Изобретение относится к ультразвуковой микроскопии и может быть использовано для исследования и визуализаций пространственного распределения структурно-механических свойств микрообраз- цов материалов, а также для исследования
отражающих свойств локальных участков в ультразвуковом диапазоне.
Цель изобретения - повышение достоверности результатов исследования и упрощение аппаратурной реализации способа за счет использования в качестве зондирутощего гармонического сигнала и осуще- твления допплероаского сдвига спектра отраженного сигнала, позволяющего производить его обработку селектированием в частотной области.
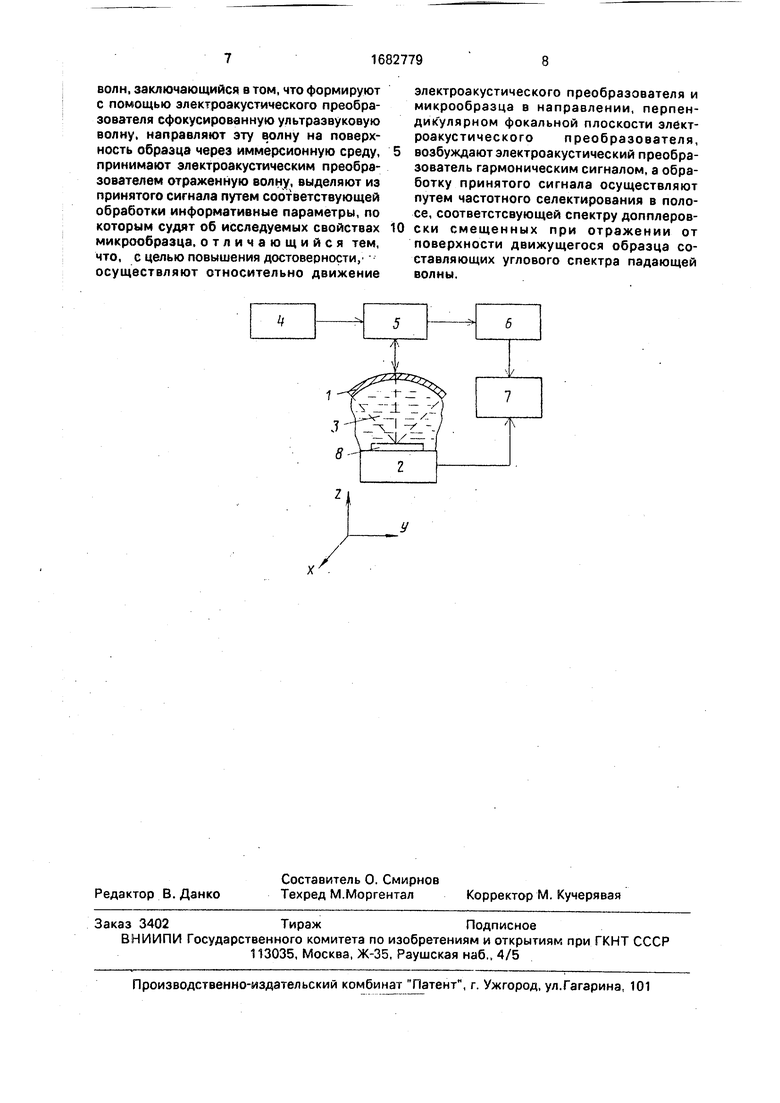
На чертеже представлен пример схемы устройства, реализующего способ.
Устройство выполнено на основе сканирующего акустического микроскопа и содержит электроакустический преобразователь 1, трехкоординатный механизм 2 сканирования, установленный походу излучения преобразователя 1, иммерсионную среду 3, которая заполняет объем между преобразователем 1 и механизмом 2 сканирования с обеспечением акустического контакта между ними, последовательно соединенные генератор 4 гармонического сигнала, развязывающий элемент 5, вторым входом (выходом) соединенный с электрическим выходом (входом) преобразователя 1 и предназначенный для разделения трактов зондирующего и отраженного сигналов, приемник б и блок 7 обработки и регистрации сигнала (блок 7 обработки), вторым входом соединенный с синхровыходом механизма 2 сканирования.
Перед началом работы устройства исс ледуемый образец, обозначенный позицией 8, закрепляется на механизме 2 сканирования.
Способ осуществляется следующим образом.
Гармонический сигнал, вырабатываемый генератором 4, подводится к электроакустическому преобразователю 1 через развязывающий элемент 5, в качестве которого может использоваться, например, СВЧ-циркулятор или направленный ответ- витель. Преобразователь 1, возбуждаемый сигналом генератора 4, излучает в иммерсионную среду 3 сфокусированную ультразвуковую волну, которая отражается от поверхности образца 8, перемещаемого в направлении, перпендикулярном фокальной плоскости преобразователя 1 (вдоль оси Z на чертеже), механизмом 2 сканирования распространяется в обратном направлении и принимается тем же преобразователем 1. Принятый электрический сигнал поступает на вход приемника б через развязывающий элемент 5. На этот вход приемника 6 поступают также сигнал прямого прохождения через развязывающий элемент 5 и сигналы, соответствующие отражению от электрических и акустических неоднородностей, расположенных на пути распространения сигнала и ультразвуковой волны от развязывающего элемента 5 до образца 8. Сумма этих сигналов и сигнал
отражения от образца 8 подвергаются в приемнике 6 квадратичному детектированию и затем полосовой фильтрации. Таким образом, выделяется допплеровски смещенный сигнал, отраженный от образца 8, Выделенный сигнал затем попадает в блок 7 обработки и регистрации сигнала, который может содержать, например, канал, в котором производится определение
0 коэффициента отражения в зависимости от угла падения, и канал формирования изображения. В первом канале сигнал, регистрируемый как функция смещения образца 8 из фокальной плоскости в отсутствие его
5 сканирования по координатам Xs, YS, подвергается спектральному анализу либо путем аналого-цифрового преобразования с пс 1едующей цифровой обработкой, либо, в случае равномерного движения вдоль оси Z,
0 аналоговыми средствами.
В канале формирования изображения производится определение необходимого параметра сигнала, подлежащего визуализации, например, находится огибающая
5 сигнала как функция смещения образца 8 из фокальной плоскости, затем производится отсчет этого параметра для конкретного значения смещения образца 8, что дает один элемент изображения. Полное изобра0 жение формируется путем сканирования образца механизмом 2 сканирования и многократного повторения описанной процедуры для каждого элемента изображения, Таким образом, способ заключается в
5 том, что формируют с помощью электроакустического преобразователя, возбуждаемого гармоническим электрическим сигналом, сфокусированную ультразвуковую волну, распространяющуюся в иммерсионной сре0 де; направляют эту волну на поверхность образца; осуществляют относительное движение электроакустического преобразователя и образца в направлении, перпендикулярном фокальной плоскости
5 преобразователя; принимают электроакустическим преобразователем отраженную волну; выделяют из принятого сигнала, обрабатывая его путем частотного селектиро- вания в полосе, соответствующей спектру
0 допплеровски смещенных при отражении от поверхности движущегося образца составляющих углового спектра падающей волны, информативные параметры, по которым судят об исследуемых свойствах образ5 ца.
В процессе реализации способа на вход приемника 6 поступают два сигнала. Один из них - сигнал прямого прохождения и переотражения зондирующего сигнала - может быть представлен в виде
Si(t) Aicos(ufet),(1)
где (Do - частота возбуждающего гармонического сигнала.
Второй сигнал, отраженный от образца 8, положение которого относительно акустической оси электроакустического преобразователя 1 определяется координатами (Xs, Ys), является функцией смещения образца 8 из фокальной плоскости Z(t): S2(t) V(Z(t), Xs, Ys)cos( ufe t + / (Z(t), Xs, Ys)},
(2)
где фунции V и р обозначают амплитуду и фазу отраженного от образца 8 сигнала.
Затем сумму этих двух сигналов подвергают, например, квадратичному детектированию и путем последующей фильтрации выделяют низкочастотный полезный сигнал, который на основании (1) и (2) может быть представлен в виде S3(t) AiV(Z(t), Xs, Ys)cos( p (Z(t), Xs, Ys)). (3)
При фиксированных Xs, Ys этот сигнал пропорционален действительной части аналитического сигнала Va(Z(t)), который связан с зависимостью коэффициента отражения ультразвуковой волны от угла падения ©на поверхность локальной области образца 8 Р(Э, Xs, Ys) R(Q) обратным Фурье-преобразованием
Va(Z(t)) 7Г/2„
/ R (0) Р2д (0) exp (i 2k Z (t) cos G) sin в d в,
о
(4)
где k 2 тг/А (А - длина волны ультразвука в иммерсионной среде 3);t
Рд (0) - обобщенная апертурная функция электроакустического преобразователя 1.
Из формулы (4) следует, что спектр аналитического сигнала Va(Z(t)), а следовательно, и сигнала S3 Re{Va(Z(t))} представляет собой спектр допплеровски смещенных при движении образца 8 составляющих углового спектра падающей волны. Поэтому в режиме нахождения коэффициента отражения в зависимости от угла падения на поверхность образца 8 сигнал S3(Z(t)) подвергают спектральному анализу. При этом анализ можно производить численными методами, если сигнал представлен как функция смещения Z, либо, при условии равномерности движения Z(t) V0t, где Vo const - скорость движения образца 8, спектральную плотность можно находить радиотехническими способами.
В режиме формирования изображения производят обработку сигнала 5з(х) для выделения необходимой информации, например амплитуды сигнала или фазы. Затем регистрируют значения преобразованного
сигнала в моменты времени, когда смещение образца 8 из фокальной плоскости принимает определенное фиксированное значение, и, производя механическое ска- нировакие образца 8 в плоскости (Xs, Ys), формируют акустическое изображение.
Таким образом, технические преимущества способа заключаются в следующем. В качестве зондирующего сигнала ис0 пользуется гармонический, а не импульсный сигнал, образцу сообщается движение в направлении, перпендикулярном фокальной плоскости электроакустического преобразователя, что позволяет выделять
5 полезный сигнал на фоне сигналов помех за счет допплеровского смещения спектра отраженной волны, а не за счет временной задержки отраженного сигнала относительно зондирующего. Отсутствуют ограниче0 ния на величину фокусного расстояния электроакустического преобразователя, что позволяет, например, повысить уровень полезного сигнала на высоких рабочих частотах. Приемный радиотракт устройства,
5 реализующего способ, может быть узкополосным, поскольку его полоса пропускания определяется только шириной допплеровского спектра отраженного сигнала, что повышает его помехозащищенность.
0 Гармонический зондирующий сигнал, проникая непосредственно на вход приемного устройства, используется как опорный и, отфильтровываясь при дальнейшей обработке, не является помехой. Использование
5 гармонического сигнала устраняет также некорректность, связанную с зависимостью упругих параметров исследуемой поверхности от длины волны ультразвука в иммерсионной среде, так как результаты измерения
0 соответствуют единственному ее значению. Кроме того, может быть снижено влияние нелинейных эффектов за счет снижения пиковой мощности зондирующего сигнала при сохранении его средней мощности.
5 Реализация способа может быть осуществлена существенно более простыми (по отношению к известному способу) аппаратурными средствами, так как отсутствует необходимость сложной обработки
0 отраженного сигнала на высокой частоте, а выделенный полезный низкочастотный сигнал, являясь результатом интерференции отраженного и зондирующего сигналов, содержит информацию как об амплитуде, так
5 и фазе отраженного сигнала, которые являются в данном случае информативными параметрами.
Формула изобретения Способ исследования микрообразцов с помощью сфокусированных ультразвуковых
волн, заключающийся в том, что формируют с помощью электроакустического преобразователя сфокусированную ультразвуковую волну, направляют эту волну на поверхность образца через иммерсионную среду, принимают электроакустическим преобразователем отраженную волну, выделяют из принятого сигнала путем соответствующей обработки информативные параметры, по которым судят об исследуемых свойствах микрообразца, отличающийся тем, что, с целью повышения достоверности, осуществляют относительно движение
0
электроакустического преобразователя и микрообразца в направлении, перпендикулярном фокальной плоскости электроакустического преобразователя, возбуждают электроакустический преобразователь гармоническим сигналом, а обработку принятого сигнала осуществляют путем частотного селектирования в полосе, соответстсвующей спектру допплеров- ски смещенных при отражении от поверхности движущегося образца составляющих углового спектра падающей волны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования акустических изображений | 1988 |
|
SU1518784A1 |
| Способ определения акустических характеристик образца | 1988 |
|
SU1610427A1 |
| Способ ультразвукового томографического контроля изделий | 1990 |
|
SU1817019A1 |
| УЛЬТРАЗВУКОВОЙ МИКРОСКОП | 2011 |
|
RU2451291C1 |
| Способ исследования внутренней структуры объектов в трансэмиссионном акустическом микроскопе | 1986 |
|
SU1409915A1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ИНТРОСКОПИИ | 2008 |
|
RU2359265C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351925C1 |
| УЛЬТРАЗВУКОВОЙ МИКРОСКОП | 2005 |
|
RU2270997C1 |
| Способ измерения коэффициента отражения ультразвуковой волны в зависимости от угла падения на поверхность образца | 1988 |
|
SU1523987A1 |
| Способ измерения обобщенной апертурной функции ультразвукового элемента сканирующего акустического микроскопа | 1988 |
|
SU1576839A1 |
Изобретение относится к ультразвуковой микроскопии. Целью изобретения является повышение достоверности результатов исследования и упрощение аппаратурной реализации способа за счет использования в качестве зондирующего гармонического сигнала и осуществления допплеровского сдвига спектра отраженного сигнала, позволяющего производить его обработку селектированием в частотной области. Сформированная электроакустическим преобразователем 1, возбуждаемым гармоническим сигналом от генератора 4, сфоку- сированная ультразвуковая волна, отразившись от поверхности движущегося в направлении, перпендикулярном фокальной плоскости преобразователя 1, образца 8, принимается последним, и информационный сигнал поступает в тракт обработки для выделения из него информативных параметров, по которым судят о свойствах образца 8. Использование гармонического зондирующего сигнала и обработка информационного сигнала путем частотного се- лектирования в полосе, соответствующей спектру допплеровски смещенного отраженного сигнала,позволяет снять ограничения на величину фокусного расстояния, что позволяет повысить уровень полезного сигнала на высоких рабочих частотах, выполнить узкополосным, приемный тракт устройства, реализующего способ, легко отфильтровать сигнал прямого прохождения (гармонический), устранить некорректность, связанную с зависимостью упругих параметров образца от длины волны (фиксированной), снизить влияние нелинейных эффектов путем снижения пиковой мощности зондирующего сигнала при сохранении средней мощности, исключить необходимость сложной обработки отраженного сигнала на высокой частоте, т.к. информационный сигнал является низкочастотным и содержит оба информативных параметра - амплитуду и фазу. ем самым обеспечивается достижение указанных целей изобретения. 1 ил. сл о 00 ю VI VI чэ
| Куэйт К.Ф., Алталар А.,Викрамасингхе Х.К | |||
| Акустическая микроскопия с механическим сканированием | |||
| Обзор, ТИИЭР, 1979, т | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
