Изобретение относится к автотракторной технике, в частности к устройствам для регулирования давления воздуха в шинах колесных машин.
Цель изобретения - повышение тягово- сцепных качеств и проходимости путем оптимизации давления в шинах по критерию минимума энергозатрат на движение.
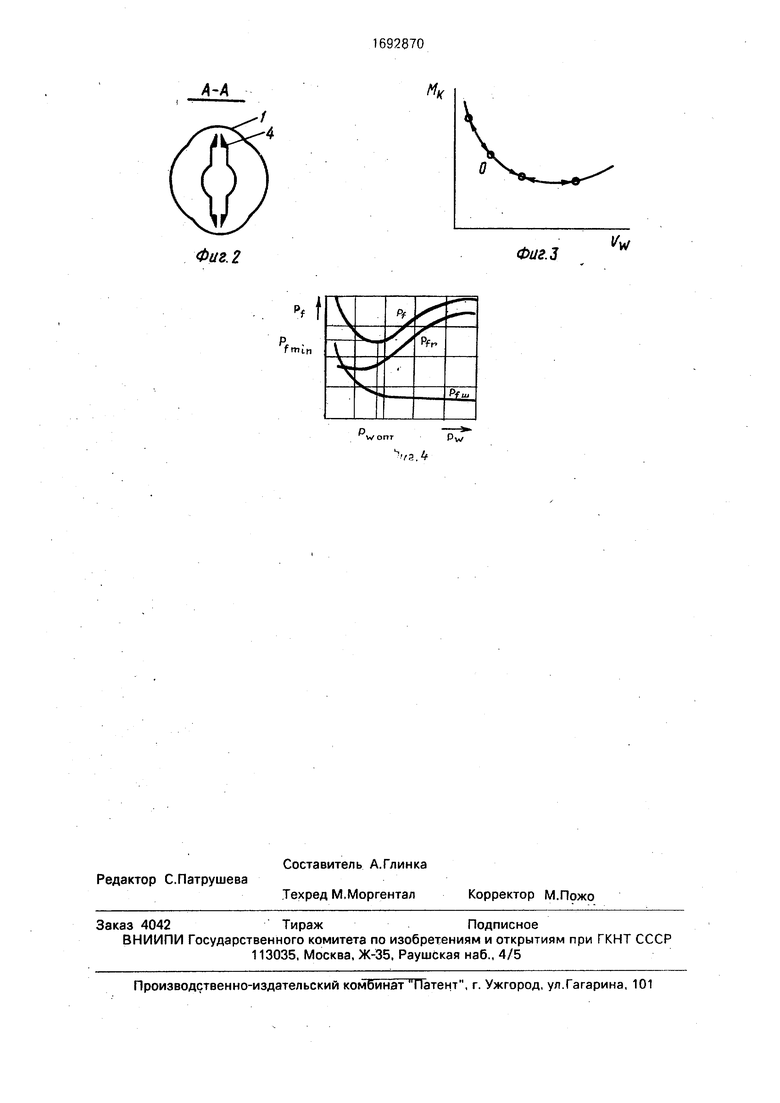
На фиг. 1 изображена принципиальная схема предлагаемого устройства; на фиг.2 - управляемое пневмосопротивление ыпол- няющее функцию датчика крутящего момента, вид в плане; на фиг.З - график поиска минимума энергозатрат; на фиг.4 - график зависимости силы сопротивления движению Pf от давления воздуха PW.
Устройство содержит управляемое пневмосопротивление, состоящее из заслонок 1, установленных на втулке 2 ведущей шестерни главной передачи 3. сопел 4, установленных на торсионном вале 5 вместе с пневмопереходником 6, имеющим вход 6.1 и выход 6.2 пневмопереходника 6, через выход 6.2, пневмопроводы 7 и 8 и сумматор 9 соединена с непрерывно-дискретным элементом 10, имеющим первый вход 10.1, выход 10.2 и второй вход 10.3,
Непрерывно-дискретный элемент 10 включает в себя нормально закрытый клапан 11, открываемый при воздействии через вход 10.3 на мембрану 12 дискретного сигнала от пневматического генератора импульсов, состоящего из трехмембранного реле 13, пневмоемкости 14 и пневмосопро- тивления 15, охваченных через пневмопровод 16 обратной связью.
Через выход 10.2 и пневмопровод 17 непрерывно-дискретный элемент 10 соединен с первым входом элемента 18 запоминания-сравнения, имеющего первый вход
18.1. выходы 18.2, 18.3, 18.4, 18.5 и входы 18.6 и 18.7 и состоящего из трехмембранно- го реле с подвижным мембранным блоком 19 и пневмосопротивления 20.
Выходы 18.2 и 18.3 элемента запомина- ния-сравнения с помощью пневмопривода 21 соединены с входом управляющей камеры пневмомеханического триггера 22, содержащего мембранный блок 23, храповой механизм 24 и шток 25, воздействующий через пружину 26 на мембранный блок 27 и через пружину 28 на клапан двухпозицион- ного трехлинейного пневмораспределителя 29, имеющего вход 29.1, выход 29.2 и вход- выход 29.3 и сообщающего выход-вход 30.1 двухпозиционного пневмораспределителя 30через вход-выход29.3 и пневмопроводЗ либо через выход 29.2 с атмосферой, либо через вход 29,1 и пневмопровод 32 с источником 33 давления.-
Выход-вход 30.2 пневмораспределителя 30 соединен с помощью пневмопровода 34 с полостью шин 35, а полость над мембранным блоком 36, управляющим нормально закрытым клапаном 37, через вход 30.3 и пневмопровод 38 сообщается с выходом сумматора 9.
Питание устройства осуществляется от источника 33 давления через стабилизатор 39 и пневмопроводы 40 и 41.
Логика поиска минимума энергозатрат, заложенная в алгоритм действия устройства, заключается в следующем (фиг.З). Из источника 0, соответствующей определенным значениям крутящего момента и давления в шинах, устройство делает шаг вправо и влево.
Команду на пробный шаг устройства в ту или иную сторону дает триггер 22, имеющий два устойчивых состояния, обеспечива- ющих соединение полости шин либо с атмосферой, либо с источником питания. Поэтому первоначальное устойчивое состояние триггера и обеспечивает направление пробного шага. Длительность шага опре- деляется периодом колебаний прямоугольных импульсов, формируемых на выходе непрерывно-дискретного устройства и имеющих амплитуду, адекватную.действующему крутящему моменту.
Для пояснения алгоритма работы устройства используется график функциональной зависимости Мк fPw, изображенной на фиг.З и адекватно отражающей известную зависимость Pf fPw, поскольку Mk Pf rk.
Как следует из графика (фиг.4) зависимость Pf f(Pw) носит экстремальный характер (имеется явный минимум энергозатрат), обусловленный противоположными влияниями давления Pw в шинах
на составляющие суммарного сопротивления: потери на колееобразование Pfr имеют прямую зависимость от Pw, а потери на гистерезис в шине Pfyj имеют обратную зависи мость от PW
Физическая сущность поиска оптимального давления, обеспечивающего минимум энергозатрат, аналогична поведению шарика на вогнутой поверхности - где бы его не поместили, он стремится скатиться вниз - в точку с наименьшим запасом потенциальной энергии.
Теперь о процессе поиска оптимального давления.
Команду на направление пробного шага дает триггер, при этом не имеет значения ни местонахождение начальной точки на кривой Mk f(Pw), ни направление изменения давления. В случае совпадения направления шага, заданного триггером, с уменьшением Мк (шарик скатывается к точке перегиба) следующий шаг, заданный не- прерывно-дискретн ым устройством, делается в этом же направлении. Этот процесс протекает до тех пор, пока устройство не перешагнет точку экстремума (шарик проскочил точку перегиба и по инерции начал подниматься вверх). Как только это произойдет, устройство осуществляет реверс - изменяет направление истечения воздуха на обратное Команду триггеру на этот реверс дает устройство 18 запоминания-сравнения установившее, что амплитуда последующего импульса больше амплитуды предыдущего. Теперь устройство начинает рыскать около точки экстремума (шарик совершает колебания с одной восходящей ветви кривой на другую), поддерживая оптимальное давление воздуха.
Работа устройства на разных фонах.
Обратимся опять к графику Pf f(Pw), из которого следует, что при качении колеса по недеформируемой опорной поверхности имеет место только сопротивление качению бт гистерезиса в шине, графически описываемое кривой Pfuj f(Pw) и достигающее минимума при максимально допустимом давлении в шине.
При качении жесткого колеса по деформируемому основанию имеют место только потери на колееобразование, графически описываемые кривой Pfr f(Pw) и достигающие минимума при минимально-допустимом давлении.
Минимально и максимально допустимые давления в шине ограничиваются трехлинейным пневмораспределителем 29 за счет подбора упругости пружины 26, установленной между штоком 25 триггера и мембранным блоком 27.
Для всех же случаев качения эластичного (упругого) колеса по деформируемому основанию экстремальный характер кривой Pf - f(Pw) неизменен, только точка экстремума в соответствии с изменением несущей спо- 5 собности опорной поверхности перемещается в ту или иную сторону вдоль оси Pw с одновременным дрейфом вдоль оси Pf (изменение абсолютной величины Pf). Поэтому задача поиска оптимального давления на 10 всех типах опорной поверхности решается однозначно согласно указанного алгоритма.
При изменении режимов движения изменяются вертикальная нагрузка на веду- 15 щий мости абсолютная величина крутящего момента, функционально не связанные с давлением воздуха в шинах. Экстремальный же характер кривой Pf f(Pw) не изменяется, она просто как бы дрейфует 20 относительно осей Pf и Pw.
Поэтому работа устройства и в этом случае опять же протекает по изложенному алгоритму. Увеличение нагрузки на шину вызывает дополнительную деформацию 25 шины на рост потерь на гистерезис, то есть уход параметра Pf из зоны экстремума, а раз так, то устройство возвращает систему в зону экстремума, делая шаг в сторону увеличения давления, что предохраняет шины 30 от езды с давлением, не соответствующим нагрузке.
Устройство работает следующим образом.
Крутящий момент закручивает торсион- 35 ный вал 5, вызывая угловое смещение установленного на нем пневмопереходника 6 с соплами 4 относительно заслонок 1, т.е. - изменение пневмосопротивления сопло 4 - заслонка 1 (фиг.2), формируя тем самым в 40 полости пневмопереходника 6 результирующее давление, являющееся мерой крутящего момента.
Непрерывный пневматический сигнал ерез выход 6.2 по пневмопроводам 7 и 8 45 поступает на вход 10.1 непрерывно-дискретного элемента 10,
Циклическое изменение соотношения давлений в камерах В и Б реле 13 за счет включения в обратную связь 16 реле апери- 50 одического звена, состоящего из пневмоем- кости 14 и пневмосопротивления 15, давление на вход которых поступает с выхода реле 13,-и связанное с этим перемещение мембранного блока приводит к возникнове- 55 нию в пневмоприводе 16 и, следовательно, в полости В преобразователя 10 пневматических импульсов, воздействующих на мембрану 12 и клапан 11. В результате периодического открытия и закрытия клапана на выходе 10.2 непрерывно-дискретного элемента формируются прямоугольные импульсы, поступающие с интервалом, равным одному периоду колебаний генератора, через пневмопривод 17 и вход 18.1 в камеру Б элемента 18 запоминания-сравнения, а затем, пройдя через выход 18 4, пневмосоп- ротивление 20 и вход 18.6, запоминаются в камере В.
Каждый последующий импульс, поступающий в камеру Б в конце шага устройства, сравнивается с запомненным в камере В предыдущим импульсом. Если последующий импульс меньше предыдущего, то мембранный блок 19 перемещается вверх и сообщает выход 18.5 реле 18 с атмосферой -управляющий сигнал на выходе 18.3, пневмопроводе 21 и на входе триггера 22 не возникает и устройство делает еще один шаг в том же направлении, т.е. сохраняется предшествующее направление истечения воздуха через распределитель 29 Если же поступающий импульс больше предыдущего, то мембранный блок 19 перемещается вниз, сообщает выход 18.2 с входом 18.7 а, значит, и с линией 40 питания, формируя тем самым управляющий дискретный сигнал, который поступает в камеру А пневмо- химического триггера 22, что вызывает перемещение мембраны 23, срабатывание храпового механизма 24 и через шток 25, пружину 26 переход мембранного блока 27 в новое устойчивое состояние, т.е. реверс пневмораспределителя 29, и, следовательно, изменение направления истечения воздуха через пневмолинии распределителя. Истечение воздуха в этом направлении происходит до появления нового управляющего сигнала на входе триггера 22 или до достижения нижнего или верхнего пределов допустимого давления воздуха в шинах. В последнем случае усилия пружины 26 (или пружины 26 и пружины 28 клапана) уравновешиваются давлением на мембранный блок 27 со стороны камеры Б распределителя, и камера Б, соединенная с полостью шин, отключается соответственно от атмос- ферного выхода 29.2 (или от входа 29.1 линии питания).
Пневмораспределитель 30 сообщает полость шин 35 через пневмопроводы 34 и 31 и Пневмораспределитель 29 с атмосферой или с источником давления только во время движения транспортного средства, когда пневматический сигнал от датчика крутящего момента (выход 6.2) передается по пневмопроводам 7,8 и 38 на вход 30.3 и в камеру А пневмораспределителя 30, приводя тем самым (с перемещению мембранного блока 36 вниз и открытию клапана 37.
При наличии у транспортного средства двух и более ведущих мостов для суммирования пневматических сигналов датчиков крутящего момента в устройстве вводится в действие аналоговое пневматическое суммирующее устройство 9. В остальном устройство для регулирования давления работает аналогично описанному. Формула изобртетения Устройство для регулирования давления воздуха в шинах транспортного средства, содержащее источник сжатого воздуха, связанный трубопроводом с регулятором давления, имеющим датчики крутящего момента, выходы которых соединены с входом сумматора, и двухпозиционные пневморас- пределители, один из которых выполнен двухлинейным и имеет выход, связанный трубопроводом с полостью шин, отличающееся тем, что, с целью повышения тягово-сцепных качеств и проходимости путем оптимизации давления в шинах по критерию минимума энергозатрат на
движение, регулятор давления выполнен по пневмомеханической схеме и содержит пневмомеханический генератор импульсов, непрерывно-дискретный, запоминающий и
сравнивающие пневматические элементы, механо-пневматический преобразователь крутящего момента типа сопло - заслонка и пневматический триггер со счетным входом, а второй пневмораспределитель выполнен
трехлинейным, при этом выход сумматора подключен к входу непрерывно-дискретного элемента, другой вход которого связан с выходом генератора импульсов, а выход подключен к входу элемента запоминаниясравнения, два выхода которого в свою очередь подключены к входу триггера, управляющего трехлинейным пневморасп- ределителем, вход которого соединен с источником давления, первый выход соединен
с атмосферой, а второй - с входом двухлинейного пневмораспределителя, управляющий вход которого связан с первым входом непрерывно-дискретного элемента.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической накачки шины | 1985 |
|
SU1237472A1 |
| Пневматический весовой дозатор | 1988 |
|
SU1610304A1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |
| Гидростатический уровнемер | 1984 |
|
SU1186953A2 |
| Пневматическая сеялка для дозирования сыпучих материалов | 1981 |
|
SU1034631A1 |
| ВЫСЕВАЮЩИЙ АППАРАТ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 2016 |
|
RU2624968C1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕЛ\А АВТОМАТИЧЕСКОГОУПРАВЛЕНИЯ, ВЫЧИСЛЕНИЯ, | 1961 |
|
SU141684A1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
| Импульсный автоматический дозатор жидкости | 1984 |
|
SU1210065A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АРТЕРИАЛЬНОГО ДАВЛЕНИЯ | 1999 |
|
RU2159073C1 |
Изобретение относится к автотракторной технике, в частности к устройствам для регулирования давления воздуха в шинах колесных машин Цель изобретения - повышение тягово-сцепных качеств и проходимости путем оптимизации давления в шинах по критерию минимума энергозатрат на движение, Устройство содержит регулятор давления, состоящий из пневмопереходни- ка 6, непрерывно-дискретного 10, запоминающего 18 и сравнивающего 19 пневматических элементов, пневмомеханического триггера 22 со счетным входом и пневмораспределителей 29 и 30, соединяющих шины либо с источником 33 сжатого воздуха, либо с атмосферой. При этом сравнивающий пневматический элемент 19, вы- пол нен в виде подвижного мембра н ного блока. Работа устройства заключается в непрерывном пошаговом реверсивном изменении давления до достижения величины, обеспечивающей минимум энергозатрат 4 ил.
Y/;
ft/.
о#
31
37
Фиг. 2
Составитель А.Глинка
Редактор С.Патрушева
Техред М.Моргентал
Ми
Фиг.З
V
wontPW
sv.4
Корректор М.Пожо
| Сельскохозяйственный агрегат | 1986 |
|
SU1461381A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
