(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель давления | 1989 |
|
SU1631326A1 |
| Двухкоординатный наклономер | 1979 |
|
SU838339A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| Измеритель линейных перемещений | 1985 |
|
SU1262270A1 |
| Преобразователь угла наклона в напряжение | 1989 |
|
SU1640528A1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| Преобразователь перемещений в период колебаний | 1984 |
|
SU1260665A1 |
| Измеритель линейных перемещений | 1987 |
|
SU1439382A1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения углов наклона объекта одновременно по двум направлениям. Цель изобретения - повышение точности. Подвижный электрод 4 закреплен на нижнем конце маятника 2. а неподвижный электрод 5 изолировано закреплен на корпусе 1. Электроды выполнены Г-образными и расположены симметрично относительно вертикальной оси. Концы электродов перекрещиваются так. что их проекция на горизонтальную пло-. скость образует прямоугольник. Выполнение одного из электродов резистивным и подключение его концов через переключатель к источнику питания переменного напряжения, а также выполнение поверхностей электродов сферическими с центром в точке подвеса маятника и расположение их с зазором друг от друга позволяет повысить точность за счет исключения механического контакта между электродами. 3 ил.
Изобретение относится к измерительной технике и может быть использовано для измерения углов наклона объекта, отклонения от горизонтальности одновременно по двум координатам.
Цель изобретения - повышение точности.
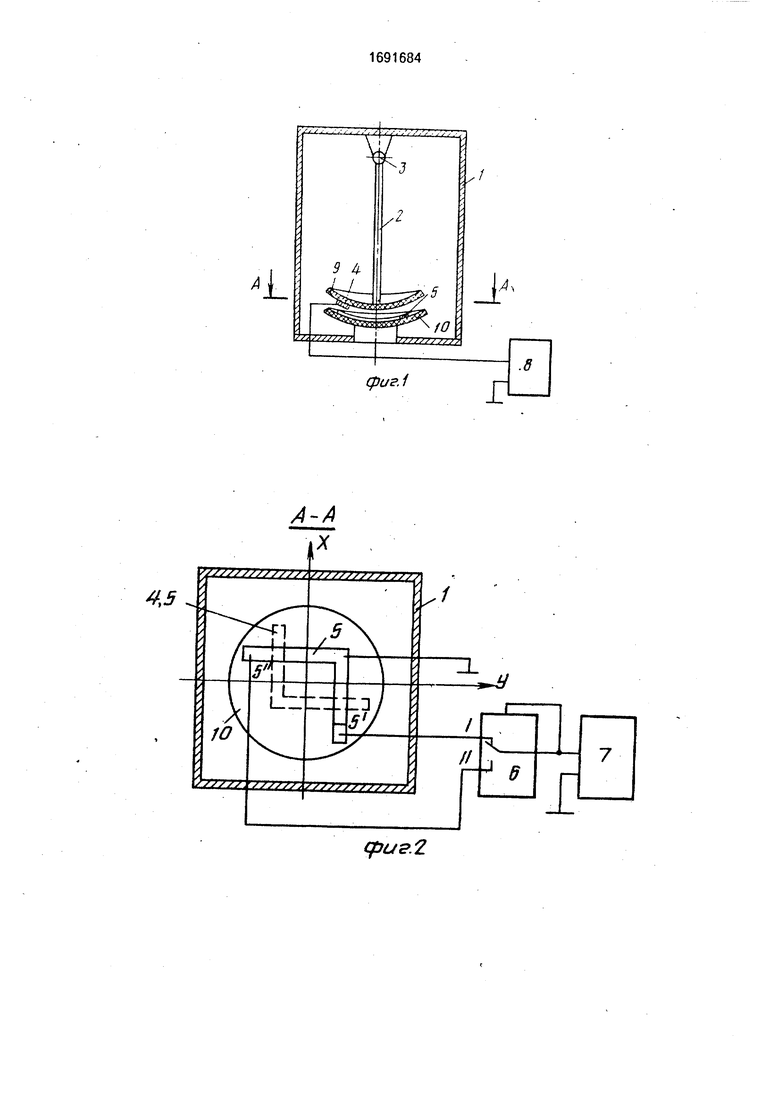
На фиг.1 показана конструкция датчика и вторичного преобразователя к нему; на фиг,2 - разрез А-А на фиг. 1; на фиг.З - схема замещения.
Двухкоординатный преобразователь угла наклона содержит корпус 1, маятник 2, подвешенный на шаровой опоре 3 (крестовине), подвижный проводящий электрод 4, укрепленный на маятнике, неподвижный электрод 5, имеющий равномерное рези- стивное сопротивление, переключатель 6, источник переменного напряжения 7, измерительная схема 8 (на фиг.1 показан вариант закрепления электродоь с помощью изолирующих сферических оснований 9 и 10).
Электроды 4 и 5 выполнены Г-образными и расположены симметрично относительно вертикальной оси корпуса. Концы электродов перекрываются так, что их проекция на горизонтальную плоскость образует прямоугольник.
Преобразователь работает следующим образом.
Переключатель срабатывает в зависимости от полярности напряжения источника питания на его управляющем входе. Если переключатель находится в положении 1 сигнал с источника питания поступает на вывод S неподвижного электрода 5 и протекает по соответствующей его половине, ориентированной вдоль координаты X на землю. При этом (см. схему замещения датО Ч
00
Јь
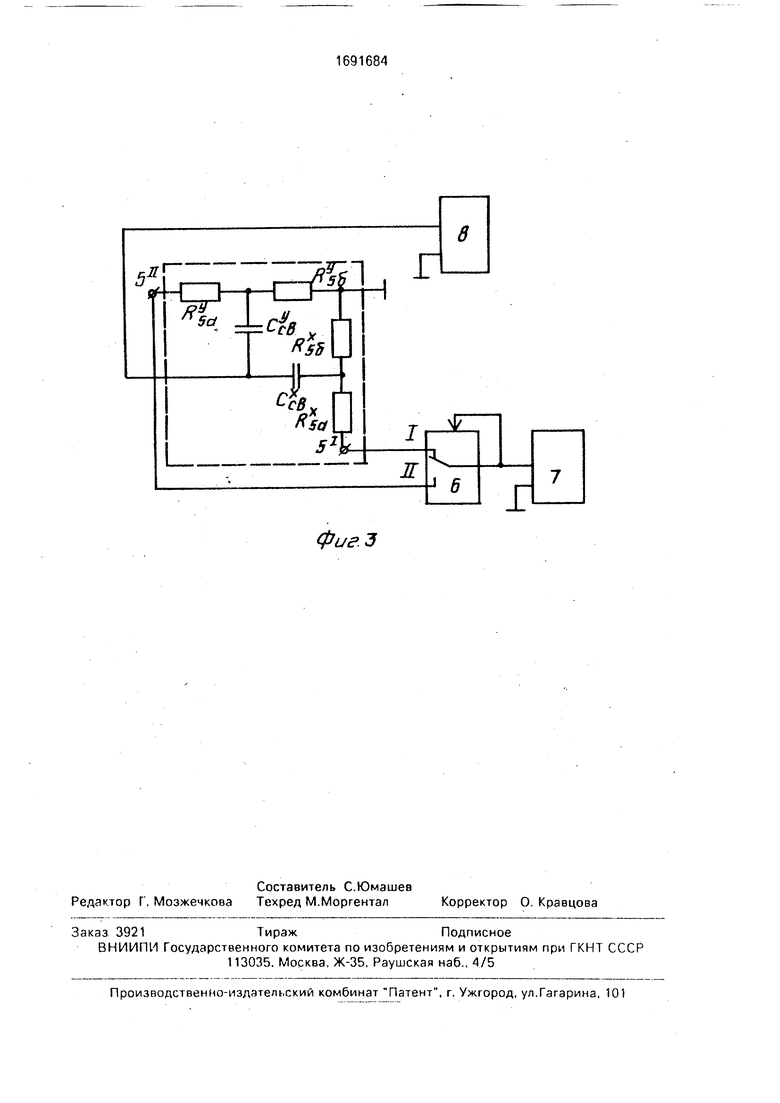
чика на фиг.З) на неподвижном электроде маятника через емкость Схсв в зазоре между обоими электродами наводится напряжение, определяемое коэффициентом деления делителя, образованного сопротивлениями Rx5a и RX56 электрода 5 по обе стороны от подвижного электрода (по обе стороны от электрического центра приложения емкости Схсв). Это напряжение подается в изме- рительную схему 8, т.е. (см. схему замещения на фиг.З).
R§6.. R5i2±ARx
-II RSl2 - Uo
R
R§a + R§ffno
где U0 амплитуда напряжения с выхода источника питания;
RX012 - сопротивление участка электрода 5 от вывода 5 до электрического центра приложения емкости Схсв при угле наклона
равном нулю, AR8 «рад I /Э, Орад- угол наклона по координате X; I - длина маятника; ДОм/м - погонное сопротивление электродов 5,RX0 Rx5a + RX56.
При другой полярности напряжения источника питания 7 переключатель 6 перебрасывается в положение II и подключает к нему вывод 5м электрода 5, ориентированного вдоль координаты Y. При этом в измерительную схему 8 поступает напряжение через емкость Сусв. равное
п -и R6i2±ARy RX
где ARV с$ад I /э. - угол наклона по координате Y.
Очевидно, что для снижения влияния емкости связи Схсв и Сусп необходимо, чтобы входное сопротивление RBx измерительной схемы 8 удовлетворяло условию:
« RBX 1
JwClx
Таким образом, при одной полярности сигнала напряжение измерительной схемы пропорционально углу наклона по одной координате, а при другой полярности - напряжение измерительной схемы пропорционально углу наклона по второй координате.
В предлагаемом устройстве устранены недостатки, снижающие точность измерения .угла наклона (включая температурные воздействия зэ счет неправильного выбора материалов корпуса и маятника с одинаковым ТК). Кроме того, конструкция датчика и электронного блока сравнительно проста,
та.к как включают в себя резистивный элемент, который может быть легко изготовлен (напылением, травлением, наклейкой фольгового резистора, даже намоткой на каркас
и т.п.), а также такие широко применяемые элементы как переключатель, источник питания (по сути - автогенератор) и простейшего вида измерительную схему (например, два измерителя мгновенного значения, два
0 детектора с фильтром низких частот и т.п.). Высокая надежность обеспечивается тем, что поверхностная коррозия электродов и т.п. не влияет на результат преобразования, Кроме того, вибрация вдоль оси маятника
5 (перпендикулярна плоскости измерения) вызывает изменение емкости связи, но не влияет на результат преобразования.
Вместе с тем с целью защиты электродов от действия агрессивных сред электро0 ды могут быть покрыты агрессивностойкими материалами (лаками, красками, полимерными покрытиями и др). При этом существенно повышается надежность без ухудшения метрологических характеристик.
5 Дополнительными достоинствами является применимость датчиковой части преобразователя во взрывоопасных помещениях, так как здесь исключено ис- крообразование,
0 Кроме того, электроды 4 и 5 (при сохранении их соответствующих связей) могут поменяться местами. При этом результат преобразования остается тот же. Формула изобретения
5 Двухкоординатный преобразователь угла наклона, содержащий подвижный электрод, выполненный с возможностью поворота относительно точки, лежащей на вертикальной оси. корпуса, неподвижный
0 электрод, закрепленный изолированно на , L. корпусе, источник питания и измерительную схему, подключенную к одному из электродов, отличающийся тем, что, с целью повышения точности, подвижный электрод
5 закреплен на нижнем конце введенного маятника, электроды выполнены Г-образными и расположены с возможностью перекрещивания их концов, симметрично относительно вертикальной оси корпуса, причем
0 поверхности электродов расположены с зазором друг от друга и выполнены сферическими с центрами кривизны, совпадающими с точкой подвеса маятника, при этом средняя точка второго из электродов зазем5 лена, а концы подключены к выводам введенного переключателя, управляющий и сигнальный входы которого подключены к выходу источника питания переменного тока.
фие.З
| Двухкоординатный резистивный преобразователь угла наклона | 1977 |
|
SU708149A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
