Изобретение относится к области электрических машин особых типов и может быть использовано при создании средств автоматики и в приборостроении.
Электродвигатель может быть выполнен в двух вариантах. Первому варианту соответствует фиг. 1, 2, 3, второму - фиг. 4, 5, 6.
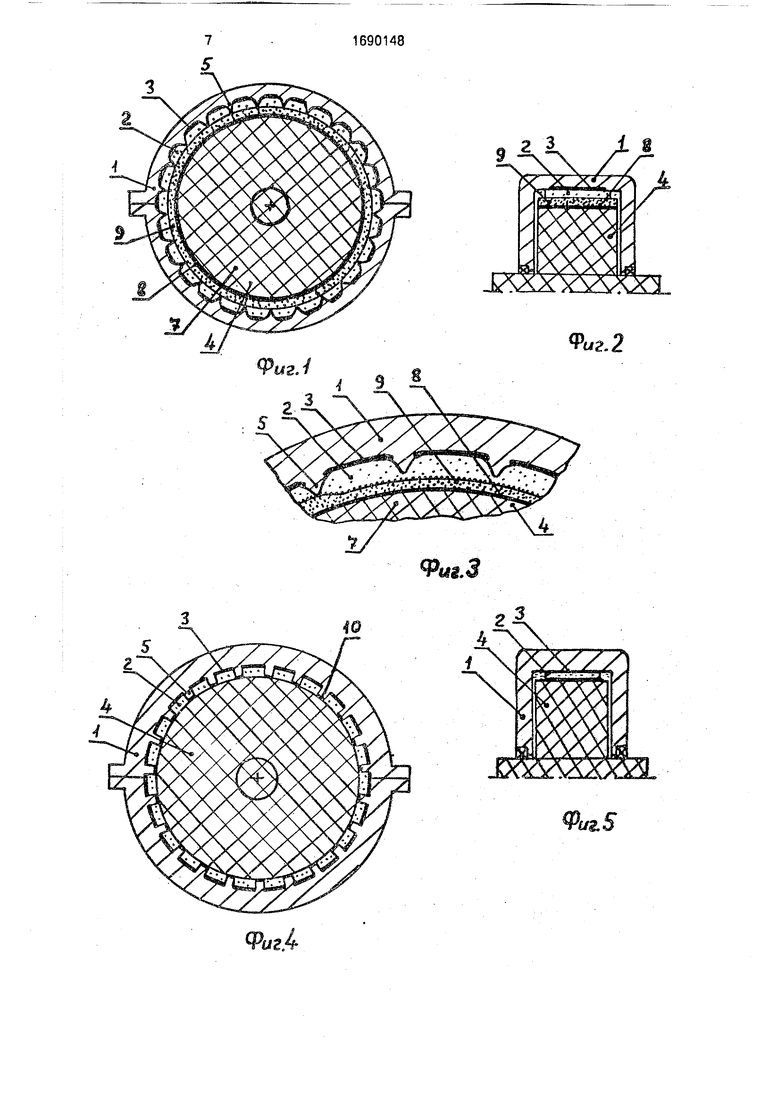
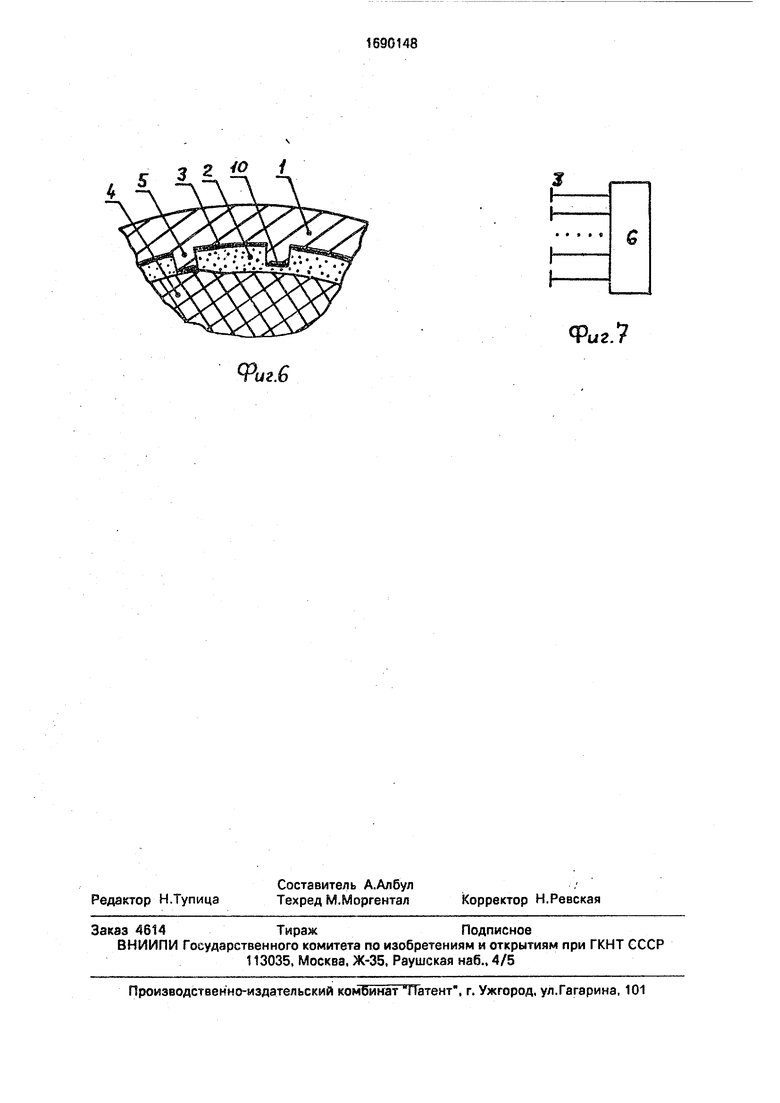
На фиг. 1 показан первый вариант электродвигателя (в поперечном разрезе); на фиг. 2 дан продольный разрез первого варианта электродвигателя; на фиг. 3 дан местный разрез (фрагмент) первого варианта электродвигателя (при запитанных электродах); на фиг, 4 показан второй вариант электродвигателя (в поперечном разрезе); на фиг. 5 дан продольный разрез второго варианта электродвигателя; на фиг. 6 дан мест- ный разрез второго варианта электродвигателя (при запитанных электродах); на фиг. 7 дана схема электропитания электродов двигателя.
По всем вариантам (фиг, 1-7) электродвигатель содержит диэлектрический стаOs Ю О
Ј
00
тор 1 и электрореологическую жидкость 2. На статоре 1 установлены проводниковые электроды 3, между которыми имеются выступы 5, В состав двигателя входит ротор 4, установленный на валу двигателя. В пространство ограниченное выступами статора и ротором 4, помещена электрораологическая жидкость (или элект- рореологическая жидкая смесь). Электрореологическая жидкость 2 (или электрореологическая суспензия) помещена в пространство, ограниченное выгтупа- ми статора и ротором 4 (фиг. 2, 5).
Особенностью двигателя является то, что ротор 4 двигателя выполняется с гибкой поверхностью, причем поверхность ротора 4 при отсутствии питания электродвигателя упирается в выступы 5 статора 1. Длина внешней окружности гибкого ротора 4 может быть не меньше длины окружности, соответствующей выступам 5 статора 1, Электроды 3 статора подключаются к фа- зовращающемуся устройству 6 (фиг. 7). Гибкий ротгр 4 может быть и эллиптическим,
В кг естве фазовращающего устройства 6 можно использовать распределители или генераторы многофазного напряжения. Можно испопьзовать и обычную многофазную сеть,
По гервому варианту (фиг, 1, 2, 3) ротор 4, выполняется в виде твердой цилиндрической диэлектричесчой основы 7, на поверхность которой нанесен слой 8 проводника, и на эту твердую основу 7 со слоем 8 проводника надета гибкая оболочка 9 из диэлектрика (полимера или резины). Таким образом, ротор 4 Б варианте по фиг. 1-3 получается как комбинация из твердой сердцевины со слоем 8 проводника и гибкой оболочки 9.
По второму варианту (фиг. 4, 5, 6) ротор 4 целиком может быть выполнен из гибкого диэлектрика (например, а виде полимерного или резинового цилиндра на валу). При этом на статоре 1 устанавливаются дополнительные электроды 10, которые располагаются на выступах 5, Электроды 10 (как и электроды 3) могут быть подключены к фа- зовращающемуся устройству б (или распре- делителю). Гибкий ротор 4 можно выполнять и из проводящей резины или полимера.
Таким образом, вариант по фиг. 1-3 имеет более простой статор 1, но более сложный ротор 4, а вариант по фиг. 4-6, наоборот, имеет более простой ротор 4, но более сложным статор 1.
Благодаря ограниченному применению металлов, которые идут только на изготовление электродов 3 или 10 и гонкого покрытия-слоя 8, и использованию легких материалов-диэлектриков (пластмасс и полимеров скоб предлагаемый электродвигатель получается весьма легким и технологичным. Отеутствие массивных деталей снижает и габариты двигателя.
При сборке двигателя (фиг. 1, 4) гибкий рогор 4 сначала вкладывается в одну (полуокружную) половину статора 1, а затем, за0 крывается второй полуокружной половиной статора 1, которую скрепляют с первой половиной. Так обеспечивается посадка с натягом гибкого ротора 4 в круглой расточке статора 1.
5 Электродвигатель работает следующим образом.
При отсутствии питания электродов гибкий ротор 4, сцепляясь с выступами 5 (фиг. 1, 4), надежно фиксируется в неподвижном
0 положении
При подаче питания на электроды 3 (фиг. 1, 3) последние создают электрическое поле. При этом, вследствие того, что электроды 3 подключены к фазовращающемуся
5 устройству 6 (или распределителю), электрическое поле статора (фиг. 1, 3) носит характер бегущего (вращающегося) поля. С помощью фазовращающего устройства 8 (или распределителя, фиг. 7) можно пооче0 редно запитывать все электроды 3 (по два и более сразу), фиг. 1, 3. При этом между одним из электродов 3 (фиг. 1, 3) и слоем 8 проводника ротора 4 возникает электрическое поле, рзвно как между соседним элек5 тродом 3 и слоем 8 проводника ротора 4. (т.е. например, один электрод 3 подключается к плюсу фазовращающего устройства 6, а соседний с ним электрод 3 одновременно подключается к минусу фазовращающего
0 устройства 6). Аналогично, можно подключать и по четыре, шесть, восемь и т.д. электродов 3 к выходу устройства 6. Вследствие возникновения электрического поля между определенными электродами 3 и кольцевым
5 слоем 8 проводника ротора 4 (фиг. 3), электрореологическая жидкость, находящаяся в электрическом поле, начинает вспухать или увеличиваться а объеме (Динамика процессов переноса в реологически сложных сре0 дах, ред, Шульмана З.П., Минск, 1978, стр. 158-161). Данное вспухание электрореологической жидкости под запитанными электродами 3 (фиг. 3) приводит к ее давлению на гибкую оболочку 9 ротора. Оболочка 9 не5 много прогибается (фиг. 3) и отходит от выступов 5. Вследствие того, что электроды 3 по окружности статора 1 (фиг. 1, 3) запиты- ВЗЮТСР поочередно, и, соответственно, вспухание злектрореологической жидкости в промежутках между выступами тоже происходит поочередно (в соответствии с коммутацией распределителя-устройства 6, фиг. 7) между гибким ротором 4 и статором 1 (фиг, 1,3) возникают бегущие волны сцеплений. Начинает действовать волновое сцепление (перистальтика). Гибкий ротор 4 начинает медленно проворачиваться. Вследствие волнового сцепления гибкого ротора 4 с выступами 5 статора и движущимися пучностями электрореологической жидкости (фиг. 1, 3). скорость вращения ротора получается малой, а момент, соответственно весьма большим. Изменяя частоту коммутации распределителя-устройства 6, можно менять и скорость медленного вращения.
Вариант по фиг. 4-6 работает во многом аналогично варианту по фиг. 1-3. Здесь (фиг. 4-6) поочередное запитывание электродов 3 и 10 такжо создает бегущие волны вспухания жидкости, волны вспухающей жидкости, деформируя гибкий ротор 4, создают в нем бегущие деформации, вращающие ротор 4. При запитывании электродов целесообразно электроды 3 подключать к одной полярности напряжения, а электроды 10 - к другой полярности напряжения. С помощью волнового взаимодействия ротора 4 с выступами 5 и пучностями электрореологической жидкости ротор 4 проворачивается в нужную сторону.
При отключении питания ротор 4, сцепляясь с выступами 5 (фиг. 4). надежно фиксируется в неподвижном положении.
К сказанному можно добавить, что электродвигатель (фиг. 4-6) может работать и без электродов 10, т.е. если выступы 5 будут чисто диэлектрическими. В этом случае
«опухание электрореологической жидкости будэт обеспечиваться одними электродами 3. Наличие электродов 10 улучшают работу двигателя (фиг. 4-6), обеспечивая более совершенную геометрию для процессов волнообразования.
Формула изобретения
1. Электродвигатель, содержащий ротор и диэлектрический статор, на котором установлены секторные проводниковые электроды, разделенные диэлектрическими промежутками, и электрореологическую
жидкость в рабочем зазоре, отличающийся тем, что, с целью повышения вращающегося момента, устойчивости вращения на малых оборотах, надежности регулировки частоты вращения и обеспечения надежной
фиксации ротора, ротор выполнен с гибкой поверхностью, между электродами статора имеются выступы, в которые упирается поверхность ротора, при этом электрореологическая жидкость помещена в пространство
между выступами, а электроды статора подключены к фазовращающему устройству.
2.Электродвигатель по п. 1,отличающий с я тем, что ротор выполнен на твердой основе с кольцевым проводником на ее
поверхности, при этом на твердую основу с проводником надета гибкая оболочка из диэлектрика.
3.Электродвигатель по п. 1, от л и ч а ю- щ и и с я тем, что ротор целиком выполнен
из гибкого диэлектрика.
4.Электродвигатель по пп. 1 и 3, о т л и- чающийся тем, что на выступах между электродами статора установлены дополнительные электроды.
1690148
«лч/.
Г
Риг.2

| название | год | авторы | номер документа |
|---|---|---|---|
| Электродвигатель | 1989 |
|
SU1681369A1 |
| Электрическое двигательное устройство | 1989 |
|
SU1697235A1 |
| Слоистый материал с управляемой жесткостью | 1990 |
|
SU1782774A1 |
| Пресс непрерывного действия (его варианты) | 1981 |
|
SU1017508A1 |
| ЕМКОСТНЫЙ ДВИГАТЕЛЬ-ПЕРЕМЕШИВАТЕЛЬ | 2010 |
|
RU2453978C2 |
| Диэлектрический двигатель | 1979 |
|
SU873363A1 |
| СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ И ЭЛЕКТРОСТАТИЧЕСКИЙ ДЕМПФЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2656232C1 |
| Передача | 1989 |
|
SU1753107A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОЙ ОБРАБОТКИ ЖИДКОСТИ | 2005 |
|
RU2284302C1 |
| Лопастной гидродвигатель | 1985 |
|
SU1551845A1 |
Изобретение относится к электродвигателям специальных типов. Электродвигатель содержит установленный на валу ротор, а также диэлектрический статор, на котором и установлены секторные электроды из проводников, разделенные диэлектрическими промежутками с выступами, при этом в пространство между ротором-и выступами статора помещена электрореологическая жидкость. Ротор электродвигателя выполнен с гибкой поверхностью, причем поверхность ротора в исходном состоянии упирается в выступы статора, длина внешней окружности ротора не меньше длины окружности, соответствующей выступам статора, а электроды статора подключены к фазовращающему устройству. Электродвигатель может быть выполнен в двух вариантах. По первому варианту ротор может быть выполнен на твердой основе с проводником на ее поверхности, при этом на твердую основу с проводником надета гибкая оболочка из диэлектрика. По второму варианту гибкий ротор может быть целиком выполнен из гибкого диэлектрика, а на выступах статора установлены дополнительные электроды. Устройство обеспечивает устойчивую работу на малых оборотах, высокий момент, надежную регулировку скорости вращения, надежную фиксацию ротора в исходном и конечном положениях и может быть использовано в производстве средств автоматики и в приборостроении. 3 з.п. ф-лы, 7 ил. If
Фиг.6
Фиг.
| Волновой электродвигатель | 1983 |
|
SU1104620A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Диэлектрический двигатель | 1982 |
|
SU1054861A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
