Изобретение относится к управлению.и контролю электрических машин и может быть использовано при изготовлении и эксплуатации однофазных шаговых двигателей, например часовых.
Цель изобретения - повышение достоверности и надежности контроля работоспособности двигателя.
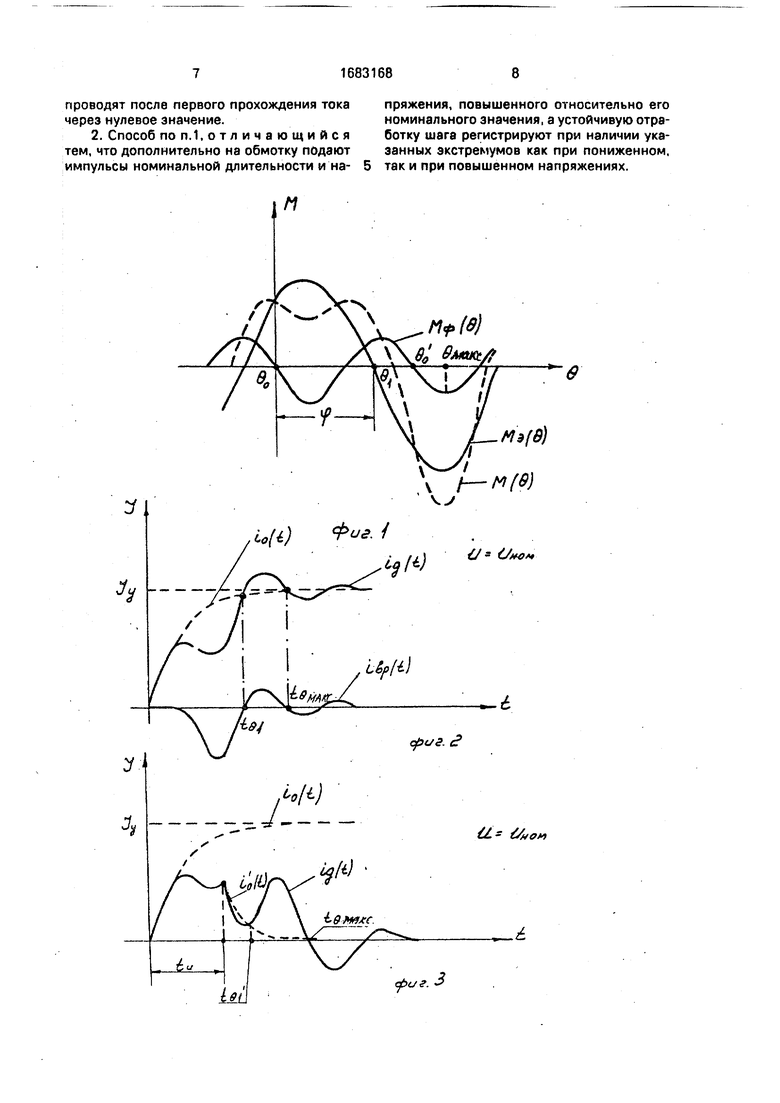
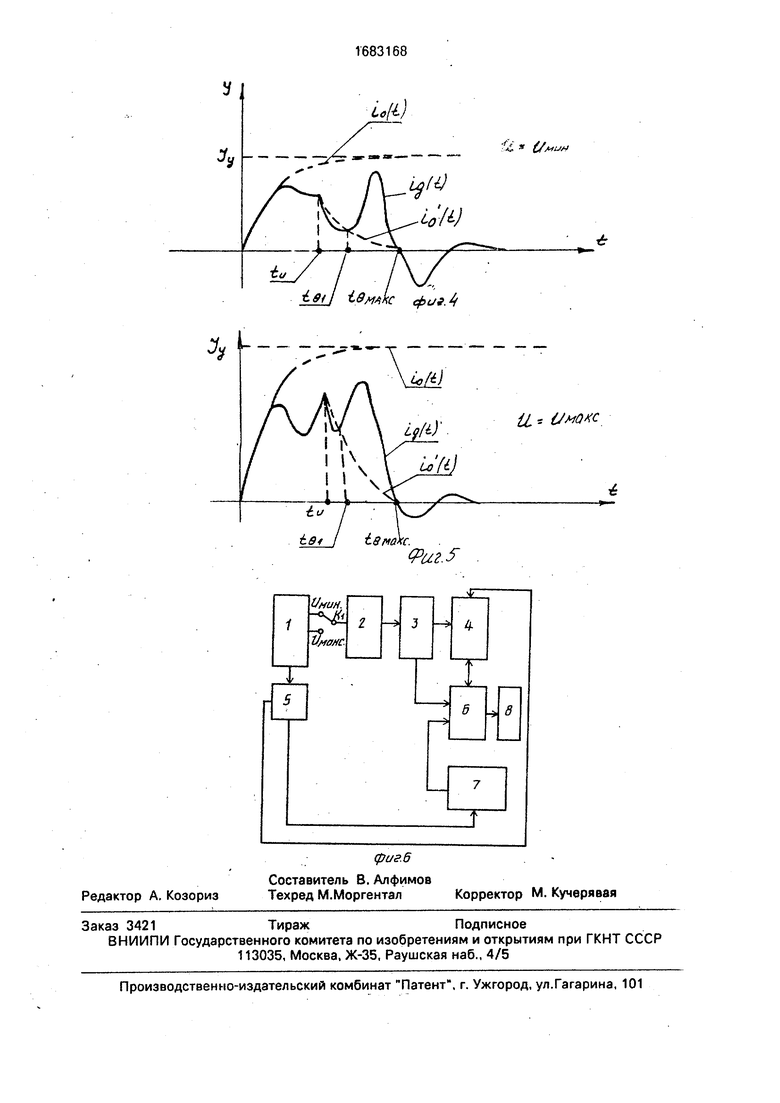
На фиг. 1 показаны составляющие статического синхронизирующего момента в функции угла в поворота ротора; на фиг.2 - график, изменения составляющих и результирующего тока обмотки при совершении шага с непрерывным питанием; на фиг.З - то же, при импульсном питании с номинальным напряжением; на фиг.4 и 5 - то же, при импульсном питании с пониженным и повышенным напряжением; на фиг.6 - функциональная схема устройства, реализующего предлагаемый способ.
На фиг.1 приняты обозначения:
М (в) - суммарный статический синхронизирующий момент;
Мэ (&) активная составляющая (электромагнитный момент);
Мф( в)- реактивная составляющая (фиксирующий момент);
01 - точка устойчивого равновесия активной составляющей момента;
О 00
00
(Ј
00
@о и $о начальная и конечная точки устойчивого равновесия реактивной составляющей момента;
р- стартовое положение ротора относительно точки $1 ;
$maxc максимальное угловое перемещение ротора при движении вперед.
На фиг. 2 показана экспоненциальная зависимость нарастания тока t0(t) °т времени t при заторможенном роторе:
lo(t) ly(1-e т), где 1У - установившееся значение тока в обмотке;
Т - электромагнитная постоянная времен;
iep(t) - зависимость от времени тока, наведенного в обмотке при вращении ротора;
1д(т.) - зависимость от времени тока в обмотке шагового двигателя при отработке двигателем шага.
Первая точка пересечения I0(t) и ifl(t) соответствует времени в прохождения ротором точки 01 {фиг,1) устойчивого равновесия активной составляющей момента. Вторая точка пересечения I0(t) и д(т.) соответствует времени г$макс отклонения ротора на максимальный угол вперед при отработке шага,
На фиг.З показана осциллограмма тока д(т) при импульсном питания двигателя от номинального напряжения, типичная для шаговых двигателей кварцевых наручных часов, где ти - длительность управляемого импульса; io (t) - экспонента тока при заторможенном после окончания импульса роторе.
С целью экономии потребляемой энергии однофазный шаговый двигатель управляется короткими импульсами напряжения, которые заканчиваются раньше, чем ротор отработает шаг. По окончании импульса движение ротора продолжается, что находит отражение в колебательном характере изменения тока в закороченной обмотке двигателя. Наведенный в обмотке ток после окончания импульсов имеет несколько экстремумов.
Первый экстремум (минимум тока положительного знака) соответствует отрицательному экстремуму наведенного в обмотке тока iBp(t) и имеет место вблизи первой точки пересечения id (t) и 1д(г.), т.е. при положении ротора вблизи точки в (фиг. 1) устойчивого равновесия активной составляющей момента.
Второй экстремум (максимум тока поло- жительного знака) соответствует положительному экстремуму наведенного а
обмотке тока I8p(t) и имеет место при положении ротора вблизи точки и устойчивого равновесия реактивной составляющей момента.
Третий экстремум (максимум тока отрицательного знака) имеет место после остановки ротора в точке dmaxc при его
движении назад к точке бо устойчивого равновесия. Таким образом, наличие третьего экстремума наиболее надежно свидетельствует о том, что двигатель отработал
шаг, так как он прошел точку $0 , соответствующую шаговому перемещению.
Согласно изобретению для обеспечения устойчивой отработки двигателем шага в условиях работы в приводе с изменяющейся нагрузкой и напряжением питания осуществляют производственный контроль
отработки двигателем шага только при пониженном или при пониженном и повышенном напряжении и фиксированной нагрузке на валу.
В обоих случаях в качестве критерия
устойчивой отработки шага выбирается наличие третьего экстремума в кривой тока, наведенного в обмотке шагового двигателя после окончания управляющего импульса.
Для контроля устойчивей отработки шага однофазным шаговым двигателем с активным ротором на двигатель подают разнополярные импульсы заданного напряжен, я и длительности, после окончания
каждого импульса проводят в заданном временном интервале поиск экстремума кривой тока, наведенного в обмотке двигателя, при обнаружении экстремума регистрируют устойчивую отработку шага, причем контроль двигателя производят при подаче импульсов номинальной длительности и пониженного напряжения относительно но- инального значения при фиксированной нагрузке на валу, а поиск экстремума кривой тока проводят после первого прохождения тока через нулевое значение.
При грубых отклонениях от заданной геометрии двигателя может оказаться, то соотношение фиксирующего и злектромаг0 нмтного моментов ниже расчетного значения. При этом двигатель обладает избыточной энергией, которая может привести к сбою в его работе (обратному ходу, выбегу) в условиях, близких к холостому хо5 ДУ- Для исключения случаев сбоя в работе шагового двигателя по причине малого фиксирующего момента проверяют устойчи: вость отработки шага при повышенном напряжении питания. При этом устойчивую отработку шага регистрируют лишь при наличии указанных экстремумов тока как при
пониженном, так и при повышенном напряжениях. Число подаваемых на двигатель импульсов каждой полярности и каждого уровня напряжения выбирается больше одного.
На фиг.6 показана функциональная схема одного из устройств, реализующего способ контроля устойчивой отработки шага двигателем с активным ротором.
Генератор 1 разнополярных импульсов, стабилизированных по амплитуде, имеет на выходе каналы с амплитудой импульсного напряжения 11Мии и Кмакс АЛЯ питания обмотки шагового двигателя 2 через ключ К1. Генератор 1 устроен так, что после окончания импульса обмотка шагового двигателя 2 закорачивается.
Преобразователь 3 ток - напряжение преобразует ток шагового двигателя 2 в пропорциональное напряжение, которое подается на детектор 4 уровня, служащий для задания временного интервала поиска экстремума тока шагового двигателя 2.
Детектор 4 уровня срабатывает при появлении на его первом входе напряжения с заданными величиной и знаком. Знак напряжения, на который должен реагировать детектор 4 уровня, задают сигналом коммутатора 5 на втором входе детектора 4 уровня, причем знак сигнала на этом входе изменяется в соответствии с изменением знака сигнала на первом входе, вырабаты- . ваемого генератором 1 разнополярных импульсов.
При положительной полярности сигнала генератора 1 разнополярных импульсов детектор 4 уровня срабатывает на отрицательный сигнал, поступающий от преобразователя 3 ток - напряжение по первому входу. При отрицательной полярности сигнала генератора 1 разнополярных импульсов детектор 4 уровня срабатывает на отрицательный сигнал, поступающий от преобразователя 3 ток - напряжение по первому входу.
Величина напряжения срабатывания задается детектором 4 уровня так, что срабатывание детектора 4 уровня осуществляется вблизи перехода через нуль сигнала, вырабатываемого преобразователем 3 ток - напряжение.
Поскольку напряжение на первом входе детектора 4 уровня пропорционально току шагового двигателя 2, срабатывание детектора по времени совпадает с переходом тока шагового двигателя 2 через нуль.
Таким образом, детектор 4 уровня реализует условие поиска экстремума тока только после прохождения его через нуль.
При поступлении сигнала от детектора 4 уровня срабатывает устройство 6 сравнений, которое сравнивает напряжение преобразователя 3 с заданным (опорным) 5 напряжением, вступающим от стабилизатора 7 опорногс напряжения одновременно с сигналом от г реобразователк 3 ток - напряжение.
Если напряжение, поступающее от пре0 образователя 3 через детектор 4 уровня на устройство 6 сравнения, равно или превышает опорное напряжение, то загорается зеленая лампочка индикатора 8, показывающая наличие третьего экстремума и отра5 ботку двигателем 2 шага.
Если этого не происходит, то по прошествии заданного, определяемого экспериментальным путем, времени, достаточного для поиска третьего экстремума тока, уст0 ройство 6 сравнения посылает на индикатор 8 сигнал, от которого загорается красная лампочка, показывающая, что шаговый двигатель 2 бракованный.
Контроль шаговых двигателей с относи5 тельно большим фиксирующим моментом проводят только при одном положении ключа К1, соединяющего шаговый двигатель 2 с выходом генератора 1 имин.
Контроль шаговых двигателей с относи0 тельно малым фиксирующим моментом проводят при двух положениях ключа К1, соединяющего шаговый двигатель 2 сначала с выходом генератора 1 11мин, в затем - с выходом генератора 1 Умакс. Каждый конт5 роль проводят более одного раза, Годным считают тот шаговый двигатель 2, при контроле которого во всех случаях загорается зеленая лампочка.
Отбраковка по третьему экстремуму то0 ка повышает достоверность и надежность контроля шагового двигателя с активным ротором.
Формула изобретения
1. Способ контроля устойчивой отработ5 ки шага однофазным шаговым двигателем с активным ротором, заключающийся в том, что на обмотку подают разнополярные импульсы с заданными напряжением и длительностью, после окончания каждого
0 импульса проводят в заданном временном интервале поиск экстремума кривой тока, наведенного в обмотке двигателя, при обнаружении экстремума регистрируют устойчивую отработку шага, отличающийся
5 тем, что, с целью повышения достоверности и надежности контроля, указанные разно- полярные импульсы подают с номинальной длительностью и напряжением, пониженным относительно его номинального значения, а поиск экстремума в кривой тока
проводят после первого прохождения тока через нулевое значение.
2. Способ по п.1,отличающийся тем, что дополнительно на обмотку подают
пряжения, повышенного относительн номинального значения, а устойчивую ботку шага регистрируют при наличии занных экстремумов как при пониже
импульсы номинальной длительности и на- 5 так и при повышенном напряжениях.
пряжения, повышенного относительно его номинального значения, а устойчивую отработку шага регистрируют при наличии указанных экстремумов как при пониженном,
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления однофазным шаговым двигателем и устройство для его осуществления | 1980 |
|
SU928593A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1138919A1 |
| Устройство для управления двухпакетным шаговым электродвигателем | 1977 |
|
SU752728A1 |
| Способ контроля кварцевых электронно-механических часов с шаговым двигателем | 1990 |
|
SU1767371A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Способ старт-стопного управления шаговым электродвигателем | 1980 |
|
SU902194A1 |
| Устройство для определения статического момента однофазного магнитоэлектрического шагового двигателя | 1983 |
|
SU1091296A1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1612372A1 |
Изобретение относится к электротехнике и может использоваться при изготовлении и эксплуатации часовых шаговых двигателей. Цель изобретения - повышение достоверности и надежности контроля работоспособности шагового двигателя. Способ заключается в том, что на двигатель подают разнополярные импульсы с заданными величинами двительности и напряжения, после окончания каждого импульса замыкают фазу накоротко, а после перехода тока через нуль проводят в заданном временном интервале поиск экстремума кривой тока, при обнаружении которого регистрируют устойчивую отработку шага. При этом на. двигатель подают импульсы номинальной длительности и пониженного напряжения. Дополнительно подают импульсы номинальной длительности и повышенного напряжения при фиксированной нагрузке на валу, а устойчивую отработку шага регистрируют лишь при наличии указанных экстремумов как при пониженном, так и при повышенном напряжениях. 1 з.п. ф-лы, 6 ил. fe
io{t) us- I
(-о,
id мах с
&
6
tL &,
i
Фиг. 5
| Проспект фирмы WISCHI Electronic A.G, Швейцария, 1989 | |||
| Патент США № 4370065, кл.368/157,1983. |
