Изобретение относится к системам автоматического контроля и может найти применение в отраслях промышленности, где необходим контроль за остановкой объекта, имеющего выступы, например тягового органа ковшового элеватора, зубчатого диска и т.п.
Целью изобретения является повышение надежности в работе.
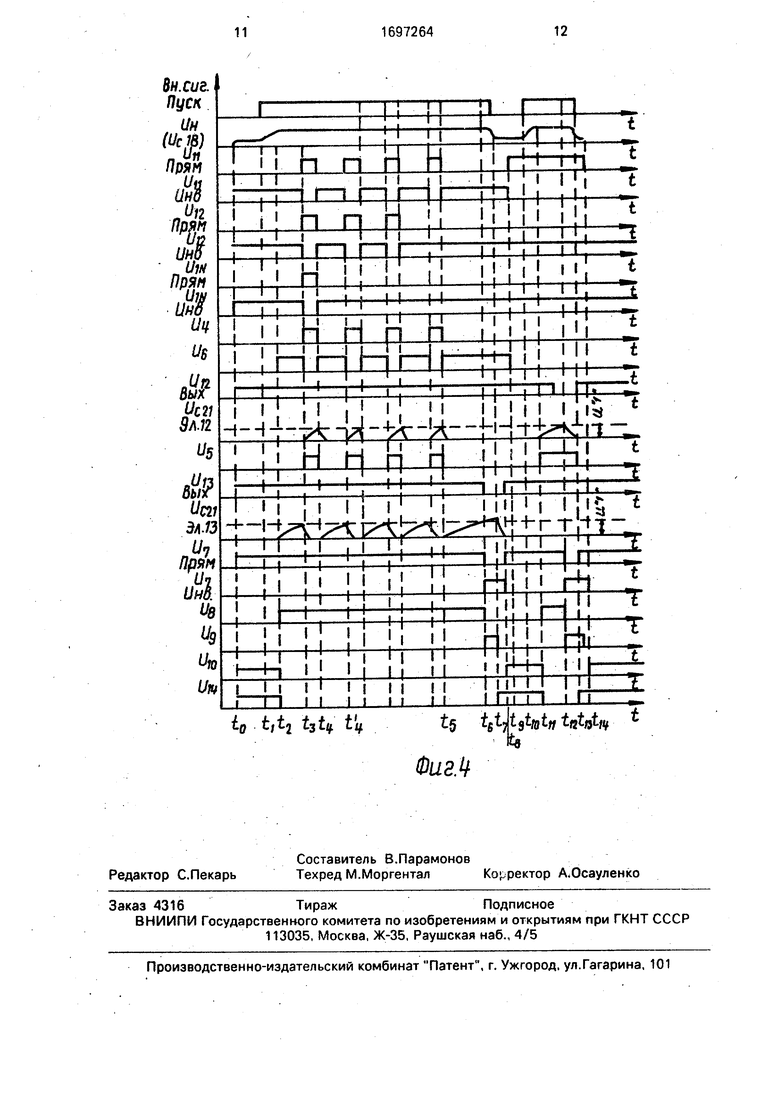
На фиг. 1 приведена функциональная схема предлагаемого устройства; на фиг. 2 и 3 - схемы элементов задержки; на фиг. 4 - временные диаграммы.
Устройство для контроля остановки объекта, имеющего выступы, содержит датчики 11, 12IN положений, где N - максимально допустимое число последовательно отсутствующих выступов 2 на объекте 3, элементы ИЛИ 4 и И 5-10, элементы 11-13 задержки, инвертор 14, при этом датчики 11, 12.....1N положения расположены вдоль обьекта 3. на расстоянии друг от друга, где LUI - шаг размещения выступов 2 на объекте 3, причем на вход элемента 11 задержки
поступает внешний сигнал пуска, прямые выхода датчиков 1i, 12,.. JN положений соединены с входами элемента ИЛИ 4, выход которого соединен с первым входом элемента И 5, инверсные выходы датчиков 1i,
12IN положения соединены с первым,
вторымN-м входами элемента И б, выход
которого соединен с входом элемента 13 задержки, выход элемента И 5 соединен с входом элемента 12 задержки, выходы элементов 12 и 13 задержки соединены с входами элемента И 7, прямой выход элемента И 7 соединен с первыми входами элементов И 8 и 10, инверсный выход элемента И 7 соединен с первым входом элемента И 9, выход элемента 11 задержки соединен с вторыми входами элементов И 5, 8.9, N + 1 -м входом зле .ента Ибис входом инвертора 14, выход которого соединен с вторым входом элемента И 10, выходы элементов И 8-10 соединены с выходными зажимами устройства.
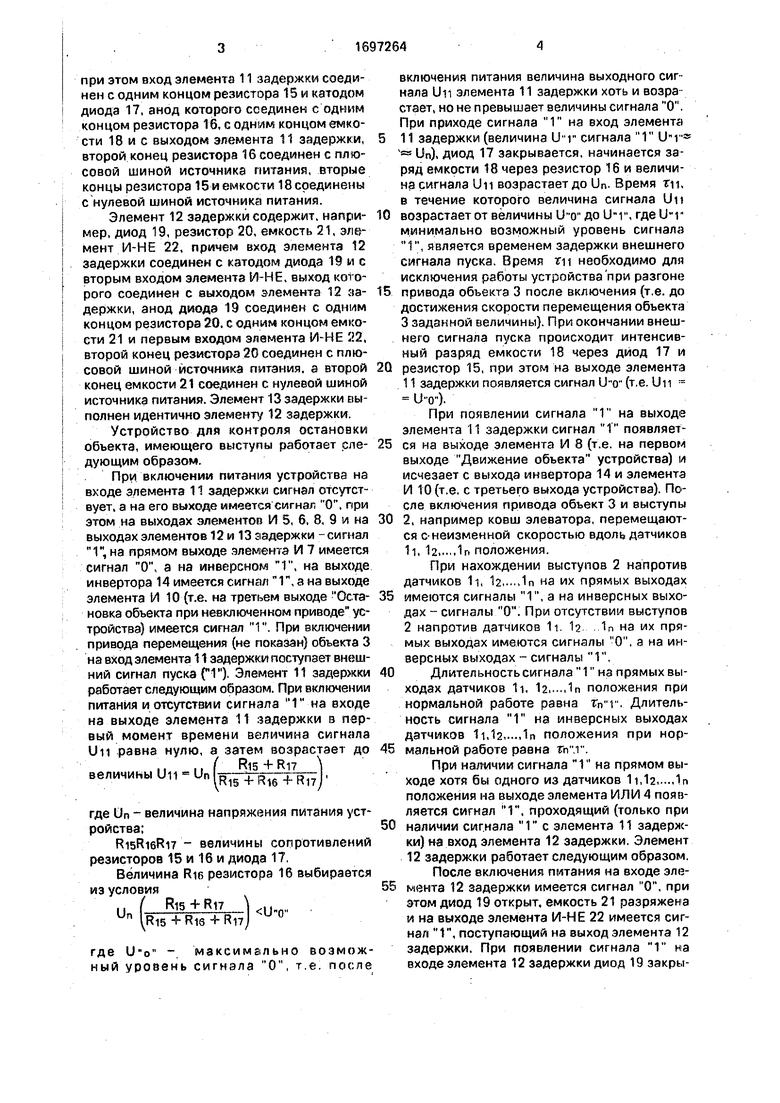
Элемент 11 задержки содержит, например, резисторы 15 и 16, диод 17, емкость 18,
О
ю
ю о
N
при этом вход элемента 11 задержки соединен с одним концом резистора 15 и катодом диода 17, анод которого соединен с одним концом резистора 16, с одним концом емкости 18 и с выходом элемента 11 задержки, второй конец резистора 16 соединен с плюсовой шиной источника питания, вторые концы резистора 15 и емкости 18 соединены с нулевой шиной источника питания.
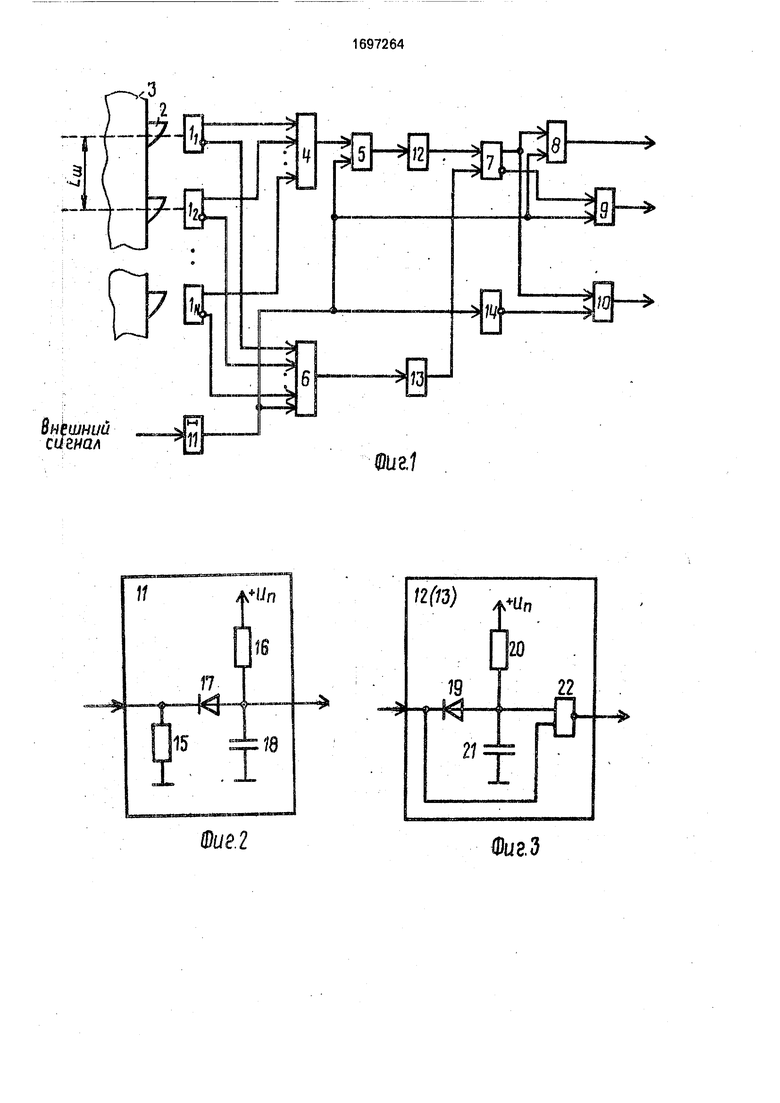
Элемент 12 задержки содержит, например, диод 19, резистор 20. емкость 21, элемент И-НЕ 22, причем вход элемента 12 задержки соединен с катодом диода 19 и с вторым входом элемента И-НЕ, выход которого соединен с выходом элемента 12 задержки, анод диода 19 соединен с одним концом резистора 20, с одним концом емкости 21 и первым входом элемента И-НЕ 22, второй конец резистора 20 соединен с плюсовой шиной источника питания, а второй конец емкости 21 соединен с нулевой шиной источника питания. Элемент 13 задержки выполнен идентично элементу 12 задержки.
Устройство для контроля остановки объекта, имеющего выступы работает следующим образом.
При включении питания устройства на входе элемента 11 задержки сигнал отсутствует, а на его выходе имеется сигнал О, при этом на выходах элементов И 5. 6, 8, 9 и на выходах элементов 12 и 13 задержки - сигнал 1, на прямом выходе элемента И 7 имеется сигнал О, а на инверсном 1, на выходе инвертора 14 имеется сигнал Г, а на выходе элемента И 10 (т.е. на третьем выходе Остановка объекта при невключенном приводе устройства) имеется сигнал 1. При включении привода перемещения (не показан) объекта 3 на вход элемента 11 задержки поступает внешний сигнал пуска (1). Элемент 11 задержки работает следующим образом. При включении питания и отсутствии сигнала 1 на входе на выходе элемента 11 задержки в первый момент времени величина сигнала Un равна нулю, а затем возрастает до
I it { Rig +R17
величины Un-
Ц
R15+R16+R17J
где Un - величина напряжения питания устройства;
RisRieRi величины сопротивлений резисторов 15 и 16 и диода 17.
Величина Rie резистора 16 выбирается из условия
RIS + R17
u(l
Ris +Rie + Ri7
где UHo - максимально возможный уровень сигнала О, т.е. после
включения питания величина выходного сигнала Un элемента 11 задержки хоть и возрастает, но не превышает величины сигнала О. При приходе сигнала 1 на вход элемента
11 задержки (величина сигнала 1 1)пгг ss Un), диод 17 закрывается, начинается заряд емкости 18 через резистор 16 и величина сигнала Un возрастает до Un. Время тп, в течение которого величина сигнала Un
возрастает от величины до UT, где минимально возможный уровень сигнала 1, является временем задержки внешнего сигнала пуска. Время щ необходимо для исключения работы устройства при разгоне
привода объекта 3 после включения (т.е. до достижения скорости перемещения объекта 3 заданной величины). При окончании внешнего сигнала пуска происходит интенсивный разряд емкости 18 через диод 17 и
резистор 15, при этом на выходе элемента
11задержки появляется сигнал U-o (т.е. Un U-o).
При появлении сигнала 1 на выходе элемента 11 задержки сигнал 1 появляется на выходе элемента И 8 (т.е. на первом выходе Движение объекта устройства) и исчезает с выхода инвертора 14 и элемента И 10 (т.е. с третьего выхода устройства). После включения привода объект 3 и выступы
2, например ковш элеватора, перемещаются с-неизменной скоростью вдоль датчиков
11, 121п положения.
При нахождении выступов 2 напротив датчиков 1i, 12,...,1п на их прямых выходах
имеются сигналы 1, а на инверсных выходах - сигналы О. При отсутствии выступов 2 напротив датчиков 1i i 1n на их прямых выходах имеются сигналы О, а на инверсных выходах - сигналы 1.
Длительность сигнала 1 на прямых выходах датчиков 1i, 121п положения при
нормальной работе равна . Длительность сигнала 1 на инверсных выходах датчиков 1i,l2,...,1n положения при нормальной работе равна Гп М,
При наличии сигнала 1 на прямом выходе ХОТЯ бы ОДНОГО ИЗ ДаТЧИКОВ 11,121п
положения на выходе элемента ИЛИ 4 появляется сигнал 1, проходящий (только при наличии сигнала 1 с элемента 11 задержки) на вход элемента 12 задержки. Элемент
12задержки работает следующим образом.
После включения питания на входе эле- мента 12 задержки имеется сигнал О, при этом диод 19 открыт, емкость 21 разряжена и на выходе элемента И-НЕ 22 имеется сигнал 1, поступающий на выход элемента 12 задержки. При появлении сигнала 1 на входе элемента 12 задержки диод 19 закрывается, емкость 21 заряжается через резистор 20, процесс заряда емкости 21 аналогичен процессу заряда емкости 18 элемента 11 задержки. Время r-ia, за которое величина Uc2i напряжения на емкости 21 (т.е. на первом входе элемента И-НЕ 22) достигнет величины Ji, задается величинами резистора 20 и ем-сости 21 исходя из условия
ТП ДГгГГ
где А Гг.-т1- заданная допустимая величина УЬЙЛИЧ /НИЯ времени, т.е. на первом входе элемента 22 И-НЕ сигнал V появится через время Т12 после появг-енмя сигнала i на втором входе элемента И-НЕ 22 (т.е. на входе элемента 12 задержки). Следовательно, на выход элемента И-НЕ 22 (т.е. на выходе элемента 12 задержки) сигнал О появится только в том случае, ес,И т п, где - фактическое время нахождения
выступа 2 напротив датчика 11,1а1п поло
жения (т.е. фактическая длительное ь сигнала 1 на прямом выходе датчика 1i,1, ...1n положения).
При наличии сигнала О на выходе элемента 12 задержки на прямом выходе эле- мента И 7 появляется сигнал О, а на инверсном выходе - сигнал 1, при этом исчезает сигнал 1 на выходе элемента И 8 (т.е. на первом выходе устройства) и появляется на выходе элемента И 9 (т.е. на втором выходе Останов объекта при включенном приводе устройства).
Если количество последовательно исчезнувших выступов 2 меньше N, то на выходе элемента ИЛИ 4 при движении объекта 3 обязательно появится сигнал 1 и его длительность определяется скоростью движения объекта 3(т.е., например, при N 4 исчезновение последовательно трех выступов 2 не влияет на появлениесигнала 1 на выходе элемента ИЛИ 4 при движении объекта 3).
При отсутствии выступов 2 напротив
датчиков 11,12In и наличии сигнала 1 на
выходе элемента 11 задержки на выходе элемента И 6 появляется сигнал 1, поступа- ющий на вход элемента 13 задержки, работающего аналогично элементу 12 задержки, т.е. имеет место тчз т + , гдедГггг - заданная допустимая величина увеличения времени .
Если количество последовательно исчезнувших выступов 2 меньше N, то длительность сигнала 1 на выходе элемента И 6 (при наличии сигнала 1 на выходе элемента 11 задержки) определяется только скоростью объекта 3, т.е. сигнал О на выходе элемента 13 задержки появится при ГпТФ 2ri3, где тьтф - фактическое время отсутствия выступов 2 напротив датчиков 1i.1a1п. Рели количество
г оследовЈтельно исчезнувших выступов 2 равно или больше N и если 2гп-г (т.е. Тпт), го на выходе с-лэмента 13 задержки также появится сигнал О.
При появлении сигнала О на выходе элемента 13 задержки злегомты И 7--9 работают так же. как и при появлении сигнала О на выходе элемента }2 задержка.
Ф о р м v п а г з о г с е г е и и я
Устройство для контроля ост31.овшобъекта, имеющего выступы, содержащее датчик положении с прямы; t и инверсным зыходами. два элемента задержки, выходы которых соединены с входами элемента И, отличающееся тем, что, с целью пооышения наиежности в работе, оно дополнительно содержит -1 датчиков положения, расположенных едоль объекта :(з расстоянии дру ог др,га. равюм шагу размещения выступов на объекте, третий 3ie- мент задержки, пять элементов И, элемент ИЛИ и инвертор, причем на вход третьего элемента задержка поступает на внешний сигнал пуска движения объекта, последовательно соединены прямые выходы датчиков положения, элемент ИЛИ дторой элемент И, первый элемент задержки, первый и третий элементы И, выход третьего элемента задержки соединен с вторыми входами второго третьего и четвертого элементов И м через инверт ор с вторым входом пя гого элемента И, первый вход которого соединен с прямым выходом первого элемента И, инверсный выход которого соединен с первым входом четвертого элемента И, последовательно соединены инверсные выходы датчиков положения, шестой элемент И, вход второго элемента задержки, (N + 1)-й вход шестого элемента И соединен с выходом третьего элемента задержки, выходы третьего, четвертого к пятого элементов И являются выходами устройства.
Внешнийsfr;
сигналЛ
Шг.1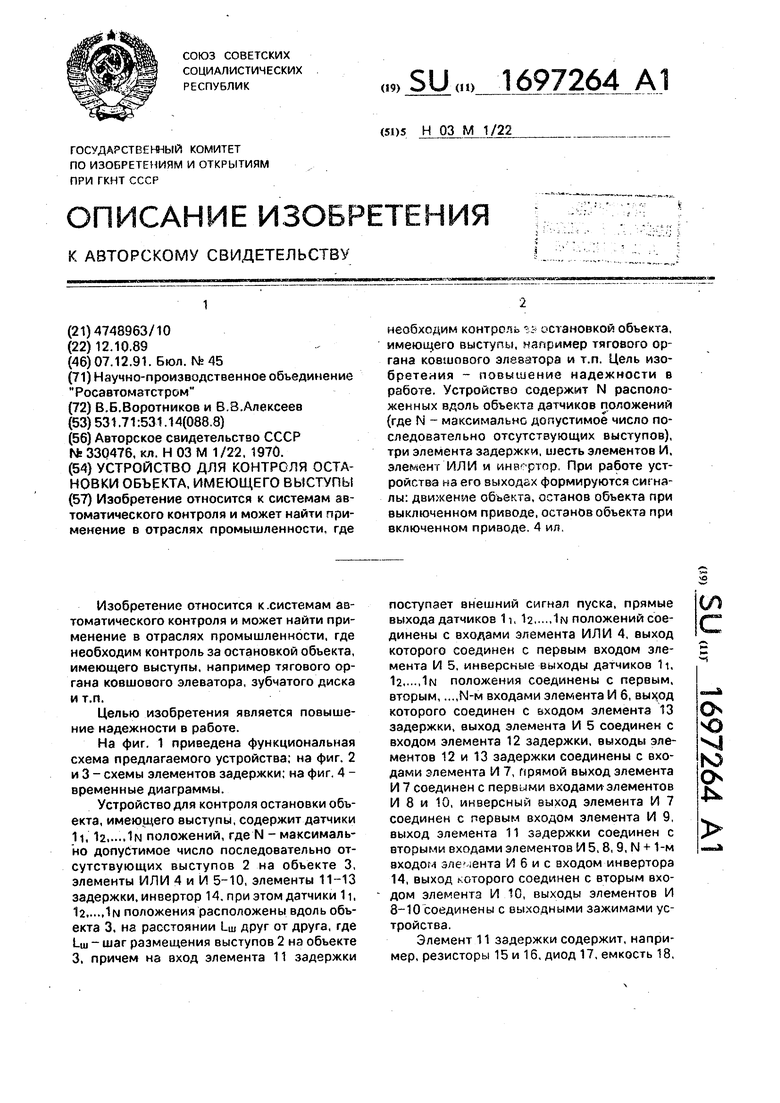

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ НАГРУЗКИ ПОСТОЯННЫМ ТОКОМ | 1992 |
|
RU2025861C1 |
| Устройство для голосования и счетчик со случайным порядком счета Ордынцева | 1990 |
|
SU1751792A1 |
| АРБИТР ПРИОРИТЕТОВ МНОГОРАНГОВЫХ ЗАПРОСОВ | 2017 |
|
RU2649948C1 |
| МНОГОПОРОГОВОЕ УСТРОЙСТВО | 2000 |
|
RU2181926C2 |
| Система автоматического пожаротушения | 1987 |
|
SU1461486A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТОКА В ФАЗЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1991 |
|
RU2022442C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
| Электронная приставка к транзисторной системе зажигания | 1991 |
|
SU1800086A1 |
| Устройство для измерения параметров дыхания | 1990 |
|
SU1803037A1 |
| Устройство для управления преобразователем переменного тока в переменный | 1990 |
|
SU1725345A1 |
Изобретение относится к системам автоматического контроля и может найти применение в отраслях промышленности, где необходим контроль : остановкой объекта, имеющего выступы, например тягового органа ковшового элеватора и т.п. Цель изобретения - повышение надежности в работе. Устройство содержит N расположенных вдоль объекта датчиков положений (где N - максимально допустимое число последовательно отсутствующих выступов), три элемента задержки, шесть элементов И. элемент ИЛИ и инвертор. При работе устройства на его выходах формируются сигналы: движение обьекта, останов объекта при выключенном приводе, останов объекта при включенном приводе. 4 ил
Фие.2
ФиаЗ
Вн.сиг. Пуск
UH (UC®
Прям
Jb
Un
nm
Uyf
nUin
Прям
Uw
Цнб
Uv Us
& УСЯ Змг
и
Л
Ueu ЭлЯ
U7 Прям
Unl U8
Un U
{-О . ttf.
ts tt
t/jtet/v
ФивМ
| УСТРОЙСТВО для КОНТРОЛЯ ОСТАНОВ^ и ВРАЩЕНИЯ ВАЛАВС^ООЮЗИАЯ1АТЕ[|]10-ТЕХ1^ | 0 |
|
SU330476A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
