Изобретение относится к рыбной промышленности, в частности к лову гидробионтов на свет рыбонасосной установкой.
Цель изобретения - повышение точности наведения.
На чертеже приведен график зависимости потерь от концентрации рыб на входе в залавливающее устройство рыбонасосной установки.
Пример. Облов неподвижного скопления. Ловят каспийскую кильку рыбонасосной установкой, состоящей из центробежного рыбонасоса с рыболовными шлангами диаметром 200 мм и длиной до 120 м, залавливающего устройства в виде патрубка с источником света, который перемещают по горизонтам лова при помощи палубного крана, установленного на промысловом судне.
При помощи гидроакустической аппаратуры определяют глубину залегания концентрации гидробионтов. Относительная погрешность эхолотов в зависимости от условий промысла составляет 5-8% и не менее 1,0-1.5 м из-за разрешающей способности по глубине эхолота, что для глубины 100 м приводит к погрешности в определении горизонта лова в 5-8 м.
Затем в судне опускают залавливающее устройство, включают источники света на залавливающем устройстве, рыбонасос и устанавливают по показаниям приборов контроля глубины лова залавливающее устройство на горизонт лова, выбранный по показаниям эхолота. Относительная погрешность приборов контроля глубины лова, например электромеханических, основанных на измерении длины вытравленного троса, при помощи которого перемещают залавливающее устройство, составляет 5-10%, что для глубины в 100 м может составить погрешность 5-Юм. Таким образом, суммарная погрешность наведения залавливающего устройства на скопление на глубине может составить 5-18% или для указанных условий 5-18 м.
Для повышения точности наведения залавливающего устройства рыбонасосной
(Л
Os
ч ю
4 СЛ
-N
установки на скопление гидробионтов измеряют разрежение во всасывающем трубопроводе рыбонасоса, на входе в залавливающее приспособление, а перемещение залавливающего устройства рыбона- сосной установки прекращают в момент фиксации изменения разрежения во всасывающем трубопроводе рыбонасоса. Для этого на всасывающем трубопроводе рыбонасоса устанавливается вакуумметр, имею щий предел измерения 100 кПа - 0 кПа и выходной электрический сигнал 0-5 мА. Точность наведения залавливающего устройства на скопление в этом случае зависит от точности фиксации рыбаком-оператором момента изменения разрежения во всасывающем трубопроводе и не зависит от глубины залегания скопления. С учетом скорости опускания залавливающего устройства, инерционности засасывания гидробионтов и реакции оператора погрешность не превысит 1:2 м для любых глубин лова.
Мерительный эффект - изменение разрежения во всасывающем трубопроводе связан с возникновением потерь напора при входе водорыбной смеси из безграничного пространства в приемный патрубок залавливающего устройства.
При стационарном процессе засасывания на входе водорыбной смеси из безграничного пространства в трубопровод с острыми кромками коэффициент местного сопротивления существенно зависит только от расходной объемной концентрации гидросмеси.
С учетом экспериментальных данных рассчитывают зависимость потерь напора от объемной концентрации рыб на входе в
залавливающее устройство для случая лова каспийской кильки рыбонасосом, диаметр всасывающего патрубка которого 0,2 м, производительность по воде 400 м3/ч. По опытным данным для реальных условий постоянная составляющая потерь напора составляет 0,3 м вод.ст. (3 кПа), а чувствительность способа измерения - 0,01 м вод.ст. на 1% изменения концентрации |- 10 кильки (0,1 кПа на 1% изменения концентрации).
По данным наблюдения за ловом каспийской кильки рыбонасосами ее поступление в залавливающее устройство носит
15 пульсирующий характер, когда при средней за цикл лова концентрации рыб менее 1% ее амплитудное значение в момент входа залавливающего устройства в плотные слои искусственно созданных скоплений, имею20 щих промысловое значение, достигает 5- 10% и выше. При объемной концентрации рыб на входе в залавливающее устройство 10% изменение разрежения во всасывающем трубопроводе составляет 0,1 м вод.ст,
25 (1 кПа), что можно измерить при помощи приборов, например вакуумметров. Формула изобретения Способ наведения залавливающего устройства рыбонасосной установки на
30 скопление гидробионтов, включающий образование в зоне действия залавливающего устройства гидродинамического поля, перемещение и остановку залавливающего устройства, отличающийся тем, что, с
35 целью повышения точности наведения, измеряют величину разрежения на входе в залавливающее приспособление, а перемещение последнего прекращают при изменении величины разрежения.
40
25 К, %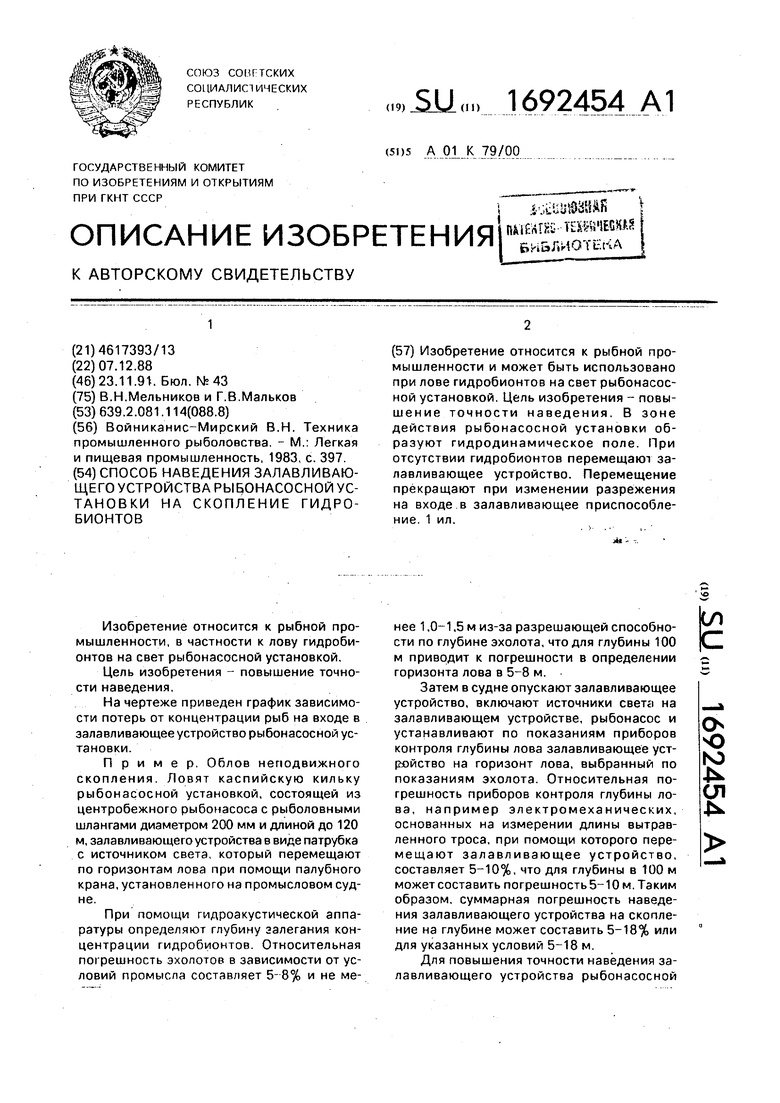

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ лова гидробионтов | 1989 |
|
SU1746972A1 |
| Способ лова гидробионтов рыбонасосной установкой | 1990 |
|
SU1784155A1 |
| Способ лова гидробионтов | 1988 |
|
SU1792603A1 |
| СПОСОБ ЛОВА КОНУСНЫМ ПОДХВАТОМ | 1989 |
|
RU2032340C1 |
| Способ лова гидробионтов | 1986 |
|
SU1463200A1 |
| СПОСОБ ЛОВА РЫБЫ | 2006 |
|
RU2325804C2 |
| Конусный подхват | 1989 |
|
SU1792604A1 |
| Способ регулирования световых полей у залавливающего устройства рыбонасоса | 1988 |
|
SU1576106A1 |
| Устройство для лова рыбы | 1990 |
|
SU1750536A1 |
| РЫБОНАСОСНАЯ УСТАНОВКА | 1994 |
|
RU2084145C1 |

Изобретение относится к рыбной промышленности и может быть использовано при лове гидробионтов на свет рыбонасос- ной установкой. Цель изобретения - повы- шение точности наведения. В зоне действия рыбонасосной установки образуют гидродинамическое поле. При отсутствии гидробионтов перемещают залавливающее устройство. Перемещение прекращают при изменении разрежения на входе в залавливающее приспособление. 1 ил.
| Войниканис-Мирский В,Н | |||
| Техника промышленного рыболовства | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ДЛЯ РАДИОСНОШЕНИЙ С ПОЕЗДАМИ | 1922 |
|
SU397A1 |
