализована на основе фиксации верхних {Х(2), Y(2), Z(2)} и нижних {X(1), Y(1), Z(1)} границ изменения амплитуд сигналов первой группы каналов измерения состояния системной шины ИПУ МКС.
При этом проекция, например, электронного луча на экране электроннолучевой трубки РУ 16 (см. фиг.3) передается на рабочую поверхность фотодатчика 19 через оптическую систему 18 и маску 17, выполненную так, что в трехмерном пространстве выделены области, соответствующие гипотезам о различных состояниях анализируемого процесса формирования состояния контейнера. Оптический коэффициент пропускания маски 17 имеет одно и то же значение для точек одной гипотезы и различное для различных гипотез близости образов, например, нормального состояния контейнера, в простейшем случае нормальное состояние контейнера определяется совпадением предписанных его текущих значений с заданными ЛПР значениями символов. Маска 17, изготовленная так, что в пространстве координат (X, Y, Z) выделены области, соответствующие гипотезам близости образов нормального состояния параметров контейнера, оценивается на основе использования следующего соотношения:

где f(.) - любая интегрируемая по Риману функция или параметрическая зависимость, Xi, Yj и Zk - текущие значения переменных (или параметрических зависимостей) - входных переменных - (параметров) независимых (или зависимых) координат, о различных состояниях анализируемого (контролируемого) процесса формирования образов состояния контейнера, которые устанавливает ЛПР на основе использования средств сотовой связи АПБ 3 и АПБ 5 глобального позиционирования или навигации ИЛУ МКС (см. фиг.2).
Оптический коэффициент пропускания маски 17 (см. фиг.3) имеет одно и то же значение для точек, принадлежащих одной и той же гипотезе Hijk(.) близости, например, пароля доступа к изменению параметров состояния контейнера, например открытию или его закрытию, и различное - для различных гипотез.
При этом в режиме оптимизации контроля движения контейнеров измеряют разность общего времени простоя контейнера при «участковой» (tс) системе передвижения контейнеров (когда контейнер имеет сортировку на каждом попутном сортировочном пункте) и времени простоя контейнеров (tmp) при проследовании контейнеров транзитом за вычетом времени накопления (tнак) контейнеров, вызванного задержкой контейнеров под накоплением, например, на всех попутных станциях, имеющих сортировочные контейнерные площадки, контролируют общую экономию времени при сопровождении N контейнеров по следующей зависимости:

где n/ и n// - число контейнеров, проходящих контейнерные площадки без переработки и с переработкой,
tci - время простоя i-го контейнера при «участковой» системе передвижения контейнеров,
 и
и  - время простоя i-го контейнера при «участковой» системе передвижения контейнеров без его переработки и с переработкой,
- время простоя i-го контейнера при «участковой» системе передвижения контейнеров без его переработки и с переработкой,
tнакi - время накопления i-го контейнера при «участковой» системе передвижения контейнеров.
Задание и контроль вышеперечисленных функций может быть реализовано на основе изменения интенсивности "почернения", густотой штриховки или частотой точек соответствующих участков маски, при учете апертуры электронного луча и разрешающей способности фотоприемника. Это позволяет при входных величинах Xi, Yj и Zk (см. фиг.4) получать на выходе 2 блока 20 формирования статистических характеристик анализируемого процесса формирования образов состояния контейнера с амплитудой, равной гипотезе Нijk(.) и с частотой, определяемой параметрами соответствующих генераторов развертки.
При попадании электронного луча на экран электронно-лучевой трубки, в определенное положение (соответствующее координатам или данным) на входах блока 20 - Xi, Yj и Zk, (см. фиг.4), сигналы генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний превышают входные сигналы, поступающие соответственно по первой, второй и третьей входным шинам Хi, Yj и Zk, что приводит к появлению сигналов на выходах первого, второго и третьего компараторов 20.12, 20.11 и 20.13, вызывающих срабатывание элемента 20.14 совпадения. Сигнал с выхода элемента 20.14 совпадения поступает на первые управляющие входы генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний, обеспечивая сохранение на их выходах сигналов, соответствующих входным сигналам, поступающим соответственно по первой, второй и третьей входным шинам Xi, Yj и Zk. Кроме того, сигнал с выхода элемента 20.14 совпадения открывает ключ 20.10, с выхода которого на выходную шину 2 блока 20 подается сигнал, характеризующий значение гипотезы Нijk(.). Через интервал времени, определяемый элементом 20.9 задержки, сигнал элемента 20.14 совпадения поступает на вторые управляющие входы генератора 20.7 горизонтальной развертки, генератора 20.8 вертикальной развертки и генератора 20.6 синусоидальных колебаний, что приводит к исчезновению сигналов на их выходах. При этом исчезают сигналы на выходах первого, второго и третьего компараторов 20.12, 20.11 и 20.13 и элемента 20.14 совпадения, а цикл сканирования, например, экрана электронно-лучевой трубки или ПЗС матрицы РУ 16 повторяется.
Процесс формирования периода и длительности следования управляющих воздействий на выходе 1 блока 21 (см. фиг.5) рассмотрим для случая, когда на его входе 1 абсолютное значение гипотезы о соответствии сформированного образа состояния контейнера |Нijk(.)|<Δн/2, где Δн/2 - зона срабатывания первого релейного элемента 21.2 и соответствующее ей нормированное значение |e(t)|<1. Предполагаем, что нормирование текущих значений гипотезы Hijk(.) (или ошибки - e(t)) осуществляется с коэффициентом Δ=Δн/2. Пусть в исходном положении триггер 21.6 находится в единичном состоянии, тогда с блока 21.7 выборки-хранения поступает напряжение
на один из входов сумматора 21.12, на второй вход которого поступает постоянное напряжение (Е) от источника 21.11 эталонных напряжений. В результате на вход первого формирователя 21.10 импульсов подается постоянное напряжение - Uфi=Ui+Е.
Постоянная составляющая Е может быть выбрана, например, из интервала значений с нижней границей, определяемой длительностью выполнения самой продолжительной последовательности операций преобразований (обработки) в блоках 1÷15 (фиг.5) и верхней границей, определяемой, например, как 1/(Kf·Fmax), где Fmax - максимальная частота изменения значений гипотез Нijk(.), Kf - постоянный коэффициент, который согласно теореме отсчетов во временном представлении непрерывных сигналов в дискретной форме можно установить ≥2. В этой связи верхняя граница значений данного интервала может быть априорно выбрана из необходимого условия адекватности представления непрерывного сигнала своими дискретными значениями непосредственно в процессе формирования образа вектора оценки состояния контейнера. Это позволяет обеспечить измерение и обработку значений соответствующих сигналов гипотез Hijk(.) с наименьшей потерей информации на любом этапе сопровождения соответствующих состояний контейнера и его параметров. Далее в соответствии с Uфi на выходе формирователя 21.10 импульсов будет сформирован импульс длительностью Тi=Кфi·Uфi, где Кфi - коэффициент передачи формирователя 21.10 импульсов.
Во время действия данного периода Тi в блоке 21.7 формируется
В конце периода Ti формирователь 21.10 импульсов устанавливает триггер 21.6 в следующее (например, нулевое) состояние. Описанные выше последовательности операций непрерывно повторяются в функциональной зависимости от изменения e(t), на основе которой определяется эффективность процесса формирования и оценки образов состояния контейнера на соответствующем этапе его транспортировки и доступа к его содержимому.
В моменты окончания каждого периода Ti и начала следующего Ti+1, составляющие незначительный по продолжительности промежуток времени, формируется сигнал, достаточный для отключения электронного ключа 21.15. Этим обеспечивается требуемая степень синхронизации между началом момента формирования периода управляющих воздействий при формировании образов состояний контейнера, например, при смене пароля санкционированного доступа к содержимому контейнера, или коррекции, уточнении - образов параметров состояния контейнера на пути его следования, в формирователе 21.10 и длительности импульса в формирователе 21.16 для всех Тi, i=1, 2,...,n. Формирование напряжений на входе второго формирователя 21.16 импульсов реализовано по схеме, аналогичной вышеописанной на входе формирователя 21.10 импульсов, с тем лишь отличием, что формирование длительности выходных импульсов осуществляется в соответствии со значением оценки интегрального изменения квадрата нормированного сигнала гипотез Hijk(.) и во все периоды Тi, для которых Δтр≤|e(t)≤Δн/2, где Δтр - зона нечувствительности релейного элемента 21.4, устанавливаемая на основе критерия точности воспроизведения (распознавания, прогнозирования и т.п.) текущих значений сигнала гипотез Нijk(.) по результатам процесса формирования параметров состояния контейнера. Формирование каждого периода Тi осуществляется на основе последовательности операций (Кфi·Е), априорных по отношению к динамике изменения значений соответствующих сигналов гипотез Hijk(.), и корректируется текущими значениями интегральных оценок нормированной ее оценки, полученными на предшествующем периоде дискретизации времени или процесса формирования образов состояний контейнера.
Таким образом, предлагаемая совокупность признаков позволяет осуществлять интерактивные процессы мониторинга состояния контейнеров на основе использования распределенных вычислительных систем и сетей, а также повысить точность, достоверность и объективность результатов мониторинга состояния контейнеров в процессе их транспортировки, на основе более широкого использования однородных многоуровневых вычислительных систем, за счет расширения функциональных возможностей существующих технических средств и повышения эффективности соответствующих интерактивных (диалоговых) систем мониторинга состояния перемещаемых объектов и ценных грузов.
Изобретение относится к области приборостроения и может найти применение для повышения уровня безопасности транспортировки ценных и взрывоопасных грузов и посылок. Технический результат - расширение функциональных возможностей. Для реализации данного результата совмещают процессы формирования интерактивных запросов о состоянии контейнеров и процессы цифровых преобразований результатов измерений соответствующих сигналов по каждому из каналов формирования запросов о состоянии контейнеров. При этом предварительно входные сигналы запросов разделяют (разбивают, выделяют, группируют и т.п.) как минимум на две группы. В первую группу относят независимые от времени интерактивные запросы о состоянии контейнеров, а во вторую - зависимые от состояния контейнеров. При этом устанавливают каналы измерения, соответственно независимых и зависимых сигналов поисковых запросов о состоянии контейнеров. 2 н. и 3 з.п. ф-лы, 5 ил.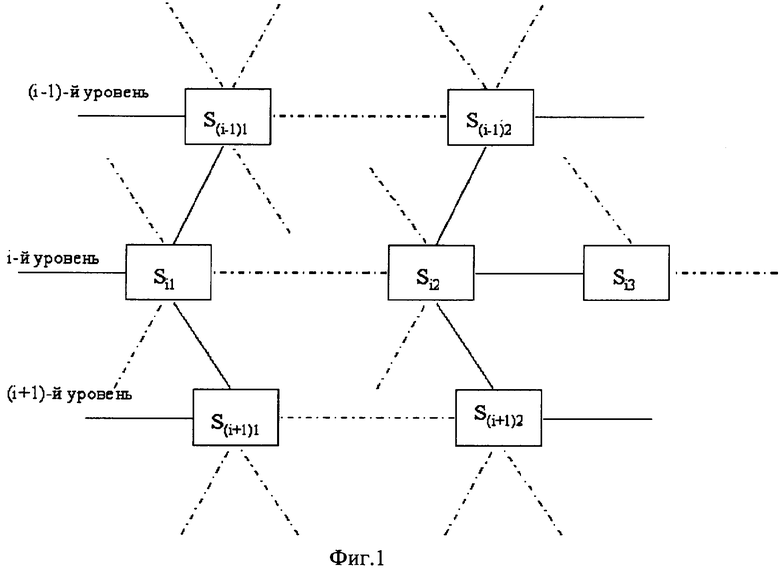
 и верхних
и верхних 
пределов изменения с учетом допустимой, например, абсолютной погрешности измерения параметров состояния контейнера на соответствующем временном интервале  измерения для всех
измерения для всех  , i1=1, 2,..., при этом длительность временного интервала
, i1=1, 2,..., при этом длительность временного интервала  формирования интерактивных поисковых запросов о состоянии контейнеров корректируют на основе значений сигнала рассогласования о близости контролируемого параметра состояния контейнера к установленному или заранее предписанному содержанию, информационному запросу или информационной потребности на предшествующем интервале
формирования интерактивных поисковых запросов о состоянии контейнеров корректируют на основе значений сигнала рассогласования о близости контролируемого параметра состояния контейнера к установленному или заранее предписанному содержанию, информационному запросу или информационной потребности на предшествующем интервале  контроля состояния параметров контейнера, при этом измеряют разность общего времени простоя контейнера при "участковой" (tc) системе передвижения контейнеров (когда контейнер имеет сортировку на каждом попутном сортировочном пункте) и времени простоя контейнеров (tmp) при проследовании контейнеров транзитом за вычетом времени накопления (tнак) контейнеров, вызванного задержкой контейнеров под накоплением, например, на всех попутных станциях, имеющих сортировочные контейнерные площадки, контролируют общую экономию времени при сопровождении N контейнеров по следующей зависимости:
контроля состояния параметров контейнера, при этом измеряют разность общего времени простоя контейнера при "участковой" (tc) системе передвижения контейнеров (когда контейнер имеет сортировку на каждом попутном сортировочном пункте) и времени простоя контейнеров (tmp) при проследовании контейнеров транзитом за вычетом времени накопления (tнак) контейнеров, вызванного задержкой контейнеров под накоплением, например, на всех попутных станциях, имеющих сортировочные контейнерные площадки, контролируют общую экономию времени при сопровождении N контейнеров по следующей зависимости:

где n' и n'' - число контейнеров, проходящих контейнерные площадки без переработки и с переработкой,
tci - время простоя i-го контейнера при "участковой" системе передвижения контейнеров,
 и
и  - время простоя i-го контейнера при "участковой" системе передвижения контейнеров без его переработки и с переработкой,
- время простоя i-го контейнера при "участковой" системе передвижения контейнеров без его переработки и с переработкой,
tнакi - время накопления i-го контейнера при "участковой" системе передвижения контейнеров.
| Гиль Г.К., Горохов В.В., Мацнев В.Н | |||
| и др | |||
| Почтовая связь: Справочник | |||
| - М.: Связь, 1978, с.352-353 | |||
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ ДАННЫХ ПРИ ПЕРЕДАЧЕ SMS-СООБЩЕНИЙ | 2003 |
|
RU2246184C1 |
| US 2004127238 A, 01.07.2004 | |||
| Автоматический дробитель для вращательного бурения с примывкой | 1931 |
|
SU29431A1 |
| WO 2004032538 A, 15.04.2004 | |||
| Термический насос | 1927 |
|
SU51321A1 |
| СПОСОБ И УСТРОЙСТВО УМЕНЬШЕНИЯ ВОЗДЕЙСТВИЯ ПЕРЕВЫБОРА ЯЧЕЙКИ НА СКОРОСТЬ ПЕРЕДАЧИ ДАННЫХ ПО ТЕХНОЛОГИИ GPRS/EDGE | 2002 |
|
RU2251806C2 |
| JP 2000335306 A, 05.12.2000 | |||
| DE 10353862 A1, 24.06.2004 | |||
| FR 2847228 A1, 21.05.2004. | |||

