Известны фотоэлектронные следящие устройства, использующие в качестве чувствительного элемента диссектор, на фотокатод которого проецируют точечное изображение объекта слежения с последующей разверткой возникающего электронного изображения в плоскости диафрагмы, размещенной за фотокатодом. Эти устройства высоко чувствительны и точны, но требуют отклонения электронного изображения в двух направлениях для осуществления круговой, спиральной и т. п. развертки.
Предлагаемое фотоэлектронное следящее устройство ирзволяет определять отклонение объекта слежения в двух взаимно нерпендикулярных направлениях путем развертки изображения только в одном, например горизонтальном, направлении благодаря выполнению диафрагмы в форме прямоугольного треугольника, катеты которого ориентированы относительно координатных осей. В устройстве использованы фазовые дискриминаторы для определения смещения объекта слежения путем измерения сдвига переднего фронта рабочего импульса на выходе диссектора относительно опорного импульса, соответствующего нулевому отклонению, и измерения длительности этого рабочего импульса. Для осуществления перехода устройства от режима поиска к режиму слежения предусмотрено коммутирующее
приспособление, управляемое схемой «И, осуществляющей сравнение трех видов сигналов: соответствующих заднему фронту импульса на выходе диссектора, задержанному переднему фронту имнульса и опорного. Для обратного переключения устройства предлагается блок формирования синхроимпульсов и выход диссектора подключать к кoммyтиpyющeJмy приспособлению через декадный счетчик. Повыщение точности нри работе в режиме слежения обеспечивается понилсением амплитуды пилообразного напряжения, питающего отклоняющие системы, достигаемым одновременно с переходом в режим слел ;ения.
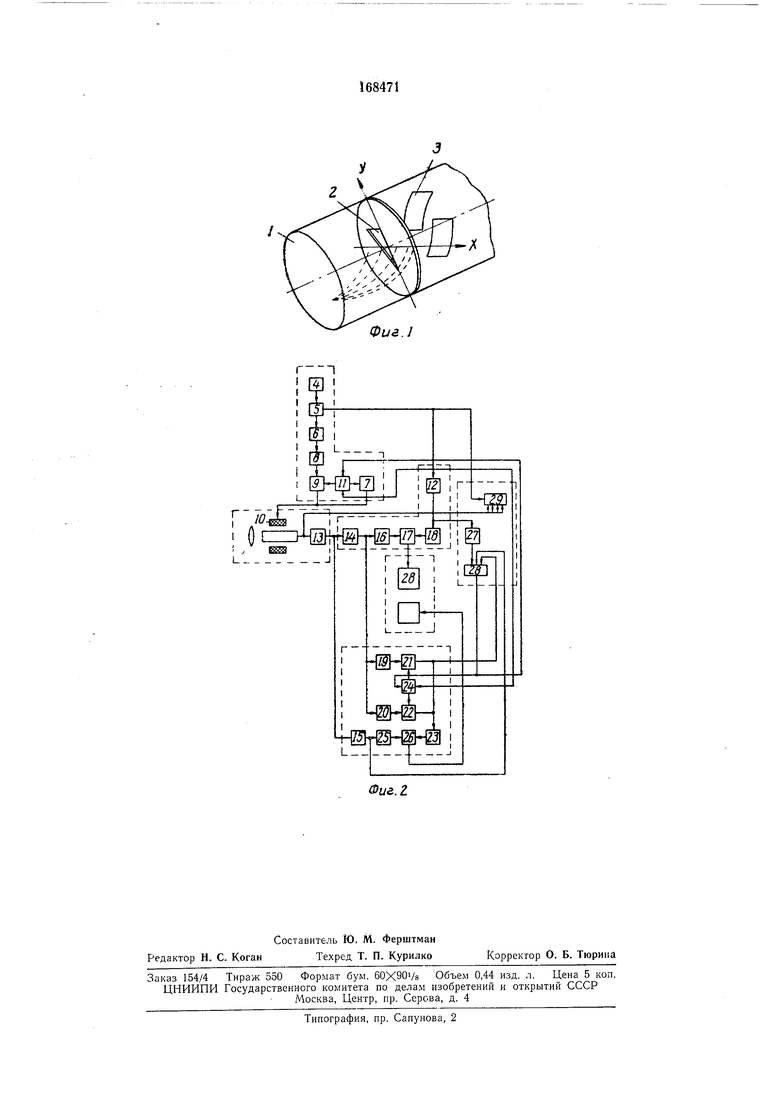
На фиг. 1 изображен датчик предлагаемого устройства; на фиг. 2 - функциональная схема устройства.
На фотокатод / диссектора спроецировано изображение объекта слежения. С помощью горизонтальной развертки (отклоняющая система на фиг. 1 не показана) развертывают, например в горизонтальном направлении, возникающее электронное изображение (эмитируемый с фотокатода поток электронов) в плоскости диафрагмы 2, размещенной перед первым динодом фотоумножителя 5. Диафрагма выполнена в виде прямоугольного треугольника, один из катетов которого совмещен с осью Y ординат прямоугольной системы координат. Другой катет параллелен оси Jf и направлению развертки.
Работает устройство следующим образом.
Колебания задающего генератора 4 поступают в блок 5 формирования синхроимпульсов генератора 6 развертки. Одновременно синхроимпульсы передаются в блок слежения по X, где они используются в качестве опорных. Пилообразное напряжение генератора развертки поступает в вентиль 7 и уменьшенное по амплитуде в п раз аттенюатором 8 - в вентиль 9. С вентилей 7 и 9 (в зависимости от режима работы) напряжение развертки передается к отклоняющей системе 10 диссектора. Включение и выключение вентилей (переключение режима работы) производится ключом //.
Поток светового излучения от контролируемого объекта через объектив устройства направляется на светочувствительную поверхность диссектора (катод). При попадании изображения объекта светового излучения на катод диссектора он эмитирует фотоэлектроны. Поток фотоэлектронов отклоняющей системой перемещается перед диафрагмой в горизонтальном направлении справа - налево. Пролетая диафрагму, фотоэлектроны попадают на первый динод фотоумножителя диссектора, на выходе которого появляется рабочий импульс, несущий информацию о положении объекта. Временное положение переднего фронта рабочего импульса относительно опорного (синхроимпульс, сдвинутый во времени в линии задержки 12 па половину периода развертки) определяет смещение объекта по оси X.
Рабочий импульс с выхода диссектора дифференцируется в блоке 13. Полученная последовательность импульсов (от переднего и заднего фронтов рабочего импульса) поступает на входы односторонних ограничителей 14 и 15, разделяющих их по полярности. Положительные импульсы с выхода ограничителя 14 передаются на триггер 16 со счетным входом, который формирует последовательность измерительных импульсов, поступающих в фазовый дискриминатор 17 для сравнения по фазе с последовательностью импульсов триггера 18 (опорные импульсы). Когда объект излучения находится на оптической оси устройства, импульсы триггера 16 совпадают по фазе с импульсами триггера 18 и на выходе фазового дискриминатора 17 напряжения нет. При от-: клонении объекта слежения влево или вправо от оси импульсы с триггера 16 соответственно отстают или опережают опорные. На выходе фазового дискриминатора появляется напряжение соответствующей величины и полярности, которое в дальнейкхем используется в сервосистеме.
личину длительности рабочего импульса (при поиске и слежении), соответствующего нулевому отклонению объекта слежения по оси У Задержанные импульсы передаются вентилям 2/ и 22, которые в зависимости от режима работы пропускают их в формирующий триггер 23. Включение и выключение вентилей 21 и 22производится ключом 24. Ограничитель 15, выделяя импульсы от заднего фронта рабоче-
го импульса, передает их в формирующий триггер 25. Сигналы с триггеров 25 и 23 сравниваются по фазе в фазовом дискриминаторе 26. На выходе фазового дискриминатора 26 появляется напряжение, пропорциональное
сдвигу фаз.
В момент совмещения оптической оси устройства с направлением на контролируемый объект происходит совпадение во времени трех импульсов: с выхода ограничителя 15
(импульс от заднего фронта рабочего импульса) ; с выхода линии задержки 19 (задержанный импульс от переднего фронта рабочего импульса) и с выхода линии задержки 27 (опорный импульс, задержанный на величину
длительности рабочего импульса, соответствующего нулевому отклонению объекта). Названные импульсы поступают в схему «.И 28, на выходе которой появляется командный импульс перехода к режиму слежения. Командный импульс подается на ключи 11 н 24, которые включают соответствующие вентили.
Переход к режиму поиска происходит следующим образом. Управляющие импульсы с блока 5 поступают на вход декадного счетчика импульсов 29. Когда на выходе диссектора есть рабочий импульс, счетчик не работает, так как рабочий импульс постоянно возвращает его к нулевому состоянию. Если в режиме слежения контролируемый объект по каким-либо причинам выходит из пределов угла обзора устройства, на выходе диссектора рабочий импульс не появляется. Если в течение десяти циклов сканирования (с приходом десяти импульсов с блока развертки) рабочий
имнульс не появляется, с выхода декадного счетчика к ключам 11 н 24 поступает командный импульс перехода к режиму поиска.
При переходе к режиму слежения определение величины отклонения объекта от оптической оси устройства производится с большей точностью, чем при поиске. Если амплитуда отклоняющего напряжения генератора раз-, вертки равна А, что обеспечивает перемещение электронного изображения объекта на ве-.
личину d и период Т, то скорость развертки
будет VP - --. В начальный момент оптиче-:
ское изображение объекта находится в точке В фотокатода диссектора. По сигналу рассогласования Их сервосистема стремится совместить изображение объекта с осью У прямоугольной системы координат. Однако полного совмещения не происходит ввиду конечной величины чувствительности фазовых дискрими-менныи сдвиг между опорным импульсом и передним .фроитом импульса диссектора уменьшился до величины т, на которую устройство не реагирует, то оптическое изображение объекта занимает положение В на поверхности фотокатода диссектора. Остаточному временному рассогласованию т соответствует линейная величина h на поверхности фотокатода, с помощью которой определяется точность отслеживания объекта. Величина h - . Оставив период развертки прежним, уменьшим амплитуду отклоняюш.его напряжения, сделав ее равной - ; перемещение электронного изображения объекта соответственно уменьшится в 10 раз до величины -. Скорость развертки будет . Так как величина т осталась прежней, величина h уменьшится до значения: /Zi -- . Таким образом, в идеальном случае, получаем выигрыш в точности в 10 раз. Приведенные отношения справедливы и для слежения по оси У. Предмет изобретения 1. Фотоэлектронное следящее устройство, использующее в качестве чувствительного элемента диссектор, на фотокатод которого проецируют точечное изображение объекта слежения с последующей разверткой возникающего электронного изображения в плоскости диафрагмы, размещенной за фотокатодом, отличающееся тем, что, с целью слежения за отклонением объекта в двух взаимно перпендикулярных направлениях при развертке изображения только в одном, например горизонтальном, направлении, диафрагма выполнена в форме прямоугольного треугольника, катеты которого ориентированы по направлениям координатных осей, блок слежения по оси X построен на основе фазового дискриминатора, сравнивающего сигналы, соответствующие переднему фронту рабочего импульса на выходе диссектора, и опорные импульсы - синхроимпульсы, подаваемые в генератор развертки и задержанные для подачи на фазовый дискриминатор по времени па половину периода развертки, а блок слежения по оси У также выполнен на основе фазового дискриминатора, сравнивающего сигналы, соответствующие переднему фронту рабочего импульса, задержанные на время, равное длительности рабочего импульса при нулевом отклонении по оси У, и сигналы, соответствующие заднему фронту рабочего импульса. 2.Фотоэлектронное следящее устройство по п. 1, отличающееся тем, что, с целью перехода от режима поиска в режим слежения, блоки, вырабатывающие сигнал, соответствующий заднему фронту рабочего импульса, сигнал, соответствующий задержанному переднему фронту рабочего импульса, и опорный сигнал включены в схему «И, управляющую коммутирующим приспособлением. 3.Фотоэлектронное следящее устройство по пп. 1 и 2, отличающееся тем, что, с целью возвращения в режим поиска, блок формирования синхроимпульсов и выход диссектора подключены к коммутирующему приспособлению через декадный счетчик. 4.Фотоэлектронное следящее устройство по пп. 1-3, отличающееся тем, что, с целью повыщения точности работы устройства при переходе к режиму слежения, на входе вентиля, подсоединяющего генератор развертки к отклоняющей системе диссектора, включен аттенюатор, уменьшающий амплит ду пилообразного напряжения, питающего отклоняющую систему, причем включение вентиля через аттенюатор осуществляется коммутирующим приспособлением.
Фиг.}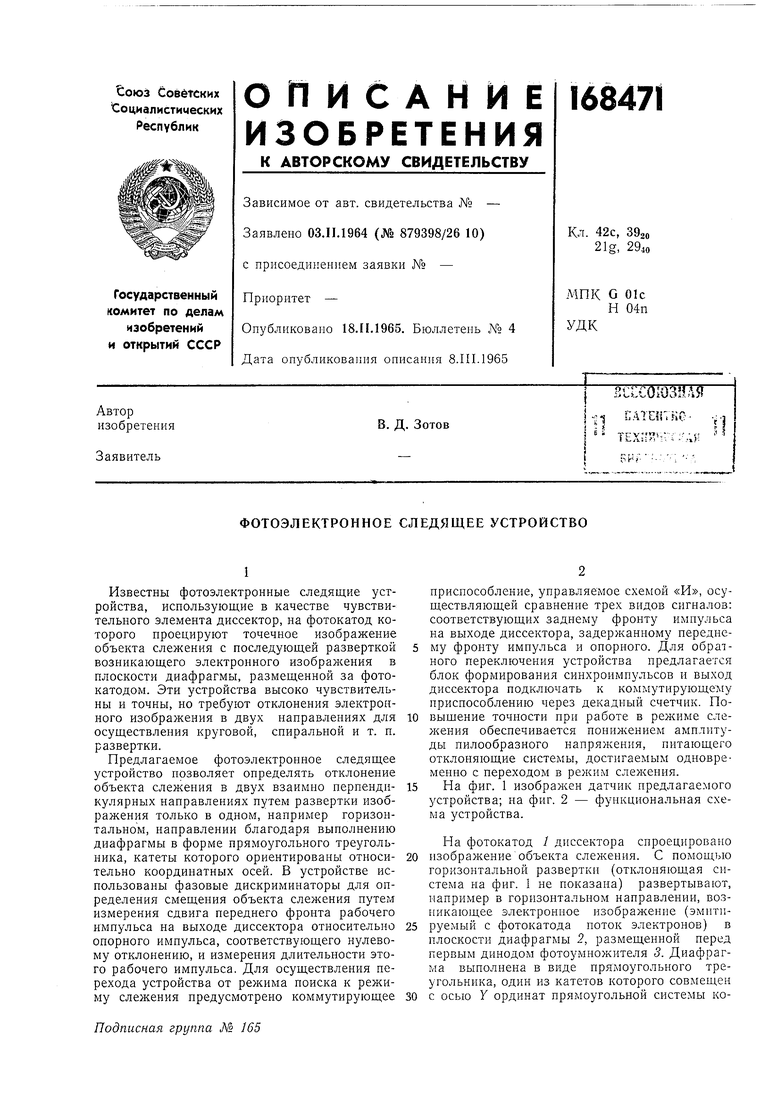
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОФОТОННЫЙ ПРИЕМНИК ДЛЯ ПРОСТРАНСТВЕННО-ВРЕМЕННОГО ПОИСКА ОПТИЧЕСКИХ ИМПУЛЬСНЫХ СИГНАЛОВ | 2014 |
|
RU2568939C2 |
| Н Е. Г. Сабинин-КоробочкинТомский институт радиоэлектроники и электронной техники | 1972 |
|
SU344383A1 |
| СПОСОБ РЕГИСТРАЦИИ СЛАБЫХ СВЕТОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2190196C1 |
| УСТРОЙСТВО ЛАЗЕРНОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 1996 |
|
RU2120648C1 |
| Способ определения слабого светового потока в пятне малых размеров | 1983 |
|
SU1145252A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ | 1971 |
|
SU299397A1 |
| УСТРОЙСТВО для ВВОДА ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1973 |
|
SU361465A1 |
| Фотоэлектронный измеритель смещений светового пятна | 1985 |
|
SU1357711A1 |
| Измеритель малых расстояний | 1978 |
|
SU823860A1 |
| ДАТЧИК ФОТОЭЛЕКТРОННОГО СКАНИРУЮЩЕГО УСТРОЙСТВА | 1964 |
|
SU164338A1 |