Изобретение относится к эемлерой- но-транспортным машинам, а именно к скреперам, бульдозерам, автогрейдерам и др.
Цель изобретения - повышение производительности путем обеспечения устойчивости и точности системы управления.
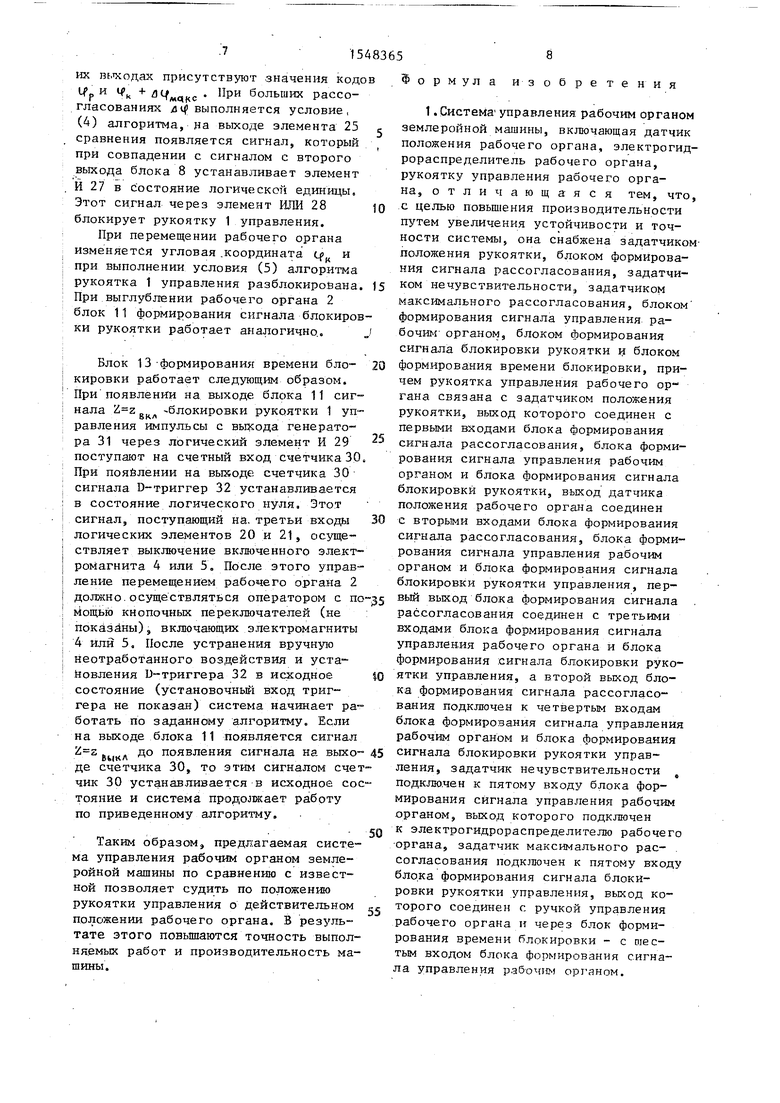
На фиг, 1- показана функциональная схема системы управления рабочим органом на фиг. 2 - электрогидравли-i ческая схема системы управления рабочим органом землеройной машины.
Система управления содержит рукоятку 1 управления рабочего органа (ковша) 2, датчик 3 положения рабочего органа, установленного в шарнире тяговой рамы и ковша 2. Электромагниты 4 и 5 электрогидравлического распределителя 6 связаны с выходами блока 7 формирования сигнала управления рабочим органом. Первый и второй входа блока 7 формирования сигнала управления рабочим органом объединены с первым и вторым входами блока 8 формирования сигнала рассогласования и с выходами задатчика 9 положения рукоятки управления и датчика 3 поло- яения рабочего органа соответственно. Третий вход блока 7 связан с выходом задатчика 10 нечувствительности. Четвертьй и пятый входы блока 7 форр° мирования сигнала управления рабочим органом объединены с четвертым и пятым входами блока 11 формирования сигнала блокировки рукоятки 1 управления и выходами блока 8 формирования сигнала рассогласования соответственно. Перый и второй входы блока 11 объединены с первым и вторым входами блока 7 соответственно, третий вход его подключен к выходу задатчика 12 максимального рассогласования, а выход его связан с входом блока 13
формирования времени блокировки (например,, электромагнитной муфты) и ме-I хйнически связан с рукояткой 1. Выход блока 13 подключен к шестому входу блока 7 управления рабочим органом.
0 Задатчик 9 положения рукоятки состоит из потенциометра 14 аналого-цифрового преобразователя 15. Датчик 3 положения рабочего органа выполнен аналогично задатчику 9 поло5 жения рукоятки. Блок 7 формирования сигнала управления рабочим органом содержит два сумматора 16 и 17, первые входы которых являются соответственно первым и вторым входами
0 блока 7. Вторые входы сумматоров 16 и 17 связаны с выходами коммутатора 18, Информационные входы коммутатора 18 являются третьим входом блока 7 8 а управляющие входы коммутато5 ра 18 являются четвертым и пятым входами его. Выходы сумматоров 16 и 17 подключены к первому и второму входам элемента 19 сравнения, выходы последнего связаны с первыми входами элеQ ментов И 20 и 21, вторые входы которых объединены с четвертым и пятым входами блока 7. Третьи входы элементов И 20 и 21 объединены и являются шестым входом блока 7, а их выходы
д являются выходами блока 7.
Блок Т1 формирования сигнала блокировки рукоятки управления содержит сумматоры 22 и 23, первые входы которых являются первым и вторым входами блока 11 соответственно, вторые входы их через коммутатор 24 подключены к третьему входу блока 11. Выходы сумматоров 22 и 23 подключены к входам элемента 25 сравнения, выходы последнего соединены с первыми входами элементов И 26 и 27t вторые входы которых соединены с управчяющими входами коммутатора 24 и являются соответственно четвертым и пятым входами
0
5
блока 11. Выходы элементов И 26 и 27 подключены к входам элемента ИЛИ 28, выход последнего является выходом блока 11.
Блок 13 формирования времени блокировки содержит элемент И 29, первы вход которого объединен с входом установки счетчика 30 и является входом блока 13. Второй вход элемента И 29 подключен к выходу генератора 31, а выход его связан со счетным входом счетчика 30. Выход последнего соединен с тактовым входом триггера 32,
и
выход которого является выходом бло- ка 13.
Алгоритм работы системы управлени можно представить следующими выражениями.
При заглублении рабочего органа
то X х,
4 p-ifK /J4 ; Если , Если ifps Чк +% Если ifp дЧ-адкс то ; Если M K+d4Wc, то Z zBWKA ; Если t-utfO,
1 вКЛ ТО Х- ХвЫКЛ I
ТО
Xi,
8ЫКЛ
(1)
(2) (3) (4) (5) (б)
25
При выглублении рабочего органа Ч р-Ч к Ч ;ДЧ 0;
Если + лМ н W Если qjp + flifM tfk,
то X2 xBkA; то X, вь|кл ;
Если фр+ДЧ макс Ч к , то
(7) (8) (9) (Ю)
30
Если + то Z zBHKA , далее повторяется условие (6).
В алгоритме использованы следующие величины: Ц , ерк- угловые координаты вход элемента И 20. Но включение
„ электромагнита 5 не происходит, так
При выполнении условия (2) алгоритма на втором выходе элемента 19 сравнения появляется сигнал, который поступает на первый вход элемента И 21, и так как на втором входе его присутствует сигнал с второго входа блока 8 формирования сигнала рассогласования, то на его выходе появляется сигнал, который переключает золотник электрогидрораспределителя на заглубление рабочего органа. При перемещении рабочего органа 2 изменяет ся угловая координата lfk на выходе датчика 3 положения рабочего органа.
При выполнении условия (3) алгоритма на втором выходе элемента 19 сравнения исчезает сигнал, выключае ся электромагнит 4 и прекращается з глубление рабочего органа. В этом случае на первом выходе элемента 19 сравнения появляется сигнал (услови (3)), которьй поступает на первый
положений рукоятки управления и рабочего органа ду- рассогласование ; ai - зона нечувствительности, обусловленная зазорами в шарнирах; дц7мс(кс- максимально допустимое рассогласование; t,ut - текущее время, время блокировки рукоятки; X1SX2- сигналы управления электромагнитами; хвкл х вь кл состояние электромагнитов электрогидрораспределителя; Z,
как на втором входе элемента И 20 присутствует сигнал логического О (т.е., выполняется условие ).
лл Таким образом, система отрабатывает рассогласование дц и приходит в нов устойчивое состояние. При выглублении рабочего органа система работ ет аналогично.
Блок 11 формирования сигнала блокировки рукоятки 1 управления при за глублении рабочего органа 2 работает следующим образом. Код с выхо да задатчика 12 максимального рассо/15
екл
z ... - сигнал блокировки рукоятОЫ К.Л
ки и ее включенное и выключенное состояние.
Система работает следующим образом.
При перемещении рукоятки 1 происходит изменение угловой координаты рукоятки 1 на выходе задатчика 9 положения рукоятки. При заглублении рабочего органа 2 выполняется условие на втором выходе блока 8 формирования сигнала рассогласования появляется сигнал управления коммутатором 18. При этом на второй вход сум8365
jg
|5
20
25
30
вход элемента И 20. Но включение
матора 16 поступает код 00...О с выходов коммутатора 18, а на второй вход сумматора 17 поступает значение кода зоны нечувствительности с выхода задатчика 10 нечувствительности сигнала рассогласования. На выходе сумматора 16 сформировано значение ifp, а на выходе сумматора 17 - , Коды с выходов сумматоров 16 и 17 поступают на входы элемента 19 сравнения.
При выполнении условия (2) алгоритма на втором выходе элемента 19 сравнения появляется сигнал, который поступает на первый вход элемента И 21, и так как на втором входе его присутствует сигнал с второго входа блока 8 формирования сигнала рассогласования, то на его выходе появляется сигнал, который переключает золотник электрогидрораспределителя на заглубление рабочего органа. При перемещении рабочего органа 2 изменяется угловая координата lfk на выходе датчика 3 положения рабочего органа.
При выполнении условия (3) алгоритма на втором выходе элемента 19 сравнения исчезает сигнал, выключается электромагнит 4 и прекращается заглубление рабочего органа. В этом случае на первом выходе элемента 19 сравнения появляется сигнал (условие (3)), которьй поступает на первый
как на втором входе элемента И 20 присутствует сигнал логического О (т.е., выполняется условие ).
Таким образом, система отрабатывает рассогласование дц и приходит в новое устойчивое состояние. При выглублении рабочего органа система работает аналогично.
Блок 11 формирования сигнала блокировки рукоятки 1 управления при заглублении рабочего органа 2 работает следующим образом. Код с выхода задатчика 12 максимального рассогласования через коммутатор 24, управляемый с выхода блока 8 формирования сигнала рассогласования, поступает на второй вход сумматора 23. На
второй вход сумматора 22 поступает
в этом случае код 00...0. Так как первые входы сумматоров 22 и 23 соединены с выходами задатчика 9 положения рукоятки и датчика 3 положения рабочего органа соответственно, то на
их выходах присутствуют значения кодов и +Л1/МС,КС. При больших рассогласованиях иq выполняется условие, (4) алгоритма, на выходе элемента 25 5 сравнения появляется сигнал, который при совпадении с сигналом с второго выхода блока 8 устанавливает элемент И 27 в состояние логической единицы. Этот сигнал через элемент ИЛИ 28 ю блокирует рукоятку 1 управления.
При перемещении рабочего органа изменяется угловая координата Cf и при выполнении условия (5) алгоритма рукоятка 1 управления разблокирована. 15 При выглублении рабочего органа 2 блок 11 формирования сигнала блокировки рукоятки работает аналогично.
Блок 13 формирования времени бло- 20 кировки работает следующим образом. При появлении на выходе блока 11 сигнала -блокировки рукоятки 1 упоК
равления импульсы с выхода генератора 31 через логический элемент И 29 поступают на счетный вход счетчика 30. При появлении на выходе счетчика 30 сигнала D-триггер 32 устанавливается в состояние логического нуля, Этот сигнал, поступающий на. третьи входы 30 логических элементов 20 и 21, осуществляет выключение включенного элект- ромагнита 4 или 5. После этого управ- ление перемещением рабочего органа 2 должно осуществляться оператором с по-35 йощью кнопочных переключателей (не показаны), включающих электромагниты 4 или 5. После устранения вручную неотработанного воздействия и установления U-триггера 32 в исходноеод состояние (установочный вход триггера не показан) система начинает работать по заданному алгоритму. Если на выходе блока 11 появляется сигнал
zдо появления сигнала на выхо- 45
Выкл
де счетчика 30, то этим сигналом счетчик 30 устанавливается в исходное состояние и система продолжает работу по приведенному алгоритму.
50
Таким образом, предлагаемая система управления рабочим органом землеройной машины по сравнению с известной позволяет судить по положению рукоятки управления о действительном j-« положении рабочего органа. В результате этого повышаются точность выполняемых работ и производительность машины.
Формула изобретения
1 .Система управления рабочим органом
землеройной машины, включающая датчик положения рабочего органа, электрогид рораспределитель рабочего органа, рукоятку управления рабочего органа, отличающаяся тем, что с целью повышения производительности путем увеличения устойчивости и точности системы, она снабжена задатчико положения рукоятки, блоком формирования сигнала рассогласования, задатчиком нечувствительности, задатчиком максимального рассогласования, блоком формирования сигнала управления рабочим органом, блоком формирования сигнала блокировки рукоятки и блоком формирования времени блокировки, причем рукоятка управления рабочего органа связана с задатчиком положения рукоятки, выход которого соединен с первыми входами блока формирования сигнала рассогласования, блока формирования сигнала управления рабочим органом и блока формирования сигнала блокировки рукоятки, выход датчика положения рабочего органа соединен с вторыми входами блока формирования сигнала рассогласования, блока формирования сигнала управления рабочим органом и блока формирования сигнала блокировки рукоятки управления, первый выход блока формирования сигнала рассогласования соединен с третьими входами блока формирования сигнала управления рабочего органа и блока формирования сигнала блокировки рукоятки управления, а второй выход блока формирования сигнала рассогласования подключен к четвертым входам блока формирования сигнала управления рабочим органом и блока формирования сигнала блокировки рукоятки управления, задатчик нечувствительности , подключен к пятому входу блока формирования сигнала управления рабочим органом, выход которого подключен к электрогидрораспределителю рабочего органа, задатчик максимального рассогласования подключен к пятому входу блока формирования сигнала блокировки рукоятки управления, выход которого соединен с ручкой управления рабочего органа и через блок формирования времени блокировки - с шестым входом блока формирования сигнала управления рабочим органом.
2,Система по п. отличающаяся тем, что блок формирования сигнала управления рабочим органом содержит коммутатор, два сумматора, элемент сравнения и два элемента И, причем, соответствующие выходы коммутатора подключены к соответствующим входам сумматоров, выходы которых соединены с соответствующими входами элемента сравнения, оба выхода которого подсоединены к первым входам элементов И, вторые входы которых объединены с соответствующими входами коммутатора, при этом входы обоих сумматоров являются первым и вторым входами блока формирования сигнала управления, а входы коммутатора являются третьим, четвертым и пятым входами блока формирования сигнала управления, третьи входы элементов И объединены и являются шестым входом блока формирования сигнала управле- ния, а выходы элементов И являются выходами блока формирования сигнала управления.
3.Система по п. 1, отличающаяся тем, что блок формирования сигнала блокировки рукоятки содержит коммутатор, два сумматора, элемент сравнения, два элемента И и элемент ИЛИ, причем выходы коммутатора соединены с о дними входами сумматоров, выходы которых подключены к обоим входам элемента сравнения, оба выхода которого подключены,соответственно к первым входам обоих элементов И, вторые входы которых объединены с соответствующими входами коммутатора, а выходы элементов И соединены с обоими входами элемента ИЛИ, при этом другие входы сумматоров являются соответственно первым и вторым входами блока формирования сигнала блокировки рукоятки, третьим, четвертым и пятым входами которого являются соответствующие входы коммутатора, а выходом блока формирования сигнала блокировки рукоятки является выход элемента ИЛИ.
А. Система по п. 1, отлича ю-1 щ а я с я тем, что блок формирования времени блокировки содержит элемент И, счетчик, генератор и D-триг- гер, причем выход генератора соединен с одним входом элемента И, выход которого соединен со счетным входом счетчика, выход которого подключен к тактовому входу D-триггера, при этом другой вход элемента И и установочный вхоД счетчика объединены и являются входом блока формирования времени блокировки, выходом которого является инверсный выход D-триггера.
L L J
f ичиншпгш «JbimiM.iiiouMn -аааяыУ
П1
pfj&fv
/3 фиё.2
Составитель О.Капканец Редактор Н.Тупица Техред М.Ходанич КорректорМ. Пожо
В
15
5/
j/г-ч
SO&-1
4 S 5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления копирующим манипулятором | 1987 |
|
SU1450999A1 |
| Система автоматического управления землеройной машины | 1987 |
|
SU1509489A1 |
| Система управления рабочим органом планировочной машины | 1981 |
|
SU977621A1 |
| Устройство позиционного программ-НОгО упРАВлЕНия | 1978 |
|
SU807228A1 |
| Система автоматического управления листоформовочной машиной | 1985 |
|
SU1308499A1 |
| Устройство для регулирования температуры | 1980 |
|
SU877491A1 |
| СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ДОЗАТОРА ТОПЛИВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285140C2 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |

Изобретение относится к автоматизации управления землеройно-транспортными машинами. Цель изобретения - повышение производительности путем обеспечения устойчивости и точности системы управления. Система содержит датчик 3 положения рабочего органа (РО) 2, электрогидрораспределитель 6 и рукоятку управления (РУ) 1 РО 2. Дополнительно система снабжена задатчиками положения 9 РУ 1, нечувствительности 10 и максимального рассогласования 12, блоками формирования сигнала рассогласования 8, сигнала управления 7 РО 2 и сигнала блокировки 11 РУ 1 и блоком 13 формирования времени блокировки РУ 1. Сигнал управления РО 2 формируется в зависимости от заданной зоны нечувствительности, обусловленной зазорами в шарнирах рабочего оборудования. При этом блок 13 формирования времени блокировки РУ 1 предотвращает большие рассогласования движения РУ 1 и РО 2. Это позволяет судить по положению РУ 1 о действительном положении РО 2. В результате повышается точность выполнения работ и производительность машины. Система позволяет задавать толщину вырезаемой стружки при копании грунта, с большей точностью выполнять планировочные работы. 3 з.п.ф-лы, 2 ил.
Заказ 121
Тираж 535
ВШЖПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д„ 4/5
Подписное
| Система автоматического управления отвалом бульдозера | 1984 |
|
SU1182128A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Скловский А.А | |||
| Автоматизация дорожных машин | |||
| - Рига: АВОТС, 1980, с | |||
| Ручной прибор для загибания кромок листового металла | 1921 |
|
SU175A1 |
