Изобретение относится к электротехнике и может быть использовано в робототехнических установках с программным управлением, включающих электропривод с шаговыми двигателями, в частности, линейными одно- или двухкоординатными, и требующих повышенной устойчивости движения и малых динамических ошибок.
Известны способы программного управления разомкнутым и замкнутым электроприводом с шаговым двигателем ШЭП с электрическим дроблением шага при питании обмоток двигателя от источника тока. Разомкнутые структуры ШЭП сочетают в себе возможности глубокого частотного регулирования скорости с возможностями числового задания пути и фиксацией конечных координат.
Недостатком такого способа является наличие значительной динамической ошибки, а также нарушение устойчивости движения при стохастических изменениях нагрузки, превышающей предельную по условиям физической реализации программного движения. Траекторные ошибки, возникающие при отработке приводом программно-заданной траектории, равны динамическим ошибкам и могут достигать целого шага.
Замкнутые структуры ШЭП, строящиеся на основе структур разомкнутого привода с добавлением цепей обратной связи, позволяют повысить устойчивость движения и стабилизировать величину динамической ошибки на определенном уровне, однако требуют оснащения привода специальными датчиками, конструкция которых определяется конструкцией двигателя и видом движения. Как правило, это датчики ускорения или положения. Следует заметить, что реализация замкнутых структур ШЭП с целью достижения требуемого качества движения затруднена, особенно в приводах с двухкоординатными линейными двигателями на аэростатической подвеске подвижного элемента.
Известны также способы экстремального управления, направленные на достижение экстремума некоторой величины критерия оптимальности на основе оценки производной этой величины. При этом на вид объекта накладывается незначительное возмущение модулирующий сигнал, изменяющийся во времени. Это возмущение выделяется на выходе объекта, перемножается с модулирующим сигналом, усредняется и используется для управления объектом.
Недостатком этих способов является то, что они сводятся к поиску и удержанию системы в экстремальной точке характеристики и не обеспечивают работу объекта вне окрестности экстремальной точки.
Наиболее близким к предлагаемому является способ программного управления приводом с шаговым двигателем, подключенным к управляемому инвертору тока, и электрическим дроблением шага, согласно которому осуществляют сравнение заданного управляемого параметра с его текущим значением и изменение тока инвертора в соответствии с результатом сравнения. В качестве управляемого параметра используют электромагнитную мощность, измеряют напряжение и токи на разных обмотках шагового двигателя, вычисляют мгновенное значение электромагнитной мощности, сравнивают ее с программно-заданным значением, их разность преобразуют в сигнал коррекции, который добавляют к программно-заданному воздействию.
Известный способ программного управления ШЭП позволяет повысить устойчивость движения, минимизировать динамическую ошибку.
Недостатком известного способа является нарушение устойчивости движения и значительное увеличение динамической ошибки при стохастических изменениях нагрузки. Это объясняется тем, что изменение тока инвертора в результате изменения параметров привода не поддается прогнозу при составлении программы коррекции. Кроме того, вычисленное значение электромагнитной мощности значительно отличается от фактического из-за конечного быстродействия вычислительного устройства и трудности учета ряда составляющих величины электромагнитной мощности.
Известны устройства для программного управления шаговым электроприводом, которые строятся с использованием электрического дробления шага в сочетании с управляемыми источниками тока. При этом задание программного движения сводится к программному заданию положения (фазы) результирующего вектора тока статора относительно неподвижных осей статора.
Известно также устройство управления шаговым электродвигателем, в котором, в дополнение к фазовому каналу программного управления, введен канал задания программной уставки ускорения. Измеренное акселерометром значение ускорения сравнивается с программной уставкой, а сигнал рассогласования корректирует исходную программу движения, воздействуя через регулятор на фазовый канал программного управления.
К недостаткам известного устройства управления шаговым двигателем можно отнести следующее. Использование локальной обратной связи по ускорению позволяет снизить динамическую ошибку лишь до известных пределов, так как для качественной коррекции в широком диапазоне работы регулятора нелинейной системы управления требуется перестройка его коэффициентов в функции регулируемых параметров, что усложняет систему и снижает эффективность работы устройства.
Наиболее близким к предлагаемому является устройство для управления шаговым электродвигателем, содержащее последовательно соединенные аналого-цифровой преобразователь, цифровой сумматор, цифроаналоговый преобразователь, усилитель мощности, соединенный с фазами шагового двигателя и акселерометр, выход которого подключен к входу избирательного усилителя, перемножитель подсоединен своими входами к выходам избирательного усилителя и функционального генератора пробного сигнала, подключенного к входу аналого-цифрового преобразователя, вход интегратора соединен с выходом перемножителя, а выход с входом опорного напряжения цифроаналогового преобразователя.
К недостаткам известного устройства для управления шаговым электродвигателем можно отнести следующие. Известное устройство предназначено для поддержания момента (усилия) двигателя на оптимальном уровне, т.е. стабилизации значения ошибки на уровне π/2. Таким образом, известное устройство не позволяет контролировать и компенсировать динамическую ошибку в переходных режимах работы привода, в частности, при стохастических изменениях нагрузки. Кроме того, устройство для управления шаговым электродвигателем дает значительную погрешность воспроизведения заданного движения при малых значениях момента (усилия) двигателя вследствие нелинейности угловой характеристики источника шагового перемещения.
Цель изобретения повышение устойчивости движения и минимизация динамической ошибки шагового перемещения при стохастических изменениях нагрузки за счет использования в качестве управляемого параметра угла рассогласования полей статора и ротора шагового электродвигателя (динамической ошибки).
Поставленная цель достигается тем, что в известном способе программного управления шаговым перемещением посредством шагового электродвигателя, подключенного к усилителю мощности, включающем подачу управляющего воздействия, электрическое дробление шага, сравнение заданного управляемого параметра с его текущим значением и изменение тока усилителя мощности в соответствии с результатом сравнения, в качестве управляемого параметра используют угол рассогласования полей статора и ротора, подают на вход поисковое фазовое воздействие, измеряют отклик на поисковое воздействие, выделяют сигнал, содержащий информацию об угле рассогласования, преобразуют сигнал в цифровой код динамической ошибки, сравнивают его с программно-заданным значением, их разность преобразуют в сигнал коррекции, который добавляют к программно-заданному управляющему воздействию.
Поставленная цель достигается также тем, что в шаговый электропривод для реализации способа, содержащий последовательно соединенные цифроаналоговый преобразователь, усилитель мощности, соединенный с фазами шагового электродвигателя, акселерометр избирательный усилитель, перемножитель, интегратор, аналого-цифровой преобразователь, первый сумматор и генератор пробного сигнала, дополнительно введены второй цифровой сумматор, постоянное запоминающее устройство, вычислительный блок, регулятор, преобразователь скорость/положение и фазовращатель, при этом выход интегратора подключен к входу аналого-цифрового преобразователя, выход аналого-цифрового преобразователя соединен с входом постоянного запоминающего устройства, выход которого подсоединен к первому входу первого цифрового сумматора, второй вход которого подключен к выходу вычислительного блока, а выход соединен с регулятором, выход регулятора подключен к первому входу второго цифрового сумматора, второй и третий входы которого подсоединены к выходам преобразователя скорость/положение и генератора поисковых сигналов, а выход подключен к входу цифроаналогового преобразователя, выход генератора поисковых сигналов соединен с входом фазовращателя, выход которого соединен с вторым входом перемножителя.
Использование динамической ошибки как управляемого параметра позволяет при детерминированных условиях работы привода прогнозировать величину момента двигателя, определяющую динамическую ошибку. При этом стохастическое влияние возмущающих факторов возможно лишь в ограниченных пределах и независимо от их природы (т.е. независимо от того, по какой цепи они возникают: электрической, магнитной, механической) фактически величина возникающей динамической ошибки измеряется, сравнивается с программным значением, и величина рассогласования учитывается в законе программного изменения положения результирующего вектора тока статора при поддержании модуля вектора тока неизменным. Управляемый параметр в этом случае играет роль демпфирующего фактора, стабилизирующего поведение подвижного элемента шагового двигателя при воспроизведении заданной траектории движения и минимизирующего мгновенную величину угла рассогласования полей статора и ротора.
Такое управление ШЭП в условиях стохастического изменения нагрузки позволяет повысить устойчивость программного движения и минимизировать величину динамической ошибки привода без применения специальных датчиков положения, а используя лишь легко интегрируемый в конструктив линейных одно- или двухкоординатных шаговых электродвигателей статический датчик-акселерометр с целью коррекции, включенной в устройство управления ШД и позволяющей корректировать программное значение динамической ошибки.
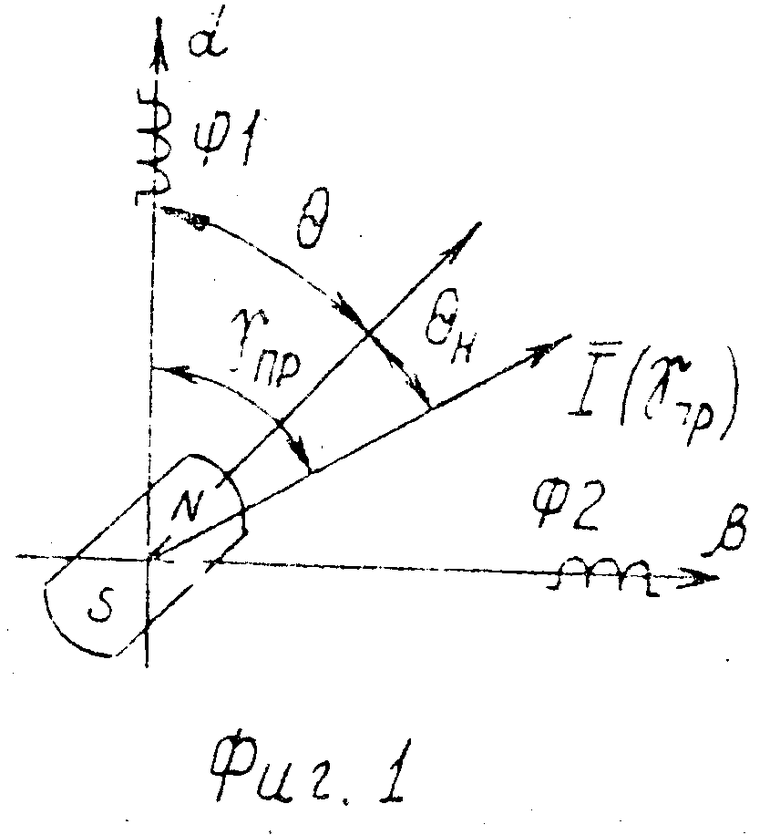
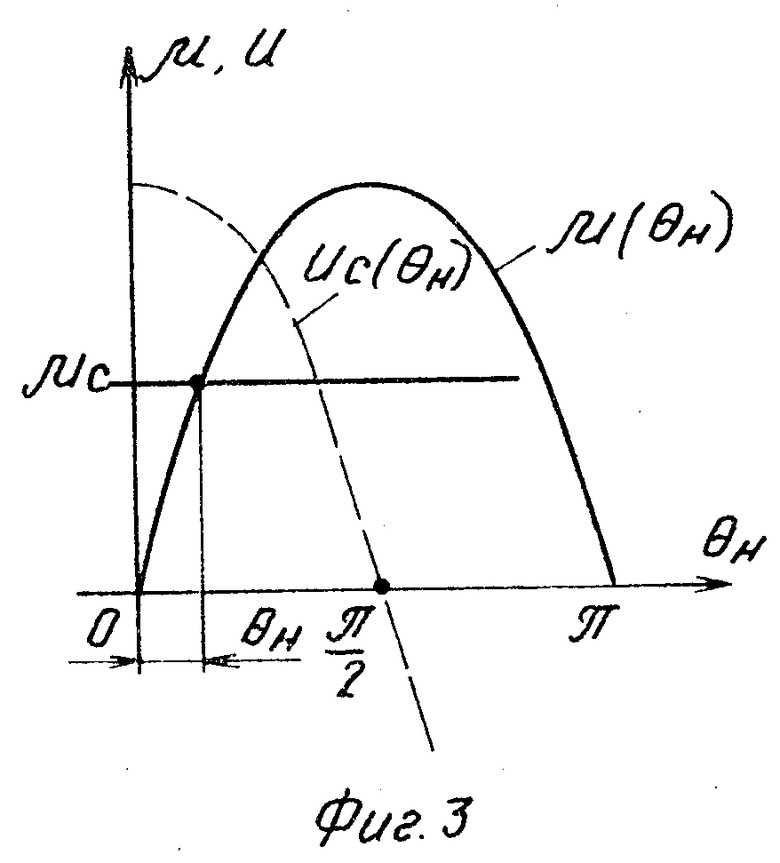
На фиг.1 изображена модель двухфазного электродвигателя; на фиг.2 устройство для реализации способа программного управления шаговым электроприводом; на фиг.3 зависимости усилия двигателя и сигнала коррекции от динамической ошибки привода; на фиг.4 зависимость динамической ошибки от сигнала коррекции.
Сущность способа программного управления ШЭП с коррекцией динамической ошибки отработки траектории движения заключается в следующем. В программно-управляемом ШЭП задание движения сводится к программному заданию положения результирующего вектора тока статора γ относительно неподвижных осей статора при поддержании амплитуды вектора тока неизменной (фиг.1).
Из уравнения, описывающего поведение шагового привода (Ивоботенко Б.А. Козаченко В.Ф. Шаговый привод в робототехнике. М. изд-во МЭИ, 1984):
Ω-2 +
+  + μC im sin(γ-θ) где Ωo собственная круговая частота колебаний ШЭП;
+ μC im sin(γ-θ) где Ωo собственная круговая частота колебаний ШЭП;
β коэффициент эквивалентного вязкого трения;
im относительное значение амплитуды вектора тока статора;
μo относительное значение момента нагрузки;
θ электрическая координата привода,
имеем
γпр= θ+arcsin (t)+βθ(t)+μC
(t)+βθ(t)+μC
Динамическая ошибка, равная углу рассогласования полей статора (индуктора) и ротора (якоря) шагового двигателя, определяется
γпр θ θн arcsin μ, где μ относительное значение развиваемого двигателем усилия (момента).
В приборных робототехнических системах, где возмущающие воздействия на привод детерминированы, можно рассчитать требуемый закон программного изменения скорости (d θ/dt)пр, а также закон программного изменения динамической ошибки θнпр (μ) и реализовать их в виде задания. Стохастическое изменение возмущающих воздействий приведет к отклонению фактического значения θн (t) от θнпр (t). Величину Δ θн θн (t) θнпр (t) можно использовать для целей коррекции программного движения γ ( t ) γпр + Δ γ, где Δ γ f ( Δ θн), при стохастических набросах и сбросах нагрузки.
Динамическая ошибка, как управляемый параметр, обладает следующими преимуществами. Во-первых, она характеризует величину момента вращения двигателя, как функцию угла смещения электромагнитного поля относительно ротора и, следовательно, отражает изменение момента в поле связи статора и ротора в процессе электромеханического преобразования. Во-вторых, для целого класса режимов работы ШЭП со знакопеременным нарушением условий эксплуатации динамическая ошибка изменяется в ограниченных пределах, что позволяет установить эталон сравнения (базу отсчета), а устройство регистрации получить в виде нуль-органа, что обеспечивает высокую точность. В-третьих, использование динамической ошибки в качестве управляемого параметра позволяет не различать физическую природу возмущающего воздействия, т.е. происходит ли воздействие из электрической цепи магнитной цепи, механической цепи.
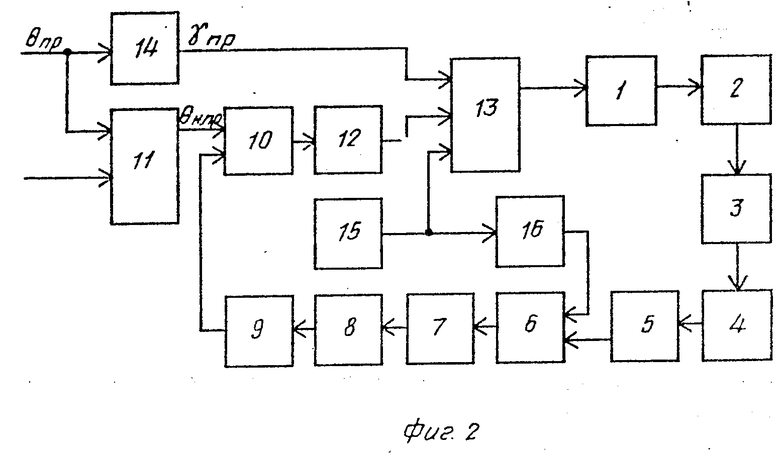
Примером реализации описанного выше способа служит устройство программного управления (фиг. 2), которое состоит из последовательно соединенных цифроаналогового преобразователя 1, усилителя 2 мощности, шагового двигателя 3, акселерометра 4, избирательного усилителя 5, перемножителя 6 и интегратора 7. Выход интегратора 7 подключен к входу аналого-цифрового преобразователя 8, выход которого соединен с входом постоянного запоминающего устройства 9, выход которого соединен с первым входом первого цифрового сумматора 10 для задания сигнала коррекции динамической ошибки привода. Второй вход первого цифрового сумматора 10 является входом задания программного значения динамической ошибки и соединен с выходом вычислительного блока 11, на вход которого задаются параметры привода и характеристики программного движения. Выход первого цифрового сумматора 10 соединен с входом регулятора 12, а выход последнего с первым входом второго сумматора 13. Второй вход второго цифрового сумматора 13 соединен с выходом преобразователя 14 скорость/положение, на вход которого задается программное значение скорости, а третий вход с выходом генератора 15 поисковых сигналов. Выход генератора 15 поисковых сигналов соединен также с входом фазовращателя 16, выход которого подключен к второму входу перемножителя 6. Выход второго цифрового сумматора 13 подсоединен к входу цифроаналогового преобразователя 1.
Устройство для программного управления шаговым электродвигателем работает следующим образом.
Программное воздействие γпр поступающее на второй вход второго цифрового сумматора 13, задает положение результирующего вектора тока статора  (γпр). Смещение вектора
(γпр). Смещение вектора  (γпр) относительно программного положения осуществляется поисковыми воздействиями γп ωп поступающими на третий вход второго цифрового сумматора 13 с выхода генератора 15 поисковых сигналов. Отклик привода на смещение вектора
(γпр) относительно программного положения осуществляется поисковыми воздействиями γп ωп поступающими на третий вход второго цифрового сумматора 13 с выхода генератора 15 поисковых сигналов. Отклик привода на смещение вектора  (γпр) измеряют акселерометром 4 и выделяют в избирательном усилителе 5, настроенном на частоту поиска ωп и подают на первый вход перемножителя 6 подают моделирующий сигнал Uм с частотой тока ωп с выхода генератора 15 поисковых сигналов через фазовращатель 16, осуществляющий фазовый сдвиг модулирующего сигнала. Величина фазового сдвига определяется инерционными свойствами шагового электропривода и задается при его настройке. Перемножитель 6 реализует операцию синхронного детектирования, выделяя сигнал UD, модуль mod Uв которого в среднем пропорционален динамической жесткости угловой характеристики источника шаговых перемещений, а знак syn UD свидетельствует о положении рабочей точки на угловой характеристике привода относительно координаты θн π/2. Сигнал UD усредняется интегратором 7, напряжение с выхода которого Uo поступает на аналого-цифровой преобразователь 8. Цифровой сигнал Nс с выхода аналого-цифрового преобразователя 8 является адресом постоянного запоминающего устройства 9 и поступает на его вход через регулятор 12.
(γпр) измеряют акселерометром 4 и выделяют в избирательном усилителе 5, настроенном на частоту поиска ωп и подают на первый вход перемножителя 6 подают моделирующий сигнал Uм с частотой тока ωп с выхода генератора 15 поисковых сигналов через фазовращатель 16, осуществляющий фазовый сдвиг модулирующего сигнала. Величина фазового сдвига определяется инерционными свойствами шагового электропривода и задается при его настройке. Перемножитель 6 реализует операцию синхронного детектирования, выделяя сигнал UD, модуль mod Uв которого в среднем пропорционален динамической жесткости угловой характеристики источника шаговых перемещений, а знак syn UD свидетельствует о положении рабочей точки на угловой характеристике привода относительно координаты θн π/2. Сигнал UD усредняется интегратором 7, напряжение с выхода которого Uo поступает на аналого-цифровой преобразователь 8. Цифровой сигнал Nс с выхода аналого-цифрового преобразователя 8 является адресом постоянного запоминающего устройства 9 и поступает на его вход через регулятор 12.
Программное воздействие γпр поступающее на второй вход второго цифрового сумматора 13 с выхода преобразователя 14 скорость/положение, есть квазинепрерывное фазовое воздействие, задающее положение результирующего вектора тока статора  (γпр). Смещение вектора относительно программного по определенному закону и обработка сигнала, адекватного реакции привода на это смещение, позволяет выявить мгновенное значение динамической ошибки. Для этого на третий вход второго цифрового сумматора 13 подается поисковый сигнал γ= sign(sinωпt/γ пмaкс), формируемый генератором 15 поисковых сигналов. Частота смены знака сигнала γп определяется максимальным значением полосы пропускания ШЭП, а модуль γпмaкc минимальной реакцией шагового двигателя на принудительное смещение вектора
(γпр). Смещение вектора относительно программного по определенному закону и обработка сигнала, адекватного реакции привода на это смещение, позволяет выявить мгновенное значение динамической ошибки. Для этого на третий вход второго цифрового сумматора 13 подается поисковый сигнал γ= sign(sinωпt/γ пмaкс), формируемый генератором 15 поисковых сигналов. Частота смены знака сигнала γп определяется максимальным значением полосы пропускания ШЭП, а модуль γпмaкc минимальной реакцией шагового двигателя на принудительное смещение вектора  (γпр) достаточной для определения отклика привода на поисковое воздействие Uп акселерометром 4. В зависимости от положения рабочей точки привода на угловой механической характеристике μ ( θн ) величина сигнала Uп, характеризующего смещение вектора
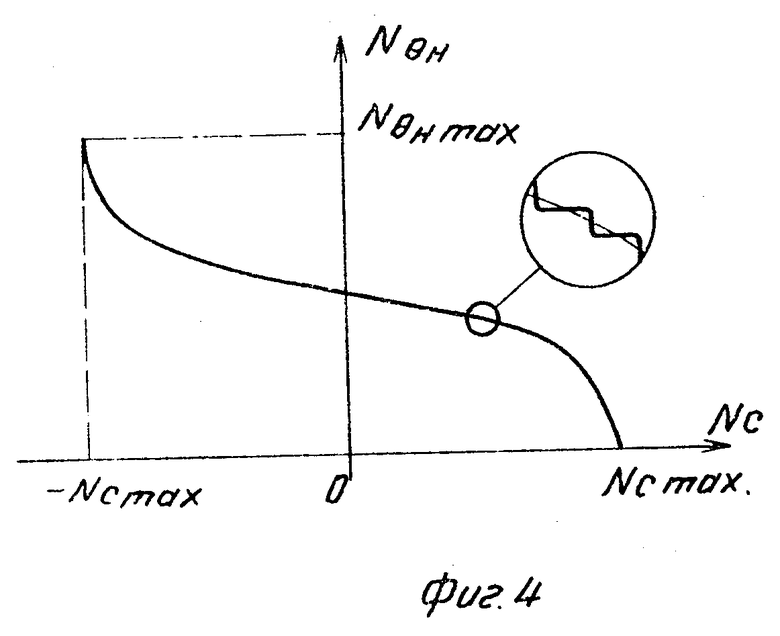
(γпр) достаточной для определения отклика привода на поисковое воздействие Uп акселерометром 4. В зависимости от положения рабочей точки привода на угловой механической характеристике μ ( θн ) величина сигнала Uп, характеризующего смещение вектора  (γпр), варьируется по фазе и амплитуде и выделяется из сигнала U θ с выхода акселерометра 4 избирательным усилителем 5. Произведение величин Uп и модулирующего сигнала Uм А sin(ωпt + ϕ ) поступающего с выхода генератора 15 поисковых сигналов через фазовращатель 16, дает на выходе перемножителя 6 сигнал, который в среднем пропорционален динамической жесткости характеристики μ ( θн ) μмакс cos θн. Сигнал UD усредняется интегратором 7, выходной сигнал Uс которого несет информацию о знаке и модуле динамической ошибки привода θн arccos Uc (фиг.3). Сигнал Uс поступает на аналого-цифровой преобразователь 8, цифровой сигнал Nс с выхода которого является адресом постоянного запоминающего устройства 9, хранящего коды динамической ошибки (фиг.4).
(γпр), варьируется по фазе и амплитуде и выделяется из сигнала U θ с выхода акселерометра 4 избирательным усилителем 5. Произведение величин Uп и модулирующего сигнала Uм А sin(ωпt + ϕ ) поступающего с выхода генератора 15 поисковых сигналов через фазовращатель 16, дает на выходе перемножителя 6 сигнал, который в среднем пропорционален динамической жесткости характеристики μ ( θн ) μмакс cos θн. Сигнал UD усредняется интегратором 7, выходной сигнал Uс которого несет информацию о знаке и модуле динамической ошибки привода θн arccos Uc (фиг.3). Сигнал Uс поступает на аналого-цифровой преобразователь 8, цифровой сигнал Nс с выхода которого является адресом постоянного запоминающего устройства 9, хранящего коды динамической ошибки (фиг.4).
Nθн= ent 1-arccos
1-arccos signV
signV где Nэл.сост. Кдрn число электрических состояний двигателя;
где Nэл.сост. Кдрn число электрических состояний двигателя;
Кдр коэффициент дробления шага;
n число электрических состояний при отсутствии электрического дробления шага. Код N θн подается на первый вход первого цифрового сумматора 10 и определяет дискретное фазовое управление γb N θн αдр, где αдр- величина дробного шага двигателя. На второй вход первого цифрового сумматора 10 подается программно-заданное значение динамической ошибки, получаемое в вычислительном боке 11 в результате расчета на основании данных АСНИ о параметрах привода и характеристиках программного движения согласно выражения θнarcsin μ (функция arcsin аппроксимируется полиномами Ньютона второго порядка в диапазонах изменения момента μ 0 0,75 и μ 0,75 0,95 с ошибкой не превышающей половины дробного шага). Результат сравнения фактического и программно-заданного значения аналитической ошибки является сигналом, который подается с выхода первого цифрового сумматора 10 на вход регулятора 12 (ПИ-регулятор), а с выхода последнего сигнал коррекции Δ γc добавляется к программно-фазовому управляющему воздействию γпр, поступающему с выхода блока 14 посредством суммирования в блоке 13. Сигнал управления с выхода блока 13 поступает на вход цифроаналогового преобразователя 1, реализующего функцию электрического дробления шага с выдачей на вход усилителя мощности 2 синусно-косинусных зависимостей токов фаз двухфазного двигателя в функцию программного значения частоты вращения привода. Сигналы задания токов фаз двигателя поступают на усилитель мощности 2, выполняющий функции источника тока. Выходы блока 2 подсоединены к магнитоэлектрическому шаговому двигателю 3.
Таким образом, любое стохастическое изменение возмущающего воздействия приводит к формированию в цепи коррекции дискретного фазового сигнала, который компенсирует вызвавшее это изменение воздействие.
Величина траекторной ошибки при данном способе программного управления ШЭП снижается до величины δтр ≅ 0,1 α где α целый шаг двигателя.
Привод характеризуется устойчивой работой при стохастических изменениях возмущающих воздействий в диапазоне, не превышающем максимальные физические возможности привода при воспроизведении траекторного движения.
Использование заявляемого способа программного управления шаговым перемещением посредством шагового электродвигателя и устройства для его реализации позволяет обеспечить по сравнению с известными следующие преимущества:
в условиях стахостатического изменения нагрузки повышается устойчивость программного движения, так как любое возмущение компенсируется дискретным фазовым управляющим воздействием, чем и обеспечивается заметный демпфирующий эффект, стабилизируется мгновенное положение подвижного элемента шагового электродвигателя;
минимизируется динамическая ошибка привода за счет использования в качестве управляемого параметра угла рассогласования полей статора и ротора шагового электродвигателя.
Способ программного управления шаговым перемещением посредством шагового электродвигателя и устройство для его реализации позволяют отказаться от использования датчиков обратной связи по положению подвижного элемента, унифицировать структуру ШЭП независимо от конструкции шагового электродвигателя, стабилизировать переходные режимы работы привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| Устройство для управления шаговым электродвигателем | 1989 |
|
SU1612370A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1986 |
|
SU1403332A1 |
| Способ калибровки шагового электродвигателя | 1977 |
|
SU653713A1 |
| Замкнутый шаговый электропривод | 1988 |
|
SU1511840A2 |
| Устройство для управления шаговым электродвигателем | 1977 |
|
SU736333A1 |
| Устройство для управления шаговым электродвигателем | 1981 |
|
SU1032584A2 |
Изобретение относится к электротехнике и может быть использовано в робототехнических установках с программным управлением, включающих электропривод с шаговым двигателем. Цель изобретения повышение устойчивости привода и минимизация его динамической ошибки при стохастических изменениях нагрузки за счет использования в качестве управляемого параметра угла рассогласования полей статора и ротора ШД. Способ заключается в подаче на вход привода управляющего воздействия, электрическом дроблении шага, сравнении заданного управляемого параметра с его текущим значением и изменении тока управляемого источника тока в соответствии с результатом сравнения, при этом на вход подают поисковое фазовое воздействие, измеряют на выходе привода отклик на него, выделяют сигнал, содержащий информацию об угле рассогласования, преобразуют сигнал в цифровой код, сравнивают его с программно заданным значением, их разность преобразуют в сигнал коррекции, который добавляют к программно заданному управляющему воздействию. 2 с.п. ф-лы, 4 ил.
| Устройство для управления шаговым электродвигателем | 1989 |
|
SU1612370A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
