динен с входом первого порогового элемейта и является первым входом блока, выходы пороговых элементов через соответствующие интегрирующие элементы подключены к входам второго элемента И, выходы первого и второго элементов И соединены с входами первого и второго триггеров, выходы которых являются первым и вторым выходом блока, вход, инвертора является вторым входом блока и подключен к первым входам третьего и четвертого триггеров, а выход инвертора подключен к вторым входам этих же триггеров, выходы которых через соответствующие дифференцирующие элементы соединены с входами элемента ИЛИ, выход которого соединен с вторым входом первого элемента И, вход второго порогового элемента является третьим входом блока, а выход одного из интегрирующих элементов является третьим. выходом блока.
4. Устройство по п. 1, отличающееся тем, что блок коррекции усилий содержит регистры, блоки переменных коэффициентов, усилитель, регулятор динамической составляющей и дешифраторы, выходы которых подключены к управляющим входам соответствующих блоков переменных коэффициентов, выход каждого предыдущего блока переменных коэффициентов соединен с входом последующего блока переменных коэффициен тов, вход первого блока переменных коэффициентов является шестым входом блока, входы первого и второго дешифраторов являются соответственно четвертым и пятым входами блока, выходы регистров соеди-. нены с входами третьего и четвертого дешифраторов, а лходы их являются первым и входами блока, выход псследнего блока переменных коэффЯ циентов соединен с одним из входов усилителя и с управляющим входом регулятора динамической составляющей, подключенного к усилителю, другой вход которого является первым входом блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для учета работы транспортного оборудования | 1984 |
|
SU1182123A2 |
| Устройство для измерения работы экскаватора-драглайна | 1976 |
|
SU634232A1 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Устройство для измерения работы экскаватора драглайна | 1976 |
|
SU737575A2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU293940A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |
1. УСТРОЙСТВО ДЛЯ УЧЕТА РАБОТЫ ТРАНСПОРТНОГО ОБОРУДОВАНИЯ, содержащее датчик длины тягового каната, блок выделения статической составляющей тока, датчик поворота платформы, соединенный через блок измерения угла поворота с одним из входов вычислителя количества работы, второй вход которого подключен к первому выходу блока измерения загрузки ковма, отличающеес я тем, что, с целью повышения точности работы устройства, оно снабжен 1шатчиком длины подъема каната, дЛчиком скорости двигателя подъема, блоком управления, блоком коррекции усилий и датчиком тока возбуждения двигателя подъема, при этом датчик длины подъема каната, датчик длины тягового каната и датчик скорости двигателя подъема подключены соответственно к первому, второму и третьему входам блока коррекции усилий, выходы блока выделения статической составляющей тока и датчика поворота платформы подключены к входам блока управ1}еняя и к первому и второму входам блока измерения загрузки ковша, третий и четвертый входы которого соединены с первым и вторым выходами блока управления, третий выход которого соединен с первым входснм вычислителя количества работы, при этом выход датчика тока возбуждения двигателя подъема соединен с пятым входом блока измерения нагрузки ковша, второй и третий выходы которого соеди- иены с четвертым и пятым входами блока коррекции усилий, шестой вход которого подключен к выходу блока ; вьщеления статической составлякицей тока, а выход - с шестым входом бло-. ка измерения нагрузки ковша. 2.Устройство по п.1,от л и чающееся тем, что блок измерения загрузки ковша содержит коммутатор, аналого-цифровой преобразо g ватель, элементы ИЛИ и И, триггер И счетчик-сумматор, при этом выход коммутатора через цифро-аналоговый преобразователь подключен к первьм входам триггеров и элементов И, выходы последних подключены к первому и второму входам счетчика-сумматора, выход элемента ИЛИ через распределитель импульсов соединен с вторыми . входами триггеров, с одним из входовкоммутатора и третьим входом счетчи-; ка-сумматора, выход которого являет-, ся первым выходом блока, выходы триг- геров являются вторым и третьим выходами блока, другие входы коммутатора являются первым, вторым, пятым и шестым входами блока, входы элемен та ИЛИ объединены соответственно с вторыми входами элементов Ни являются третьим и четвертым входами блока. 3.Устройство по п. 1, о т л и чающееся тем,что блок управления содержит триггеры, элементы И и ИЛИ, дифференцирующие элементы, интегрирующие элементы, пороговые элементы, инвертор и блок задержки, выход которого соединен с первым входе первого элемента И, а вход объе
1
.Изобретение относится к области автоматизации горно-транспортного оборудования, например экскаваторов- дрогл айнов.
Известны устройства/ позволяющие оценивать работы экскаваторов по обобщенным показателям при помощи измерителей мощности/ выполненных в виде установленных на платформе и . рабочем оборудовании вибрационных датчиков/ связанных с пороговыми элементами , инверторами, усилителями/ триггерами/ содержащие накопитель циклов и времени работы вхолостую/ счетчик операций, блок кодирования и передачи информации/ а также блок приема и накопления информации Y.
Указанное устройство не позволяет определить массу экскавируемой пороДЬ.
Известно устройство для учета выработки одноковшового экскаватора/ устраняющее неопределенность при определении массы экскавируемой породы, включающее магнитные усилители с обмотками управления, датчики тока привода подъема И привода напора/ датчики угла поворота/ счетчики импульсов/ включенные в электрическую цепь/ причем намагничивающая обмотка управления одного из магнитных усилителей подключена к датчику тока привода подъема/ а его размагничивавщая обмотка управления посредством
блрк-контакта счетчика импульсов соединена с датчиком привода напора, а обмотка положительного смещения этого магнитного усилителя соединена е датчиком угла поворота и посредством запирающего элемента - с датчиком тока привода напора 2j .
Область примене Ния этого устройства ограничена, так как оно разработано прим€шительно к экскаватору с оборудованием прямой и обратной лопаты и полностью не может быть использовано для учёта работы экскаватора-дроглейна/ кроме того/ выполнено на элементах/ не обеспечивающих достаточной точности в определении массы эксказЛруемого материала.
Известно.устройство для учета выр0 ботки экскаватора, включающее логический блок и блоки измерения величины загрузки ковша/ фиксации области пространства/ измерения угла поворота платфо1 «ы экска ватора, датчики длин тягового и подъемного канатов, угла поворота платфор1Ф1 и величины загрузки ковша, блок измерения высоты подъема ковша/ один из входов которого через схему И соединен с выходами блока фиксации области пространства и логического блока/, другие входы .соединены с выходами логического блока/ блока измерения угла поворота гш платформы и блока измерения величины загрузки ковша з .
Недостатком этого устройства являтся низкая точность и достоверность . чета работы, обусловленная измене-ием магнитного потока в обмотках озбуждения двигателей механизма одъема из-за изменения температурных 5 условий, технологических режимов работы двигателей механизма подъема, а также из-за изменения коэффициента полезного действия механизма подъема вследствие изменения мощности Ю на его валу в зависимости от степени наполнения ковша или при различном объемном весе транспортируемого материала и изменения режимов работы двигателей механизма подъема. 15
Кроме того, низкая точность и достоверность обусловливается еще и необходимостью измерения массы ковша лишь в определенной фиксированной точке траектории движения ковша. 20
Наиболее близким к изобретению по технической сущности является устройство, обладающее большими функциональными возможно стями и достоверностью учета работы экскаватора, 25 содержгицее длины тягового каната, блок выделения статической составяющей токи, датчик поворота платформы, соединенный через блок измеения угла поворота с одним из входов, вычислителя количества работы, второй вход которого подключен к перво у выходу блока измерения загрузки ковша 4 .
Однако в известном устройстве датчиком загрузки ковша не обеспечивает-35 ся достаточная точность измерения выполненной экскаватором работы в связи с тем, что схемой не учитывается изменение магнитного потока в обмотках возбуждения из-за изменения 40 температурных условий и технологических режимов работы двигателей механизма подъема, а также из-за изменения коэффициента полезного действия двигателей при изменении мощности на дс его валу в зависимости от заполнения ковша и объемного веса транспортируемого материала.
Кроме того, устройством не обеспечивается измерение массы разгруженного ковша и налипшего на нем материала (породы и полезного ископаемого) .
Целью изобретения является повышение точности учета работы транспортного оборудования.55
Поставленная цель достигается тем, что устройство для учета работы транспортного оборудования, содержащее датчик длины тягового каната, блок выделения статической составляющей 60 тока, датчик поворота платформы, соединенный через блок измерейия угла поворота с одним из входов вычислителя количества работы, второй вход которого подключен к первому выходу j
блока измерения загрузки ковша, снабжено датчиком длины подъема каната, датчиком скорости двигателя подъема, Ълоком управления, блоком коррекции усилия и датчиком тока возбуждения двигателя подъема, /при этом датчик длины подъема каната, датчик длины тягового каната и датчик скорости двигателя подъема подключены соответственно к первому, второму и третьему входам блока коррекции усилий, выходы блока выделения статической составляющей тока и датчика поворота платформы подключены к входам блока управления и к первому и второму входам блока измерения загрузки ковша, третий и четвертый входы которого соединены с первым и вторым выходами блока управления, третий выхо которого соединен с первым входом вычислителя количеиства работы, при этом выход датчика тока возбуждения двигателя подъема соединен с пятым входом блока измерения загрузки ковша, второй и третий выходы которого соединены с четвертым и пятым входами блока коррекции усилий, шестой вход которого подключен к выходу блока выделения статической составляющей тока, а выход - с шестым входом блока измерения нагрузки ковша.
При этом блок измерения загрузки ковша содержит коммутатор, аналогоцифровой преобразователь, элемен- г-: ты ИЛИ и и, триггер и счетчик-сумматор, при этом выход коммутатора через цифро-аналоговый преобразователь подключен к первым входам триггеров и элементов -И, выходы последних подключены к первому и второму входам счетчи-ка-сумматора, выход элемента ИЛИ через распределитель импульсов соединен с вторыми входами триггеров, с одним из входов коммутатора и третьим входом счетчика-сумматора, выход которого является первым выходом блока, выходы триггеров являются вторым и третьим выходами блока, другие входы коммутатора являются первым, вторым, пятым и шестым входами блока, входы элемента ИЛИ объединены соответственно с вторыми входами. элеме1нтов И и являются третьим и четвертым входами блока.
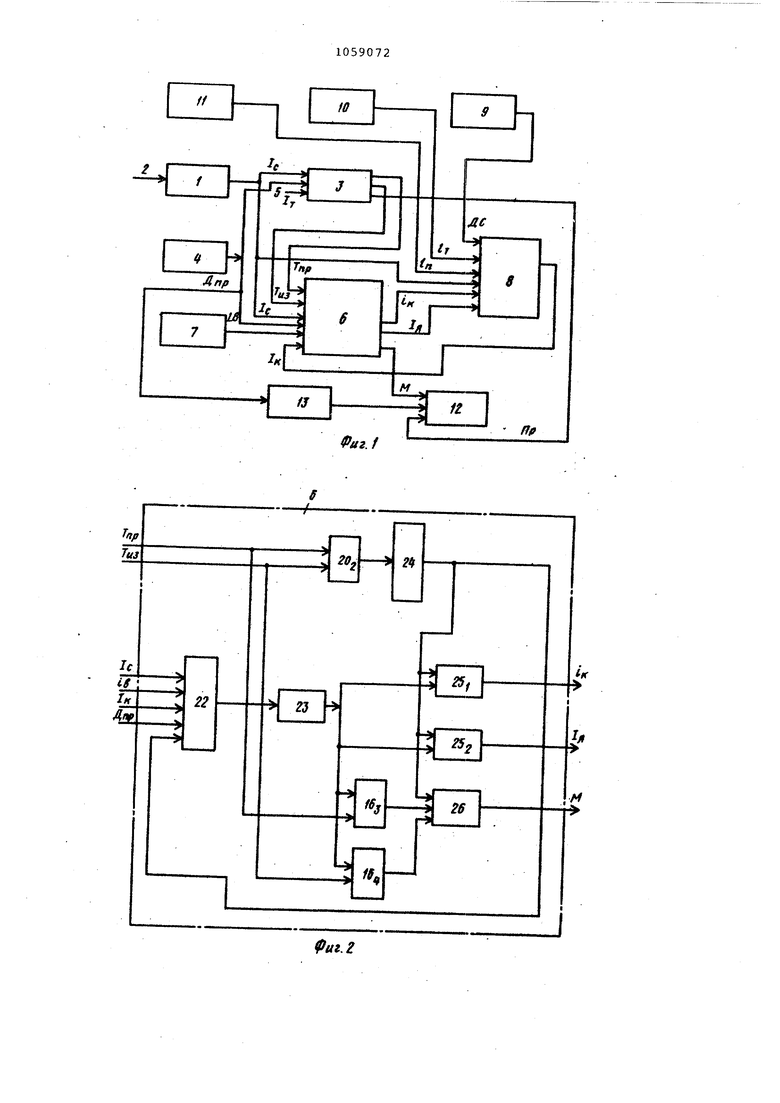
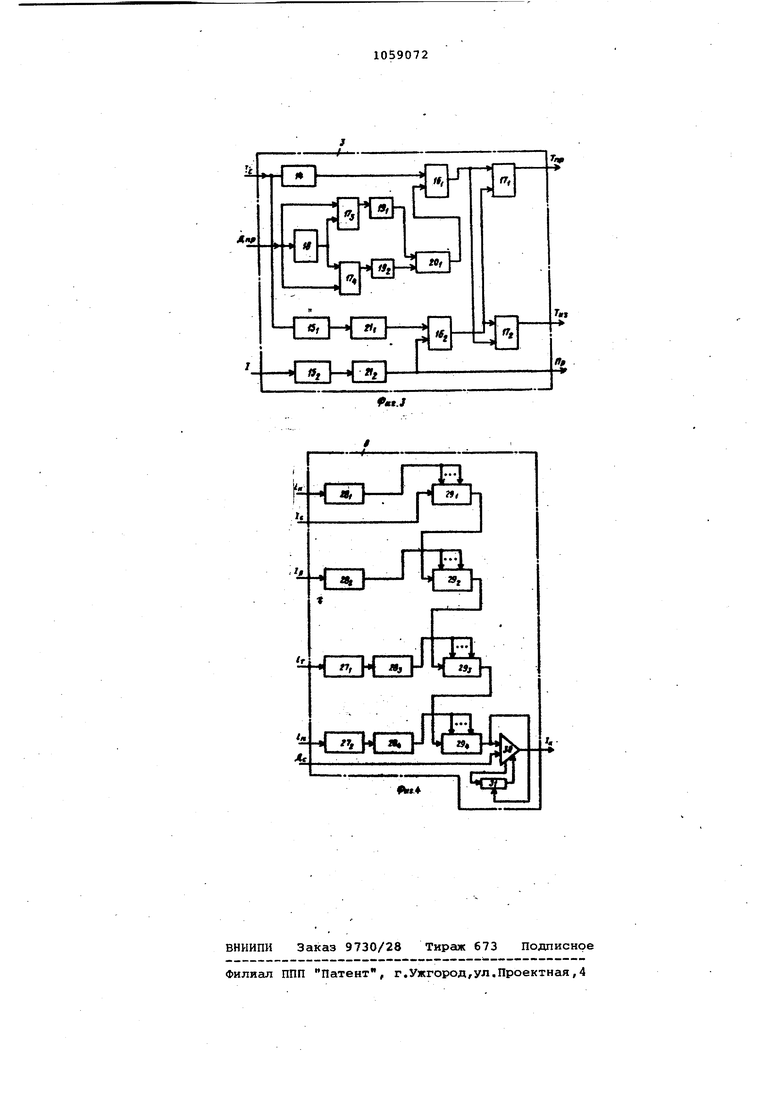
Кроме того, блок управления содержит триггеры, элементы И и ИЛИ/ дифференцирующие элементы, интегрирующие элементы, пороговые элементы, инвертор и блок задержки, выход которого соединен с первым входом первого элемента И, а вход объединен с входом первого порогового элемента и является первым входом блока, выходы пороговых элементов через соответствующие интегрирующие элементы подключены к входам второго элемента И, выходы первого и второго элементов И соединены с входами первого и второг триггеров, выходы которых являются первым и вторым выходом блока, вход инвертора является вторым входом бло ка и подключен к первым входам треть го и четвертого триггеров, а выход инвертора подключен к вторым входам этих же триггеров, выходы которых че рез соответствующие дифференцирующие элементы соединены с входами элемента ИЛИ, выход которого соединен с вторым входом первого элемента И, вход второго порогового элемента является третьим входом блока, а выход одного из интегри{5ую1дих элементов является третьим выходом блока. Блок коррекции усилий содержит регистры, блоки переменных коэффицие тов, усилитель, регулятор динамической составляющей и дешифраторы, выходы которых подключены к управляющим входам соответствующих блоков переменных коэффициентов, выход каждого предыдущего блока переменных коэффициентов соединен с входом последующего блока переменных коэффицие тов, вход первого блока переменных коэффициентов является шестым входом,блока, входа первого и второго дешифраторов являются соответственно четвертым и пятым входами блока, выходы регистров соединены с входами третьего и четвертого дешифраторов, а входы их являются первым и вторым входами блока, выход последнего блока переменных коэффициентов соединен с одним из входов усилителя и с упра ляющим входом регулятора динамической: составляющей, подключенного к усилителга, другой вход которого является третьим входом блока. На фиг. 1 изображена блок-схема устройства; на фиг. .2 - фунцциональная схема блока измерения загрузки ковша; на фиг, 3 - функциональная схема блбка управления; на фиг. 4 функциональная схема блока коррекции усилия. . Устройство включает блок 1 выделе ния статической составляющей тока, связь 2 блока 1 с опорными цепями двигателя подъема, блок 3 управления датчик 4 поворота платформы, связь 5 блока 3 с якорными цепями двигателя тяги, блок б измерения загрузки ковша, датчик 7 тока возбуждения двигателя, блок 8 коррекции усилия, датчик 9 скорости двигателя подъема, датчик 10 длины тягового каната дат чик 11 длины подъемного каната, вычислитель 12 количества работы, блок 13 измерения угла поворота плат формы, блок 14 задержки, пороговые элементы 15,, и I5i, элементы И 16 и 16j , триггеры 17 - l7| , инвертор 18, дифференцирующие элементы 1 и 192/ элементы ИЛИ204 и 20 г интег рирующие элементы 21; и 22, коммутатор 22, аналого-цифровой преобразователь 23, распределитель 24 импульсов, . регистры 25, и 2bf , счетчик-сумматор 26, регистры 27| и 27, дешифраторы 28(| - 28 , блоки 29| - 29. переменных коэффициентов, усилитель 30 регулятор 31 динамической составляющей. Устройство работает следующим образом. При поступлении бигнала, пропорционального массе ковша, с блока 1 выделения статической составляющей тока двигателя подъема на первый пороговый элемент 15 и через интегрирующий элемент 21, поступает сигнал на вход элемента И 16, на второй вход которого поступает сигнал с двигателя тяги через пороговый эле- мент ISj и интегрирующий элемент 212 обеспечивающий эадержку сигнала о выполнения операции копания (наличие сигнала -j- - тока двигателя тяги больше заданного) на время, необходимое для включения двигателя механизма подъему.. При совпадении сигналов С двигателя подъема и задержанного - с двигателя тяги устанавливается в еДинич- . ное состояние триггер 172 .измерения, подготавливая блок б измерения загрузки ковша к началу измерения массы загруженного ковша. В результате этого значение измеренной массы заполненного ковша с аналого-цифрового преобр 13ователя 23 поступает на второй вход счетчика-сумматора 26 через элемент И 16j по разрешению триггера 17 измерения. При повороте платформы после разгрузки ковша в блоке управления устанавливается в единичное состояние триггер 17i и в нулевое состояние триггер 172 измерения. По разрешающему потенциалу триггера 17| поворота запускается распределитель импульсов, подготавливается элемент И 164 для передачи кода, равного величине массы разгруженного ковша в счетчик-сумматор 26. Кроме того, с блока 1 выделения статической составляющей через блок 14 задержки обеспечивается задержка сигнала на время, равное включению механизма поворота после возможного выключения двигателя ковша при выполнении цикла экскавации. Сигнал с выхода линии задержки поступает на первый вход элемента И , подготавливая элемент И 16 для включения в единичное состояние триггер 17,( поворота. В зависимости от направления движения Ш1ат({юрмы зкскаватора сигналом с датчика 4 поворота платформы при помощи инвертора 18 устанавливается в единичное состояние триггер 17) поворота вправо или триггер 174 поворота влево, сигналы с триггеров 17.J и 17 после дифференци рования своими дифференцирующими элементами соответственно 19| и 19 поступают через элемент И 16. на еди ничный вход триггера 17 поворота и нулевой вход триггера 17,j. Разрешающим потенциалом, снимаемым с единичного выхода триггера 17 через элемент ИЛИ 20j, запускается распределитель- импуяьсов и выдается разрешение на второй вход элемента И le-j разрешая подачу сигнала, равного мас се разгруженного ковша, на вход реверсивного счетчика-сумматора 27 для определения масет передвинутого груза. Таким образом, триггер 17 устанав ливается в единичное состояние в случае, если происходит изменение направления движения платформы экска ватора и перед этим был сигнгш о наличии усилия в подъемном канате (наличие нагрузки на двигателе механизма подъема). Блок б измерения величины загрузки ковша обеспечивает поочередное преобразование аналоговых сигналов тока возбуждения двигателя подъема, статической сосз авляющей тока якоря двигателя подъема, скорректированной по току возбуждения, КПД ПРИВОда подъема. Подключение параметров к аналого-цифровому преобразователю осуществляется при помощи коммутатора 22 к аналого-цифровому преобразователю 23, выход которого подключен к входу регистра 25 тока возбуждения ресистра 26 якорного тока, пи входу элементов И 16.) и 164. Потенциал с триггера 17 поступает на второй вхо э.лемента И 16 разрешая с аналого-цифрового преобразователя 23 счетчиком-сумматором информации о , величине ядерного тока при нгшичин такто)вого сигнгша с распределителя 2 импульсов. Содержимое счетчика-сумматора передается в выходной блок 12 по сигналу с блока управления. Блок 8 коррекции усилия обеспечивает введение поправок в сигнал, сни маемый с блока 1 вьщеления статической составляющей тока двигателя подъ ема и пропорци.онгшьный массе ковша экскаватора. Сигнал с блока 1, проходя через блоки 29f - 29 перемен,ных коэффициентов на вход усилителя 30, видоизменяется в зависимости .от величины тока возбуждения, от непосредственно текущего значения статической составляющей тока подъема, длины подъемного и тягового канатов, а также от режима работы механизма подъема (подъем или опускание ковша). Формирование коррекции по току возбуждения осуществляется цепочкой: датчик 7, регистр 25, дешифратор 28 блок 29 переменных коэффициентов. При подаче с регистра 25 на дешифратор 29 значения тока возбуждения в цифровом виде позиционный код с дешифратора 29 j подключает в матрице сопротивлений блока переменных коэффициентов 294 соответствующую цепь сопротивлений. Коррекция по КПД двигателя подъема выполняется следующей цепью: регистр 252, дешифратор 2Ву, блок 292 переменных коэффициентов. Коррекция по длине тягового каната производится цепью, состоящей из датчика 10 длины тягового каната, регистра 27, деяифратора блока 29 переменных коэффициентов. Коррекция по длине подъемного каната осуществляется по следующей цепи: датчик 11 длины подъемного каната, регистр 27.д, даиифратор 284, блок 29 переменных коэффициентов. Коррекция по изменению . работы привода поДъема осуществ 1яется по цепи, включающей датчик 9 скорости двигателя подъема, усили тель 30. Таким образом, осуществление в предлагаемом устройстве коррекции усилия по изменению КПД привода подъема в зависимости от величины крутящего момента на валу двигателя по току возбуждения и по положению ковша в пространстве обеспечит повышение определения массы экскавируемого материала в ковше на 15% по сравнению известным устройством.
Фиг. г
Aif
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство оперативного дистанционного контроля работы землеройных машин с одномоторным приводом | 1972 |
|
SU473003A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА ВЫРАБОТКИ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 0 |
|
SU303634A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
