аппарата сигнал равен нулю, т.е. Рвх4 Рвых4 . Тогда давление, пропорциональное количеству жидкости для увлажнения предварительной дозы корма, от маломощного задат- чика 89 подается в первую управляющую камеру элемента 84 сравнения. 1 з.п. ф-лы, 3 ил.



| название | год | авторы | номер документа |
|---|---|---|---|
| Индивидуальный дозатор корма | 1988 |
|
SU1590059A1 |
| Индивидуальный дозатор корма в зависимости от величины надоя | 1985 |
|
SU1416090A1 |
| Устройство для управления доильным аппаратом | 1988 |
|
SU1655391A1 |
| Устройство для управления доильным аппаратом | 1989 |
|
SU1811779A1 |
| Устройство для управления доильным аппаратом | 1981 |
|
SU1186166A1 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| Устройство для управления доильным аппаратом | 1980 |
|
SU927204A1 |
| Пневматический весовой дозатор | 1988 |
|
SU1610304A1 |
| Устройство для управления весовым многокомпонентным дозатором | 1978 |
|
SU744489A1 |
| Преобразователь интенсивности потока молока | 1989 |
|
SU1702982A1 |

Изобретение относится к сельскому хозяйству, а именно к устройствам кормораз- дачи. Цель изобретения - оптимизация индивидуального дозированного кормления животных. Устройство включает блок увлажнения корма, задатчики давления 79 и 80, элемент И 86, два элемента сравнения 83, 84, элемент НЕ 81, триггер 82, регулируемое пневмосопротивление 85, два пневмоклапа- на 75, 76, два реле 77, 78 с одной управляю о я Л,sl 9 р « 8l Фиг.З 1F и . О щей камерой, элемент ЕСЛИ-ТО 87, нерегулируемое пневмосопротивление 88 и маломощный задатчик 89. При подаче входного сигнала PBXI , соответствующего началу разгрузки бункера дозатора, переключается триггер 82, выход которого связан с входами реле 77 и 78 с одной управляющей камерой, элементов НЕ и И 81 и 86 и пневмоклапана 76. Их срабатывание приводит к транспортировке жидкости от накопи- тельной емкости 71 до струйных распылителей, куда одновременно подается воздух от мощного задатчика 79 через открытое сопло реле 78 с одной управляющей камерой. При входном сигнале Рвхз и Рвх4 давление во вторую управляющую камеру элемента 84 сравнения подается от мощного задатчика 80 управления через регулируемое пневмосопротивление 85 и открытое сопло элемента И 86. Срабатывание элемента И 86 приводит к сообщению второй управляющей камеры элемента 84 срав- нения с атмосферой. Увлажнение предварительной дозы корма происходит при выключенном доильном аппарате, когда на выходе элемента ЗАПРЕТ доильного СЛ С VI VI СЛ со
Изобретение относится к сельскому хозяйству, а именно к устройствам кормораз- дачи.
Цель изобретения - оптимизация индивидуального дозированного кормления животных.
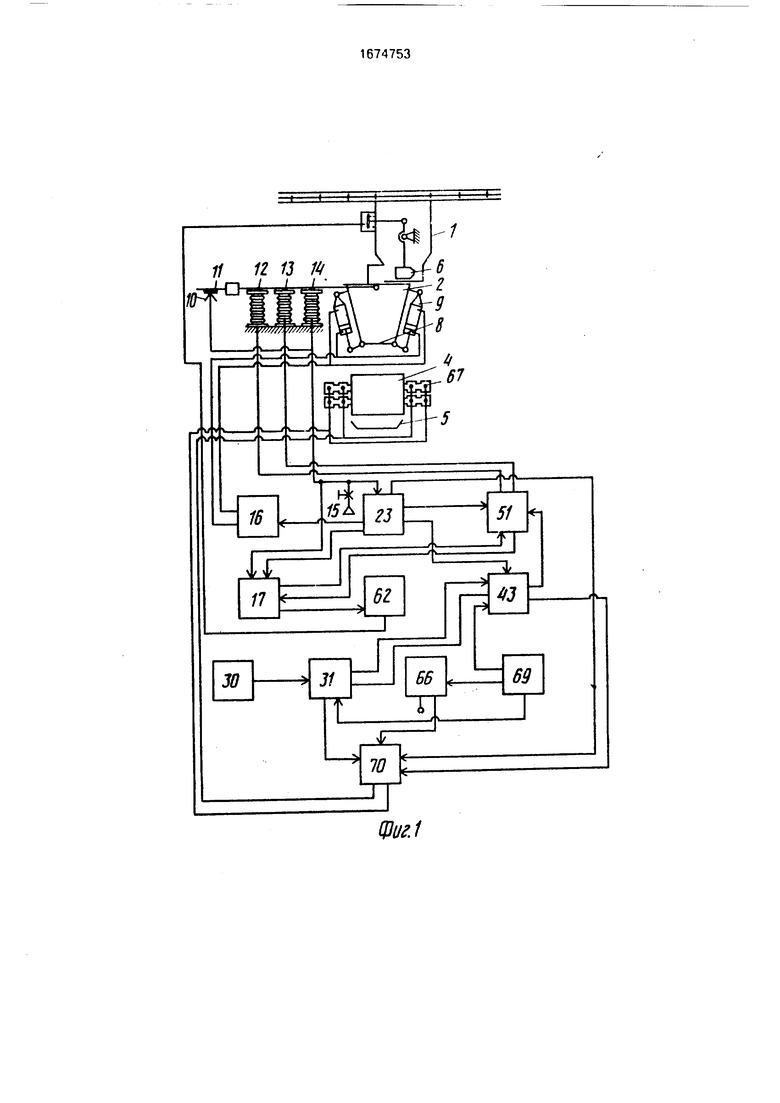
На фиг. 1 представлена блок-схема устройства; на фиг.2 - принципиальная схема устройства для дозирования корма с сигналами PBXI . от преобразователя
регистрации появления коровы, Рвхаот преобразователя интенсивности потока молока автоматизированного манипулятора для механического доения коров и РВЫХБ к генератору импульсов доильного аппарата; на фиг.З - принципиальная схема увлажнителя корма с сигналами PBXI PBHXI от триггера пневматического реле времени разгрузки бункера дозатора, РВх2 Рвых2 от измерительной емкости счетчика количества выдоенного молока, РВхз Рвыхз от регулируемого сопротивления пневматического реле времени определения надоя молока, РВх4 Реых4 от выхода элемента ЗАПРЕТ доильного аппарата.
Он включает устройство для дозирования корма с бункером-накопителем 1, установленный над бункером 2 дозатора 3, увлажнитель 4, кормушку 5. В бункере-накопителе 1 размещено устройство для транспортировки корма с молотковым рабочим органом 6, соединенным с мембранным исполнительным механизмом 7. На бункере 2 дозатора 3 крепятся два люка 8, соединенные с пневмоцилиндрами 9.
Дозатор 3 представляет собой весоизмерительное устройство с соплом 10, заслонкой 11 и сильфонами 12 - 14 обратной связи, малой и большой доз корма. Сопло 10 подключено к регулируемому пневмосопро- тивлению 15.
Система управления манипулятора состоит из воздухораспределителя 16, блока 17 коммутации с элементами 18 и 19 сравнения и ДА, триггером 20, маломощным за- датчиком 21 и пневмокнопкой 22, пневматического реле 23 времени разгрузки бункера с триггером 24, регулируемым пневмосопротчвлончег 25. элементами 26 и 27 сравнения и двумя усипигелями 28 и
29, счетчика количества выдоенного молока со струйными пневматическими преобразователями 30 и измерителем 31 темпа нарастания сигнала в зависимости от количества
выдоенного молока с двумя реле 32 и 33, включенными по схеме сравнения сигналов, шестью пневмоклапанами 34 - 39, а также с двумя дозирующими и одной измерительной емкостями 40 - 42, пневматического
реле 43 времени определения надоя молока с регулируемым пневмосопротивлением 44, пневмоклапанами 45 - 48. триггером 49 и элементом 50 НЕ, классификатора 51 сигналов с двумя элементами 52 и 53 сравнения, маломощными задатчиками 54 и 55, каждый из которых включает нерегулируемое пневмосопротигление, триггерами 56 и 57, усилителем 58, элементами 59 и 60 ЕС- ЛИ-ТО и элементом 61 ЗАПРЕТ, генератора
62 импульсов с регулируемым пневмосопротивлением 63, емкостью 64 и элементами 65 и 66 ДА и НЕ. струйных распылителей 67 жидкости, пневмотумблера 68 ПУСК и элемента 69 ЗАПРЕТ доильного аппарата. Блок
70 управления распылителями увлажнителя 4 корма включает накопительную емкость 71. преобразователь уровня жидкости с поплавком 72, соплом 73 и регулируемым пневмосопротивлением 74,пневмоклапанами
75 и 76. реле 77 и 78 с одной управляющей камерой, мощные задатчики 79 и 80 управления, элемент 81 НЕ, триггер 82, элементы 83 и 84 сравнения, регулируемое пневмо- сопротивление 85, элемент 86 И и элемент
87 ЕСЛИ-ТО, нерегулируемое пневмосоп- ротивление 88 и маломощный задатчик 89 с нерегулируемым пневмосопротивлением.
Индивидуальный дозатор-увлажнитель
работает следующим образом.
Для перемещения корма используется транспортер, выполненный из троса и шайб, который загружает бункер-накопитель 1 концентрированным кормом. Затем молотковый рабочий орган 6 при возвратно-вращательном движении подсыпает корм порциями в бункер 2 дозатора 3. После набора дозы корма по команде от дозатора 3, выполненного в виде пневматического весоизмерительного механизма, пневмоци- линдры 9 открывают люки 8 и корм под
действием силы тяжести подается через увлажнитель 4 в кормушку 5. Привод молоткового рабочего органа 6 осуществляется через мембранный исполнительный механизм 7 одностороннего действия, в управляющей камере которого происходит чередование единичного и нулевого сигналов.
С впуском коровы в станок осуществляется выдача предварительной дозы корма, для чего оператор нажимает на пневмок- нопку 22 блока 17 коммутации при ручном дублировании процесса. Переключается триггер 20, с выхода которого сигнал подается через нормально открытый контакт элемента 52 сравнения на вход усилителя 58. Усиленный по мощности сигнал включает триггер 57, выход которого связан с элементом 18 сравнения. Далее сигнал проходит через открытое сопло элемента 18 сравнения в управляющую камеру элемента 19 ДА, выход которого соединен с входом генератора 62 импульсов. С появлением единичного сигнала включается в работу генератор 62 импульсов, формирующий дискретные сигналы для подачи в управляющую камеру мембранного исполнительного механизмов 7. 8 зависимости от расстояния между генератором 62 импульсов и мембранным исполнительным механизмом 7 время передачи сигнала можно уменьшить усилением его по мощности в усилителе. Частоту колебаний сигналов можно регулировать при помощи регулируемого пневмосопротивления 63 и емкости 64. Мембранный исполнительный механизм 7 приводит в действие молотковый рабочий орган 6, который транспортирует материал из бункера накопителя 1 в бункер 2 дозатора 3. Одновременно колебательное движение молоткового рабочего органа 6 направлено на предотвращение образования уплотнения корма на дне бункера-накопителя 1. Время транспортировки корма до бункера 2 дозатора 3 определяется производительностью МОЛОТКОРОГО рабочего органа 6 и величиной заданной дозы корма. После набора в бункере 2 требуемой дозы корма на выходе сопла 10 дозатора 3 формируется единичный сигнал, переключающий элемент 18 сравнения блока 17 коммутации, на выходе которого устанавливается нулевой сигнал. Одновременно на выходе элемента 19 ДА появляется О, отключающий генератор 62 импульсов. Молотковый рабочий орган 6 прекращает подачу корма в бункер 2 дозатора 3, Одновременно с элементом 18 сравнения блока 17 коммутации переключается элемент 26 сравнения пневматического реле 23 времени разгрузки бункера 2, единичный сигнал включает триггер 24, выход которси о связям с регулируемым пневмосопртивлением 25. При превышении давления в упраоляющей камере переключается элемент 27 сравнения. Величина давления подпора элементов 27 и 53 сравнения должна быть одинаковой и равной 0,008 - 0.01 Villa. Сигнал на выходе элемента 27 сравнения уси0 ливается в усилителе 28 и подается в воздухораспределитель 16и гшевмоклапэн 46. Воздухораспределитель 16, выходные штуцера которого подключены к рабочим камерам пневмоцилиндров 9, формирует
5 командный сигнал на раскрытие люков 8. Корм под действием силы тяжести выгружается через увлажнитель 4 в кормушку 5. Время выгрузки бункера 2 дозатора 3 определяется временем переключения триггера
0 24 в исходное положение, определяемое расходной характеристикой регулируемого пневмосопротивления 25 и суммарной емкостью коммутационных каналов и управляющей камеры элемента 24. Пнеомоклапаи
5 46, выход которого соединен с атмосферой, а управляющая камера - с выходом триггера 24. предотвращает повторное составление дозы корма после истечения времени определения надоя молока. Он связывает с ат0 мосферой управляющие камеры элементов 52 и 53 сравнения классификатора 51 сигналов.
Для подготовки системы управления к последующей выдаче корма триггер 20 бло5 ка 17 коммутации возвращается в исходное положение по команде выходного сигнала триггера 24 пневматического реле 23 разгрузки бункера 2.
После выдачи предварительной дозы
0 корма и надевания доильных стаканов на соски вымени, включается пневмотумблер 68 ПУСК доильного аппарата, сигнал на выходе которого подается в элемент 69 ЗАПРЕТ и пневмоклапан 48. Выход элемента
5 69 ЗАПРЕТ связан с управляющей камерой пневмоклапана 48 и триггера 49. С момента переключения последнего давление воздуха подается в управляющую камеру пнев- моклапанов 47 и 37 пневматического реле
0 43 времени определения надоя молока и измерителя 31 темпа нарастания сигнала в зависимости от количества выдоенного молока. При поступлении единичного сигнала в управляющую камеру пневмоклапана 47
5 происходит переключение его и разобщеннее атмосферой управляющих, камер пнев- моклапанов 36 и 45, т.е. происходит подготовка схемы для измерения темпа нарастания сигнала в зависимости от количества выдоенного молока.
В свою очередь единичный сигнал в управляющей камере переключает пневмок- лапан 48, соединенный с регулируемым пневмосопротивлением 44. Последний предназначен для ручного задания времени определения надоя молока изменением расхода воздуха в управляющие камеры пневмоклапанов 36 и 45. Первый из них разобщает измерительную емкость 42 с выходами пневмоклапанов 34 и 35. что пред- отвращает дальнейшее накопление давления в измерительной емкости 42 после истечения времени определения надоя молока. Второй пневмоклапан 45 сообщает измерительную емкость 42 с управляющими камерами элементов 52 и 53 сравнения. С включением в работу доильного аппарата начинается процесс выжимания молока из сосков, интенсивность которого фиксируется ковшовым счетчиком молока со струйными пневматическими преобразователями 30, выходные сигналы которых переключают попеременно реле 32 и 33, подсоединенные к пневмоклапанам 34, 35, 38 и 39.
При наличии сигнала сопла пневмоклапанов 34 и 35 закрываются, а сопла пневмоклапанов 38 и 39 открываются. Происходит поочередное наполнение дозирующих емкостей 40 и 41 воздухом до давления питания. При отсутствии сигнала сопла пневмоклапанов 34 и 35 открыты, а сопла пневмоклапанов 38 и 39 закрыты. Это положение соответствует разряду дозирующих емкостей 40 и 41, при котором происходит перераспределение давлений между ними и измерительной емкостью 42. Таким образом в измерительной емкости 42 давление нарастает пропорционально количеству выдоенного молока. После истечения времени определения надоя молока, задаваемого регулируемым пневмосопротивлением 44, сопло а пневмоклапана 45 открывается. Дальнейшее накапливание давления в измерительной емкости 42 прекращается. В свою очередь, давление из измерительной емкости 42 через закрытое сопло пневмоклапана 45 подается в управляющие камеры элементов 52 и 53 сравнения классификатора 51 сигналов. Причем элемент 53 сравнения определяет малую, а элемент 52 сравнения большую дозу корма, что достигается различной величиной давления подпоров. При поступлении меньшего сигнала, чем давление подпора в элементе 52 сравнения, срабатывает элемент 53 сравнения, сигнал усиливается в усилителе 58 и включает триггер 57, выход которого связан с элементом 18 сравнения. Далее переключается элемент 19 ДА и единичный сигнал поступает в генератор 62 импульсов, который приводит в действие мембранный исполнительный механизм 7 молоткового рабочего органа 6. Начинается процесс загрузки в бункер 2 дозы корма в
зависимости от удоя. Одновременно после триггера 57 переключается элемент 60 ЕС- ЛИ-ТО, выход которого связан с элементом 61 ЗАПРЕТ. Затем сигнал подается в силь- фон 13 малой дозы корма, в котором уста0 навливается давление, пропорциональное входному сигналу дозатора 3. а в сильфоне 14 большой дозы корма - атмосферное давление.
В случае накопления в измерительной
5 емкости 42 давления, соответствующего большей дозе корма, одновременно переключаются элементы 52 и 53 сравнения. Несмотря на одновременность срабатывания, пневматический сигнал от классификатора
0 51 сигналов подается лишь в сильфон большой дозы корма, так как сигнал на выходе триггера 56 после переключения элемента 61 ЗАПРЕТ соединяет с атмосферой сильфон 13 малой дозы корма.
5 Загрузка корма будет производиться как при выдаче малой, так и большой доз корма, т.е. в обоих случаях срабатывает элемент 53 сравнения и, как уже описывалось выше, произойдет подача сигнала о блок 17
0 коммутации, затем в генератор 62 импульсов и на мембранный исполнительный механизм 7.
Триггеры 56 и 57 предназначены для запоминания сигналов на выходе элементов
5 52 и 53 сравнений в случае снижения давления в измерительной емкости 42 при сообщении ее с сильфонами 13 и 14 малой и большой доз корма
После набора дозы корма в бункере 2
0 дозатора 3 переключаются элементы 18 и 26 сравнения блока 17 коммутации и пневматического реле.23 времени, которые формируют командные сигналы на разгрузку бункера 2.
5 В конце процесса разгрузки на выходе усилителя 23 устанавливается нулевой сигнал, переключающий воздухораспределитель 16, который связывает магистраль питания с рабочей камерой, расположенной
0 с противоположной стороны штока пневмо- цилиндров 9. Люки 8 бункера 2 закрываются для составления дозы корма следующей коровы.
Пнезмоклапан 48 в случае необходимо5 сти повторного включения пневмотумблера 68 ПУСК доильного аппарата позволяет запомнить время от начала доения, а затем при дальнейшем доении продолжить считывание до наступления времени определения надоя молока после кратковременной
паузы. Схема запоминания первоначального давления, пропорционального времени до наступления паузы, в пневматическом реле 43 времени определения надоя молока исключает повторный отсчет его от нуля и тем самым обеспечивает требуемую технологическую погрешность манипулятора, при этом на выходе триггера 49 сохраняется единичный сигнал, который предотвращает сообщение управляющих камер пнсвмокла- панов 45 и 36 с атмосферой.
В конце процесса доения после освобождения коровой с,ганка подастся сигнал PBXI 0 от преобразователя регистрации появления коровы. Элемент 50 НЕ переключается и единичный сигнал переводит триггер 49 в исходное положение для подготовки схемы к следующему циклу дозирования корма. В свою очередь, нулевой сигнал на выходе элемента 69 ЗАПРЕТ доильного аппарата переключает пнепмоклапан 48, что исключает подачу давления воздуха на вход регулируемого сопротивления 14,
При подаче входного сигнала PDxi,соответствующего началу разгрузки бункера 2 дозатора, переключается триггер 82, выход которого связан с входом реле 77 и 78 с одной управляющей камерой, элементов 81 и 86 НЕ, И и пневмоклапана 76. Их срабатывание приводит к транспортировке жидкости от накопительной емкости 71 до струйных распылителей 67, куда одновременно подается воздух от мощного задатчика 79 управления через открытое сопло реле 78 с одной управляющей камерой.
Время увлажнения корма зависит от величины давления в измерительной емкости 42 счетчика количество выдоенного молока, соединенного с первой управляющей камерой элемента 84 сравнения через открытые сопла элемента 83 сравнения и элемента 87. В этом случае входной сигнал Рвхз О а РИМ 1Давление во вторую управляющую камеру элемента 84 сравнения подается от мощного задатчика 80 управления через регулируемое пневмосопрогивление 85 и открытое сопло элемента 8G И. Время перетекания воздуха до давания, превышающего давление в перзой управляющей камере элемента 84 сражении, равно времени подачи жидкости, так как единичный сигнал переводит триггер 81 ь исходное положение, характеризующееся нулевым выходным сигналом. Срабатывание га 86 И приводит к ссзСщемию второй управляющей камеры элемента 84 сравнения с атмосферой. Мощный задатчик 8С управления позволяет задать входное давление
0
5
0
5
0
5
0
5
регулируемого пнеемосопротивлемия 85 и при колебании давления питания снизить его до нижнего уровня. Входной сигнал РВХ- разобщает измерительную емкость oi первой управляющей камеры элемента 84 сравнения, что исключает падение давления в ней после истечения времени опреде- ленмя надоя.
Увлажнение предварительной дозы корма происходит при выключенном доильном аппарате, когда на выходе элемента 69 ЗАПРЕТ доильного аппарата сигнал равен нулю, т.е. тогда давление, пропорциональное количеству жидкости для увлажнения предварительной дозы корма, от маломощного задатчика 89 подается в первую управляющую камеру элемента 84 сравнения.
Для повышения эффективности процесса увлажнения корма струйные распылители 67 располагаются противоположно, а поток комбикорма направляется по центру увлажнителя.
Сигнал РВых5 подается к генератору 62 импульсов доильного аппарата для формирования тактов наполнения и выжимания молока.
Формула изобретения 1. Индивидуальный дозатор-увлажнитель корма, содержащий бункер-накопитель с подающим механизмом, бункер-дозатор с пнепмоцилиндрами открытия, расположенный под бункером-накопителем, дозатор с тремя сильфонами обратной связи, кормушку, увлажнитель с распылителем жидкости и пневмосхему блока управления, включающую воздухораспределитель, выходы которого соединены с пневмоцилиндрами открытия бункера-дозатора, вход которого соединен с первым выходом реле времени загрузки бункера, при этом торой выход последнего соединен с классификатором сигналов, третий - с реле времени определения надоя, четвертый -с блоком коммутации, а вход подключен к третьему сильфону обратной связи, второму входу блока коммутации и регулируемому пневмосопротивле- нию, причем второй и третий входы классификатора сигналов связаны соответствен1 :о с первым и вторым сильфонами обратно: -, связи, его четвертый вход совмещен с геовиг.; выходом реле времени опреде- г.гнил нидоя, а пятый вход связан с первым UI-IV.JC .,M блока коммутации, второй выход ксг. сро. з соединен с входом генератора им- пульг.ое, а третий ьход связан с выходом кл; с;1 .фикзтора сигналов, кроме того, второй ылхсд реле времени определения надоя, подключен к измерителю темпа нарастания сигнала, а второй и третий входы связаны соответственно с первым выходом измерителя темпа нарастания сигнала и с входом элемента ЗАПРЕТ доильного аппа- рата, первый выход которого соединен с элементом НЕ, а второй - с вторым входом измерителя темпа нарастания сигнала, третий вход которого совмещен с выходом блока струйных преобразователей, при этом выход генератора импульсов подключен к подающему механизму бункера-накопителя, отличающийся тем, что, с целью оптимизации индивидуального дозированного кормления животных, он снабжен бло- ком управления распылителями увлажнителя корма, при этом первый вход последнего соединен с пятым выходом реле времени разгрузки бункера, второй вход связан с выходом элемента НЕ, третий вход подключен к выходу измерителя темпа нарастания сигнала, четвертый вход совмещен с третьим выходом реле времени определения надоя, а выходы подключены к соответствующим камерам распылителей жидкости увлажнителя.
Щиг.1
| Индивидуальный дозатор корма | 1988 |
|
SU1590059A1 |
