Изобретение относится к вторичным источникам питания и может быть использовано в системах питания устройств автома- ики и вычислительной техники.
Целью изобретения является повышение точности стабилизации выходного напряжения и упрощение осуществления.
На фиг. 1 представлена схема устройства, реализующего предлагаемый способ, вариант; на фиг. 2 - временные диаграммы, поясняющие работу устройства.
Устройство (фиг, 1) содержит источник 1 питания, к которому через последовательный регулирующийэлемент 2 (например, транзистор) подключены дроссель 3 и диод 4. Другой вывод дросселя 3 подключен к параллельному регулирующему элементу 5
и через диод 6 к конденсатору фильтра 7 и нагрузке 8.
Сигнал задающего генератора 9 (30 через делитель 10 частоты с выходным напряжением тактовой частоты подается на вход генератора 11 пилообразного напряжения, выходное напряжение которого имеет амплитуду, пропорциональную выходному напряжению. На вход этого же узла 11 подается сигнал ЗГ 9. Действием этого сигнала обеспечивается постоянный сдвиг по фазе сигнала пилообразного напряжения от тактового сигнала, равный в данном случае 90 эл.град. На вход нуль-органа 12 подаются сигналы пилообразного и опорного напряжений от генератора 11 и источника 13 соответственно.
VI
О
го со -N о
Результирующий сигнал нуль-органа 12 подается на вход блока 14 сопряжения сигналов управления и входных цепей регулирующих элементов 2 и 5, причем на вход элемента 2 посредством узла 15 усиления подается преобразованный сигнал только от нуль-органа 12.
В узле 16 усиления блока 14 осуществляется при помощи сигнала от ЗГ 9 блокирование открывания элемента 5 в начальной части сигнала пилообразной формы (границей начальной и конечной частей сигнала пилообразной формы является конец каждого тактового сигнала),
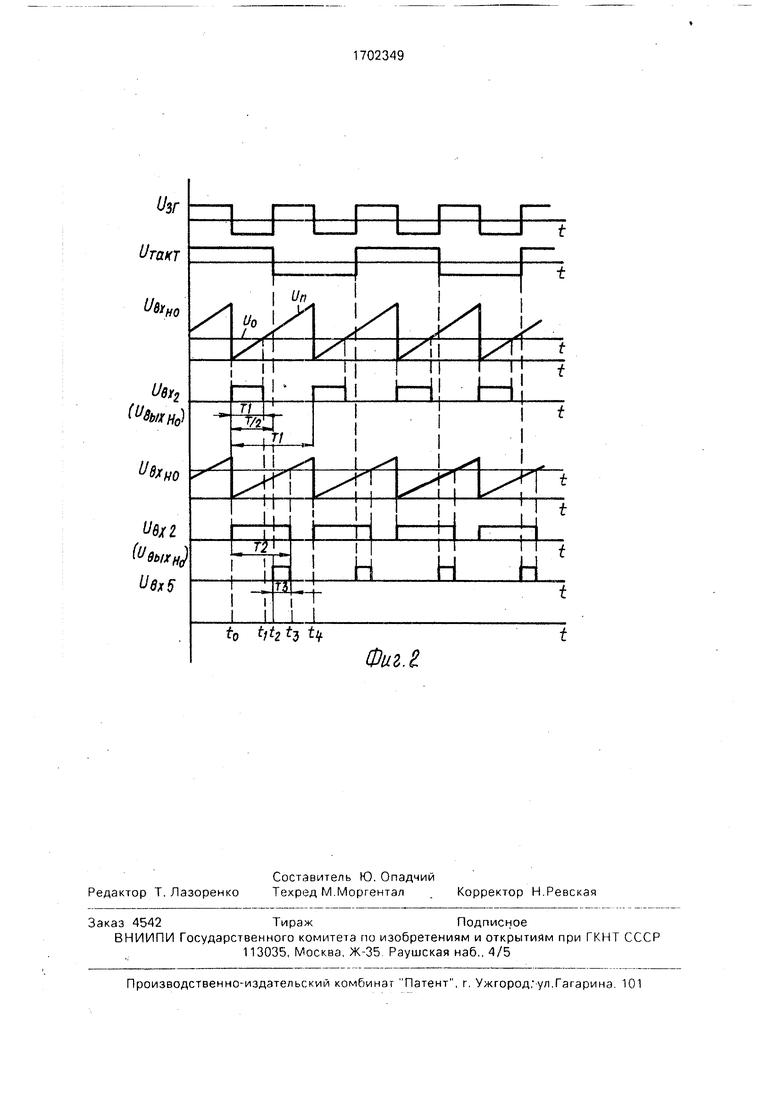
На фиг. 1 и 2 приняты следующие обозначения: UBX - напряжение источника 1 питания; Узг - выходной сигнал ЗГ 9; Утакт - тактовый сигнал; UBX но входные сигналы нуль-органа 12; Un - сигнал пилообразной формы; U0 - сигнал источника 13 опорного напряжения; 1)Вых но - выходной сигнал нуль-органа 12; Uex2, UBx5 выходные сигналы регулирующих элементов 2 и 5; 1)Вых - выходной сигнал стабилизатора.
Рассмотрим два возможных режима работы регулирующих элементов 2 и 5.
Когда сигнал пилообразной формы Un в своей начальной части становится равным по величине сигналу U0 источника 13 опорного напряжения (рабочая точка), то на выходе нуль-органа 12 сигнал Увых но равен по длительности Ti (сигналы 1)Вых но и имеют одинаковую форму и поэтому изображены на фиг. 2 как один сигнал).
Этот сигнал через узел 15 блока 14 подается на вход регулирующего элемента 2, причем этот элемент 2 открыт в течение времени TL
Регулирующий элемент 5 постоянно закрыт из-за блокирующего действия сигнала ЗГ 9, имеющего отрицательную величину.
Стабилизатор работает в режиме проходного регулятора напряжения, причем иВых меньше UBx.
Если сигнал пилообразной формы Un становится равным по величине сигналу U0 источника 13 опорного напряжения в своей конечной части, то на выходе нуль-органа 12 будет сигнал 1)Вых но с длительностью
Та (Та -, где Т - период пилообразного
сигнала).
При этом регулирующий элемент 2 открыт в течение времени Та. а регулирующий элемент 5 открыт в течение времени - Т 2
Таким образом, стабилизатор работает как чисто проходной регулятор постоянного напряжения при нахождении рабочей точки
в диапазоне от t0 до ta (первая половина периода), а в диапазоне от ta до t4 (вторая половина периода) стабилизатор работает как регулятор с параллельным регулирующим элементом.
При сдвиге фазы сигнала пилообразной формы относительно тактового сигнала, равной 90 эл.град., максимальное выходное напряжение стабилизатора (рабочая точка
находится в Т)равно
I 1 - UBX -О ( I иеых- -«г. - UE
1 -у где у 0,5 - коэффициент заполнения.
Таким образом, от точки ta до точки т.4 режим работы стабилизатора плавнсгпере- ходит от режима работы регулятора, понижающего входное напряжение, до режима
работы регулятора, повышающего входное напряжение.
По сравнению с известным способом предлагаемый способ позволяет повысить точность стабилизации напряжения, так как
обеспечивается плавное регулирование выходного напряжения во всем диапазоне регулирования (от t0 до t4), в то время как в известном способе при переходе с одного режима регулирования на другой поддерживается разный уровень выходного напряжения.
Кроме того, при реализации предлагаемого способа требуется только один нуль- орган (компаратор), а в известном способе
- два, т.е. предлагаемый способ схемно проще реализовать.
В предлагаемом способе также достигается автоматическое ограничение у по максимуму, т.е. исключен выход стабилизатора
при работе параллельного регулирующего элемента на обратный закон регулирования, в то время как в известном способе необходимо вводить специальное блок ограничения у.
в схеме на фиг. 1 стабилизация выходного напряжения достигается путем воздействия сигнала обратной связи на величину амплитуды сигнала пилообразной формы. Возможно осуществлять образование
сигнала пилообразной формы от напряжения источника питания UBX. В этом случае достигается эффект параметрической стабилизации выходного напряжения.
Возможно также использование изменения сдвига фаз сигнала пилообразной формы относительно тактового сигнала, осуществляя этот сдвиг, например, в зависимости от величины входного или выходного напряжений,
В общем случае для сдвига фаз можно использовать любой другой необходимый сигнал.
Таким образом, при использовании предлагаемого способа достигается повышение точности стабилизации выходного напряжения, так как в обоих режимах стабилизации регулируется один и тот же уровень выходного напряжения, в то время как в известном способе при переходе с режима на режим изменяется регулируемый уровень выходного напряжения.
Реализация предлагаемого способа проще реализации известного способа из- за наличия только одного нуль-органа (компаратора) против двух в известном способе.
Формула изобретения 1, Способ управления импульсным стабилизатором постоянного напряжения, со- держащим последовательный и параллельный регулирующие элементы, заключающийся в формировании тактового сигнала и формировании сигнала пилообразной формы, имеющего частоту тактового сигнала, измерении входного или выходного напряжений стабилизатора, сравнении пилообразного сигнала с сигналом постоянного тока, причем один из этих сигналов
0
5
0 5
пропорционален величине измеренного входного или выходного напряжений стабилизатора, получении результирующего сигнала в интервале от начала действия пилообразного напряжения до момента его равенства сигналу постоянного тока и воздействии полученным результирующим сигналом на открывание последовательного регулирующего элемента в течение всего зремени действия этого сигнала, отличающийся тем, что, с целью повышения точности стабилизации выходного напряжения и упрощения осуществления, сигнал пилообразной формы сдвигают по фазе относительно тактового сигнала, а указанный результирующий сигнал сравнения упомянутого сигнала пилообразной формы и сигнала постоянного тока используют также для открывания параллельного регулирующего элемента в конечной части сигнала пилообразной формы, причем границей режимов работы стабилизатора является конец каждого тактового сигнала.
2. Способ по п. 1,отличающийся тем, что сигнал пилообразной формы сдвигают относительно тактового сигнала в зависимости от величины входного или выходного напряжений.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления двухтактным стабилизатором напряжения | 1988 |
|
SU1654799A1 |
| Способ импульсной стабилизации постоянного напряжения стабилизатора напряжения (его варианты) | 1980 |
|
SU949647A1 |
| Способ управления импульсным стабилизатором постоянного напряжения | 1988 |
|
SU1656508A1 |
| Способ импульсной стабилизации постоянного напряжения последовательного стабилизатора | 1975 |
|
SU541160A1 |
| Способ импульсной стабилизации постоянного напряжения двухтактного стабилизатора | 1978 |
|
SU734636A1 |
| Импульсный стабилизатор постоянного напряжения | 1976 |
|
SU596928A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2003 |
|
RU2254606C2 |
| Способ импульсной стабилизации напряжения постоянного тока | 1981 |
|
SU957190A1 |
| Импульсный стабилизатор постоянного напряжения | 1975 |
|
SU574709A1 |
| Способ управления регулятором переменного напряжения | 1988 |
|
SU1686417A1 |
Изобретение относится к источникам вторичного электропитания радиоэлектронной аппаратуры. Целью изобретения является повышение точности стабилизации выходного напряжения и упрощение осущест- вления. Способ используется для управления импульсным стабилизатором, содержащим последовательный и параллельный регулирующие элементы. Формируют пилообразное напряжение, сдвинутое по фазе относительно тактовой последовательности импульсов, и сравнивают пилообразное напряжение с управляющим сигналом. Сигнал, полученный от сравнения, используют для насыщения последовательного регулирующего элемента. Результат сравнения в конечной части пилообразного напряжения используют для насыщения параллельного регулирующего элемента, причем моментом его включения является момент окончания тактового сигнала. 1 з.п.ф-лы, 2 ил. со С
| Импульсный стабилизатор напряжения | 1984 |
|
SU1233129A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Моин B.C | |||
| Стабилизированные транзисторные преобразователи | |||
| М.: Энергоато- миздат, 1986 | |||
| стр | |||
| Насос | 1917 |
|
SU13A1 |
| Импульсный стабилизатор напряжения | 1985 |
|
SU1265740A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
