где пц - количество импульсов, подсчитанных счетчиком 6 периодов измеряемой частоты;
пь - количество импульсов, подсчитанных счетчиком 5 qepnoflOB опорной частоты;
Fon - частота опорного генератора 4.
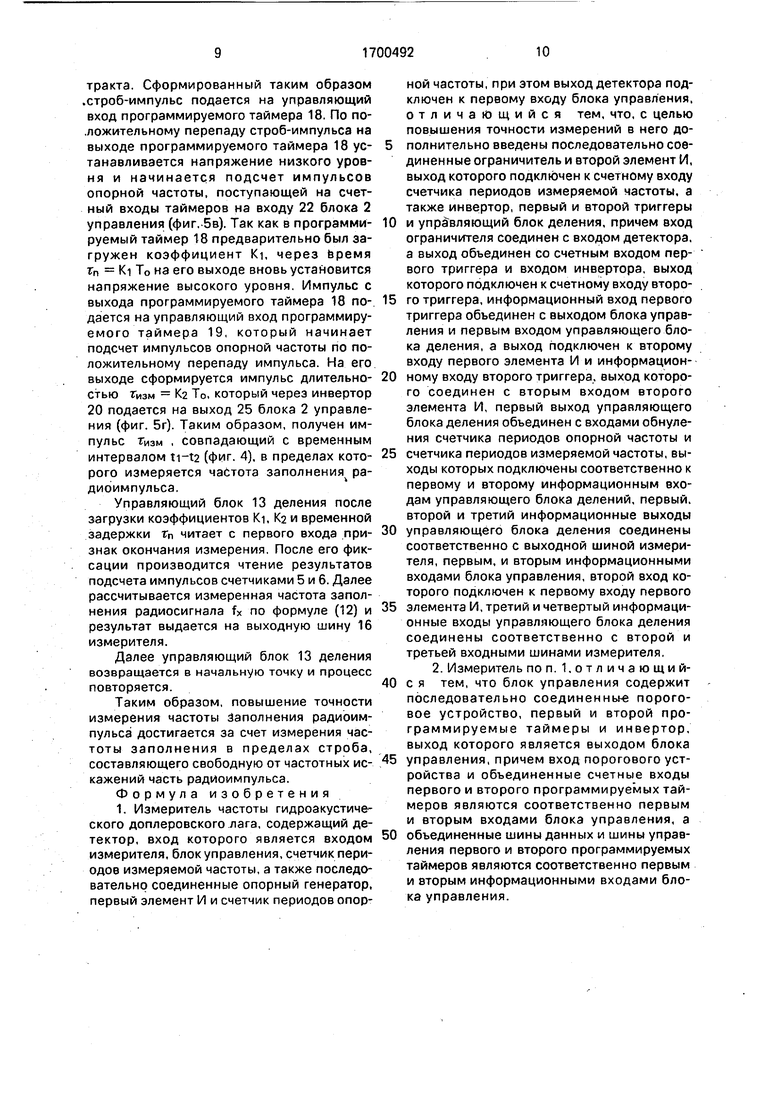
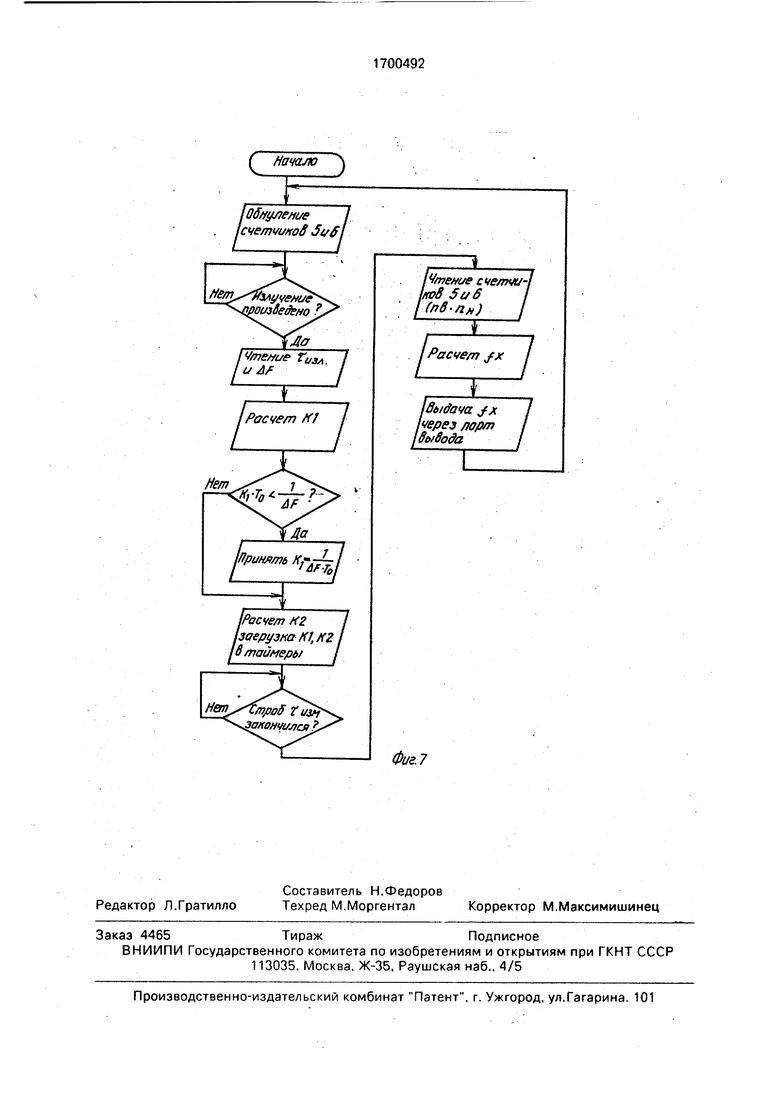
Рассмотрим теперь работу блока 2 управления и формирование строб-импульса Гизм. Для этого обратимся к-блок-схеме алгоритма функционирования управляющего блока 13 деления (фиг. 7).
Вначале управляющий блок 13 деления формирует сигнал сброса счетчиков 5 и б, который подается на их входы обнуления. Затем производится чтение признака произведенного лагом излучения, который поступает по входной шине 15. После фиксации признака производится чтение
0
5
Полученные коэффициенты Ki и К2 загружаются в программируемые таймеры 18 и 15 соответственно блока 2 управления по шине 23 данных. Разделение загрузки по . времени производится с помощью шины 24 управления,
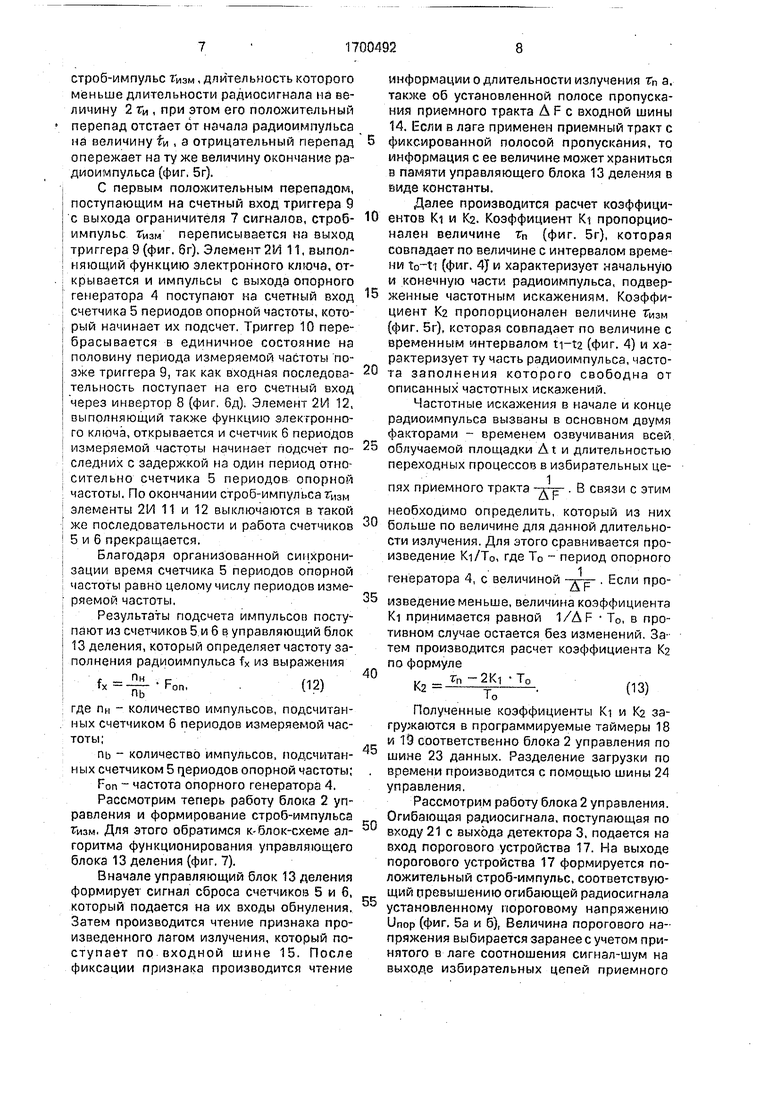
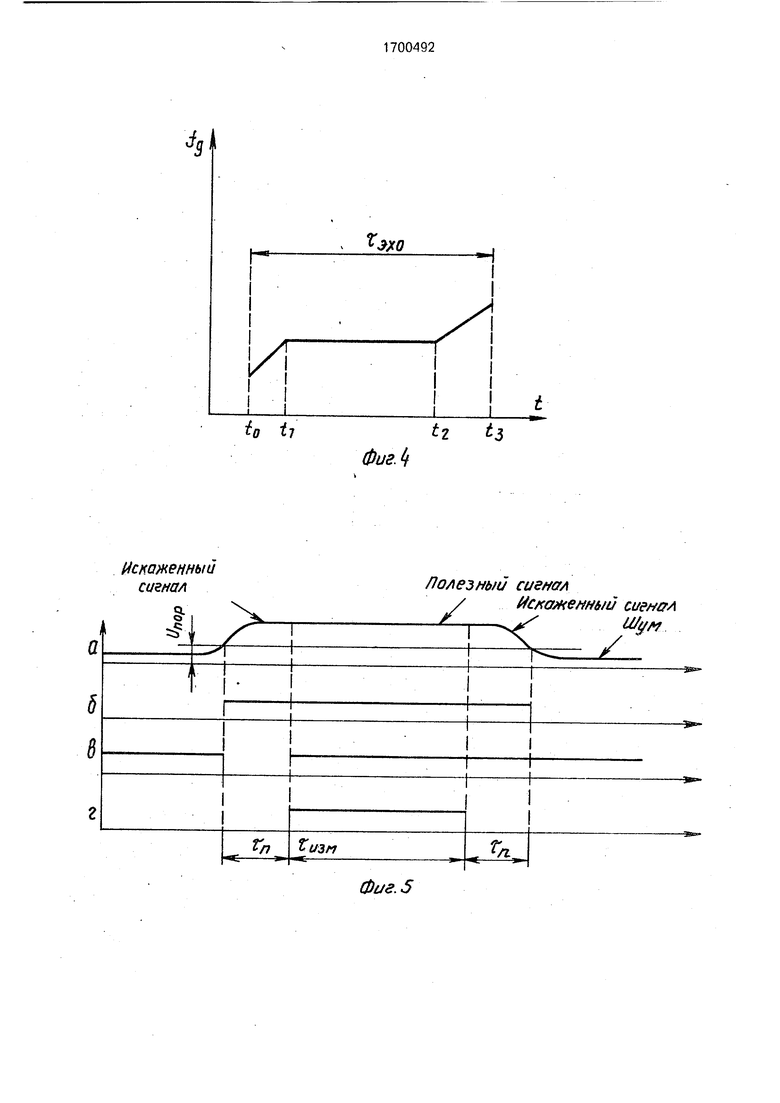
Рассмотрим работу блока 2 управления. Огибающая радиосигнала, поступающая по входу 21 с выхода детектора 3, подается на вход порогового устройства 17. На выходе порогового устройства 17 формируется положительный строб-импульс, соответствующий превышению огибающей радиосигнала установленному пороговому напряжению Unop (фиг. 5а и б), Величина порогового напряжения выбирается заранее с учетом принятого в лаге соотношения сигнал-шум на выходе избирательных цепей приемного
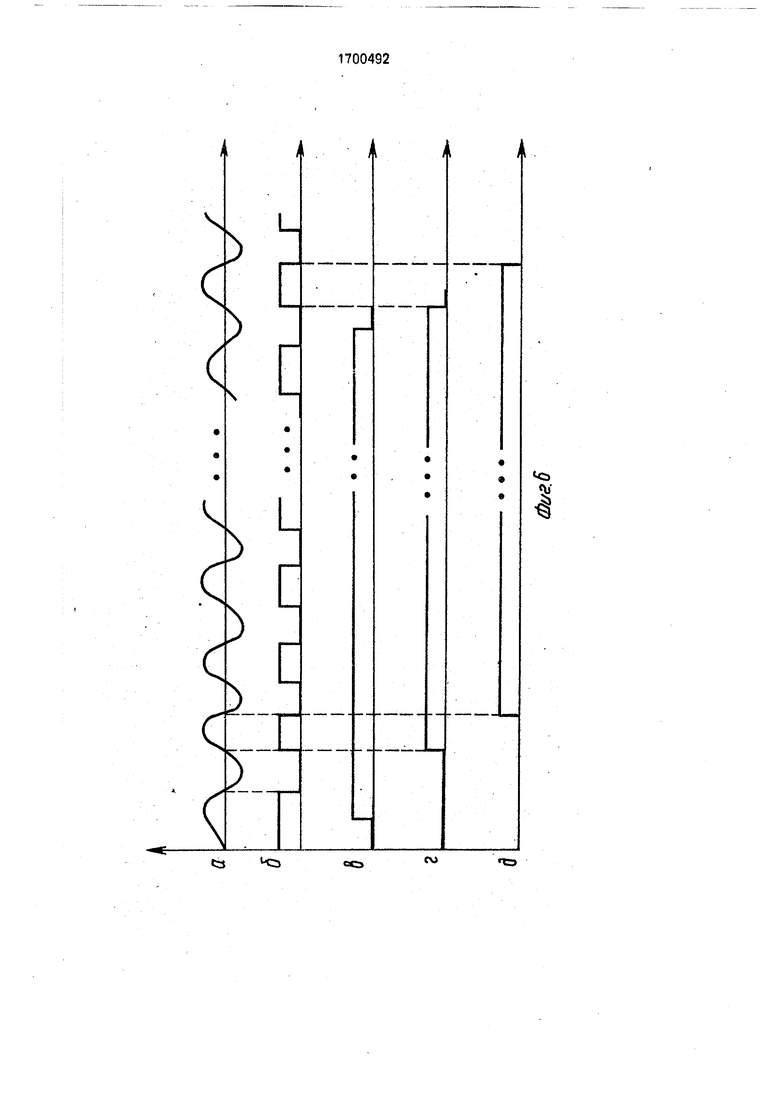
тракта. Сформированный таким образом .строб-импульс подается на управляющий вход программируемого таймера 18. По по- .ложительному перепаду строб-импульса на выходе программируемого таймера 18 устанавливается напряжение низкого уровня и начинается подсчет импульсов опорной частоты, поступающей на счетный входы таймеров на входу 22 блока 2 управления (фиг, 5в). Так как в программируемый таймер 18 предварительно был загружен коэффициент KI, через время тп - Ki To на его выходе вновь установится напряжение высокого уровня. Импульс с выхода программируемого таймера 18 подается на управляющий вход программируемого таймера 19, который начинает подсчет импульсов опорной частоты по положительному перепаду импульса. На его выходе сформируется импульс длительностью Гизм Ка То, который через инвертор 20 подается на выход 25 блока 2 управления (фиг. 5г). Таким образом, получен импульс Тизм , совпадающий с временным интервалом ti-t2 (фиг. 4), в пределах которого измеряется частота заполнения радиоимпульса.
Управляющий блок 13 деления после загрузки коэффициентов KL «2 и временной задержки тп читает с первого входа признак окончания измерения. После его фиксации производится чтение результатов подсчета импульсов счетчиками 5 и 6. Далее рассчитывается измеренная частота заполнения радиосигнала fx по формуле (12) и результат выдается на выходную шину 16 измерителя.
Далее управляющий блок 13 деления возвращается в начальную точку и процесс повторяется.
Таким образом, повышение точности измерения частоты Заполнения радиоимпульса достигается за счет измерения частоты заполнения в пределах строба, составляющего свободную от частотных искажений часть радиоимпульса.
Формула изобретения
1. Измеритель частоты гидроакустического доплеровского лага, содержащий детектор, вход которого является входом измерителя, блок управления, счетчик периодов измеряемой частоты, а также последовательно соединенные опорный генератор, первый элемент И и счетчик периодов опорной частоты, при этом выход детектора подключен к первому входу блока управления, отличающийся тем, что, с целью повышения точности измерений в него дополнительно введены последовательно соединенные ограничитель и второй элемент И, выход которого подключен к счетному входу счетчика периодов измеряемой частоты, а также инвертор, первый и второй триггеры
и управляющий блок деления, причем вход ограничителя соединен с входом детектора, а выход объединен со счетным входом первого триггера и входом инвертора, выход которого подключен к счетному входу второго триггера, информационный вход первого триггера объединен с выходом блока управления и первым входом управляющего блока деления, а выход подключен к второму входу первого элемента И и информационному входу второго триггера, выход которого соединен с вторым входом второго элемента И, первый выход управляющего блока деления объединен с входами обнуления счетчика периодов опорной частоты и
счетчика периодов измеряемой частоты, выходы которых подключены соответственно к первому и второму информационным входам управляющего блока делений, первый, второй и третий информационные выходы
управляющего блока деления соединены соответственно с выходной шиной измерителя, первым, и вторым информационными входами блока управления, второй вход которого подключен к первому входу первого
элемента И, третий и четвертый информационные входы управляющего блока деления соединены соответственно с второй и третьей входными шинами измерителя, 2. Измеритель по п. 1,отличающийс я тем, что блок управления содержит последовательно соединенные пороговое устройство, первый и второй программируемые таймеры и инвертор, выход которого является выходом блока
управления, причем вход порогового устройства и объединенные счетные входы первого и второго программируемых таймеров являются соответственно первым и вторым входами блока управления, а
объединенные шины данных и шины управления первого и второго программируемых таймеров являются соответственно первым и вторым информационными входами блока управления.
сч
во
«N4
I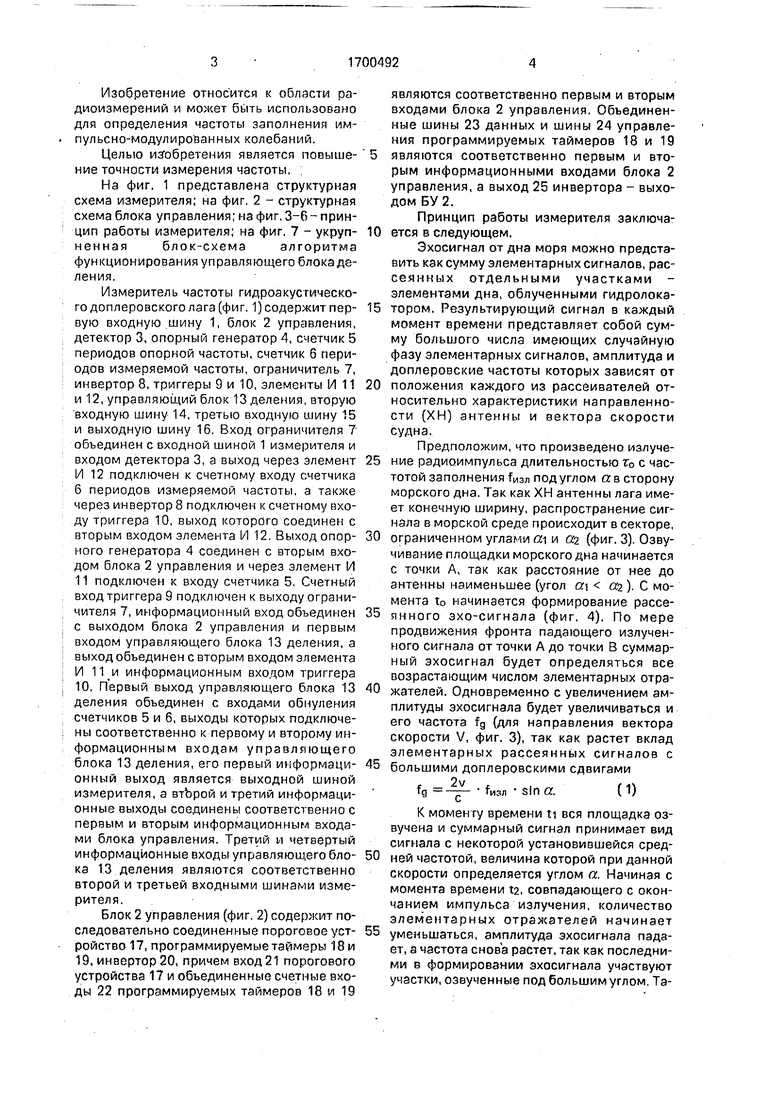
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный программируемый преобразователь код-фаза | 1990 |
|
SU1742998A1 |
| ПРИЕМОИНДИКАТОР | 1990 |
|
SU1814387A1 |
| Устройство для измерения частоты и периода гармонического сигнала | 1991 |
|
SU1797714A3 |
| Устройство для измерения разности частот вращения | 1986 |
|
SU1613959A1 |
| Устройство для измерения параметров вращения | 1986 |
|
SU1613960A1 |
| Устройство для электрохимического растворения металлов | 1988 |
|
SU1641897A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ С ПРОГРАММНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 1997 |
|
RU2110890C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ | 2019 |
|
RU2742710C2 |
| Измеритель скорости движения объекта | 1989 |
|
SU1651675A1 |
| Устройство для измерения времени установления выходного сигнала цифроаналогового преобразователя | 1990 |
|
SU1716601A2 |
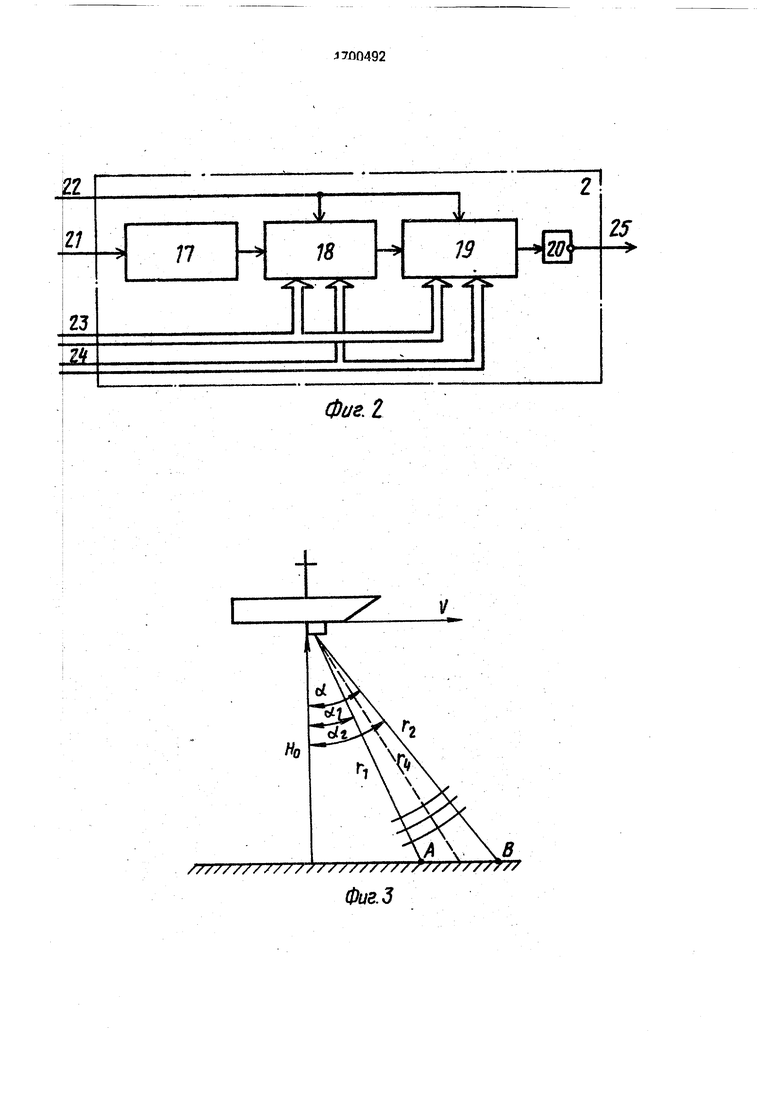
Изобретение относится к области радиоизмерений и может быть использовано для определения частоты заполнения импульсно-модулированных колебаний. Цель изобретения - повышение точности измерений. Измеритель частоты гидроакустического до плеровского лага содержит входную шину 1, блок 2 управления, детектор 3, опорный генератор 4, счетчик 5 периодов опорной частоты, счетчик 6 периодов измеряемой частоты и элемент И 11. Введение ограничителя 7, инвертора 8, триггеров 9 и 10, элемента И 12 и управляющего блока 13 деления позволило повысить точность за счет измерения частоты заполнения только в пределах строба, составляющего свободную от частотных искажений часть радиоимпульса. 1 з.п.ф-лы. 7 ил.
tsl
1Г СМ
VMO
И
to ti
Искаженный сигнал
I I
I I
t
t2 3
Фиг.Ь
Полезный сигнал
/ Искаженный сигнал
Фиг. 5
Ч
l
(
сз Чэ
о
со
o
Г Начало Л
Шнуление сче/пчико8 5i/6
Г/
IPocw/n /ft
jfacve/n H2 иаерузка K1,KZ ( 8 таймеры
Hsn tmflof Ги& окончился I
Чтение сче/пчи- w8 5u6 (пв-п)
t I Расчет /ж /
т:
18ы0ача jx vepey дорт St iSoda
| Измеритель частоты заполнения радиоимпульсов | 1978 |
|
SU773513A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
