.113
Изобретение относит1 я к управлению электрическими машинами и может быть использовано в замкнутьк шаговых электроприводах,
изобретения является увеличение быстродействия путем повышения динамического усилия или момента.
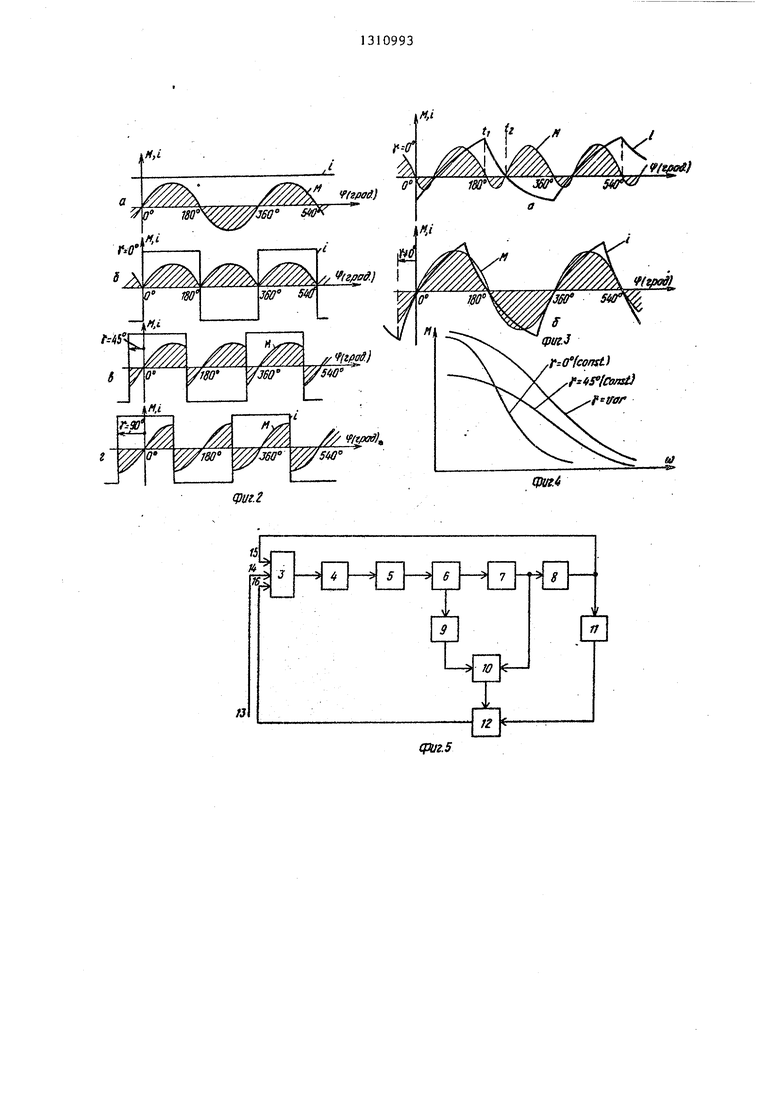
На фиг.Ч показан шаговый электродвигатель, поперечньй разрез; на фиг. 2 - зависимости тока и момента двигателя.от углового положения рото ра при различных углах коммутации без учета индуктивностей фаз; на фиг. 3 - то же, с учетом индуктивности фаз; на фиг. 4 механические характеристики двигателя при различных способах коммутации; на фиг.5 - структурная блок-схема устройства; на фиг. б - временные диaгpa мы, по- ясняю1цие работу устройства; на фиг. 7 - схема логического сумматора.
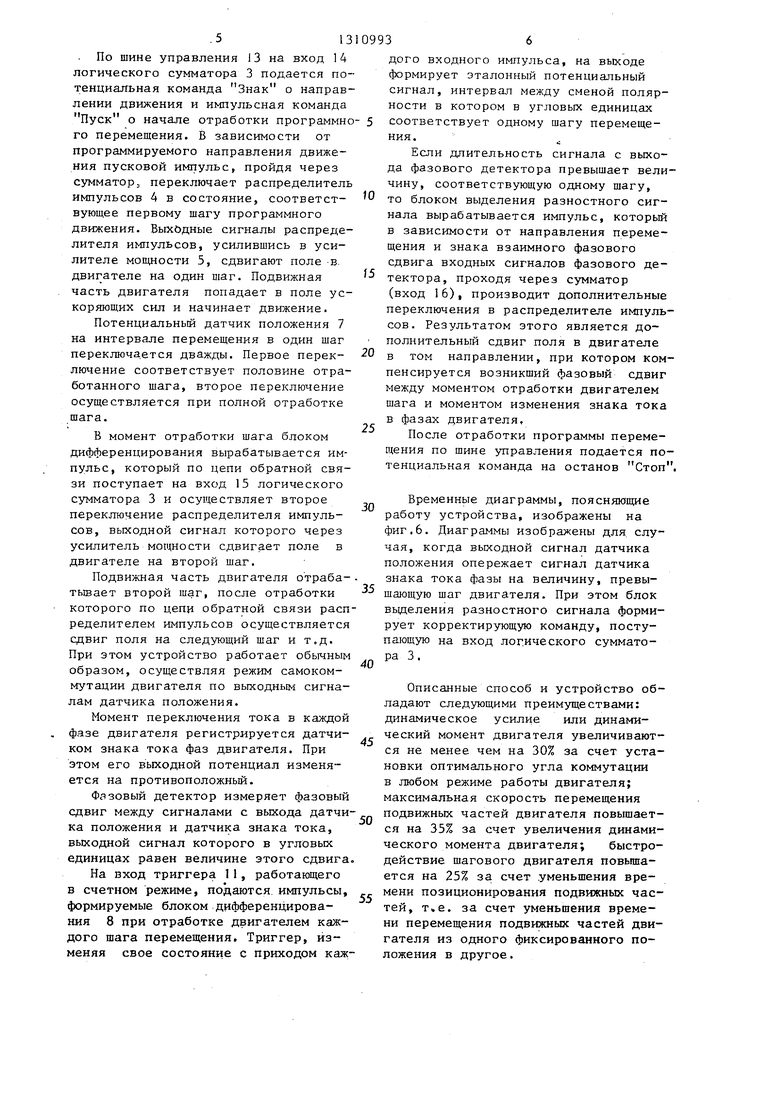
На фиг. .представлен в качестве примера двухфазный магнитоэлектрический двигатель, состояш й из неподвижного якоря 1 с полюсами, охваченными катушками двухфазной о бмотки, и подвижный вторичный элемент (ротор 2 в виде двухполюсного постоянного магнита. Данный двигатель не является обязательным для реализации способа. Способ может быть применен к индукторному двигателю с невозбужденным зубчатым вторичным элементом (ротором) или к линейному электродвигателю с подвижным якорем и безобмоточной зубчатой направляющей (вторичным элементом).
Устройство для управления шаговь М двигателем (см.фиг.5) содержит последовательно соединенные логический сумматор 3, реверсивный распределитель импульсов 4, усилитель мощности 5, шаговый двигатель 6, потенциальный датчик положения 7 подвижной части двигателя, блок дифференцирования 8, соединенный с двигателем 6, датчик знака тока фаз двигателя 9, .соединенный с ним и датчиком положения 7, фазовый детектор JO, триггер I1, блок выделения разностного сигнала 12. Шина входных комйнд }3 соединена с входами 14 логического сумматора 3, к входу 15 которого подключен выход блока диффер енцирования 8, а к входу 16 - блок выделения разно:- стного сигнала 12, Блок выделения разностного сигнала 12 имеет два выхода. Появление сигнала на том или другом выходе.оп09932
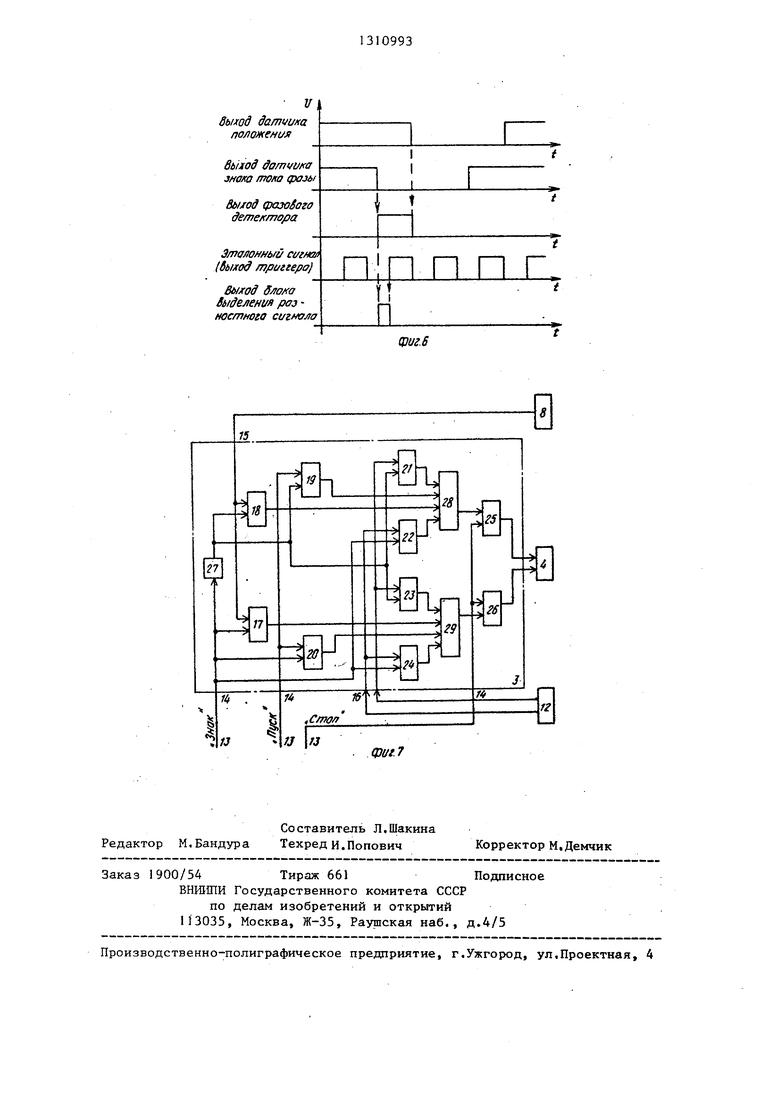
ределяется знаком фазового сдвига сигналов с выходов блоков 9 и 7. Логический сумматор включает 10 логических элементов И 17-26, инвер- 5 тор 27, два логических элемента
ИЛИ 28, 29. У распределителя импульсов 4 имеется два входа. При подаче импульсной последовательности на первый вход осуществляется сдвиг поля W двигателя в одном направлении, пода- че импульсов на второй вход соответствует сдвиг поля двигателя в обратном направлении. 1
5 При возбуждении одной или обоих фаз двигателя (фиг.1) постоянным током i возникает момент взаимодействия полюсов ротора с возбужденньп 1И полксами статора М, который является 20 периодической функцией углового положения ротора 1/(фиг.2), На фиг. 2 а показан момент, соответствующий возбуждению фазы А двигателя на фиг.1. При возбуждении фазы В возникает мо- 2-5 мент, сдвинутый в пространстве на 90 эл.град. относительно момента, возникающего при возбуждении фазы А, Среднее значение момента за период его изменения при возбуждении фаз 30 двигателя постоянным током равно О. Двигатель развивает однонаправленный момент при коммутации его фаз, т.е. при периодическом изменении нап- равления тока фаз двигателя. Суммар- 35 ный момент двигателя равен сумме моментов от взаимодействия полюсов отдельных фаз с полюсами ротора, однако, не теряя общности, основные закономерности взаимодействия полюсов 40 фаз статора с полюсами ротора можно проследить на примере взаимодействия одной фазы двигателя.
При замкнутом сцособе управления коммутация фаз осуществляется по 45 сигналам датчика положения (датчик не показан) в определенных i положениях ротора. Среднее значение момента, развиваемого полюсами каждой фазы, а значит, и среднее зна- 50 чение момента двигателя в целом зависит от угла коммутации. На фиг. 2б, виг показаны зависимости момента, развиваемого при взаимодействии полюсов возбужденной фазы якоря дви- 55 гателя с ротором, от углового положения ротора ( относительно полюсов этой фазы при углах коммутации -у, равных 0,45 и 90. Там же показан характер изменения фазного тока i
313
без учета времени коммутации тока, вызванного индуктивностью фазной обмотки. Данное допущение справедливо при небольших скоростях вращения ротора, когда время нарастания и спада тока в фазе мало по сравнению с периодом ее коммутации.
Как видно из зависимостей на фиг. 2, среднее значение момента, развиваемого полюсами возбужденной фазы двигателя, имеет максимальное значение при угле коммутации У , равном нулю. При этом изменение направления тока фазы происходит в момент совпадения полюсов ротора с полюсами данной фазы и отсутствуют интервалы перемещения ротора, когда на него действует отрицательный момент по отношению к направлению вращения ротора. Последнее является критерием максимизации момента, развиваемого полюсами фазы и всего двигателя в целом. Из характеристик на фиг.2 следует, что с увеличением угла коммутации средний момент полюсов фазы уменьшается и при т 90 становится равным О.
С ростом частоты коммутации фаз (скорости вращения ротора) время переходного процесса изменения тока фазы становится соизмеримо с периодом его коммутации. Моменты начала коммутации (точка t на фиг.З) и моменты изменения направления тока фазы (точка t на фиг.З) не совпадают. При этом даже при угле коммутации
Г 0° возникают интервалы перемещения, на которых к ротору прикладывается отрицательный момент, уменьшающий среднее значение динамического момента и снижающий быстродействие двигателя.
Для увеличения динамического момента двигателя угол коммутации с ростом скорости вращения ротора необходимо увеличивать.При этом критерий максимизации момента остается тем же, что и при небольшой скорости вращения - отсутствие интервалов перемещения ротора, когда на него воздействует отрицательный момент по отношению к направлению вращения ротора. Последнее условие соблюдается, если ток фазы меняет своё направление (переходит через нуль) в момент совпадения полюсов фазы и полюсов ротора (фиг.З). Это определяет оптимальный закон регулирования угла ком34
мутации двигателя, обеспечивающий максимизацию,момента двигателя во всем диапазоне изменения скорости вращения ротора. При любой скорости
вращения ротора угол коммутации должен быть таким, чтобы ток каждой фазы изменял свое направление в момент совпадения полюсов данной фазы с полюсами ротора.
Однако определение конкретного значения оптимального увла коммутации затруднительно, так как оно зависит от ряда параметров двигателя (индуктивность и сопротивление фазных
обмоток, ЭДС вращения ротора и т.д.), точное определение которых не всегда возможно.
На фиг.4 зависимости момента от частоты вращения соответствуют отсутствию регулирования угла коммутации ( -У f 45° во всем диапазоне изменения скорости). Кривая у var соответствует изменению момента двигателя с роистом скорости вращения при условии регулирования угла коммутации по оптимальному закону.
Способ управления шаговым двигателем заключается в следующем. В каждый цикл коммутации фазы двигателя определяют отклонение угла коммутации от оптимального значения путем измерения интервала перемещения между моментом совпадения полюсов фазы
с полюсами ротора (t, на фиг.З) и моментом изменения направления тока фазы (tj на фиг.З).
В численном выражений данный интервал пропорционален углу коммутации, В последующий цикл коммутации угол коммутации изменяют на величину отклонения с целью достижения оптимального угла коммутации, когда
точка совпадения полюсов фазы с полюсами ротора соответствует точке изменения направления тока фазы.
Способ обеспечивает регулирование угла коммутации по оптимальному
закону во всем диапазоне изменения скорости вращения ротора, независимо от режима работы двигателя, изменения нагрузки на валу, изменения параметров двигателя в процессе эксплуатации.
Устройство для управления шаговым двигателем работает следующим образом.
.513
По шине управления 13 на вход 14 логического сумматора 3 подается потенциальная команда Знак о направлении движения и импульсная команда Пуск о начале отработки программного перемещения. В зависимости от программируемого направления движения пусковой импульс, пройдя через сумматор- переключает распределитель импульсов 4 в состояние, соответствующее первому шагу программного движения. БыхЬдные сигналы распределителя импульсов, усилившись в усилителе мощности 5, сдвигают поле -в. двигателе на один шаг. Подвижная часть двигателя попадает в поле ускоряющих сил и начинает движение.
Потенциальный датчик положения 7 на интервале перемещения в один шаг переключается дважды. Первое переключение соответствует половине отработанного шага, второе переключение осуществляется при полной отработке шага.
В момент отработки шага блоком дифференцирования вырабатывается импульс, который по цепи обратной связи поступает на вход 15 логического сумматора 3 и осуществляет второе переключение распределителя импульсов, выходной сигнал которого через усилитель мощности сдвигает поле в двигателе на второй шаг.
Подвижная часть двигателя отрабатывает второй шаг, после отработки которого по цепи обратной связи распределителем импульсов осуществляется сдвиг поля на следующий щаг и т.д. При этом устройство работает обычным образом, осуществляя режим самокоммутации двигателя по выходным сигналам датчика положения.
Момент переключения тока в каждой фазе двигателя регистрируется датчиком знака тока фаз двигателя. При этом его выходной потенциал изменяется на противоположньй.
Фазовый детектор измеряет фазовый сдвиг между сигналами с выхода датчика положения и датчика знака тока, выходной сигнал которого в угловых единицах равен величине этого сдвига
На вход триггера 1I, работающего в счетном режиме, подаются, импульсы, формируемые блоком дифференцирования 8 при отработке двигателем каждого шага перемещения. Триггер, изменяя свое состояние с приходом каж36
дого входного импульса, на выходе формирует эталонный потенциальный сигнал, интервал между сменой полярности в котором в угловых единицах соответствует одному шагу перемещения.
Если длительность сигнала с выхода фазового детектора превышает величину, соответствующую одному шагу,
то блоком выделения разностного сигнала вырабатывается импульс, которьй в зависимости от направления перемещения и знака взаимного фазового сдвига входных сигналов фазового детектора, проходя через сумматор (вход 16), производит дополнительные переключения в распределителе импульсов. Результатом этого является дополнительный сдвиг поля в двигателе
в том направлении, при котором компенсируется возникший фазовый сдвиг между моментом отработки двигателем шага и моментом изменения знака тока в фазах двигателя.
После отработки программы перемещения по шине управления подается потенциальная команда на останов Стоп.
Временные диаграммы, поясняющие работу устройства, изображены на фиг,6. Диаграммы изображены для случая, когда выходной сигнал датчика положения опережает сигнал датчика знака тока фазы на величину, превы- тающую шаг двигателя. При этом блок выделения разностного сигнала формирует корректир ующую команду, поступающую на вход логического сумматоР
Описанные способ и устройство обладают следующими преимуществами: динамическое усилие или динамический момент двигателя увеличиваются не менее чем на 30% за счет установки оптимального угла коммутации в любом режиме работы двигателя; максимальная скорость перемещения подвижных частей двигателя повышается на 35% за счет увеличения динамического момента двигателя; быстродействие шагового двигателя повышается на 25% за. счет уменьшения вре- мени позиционирования подвижных частей, . за счет уменьшения времени перемещения подвижных частей двигателя из одного фиксированного положения в другое.
Формула
7131
изобретения
1.Способ управления шаговым двигателем с явнополюсными якорем и индуктором, состоящий в том, что при движении индуктора- фиксируют моменты совпадения осей полюсов якоря и индуктора, задерживают сигнал о совпадении указанных осей и коммутируют катушки фаз якоря задержанным сигналом, отличающийся тем, что, с целью увеличения быстродействия путем повышения динамического усилия или момента, дополнительно измеряют интервал между моментами совпадения осей полюсов индуктора и якоря и перехода тока фазной катушки через ноль и изменяют длительность задержки сигнала при следующей коммутации на величину указанного интервала.
2,Устройство для управления шаговым двигателем, содержащее сумматор, распределитель импульсов,усилитель мощности, блок дифференци38
рования, датчик положения, соединенный выходом с блоком дифференцирования, а входом - с подвижной частью шагового двигателя, фазные обмотки
которого через усилитель мощности подключены к выходу распределителя импульсов, подключенного входом к выходу сумматора, соединенного первым входом с шиной управления, о тличающееся тем, что, с целью увеличения быстродействия путем повышения динамического усилия или момента, оно снабжено датчиком знака тока фаз, фазовым детектором,
триггером и блоком выделения ра-зност- ного сигнала, подключенным выходом к второму входу сумматора, первым входом - через триггер к выходу блока дифференцирования, вторым входом к фазовому детектору, первый вход которого связан с выходом датчика положения, а второй подключен к дат25
чику знака тока фаз, при этом выход блока дифференцирования соединен с третьим входом сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1982 |
|
SU1081622A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Устройство для управления шаговым двигателем | 1974 |
|
SU552913A3 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Способ управления вентильным двигателем и устройство для его осуществления | 1979 |
|
SU807973A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Устройство стартстопного управления четырехфазным шаговым двигателем | 1987 |
|
SU1494196A1 |
| Замкнутый шаговый электропривод | 1984 |
|
SU1259465A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
Изобретение относится к электротехнике , к управлению электрическими машинами и может быть использо- вано в замкнутых шаговых электроприводах. Целью изобретения является увеличение быстродействия путем повышения динамического усилия или момента. Способ управления шаговым двигателем (ВД) заключается в том, что в каждый цикл коммутации фазы двигателя определяют отклонение угла коммутации от оптимального значения путем измерения интервала перемещения между моментом совпадения полюсов фазы с полюсами ротора и моментом изменения направления тока фазы, который пропорционален углу коммутации. Способ обеспечивает регулирование угла коммутации по оптимальному закону во всем диапазоне изменения скорости вращения ротора независимо от режима работы ШД. Быстродействие повышается за счет уменьшения времени перемещения подвижных частей ЦЩ из одного фиксированного положения в другое. Приведено устройство для осуществления предложенного способа управления ЩЦ, 2 с.п,ф-лы, 7 ил. (Л С
6 О о
Фиг.1
q)Vi.2
Фиг.
:fC
jsk 9
JL fj
19
-
п
20
«№
tCmo/r
// /J
Составитель Л.Шакина Редактор М,Бандура Техред и.Попович Корректор м.Демчик
Заказ 1900/54 Тираж 661Подписное
ВНИНПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная, 4
2}
rU
г8
гг
-Л
2J
4
/i
да
/4
f
/«
OTy/ 7
| Гумен В.Ф., Калининская Т,В | |||
| Следящий шаговый электропривод | |||
| Л.: Энергия, 1980, с.4 | |||
| Патент Cl lA № 4044881, кл.197-82, 1977. |
