СО
с

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1982 |
|
SU1080163A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1993 |
|
RU2069012C1 |
| Устройство для считывания графической информации | 1987 |
|
SU1681316A1 |
| Способ считывания графическойиНфОРМАции и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU802978A1 |
| Планшет для устройства считывания графической информации | 1990 |
|
SU1774356A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1451742A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1043692A1 |
| Способ считывания графической информации и устройство для его осуществления | 1980 |
|
SU982037A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1018136A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1112382A2 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для автоматизированного ввода, в ЭВМ графической информации. Цель изобретения - повышение точности считывания координат. В планшете для устройства считывания графической информации, содержащем группы основных и дополнительных координатных шин, в каждой из которых координатные шины расположены параллельно и включены последовательно, координатные шины основных и дополнительных групп выполнены с равными периодами d укладки и расположены в плоскости планшета под острыми углами а и -«относительно координатных осей, равными по модулю и противоположными по знаку и заключающимися в пределах а 0 arcsin«/ /2 Амэкс, где Амакс максимальная измеряемая координата на планшете. 3 ил.
Изобретение относится к автоматике и вычислительной технике и может быть использовано для автоматизированного ввода в ЭВМ графической информации.
Цель изобретения - повышение точности считывания координат.
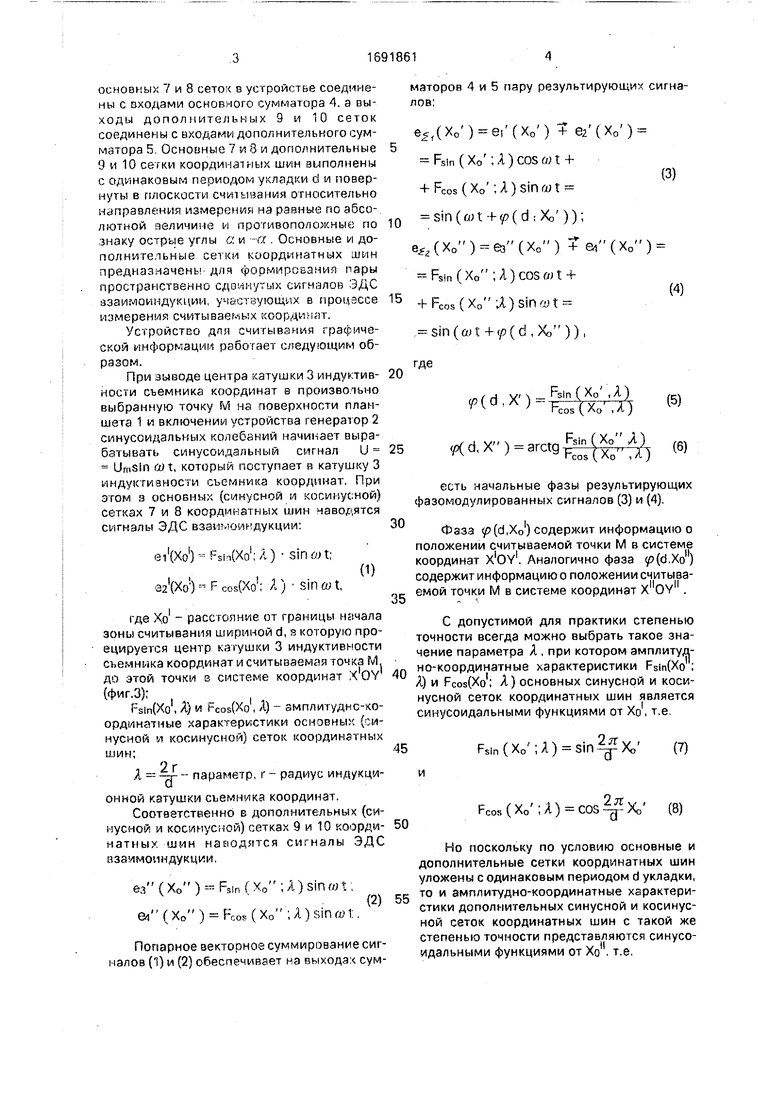
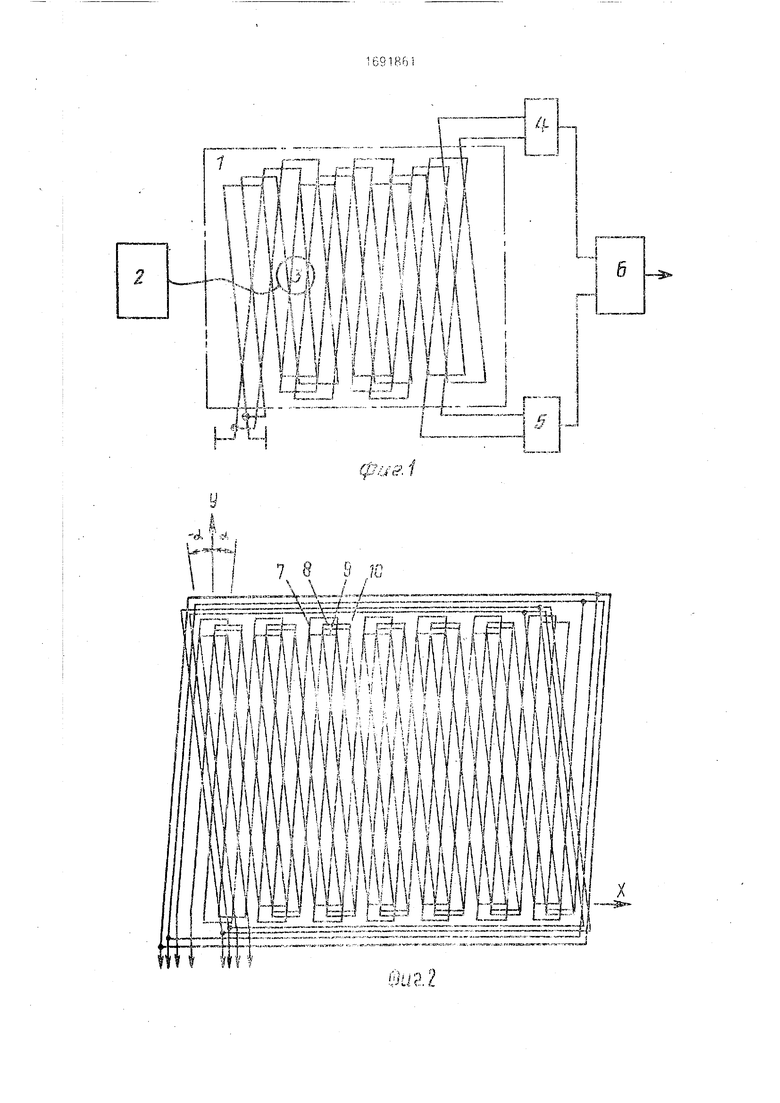
На фиг.1 показана блок-схема устройства для считывания графической информации, в котором используется планшет (для одного направления измерения); на фиг.2 - принципиальная схема координатного матричного планшета (для одного направления); на фиг.З - положение считываемой точки М в основной (XYZ) и в повернутых относительно нее на углы а. и -а системах координат (Х ОУ1 и ).
В состав устройства (фиг. 1) входят координатный матричный планшет 1 с группами основных и дополнительных сеток из параллельных последовательно соединенных координатных шин каждая, генератор 2 синусоидальных колебаний, Е входом подключенный к катушке 3 индуктивности съемника координат, индуктивно связанной с сетками планшета, основной 4 и дополнительный 5 сумматоры, входами подключенные соответственно к выходам основных и дополнительных сеток координатных шин, а выходами связанные с входами анализатора б разности фаз, выход которого является выходом устройства.
Координатный матричный планшет (фиг.2) содержит основные 7 и 8 и дополнительные 9 и 10 сетки из параллельных последовательно соединенных шин каждая (на фиг.2 показаны основные и дополнительные сетки координатных шин только для одного направления измерения, например OY; для направления измерения ОХ сетки выполнены аналогичным образом) Выходы
О
ч
д
00
О
основных 7 и 8 сеток в устройстве соединены с входами основного сумматора А. а выходы дополнительных 9 и 10 сеток соединены с входами дополнительного сумматора 5. Основные 7 и 8 и дополнительные 9 и 10 сетки координатных шин выполнены с одинаковым периодом укладки d и повернуты в плоскости считывания относительно направления измерения на равные по абсолютной величине и противоположные по знаку острые углы а и -а . Основные и дополнительные сетки координатных шин предназначены для формирования пары пространственно сдвинутых сигналов ЭДС взаимоиндукции, участвующих в процессе измерения считываемых координат,
Устройство дпп считывания графической информации работает следующим образом.
При выводе центра катушки 3 индуктивности съемника координат в произвольно выбранную точку М на поверхности планшета 1 и включении устройства генератор 2 синусоидальных колебаний начинает вырабатывать синусоидальный сигнал U - UmSln 0)1, который поступает в катушку 3 индуктивности съемника координат. При этом в основных (синусной и косинусной) сетках 7 и 8 координатных шин наводятся сигналы ЭДС взаимоиндукции:
ei (Xo )-FSin(Xo ;A) -siriuH; ez fXo1) F cos( А) sinoH,
где Хо - расстояние от границы начала зоны считывания шириной d, в которую проецируется центр катушки 3 индуктивности съемника координат и считываемая точка М. до этой точки з системе координат x OY (Фиг.3);
FSin(Xo , А) и FCos(Xo, А) - амплитудно-координатные характеристики основных (синусной и косинусной) сеток координатных шин;
А
2г
-г- - параметр, г - радиус индукционной катушки съемника координат.
Соответственно в дополнительных (синусной и косинусной) сетках 9 и 10 координатных шин наводятся сигналы ЭДС взаимоиндукции.
ез (Х0 ) Fsin (Хо ; А) sinewt;
&j(Xo) Fcos()sinftH.
Попарное векторное суммирование сигналов (1) и (2) обеспечивает на выходах сумматоров 4 и 5 пару результирующих сигналов:
еЈ,(Х0 )е,(Хо ) Т ez (Xo )
Fsin (Хо ; А) cos w t + + Fcos(X0 ;A) sin(wt + p(d;Xo ));
(Хо) ез (Хо ) + ей (Х0) - (Xo ; A) cos он + +Fcos()sinftH , sin(wt (d ,Xo)), где
(3)
(4)
(п( d Cx° .,) у и , л ) -г у у -тл
гcos I Ло 1 Л ,
(5)
25y(d.X) arctg-fs n 0 U (6)
г cos Ло | Л )
30
есть начальные фазы результирующих фазомодулированных сигналов (3) и (4).
Фаза р(d,X0) содержит информацию о положении считываемой точки М в системе координат x OY1, Аналогично фаза (d,Xo) содержит информацию о положении считыва- „(. емой точки М в системе координат .
С допустимой для практики степенью точности всегда можно выбрать такое значение параметра А, при котором амплитуд- «Q но-координатные характеристики FSin(Xo , А) и Fcos(Xo; А) основных синусной и косинусной сеток координатных шин является синусоидальными функциями от Хо1, т.е.
45Fsin(Xo ;A) (7)
и
1л
50
Fcos(x0 ; A) (8)
Но поскольку по условию основные и дополнительные сетки координатных шин уложены с одинаковым периодом d укладки, ее то и амплитудно-координатные характеристики дополнительных синусной и косинусной сеток координатных шин с такой же степенью точности представляются синусоидальными функциями от Хо, т.е.
Fsin (X0 ;;. ) (9)
FcOS() (10)
Тогда с учетом (7) -(10) вместо (5) и (6) имеем10
n
р (d, Х„ ) srctg- X- 4 X;
;пл7Г у
2л.
Х° )9--2Ьт7 1тХо (12) IT °
т.е. (d, Хо ) и р (d,Xo) - строго линейные функции от Хо и Хо соответственно.
Покажем, что разность фаз $d,Xo ) и (d, Хо ), определяемых соотношениями (11) и (12), т.е.
V(d,Y0 )p(d,x0)- -p(d,Xo)p(Xy-xy ).
(13)
строго пропорциональна в этом случае значению абсолютной координаты Yo считываемой точки М в системе координат XOY (фиг.З). Для этого воспользуемся формула- ми преобразования координат.
Имеем
Хо - Xocos a + Yosin a ,
(14)
Хо - Xocos а -Yosin a(15)
С учетом (14) и (15) из (13) получаем
50(d,Yo)(X0cosa + + Yo sin a-XoCos a + Y 0 sin a) (16) -Yosina.
Измерение разности фаз двух сигналов в пределах периода аппаратурно производится однозначно, поэтому для реализации §§
)
0)
(6) 10
Ц)
)
6)
15
20
12)
й
и 11) 25
30
ае иYа- 35
40
45
50
ов оии §§
абсолютного отсчета считываемой координаты YO необходимо, чтобы разность фаз (16) между результирующими сигналами (3) и (4) изменялась в пределах поля считывания планшета 1 на величину 2 л по направлению измерения координаты Yo. т.е. О (5y(d,Yo)2jr
Действительно, если принять в (16)текущую координату Y - YO 0, что соответствует началу координат, получим 5y(d,Yo) 0.
Если Y Yo YoManc тр-у а что соответ ствует максимальной измеряемой координате Yo, тогда д (f (d.Yo) -2л
Результирующие сигналы (3) и (4) с выходов основного 4 и дополнительного 5 сумматоров поступают на входы анализатора 6 разности фаз. На выходе анализатора 6 разности фаз присутствует разностный сигнал, определяемый выражением (16), со строго линейно изменяющейся фазой, пропорциональной абсолютной координате Y0 считываемой точки. Преобразование указанного сигнала с линейно изменяющейся фазой #(d,Yo) в коды считываемых координат (если это необходимо) может быть выполнено известными методами и средствами вычисли тельной техники.
Таким образом, предлагаемое устройство функционирует в соответствии с линейным законом изменения фазового рассогласования (16), что в принципе исключает неоднозначность считывания абсолют- ных координат, присущую известным устройствам нониусного типа, и таким образом обеспечивает достоверное считывание информации.
Формула изобретения
Планшет для устройства считывания графической информации, содержащий группы основных и дополнительных координатных шин, в каждой из которых координатные шины расположены параллельно и включены последовательно, отличаю - щ и и с я тем, что, с целью повышения точности считывания координат, координатные шины основных и дополнительных групп выполнены с равными периодами d укладки и расположены в плоскости планшета под острыми углами а и -а относительно координатных осей, равными по модулю и противоположными по знаку и заключающимися в пределах 0 a atcsin а /2АМакс, где Амакс максимальная измеряемая координата на планшете.
fx
cr/
CD
c J-
О
«иг. 3
| Патент США № 3735044, кл.,С 06 К 11/00, опублик | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Устройство для считывания графической информации | 1979 |
|
SU932516A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
