2. Устройство по п. 1, отличающееся тем, что блок формирования координат содержит триггер, два элемента И, последовательно соединенные первый счетчик, инвертор, регистр, сумматор, схему сравнения и элемент задержки, а также последовательно включенные второй счетчик, первый и второй коммутаторы, узел памяти и узел вывода координат, причем счетный вход триггера является одним из входов блока и соединен с первыми Входами элементов И и управляющим входом первого счетчика, разрядные входы которого являются другими входами блока, выходы первого счетчика соединены с одними из входов сумматора, первого коммутатора, с вторым и третьим входами элементов И, четвертые входь которых подключены к выходам триггера, другие входы которого соединены f выходом старшего paSряда первого счетчика, выходы элементов И соединены с вхбдами второго счетчика, выход элемента задержки подключен к управляющему входу регистра, выход схемы сравнения соединен с управляющим входом первого коммутатора, одни из выходов второго коммутатора подключены к соответствующим входам узла вывода координат,а управляющий вход второго коммутатора, соединенный с управляющим входом узла памяти, является управляющим входом блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1981 |
|
SU1013989A1 |
| Устройство для считывания графической информации | 1980 |
|
SU934515A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1993 |
|
RU2069012C1 |
| Устройство для считывания графической информации | 1987 |
|
SU1564661A1 |
| Устройство для считывания графической информации | 1986 |
|
SU1481813A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1531117A1 |
| Устройство для считывания графи-чЕСКОй иНфОРМАции | 1979 |
|
SU811304A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1089598A2 |
| Устройство для считывания графической информации | 1982 |
|
SU1043692A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1164754A1 |
1. УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ по авт. св. № 922817, отличающееся тем, что, с целью повышения надежности при считывании графической информации, оно содержит электропневмопреобразователь с трубопроводом, причем съемник координат содержит вакуумную камеру, соединенную с трубопроводом электропневмопреобразователя, управляющий вход которого, соединенный с управляющим входом блока формирования координат, подключен к шине управления устройства. СО с to со 00 to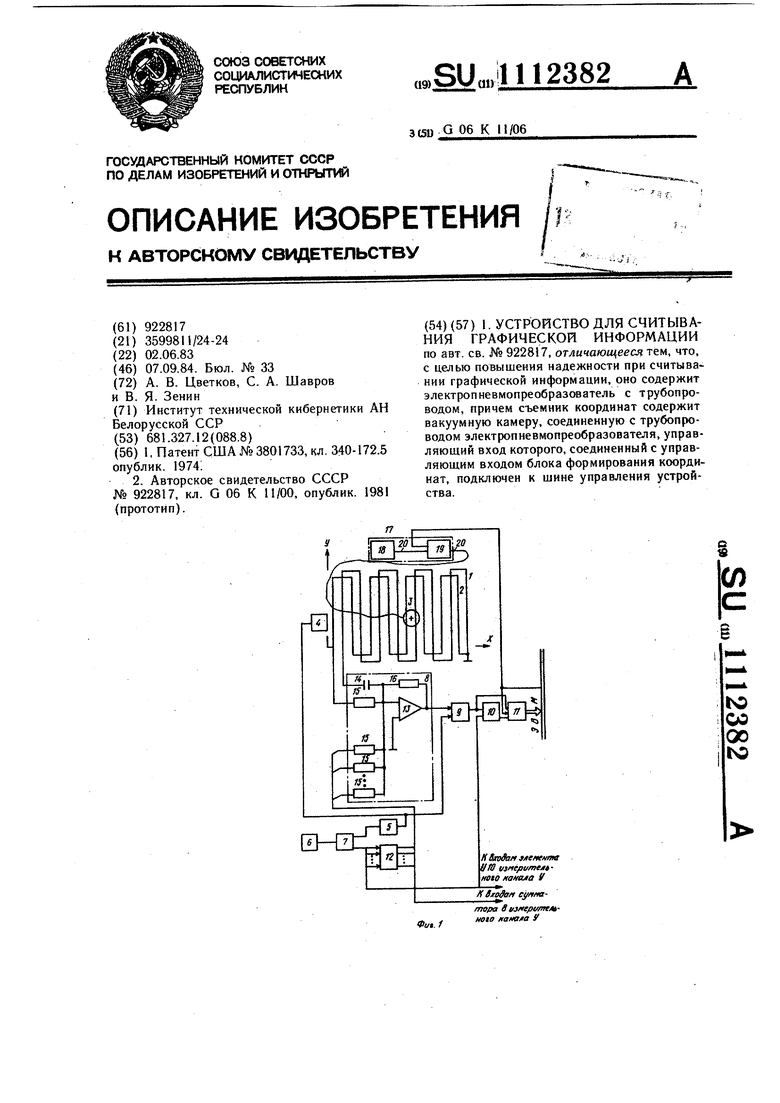
t
Изобретение относится к автоматике и вычислительной технике и может быть ис, пользовано при создании устройств для ввода графической информации в электронные
. вычислительные мащины.
Известно устройство для считывания графической информации, содержащее планшет с двумя ортогональными системами токопроводящих координатных щин, индуктивно связанных со съемником координат и подключенных к одним из входов сумматора, выход которого через фазовый компаратор соединен соответственно с одним из входов последовательно соединенных элемента И и блока формирования координат, последовательно соединенные генератор импульсов, делитель частоты, полосовой фильтр, подключенный к другому входу фазового компаратора и к усилителю, выход которого подключен к съемнику координат, разрядные выходы делителя частоты соединены с другими входами элемента И 1.
Однако это устройство не обеспечивает высокой точности считывания координат. Это обусловлено тем, что взаимодействие цилиндрической катушки съемника координат с парой сдвинутых на четверть периода укладки систем шин принципиально не обеспечивает сохранение синусоидального закона изменения наводимого на них сигнала. В результате сигнал рассогласования фаз опорного и ипдукцированного сигналов, преобразуемый в устройстве в код координат, является нелинейной функцией перемещения съемника координат относительно координатных шин.
По основному авт. св. № 922817 известно устройство, содержащее планщет с системами ортогональных токопроводящих координатных шин, индуктивно связанных со съем НИКОМ координат и подключенных к одним
Из входов двух сумматоров, каждый из которых выходом через фазовый компаратор соединен с одним из входов соответствующих последовательно соединенных элемента 5 И и блока формирования координат, последовательно соединенные генератор импульсов, делитель частоты, разрядными выходами соединенный с другими входами элементов И, и полосовой фильтр, подключенный к другим входам фазовых компараторов и усилителю, выход которого подключен к съемнику координат, и блок коррекции фа. зовых искажений, входы которого соединены с разрядными выходами делителя частоты, а выходы - с другими входами суммато5 ра 12.
Недостатком известного устройства является то, что при включении его в состав многопультовой системы, содержащей ЭВМ и ряд соединенных с ней по общему каналу устройств ввода-вывода, оно не обеспечивает
высокой надежности считывания графической информации, .поскольку его работа не координируется ЭВМ. В результате в момент съема координат графика канал связи с ЭВМ может быть занят другими устройства5 ми и считанная информация не попадет в ЭВМ т. е. :будет утрачена.
Цель изобретения - повышение надежности при считывании графической информации.
Поставленная цель достигается тем, что
устройство для считывания графической информации содержит электропневмопреобразователь с трубопроводом, причем съемник координат содержит вакуумную камеру, .соединенную с трубопроводом электропневмопреобразователя, управляющий вход которого, соединенный с управляющим входом блока формирования координат, подключен к шине управления устройства.
Кроме того, блок формирования коорди нат содержит триггер, два эшемента И, последовательно соединенные первый счетчик, инвертор, регистр, сумматор, схему сравнения и элемент задержки, а также последовательно включенные второй счетчик, первый и второй коммутаторы, узел памяти и узел вывода координат, причем счетный вход триггера является одним из входов блока и соединен с первыми входами элементов И и управляющим входом первого счетчика, разрядные входы которого являются другими входами блока, выходы первого счетчика соединены с одними из входов сумматора, первого коммутатора, с вторым и третьим входами элементов И, четвертые входы которых подключены к выходам триггера, другие входы которого соединены с выходом старшего разряда первого счетчика, выходы элементов И соединены с входами второго счетчика, выход элемента задержки подключен к управляющему входу регистра, выход схемы сравнения соединен с управляющим входом первого коммутатора, одни из выходов второго коммутатора подключены к соответствующим входам узла вывода координат а управляющий вход второго коммутатора, соединенный с управляющим входом узла памяти, является управляющим входом блока.
Предлагаемая конструкция устройства в случае занятости канала связи с ЭВМ обеспечивают автоматическую фиксацию съемника координат на поверхности -поля считывания, запоминание в схеме памяти кодов координат точек, считанных с момента определения занятости канала до момента полного останова - съемника координат на поверхности планшета, выдачу с большой скоростью кодов координат, хранящихся в схеме памяти, в ЭВМ, когда канал связи освобождается, и возврат устройства в обычный режим работы. Это значительно повыщает надежность при считывании информации.
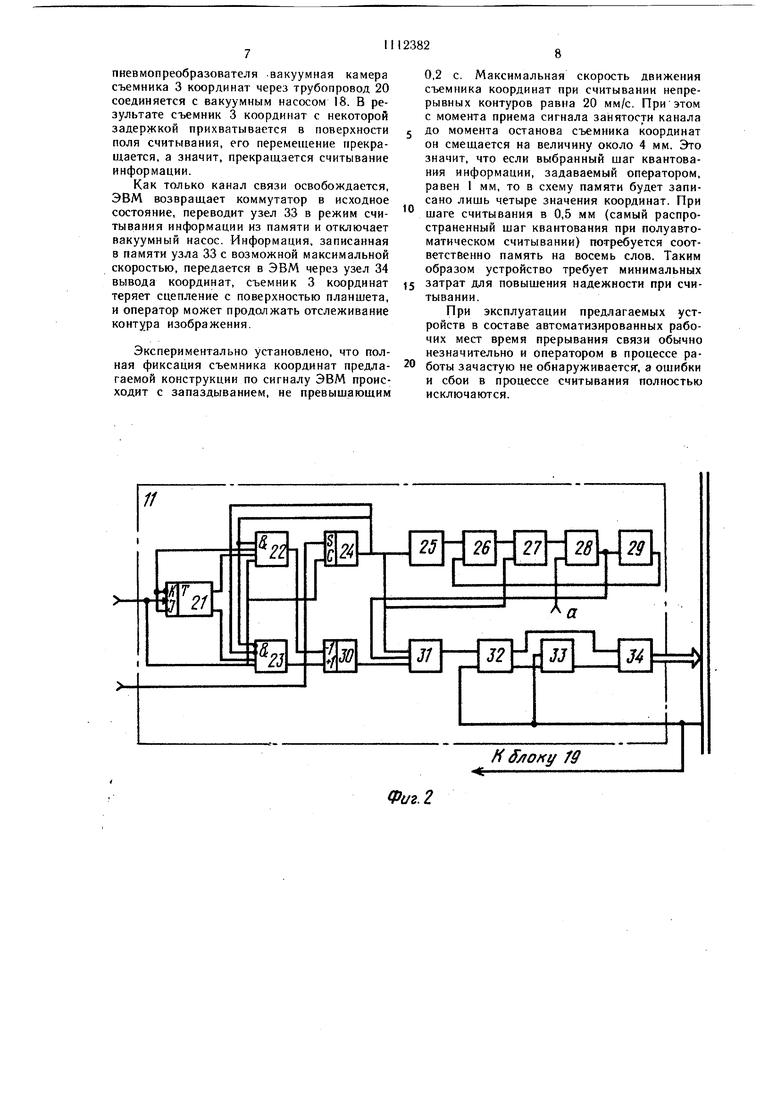
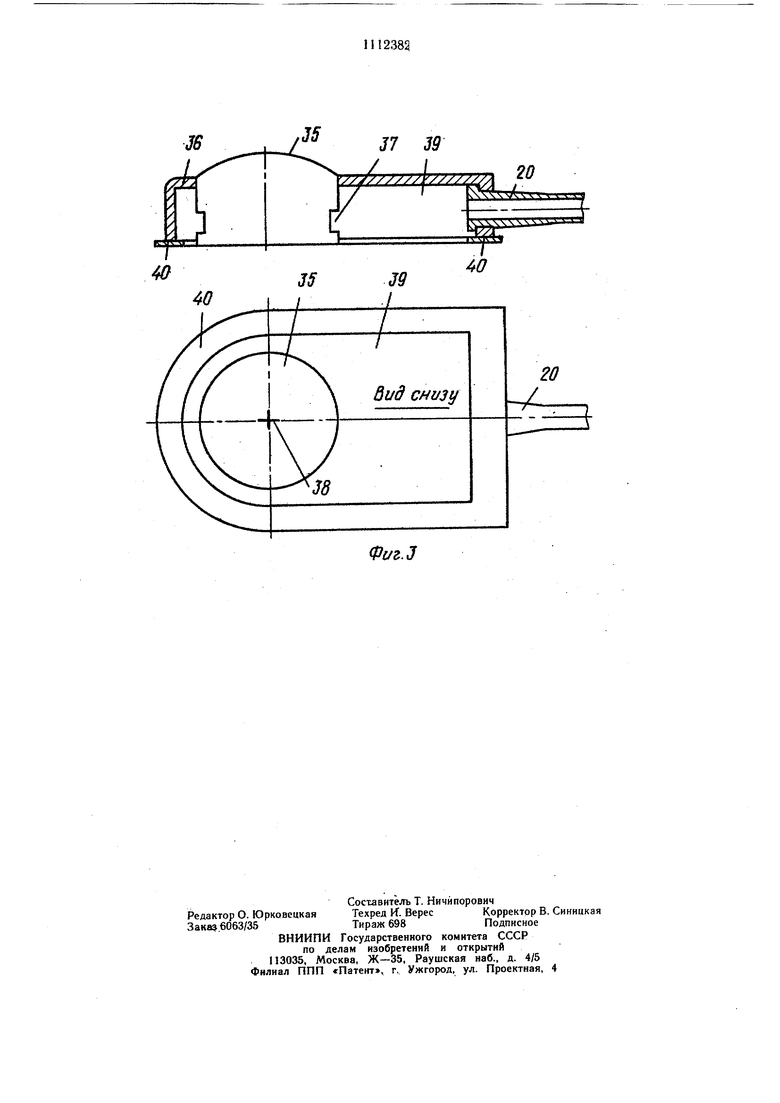
На фиг. I представлена блок-схема измерительной системы устройства по одной из координатных осей и вакуумной системы прижима съемника координат к носителю; на фиг. 2 - функциональная схема блока формирования координат;на фиг. 3 - конструкция съемника координат.
Измерительная система устройства содержит синусную и косинусную системы I и 2 координатных щин, уложенные в плоскости измерений с постоянным периодом укладки, индуктивно связанные с цилиндрической катушкой съемника 3 координат, подключенной к усилителю 4 тока, вход которого соединен с выходом полосового фильтра 5, генеpatbp 6 импульсов, выход которого соединен с входом делителя 7 частоты, выходом подключенного к входу полосового фильтра, сумматор 8, дифференцирующим и суммирующим входами подключенный к выходам синусной и косинусной систем 1 и 2 координатных шин, а выходом - к фазовому компаратору 9, выход которого соединен с первым входом элемента И 10, другие входы которого подключены к разрядным выходам делителя частоты, а выходы - к входам блока II формирования кодов координат, управляющий вход которого соединен с выходом компаратора 9, и блок 12
коррекции фазовых искажений, входами соединенный с разрядными выхюдами делителя 7 частоты, а выходами -- с входами сумматора 8, содержащего операционный усилитель 13, конденсатор 14 (дифференцирующий вход), резисторы 15 (суммирующие входы) и резистор 16 в цепи отрицательной обратной связи.
Электропневмопреобразователь 17 содержит вакуумный насос 18, узел 19 управления и трубопроводы 20, один из которых соеди0 нен с вакуумной камерой съемни1{а 3 координат.
Блок 11 формирования кодов координат {фиг. 2) содержит триггер 21, (логические) элементы И 22 и 23, последовательно соеди, ненные первый счетчик 24 (для измерения сдвига фаз), инвертор 25, регистр 26, сумматор 27, схему 28 сравнения И элемент 29 задержки, а также последовательно соединенные второй счетчик 30 (числа периодов), первый коммутатор 31, второй коммутатор 32
0 узел 33 памяти и узел 34 вывода координат, i Счетный вход триггера 21 соединен с выходом компаратора 9, первыми входами элементов И 22 и 23 и входом управления счетчика 24, разрядные входы которого соединены с выходами элемента И 10, а выходы - с входами инвертора 25, сумматора 27 и коммутатора 31, выходы двух самых старших разрядов соединены с вторым и третьим входами элементов И 22 и 23, а выход последнего старшего разряда, кроме того,
соединен с другими входами триггера 21, выходами соединенного с четвертыми входами элементов И 22 и 23, выходы которых соединены с входами счетчика 30. Выход элемента 29 задержки соединен с управляющим входом регистра 26. Выход схемы 28
5 сравнения, кроме того, соединен с управляющим входом коммутатора 31. Одни из выходов коммутатора 32 соединены с соответствующими входами узла вывода координат (для сопряжения с ЭВМ), а управляющие входы коммутатора 32 и узла 33 памяти соединены с управляющим входом узла 19 управления электропневмопреобразователя 17 и подключены к выходу ЭВМ.
Съемник 3 координат (фиг. 3) состоит 5 из окуляра 35, который закреплен в корпусе 36 и является основой для намотки на него катушки 37 и нанесения визира 38. Корпус съемника координат образует камеру 39, из которой воздух откачивается через трубопровод 20. Надежный прижим съемника координат к носителю обеспечивает резиновая прокладка 40.
Устройство работает следующим образом.
В момент включения устройства генератор 6 начинает формировать тактовые импульсы, следующие через равные интервалы времени, пропорциональные величине установленной дискретности кодового представления измеряемых координат. При поступлении указанных импульсов в делитель 7 частоты последним вырабатывается ряд периодических сигналов с кратными частотами.
Первый сигнал из этого ряда (наименьщей частоты) поступает через полосовой 5 и усилитель 4 тока в катушку съемника координат. Ток, протекая в катушке съемника координат, возбуждает электромагнитное пс5ле, которое наводит на проводники синусной и косинусной систем щин периодические сигналы.
Поступая на дифференцирующий и суммирующий входы усилителя, эти сигналы вёкторно суммируются один с другим и одновременно складываются с периодическими сигналами, поступающими на остальные входы усилителя с выхода блока 12 коррекции. При этом на выходе усилителя 13 формируется результирующий сигнал, который при перемещениях съемника координат с Высокой степенью точности сохраняет синусоидальный закон своего изменения.
Полученный таким образом сигнал, поступая на вход фазового компаратора 9, сравнивается по фазе с опорным синусоидальным сигналом, поступающим с выхода фильтра 5.
Сигнал рассогласования фаз с выхода компаратора 9 поступает в качестве стробирующего сигнала на входы элемента И 10, через который код сдвига фаз с делителя 7 частоты переписывается в регистр 26 блока И.
Поскольку координата X от О до своей максимальной величины меняется несколько раз в пределах рабочего поля считывания, то номер рамки может быть определен путем непрерывного анализа переходов фазы через целые периоды. В блоке 11 этот анализ осуществляет схема управления счетчиком 30 периодов, собранная на элементах 21-23, )соторая на основании состояний старших разрядов регистра 26 фиксирует момент его перехода от состояния максимального заполнения в нулевое и наоборот. При этом в счетчик 30 либо заносится единица, либо вычитается из него. Полный код измерений координаты форм«руется на разрядных выходах счетчиков 30 и 24, причем код счетчика 30 указывает на целое число периодов укладки шин, пройденных съемником координат, а код счетчика 24 - на положение центра
катущки съемника координат в одном из периодов укладки шин, т, е. на дробную часть периода.
Однако полный код измеренной коорди-наты поступает на выходы коммутатора 31 лишь в том случае, когда съемник координат перемещается. Это происходит следующим образом.
Код измеренного фазового сдвига (дробная часть периода укладки шин) записывает0 ся в счетчик 24, а инверсный код - в регистр 26.
По окончании измерительного цикла коды из счетчика 24 и регистра 26 передаются в сумматор 27 При этом при переме щеиии съемника координат код счетчика 24 каждый цикл изменяется, а код регистра 26 остается первоначально записанным. Разница чисел, снимаемая с выхода сумматора, сравнивается в схеме 28 сравнения с постоянным числом, задаваемым с пульта опера0 тора по шине а. Это число определяет шаг квантования считываемого изображения. Код регистра 28 в процессе измерений остается постоянным до тех пор, пока код текущей координаты в счетчике 24 не изменится
g на величину шага квантования (величину константы задаваемой по шине о)..При этом схема 28 сравнения вырабатывает сигнал А В или А В, где А - разность чисел, поступающая с выхода сумматора; В - константа, задаваемая с пульта оператора,
0 который разрещает передачу текущей координаты на выход коммутатора 31 и осуществляет перезапись новой координаты из счетчика 24 в регистр 26.
Коммутатор 31 содержит элемент ИЛИ и элементы И, одни входы которых соедиие5 ны с разрядными выходами счетчиков 24 и 30, а другие объединены и подключены к выходу элемента ИЛИ, на два входа которого поступают сигналы с выходов схем 28 сравнения обоих блоков формирования коQ дов координат (вторая связь на фиг. 2 не показана).
Электрическая схема блоков формирования кодов координат выполнена таким образом, что для выдачи координат во внешнее устройство достаточно смещения съемника
5 координат в направлении одной из коорди ватных осей на заданный шаг. При этом минимальный шаг квантования выбирается из соображения достаточно детального описания траектории перемещения съемника координат и обеспечения возможности достаточно точного восстановления текущих координат на стороне ЭВМ.
Если канал связи свободен, то-ЭВМ устанавливает коммутатор 32 в режим .передачи кодов координат через узел 34 с ЭВМ. Если
е канал занят, коммутатор переключается и считываемая информация начинает поступать в узел 33 памяти. Одновременно с сигналом занятости канала с помощью электропневмопреобразователя .вакуумная камера съемника 3 координат через трубопровод 20 соединяется с вакуумным насосом 18. В результате съемник 3 координат с некоторой задержкой прихватывается в поверхности поля считывания, его перемещение прекращается, а значит, прекращается считывание информации.
Как только канал связи освобождается, ЭВМ возвращает коммутатор в исходное состояние, переводит узел 33 в режим считывания информации из памяти и отключает вакуумный насос. Информация, записанная в памяти узла 33 с возможной максимальной скоростью, передается в ЭВМ через узел 34 вывода координат, съемник 3 координат теряет сцепление с поверхностью планшета, и оператор может продолжать отслеживание контура изображения.
Экспериментально установлено, что полная фиксация съемника координат предлагаемой конструкции по сигналу ЭВМ происходит с запаздыванием, не превыщающим
0,2 с. Максимальная скорость движения съемника координат при считывании непрерывных контуров равна 20 мм/с. При этом с момента приема сигнала занятости канала до момента останова съемника координат он смещается на величину около 4 мм. Это значит, что если выбранный шаг квантования информации, задаваемый оператором, равен 1 мм, то в схему памяти будет записано лищь четыре значения координат. При шаге считывания в 0,5 мм (самый распространенный шаг квантования при полуавтоматическом считывании) потребуется соответственно память на восемь слов. Таким образом устройство требует минимальных затрат для повыщения надежности при считывании.
При эксплуатации предлагаемых устройств в составе автоматизированных рабочих мест время прерывания связи обычно незначительно и оператором в процессе работы зачастую не обнаруживается, а ошибки и сбои в процессе считывания полностью исключаются.
J7 39
20
Фс/a.J
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ отопления гретым воздухом | 1922 |
|
SU340A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Авторское свидетельство СССР № 922817, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
