1
(21)4748967/24 (22) 12.10,89 (46)15.11.91. Бюл.№42
(71)Научно-производственное объединение Роса втоматстром
(72)В.Б.Воротников и Б.Э.Шехтер {53)681.178(088.8)
(56)Авторское свидетельство СССР № 744679, кл. G 06 М 7/02, 1978.
(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭЛЕМЕНТОВ, ПЕРЕМЕЩАЕМЫХ ТЯГОВЫМ ОРГАНОМ
(57)Изобретение относится к техническим
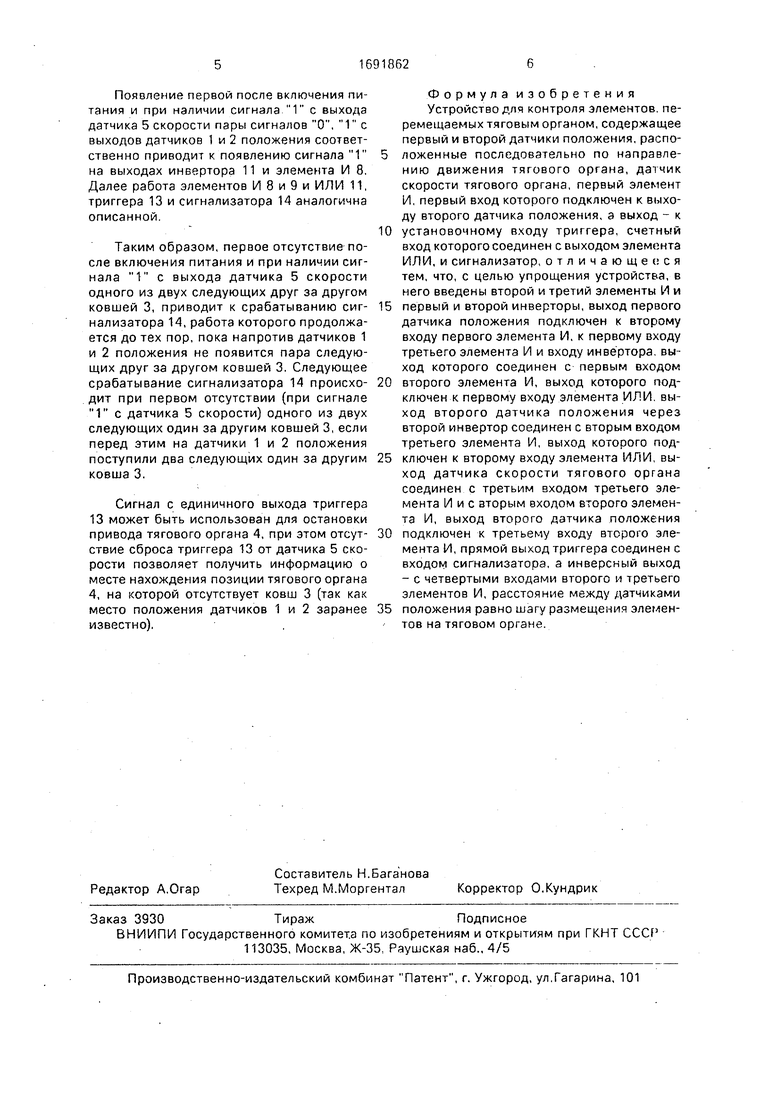
средствам информационных систем. ЦРЛЬ изобретения - упрощение устройства. Устройство содержит два датчика 1 и 2 положения, расположенные последовательно по направлению движения тягового органа, датчик 5 скорости тягового органа, элементы И 7 - 9, ИЛИ 10, триггер 13 и сигнализатор 14. Размещение датчиков положения на расстоянии, равном шагу размещения элементов тягового органа, и подключение элементов устройства между собой дает возможность получить сигнал о недостающих ковшах, скребках и т.д. тягового органа 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости | 1989 |
|
SU1675781A1 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Автоматическое весоизмерительное устройство | 1981 |
|
SU974137A1 |
| Устройство для регистрации веса в динамике | 1983 |
|
SU1153239A1 |
| Устройство для настройки регулятора тока возбуждения тягового дизель-генератора | 1983 |
|
SU1258724A1 |
| Устройство автоматического регулирования скольжения колес автомобиля в тяговом режиме | 1985 |
|
SU1588579A1 |
| Цифровой многоинтегральный прибор для тензометрических весов | 1982 |
|
SU1030661A1 |
| Система управления рабочим органом землеройной машины | 1988 |
|
SU1548365A1 |
| Устройство контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1754593A1 |
| Устройство для счета штучных предметов,перемещаемых конвейером | 1984 |
|
SU1161974A1 |
Ё
Изобретение относится к техническим средствам информационных систем и может быть использовано для контроля элементов, перемещаемых тяговым органом в отраслях промышленности, использующих ковшовые элеваторы, конвейеры и конвейеры со скребками, например в промышленности строительных материалов
Известно устройство контроля недостающих контейнеров, содержащее чувствительные головки, схему управления и датчик наличия блоков контейнеров.
Недостатком указанного устройства являются низкие функциональные возможности, а именно отсутствие контроля недостающих контейнеров при их размещении на заранее заданном расстоянии один от другого.
Наиболее близким по технической сущности к предлагаемому является устройство для контроля элементов, перемещаемых тяговым органом, например конвейером, содержащее два датчика положения, расположенные последовательно по направлению движения тягового органа, датчик скорости тягового органа, последовательно соединенные счетчик и одновибратор, элемент И, элемент ИЛИ, последовательно соединенные первый триггер, элемент задержки сигнала и второй триггер, сигнализатор и счетчик элементов, при этом вход Запуск счетчика импульсов подключен к первому датчику, выход одновибратора соединен с одним из входов элементов И и ИЛИ, другие входы которых подключены к второму датчику, первый вход первого триггера соединен с выходом элемента ИЛИ, второй вход первого триггера соединен с одним выходом элемента И, другой выход которого и выход второго триггера объединены и подключены к сигнализатору, из выходов элемента И соединен со сче пиком элементов, датчик скорости тягового органа соединен со счетным входом кольцевого счетчика импульсов.
Недостатком известного устройства для контроля элементов, перемещаемых тяговым органом, является сложность.
Цель изобретения - упрощение устройства.
На чертеже приведена функциональная схема устройства.
Устройство содержит первый и второй датчики 1 и 2 положения, расположенные по направлению движения элементов 3, например ковшей, жестко закрепленных на тяговом органе 4, датчик 5 скорости тягового органа 4, приводной барабан 6, первый, второй и третий элементы И 7 - 9, элемент ИЛИ 10, первый и второй инверторы 11 и 12,
триггер 13 и сигнализатор 14, причем расстояние между датчиками 1 и 2 положения равно шагу ш размещения элементов 3 на тяговом органе 4
Тяговый орган 4 перемещается вокруг
приводного барабана б и натяжного барабана (не показан)
Устройство работает следующим образом.
0При включении питания триггер 13 устанавливается в исходное состояние, при этом на его единичном выходе имеется сигнал 0, а на нулевом выходе - сигнал Ч При нахождении элемента, например, ков5 ша 3, напротив датчика 1 положения на его выходе имеется сигнал 1, а при отсутствии ковша 3 - сигнал О. Датчик 2 положения работает аналогично датчику 1 положения При включении привода (не показан) натяж0 ного барабана 6 тяговый орган 4 и ковш 3 начинают перемещаться вдоль датчиков 1 и 2 положения
При достижении тяговым органом 4 после включения привода заданной скорости
5 на выходе датчика 5 скорости появляется сигнал 1. При перемещении ковшей 3 вдоль датчиков 1 и 2 положения на их выходах могут появляться следующие пары сигналов: 1, 1 - напротив обоих датчиков 1
0 и 2 имеются ковши 3; 1, О - напротив второго датчика 2 отсутствует ковш 3; О, 1 - напротив первого датчика 1 отсутствует ковш; О, О - напротив обоих датчиков 1 и 2 отсутствуют ковши 3
5 Одновременно появление сигналов 1 на выходах датчиков 1 и 2 положения приводит к появлению сигнала 1 на выходе элемента И 7, устанавливающего триггер 13 в исходное состояние Появление первой
0 после включения питания и при наличии сигнала 1 с выхода датчика 5 скорости пары сигналов 1, О с выходов датчиков 1 и 2 положения соответственно приводит к появлению сигнала 1 на выходах инвертора
5 12 и элемента И 9. Сигнал 1 с выхода элемента И 9 проходит через элемент ИЛИ 10 на первый вход триггера 13, который при этом переводится в единичное состояние, и на его единичном выходе появляется, а на
0 нулевом выходе исчезает сигнал 1 (т.е. на нулевом выходе триггера 13 появляется сигнал О). Появление сигнала 1 на единичном выходе тршгера 13 приводит к срабатыванию сигнализатора 14, а появле5 ние сигнала О ча нулевом выходе триггера 13 приводит к запрету появления сигнплов 1 на выходах элементов И 8 и 9 и ИЛИ 10 (т е. сигнализатор 14 будет включен до тех пор пока на выходах датчиков 1 и 2 положения не появится пара сигналов 1, 1)
Появление первой после включения питания и при наличии сигнала 1 с выхода датчика 5 скорости пары сигналов О, 1 с выходов датчиков 1 и 2 положения соответственно приводит к появлению сигнала 1 на выходах инвертора 11 и элемента И 8. Далее работа элементов И 8 и 9 и ИЛИ 11, триггера 13 и сигнализатора 14 аналогична описанной.
Таким образом, первое отсутствие после включения питания и при наличии сигнала 1 с выхода датчика 5 скорости одного из двух следующих друг за другом ковшей 3, приводит к срабатыванию сигнализатора 14, работа которого продолжается до тех пор, пока напротив датчиков 1 и 2 положения не появится пара следующих друг за другом ковшей 3. Следующее срабатывание сигнализатора 14 происходит при первом отсутствии (при сигнале 1 с датчика 5 скорости) одного из двух следующих один за другим ковшей 3, если перед этим на датчики 1 и 2 положения поступили два следующих один за другим ковша 3.
Сигнал с единичного выхода триггера 13 может быть использован для остановки привода тягового органа 4, при этом отсутствие сброса триггера 13 от датчика 5 скорости позволяет получить информацию о месте нахождения позиции тягового органа 4, на которой отсутствует ковш 3 (так как место положения датчиков 1 и 2 заранее известно).
Формула изобретения Устройство для контроля элементов, перемещаемых тяговым органом, содержащее первый и второй датчики положения, расположенные последовательно по направлению движения тягового органа, датчик скорости тягового органа, первый элемент И, первый вход которого подключен к выходу второго датчика положения, а выход - к
установочному входу триггера, счетный вход которого соединен с выходом элемента ИЛИ, и сигнализатор, отличающееся тем, что, с целью упрощения устройства, в него введены второй и третий элементы И и
первый и второй инверторы, выход первого датчика положения подключен к второму входу первого элемента И, к первому входу третьего элемента И и входу инвертора, выход которого соединен с первым входом
второго элемента И, выход которого подключен к первому входу элемента ИЛИ, выход второго датчика положения через второй инвертор соединен с вторым входом третьего элемента И, выход которого подключей к второму входу элемента ИЛИ, выход датчика скорости тягового органа соединен с третьим входом третьего элемента И и с вторым входом второго элемента И, выход второго датчика положения
подключен к третьему входу второго элемента И, прямой выход триггера соединен с входом сигнализатора, а инверсный выход - с четвертыми входами второго и третьего элементов И, расстояние между датчиками
положения равно шагу размещения элементов на тяговом органе.
